Faster R-CNN (Faster Region-based Convolutional Neural Networks)
Faster R-CNN 是一种高效的目标检测模型,它是在 R-CNN 系列(包括 R-CNN 和 Fast R-CNN)的基础上发展而来的,能够实现对图像中多个对象的检测。Faster R-CNN 引入了 Region Proposal Network (RPN),显著提升了目标检测的速度和准确性,成为现代目标检测任务中的基准方法之一。
Faster R-CNN 的工作原理
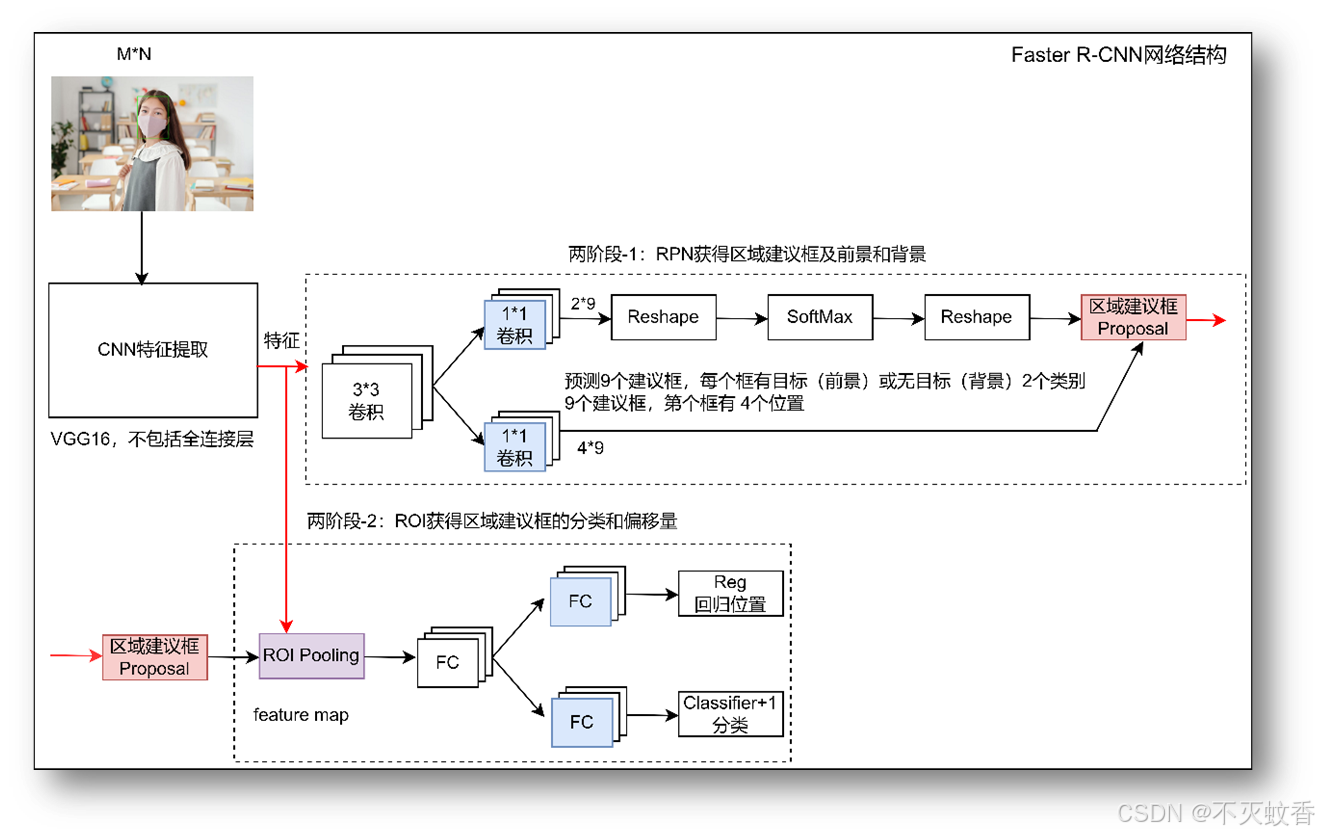
Faster R-CNN 主要由两部分组成:Region Proposal Network (RPN) 和 Fast R-CNN。这两部分网络通过共享卷积特征,使得整个检测过程非常高效。
1. Region Proposal Network (RPN)
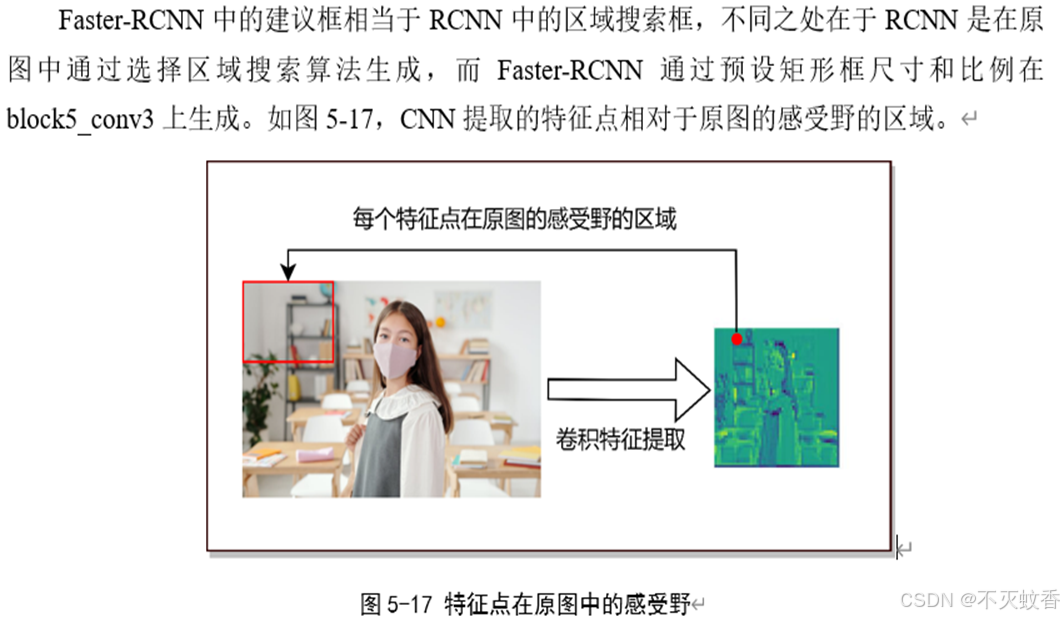
RPN 是 Faster R-CNN 中的核心创新,它负责生成候选区域(region proposals)。传统的目标检测方法,如 R-CNN 和 Fast R-CNN,依赖于外部的选择性搜索(Selective Search)算法来提取候选区域,而 RPN 通过学习的方式直接从图像特征中自动生成这些候选区域。
- RPN 结构:
- RPN 通过滑动窗口(通常为 3x3)在特征图上生成多个候选区域。
- 每个滑动窗口会输出一组区域候选框,并计算出每个候选框的 置信度分数(对象与背景的概率)。
- 同时,它还会生成每个候选框相对于锚框的 偏移量(坐标回归),用来调整候选框的位置。
- RPN 输入输出:
- 输入:图像的卷积特征图(由 CNN 网络提取)
- 输出:一组候选区域(bounding boxes)及其对应的得分(objectness scores)。
2. Fast R-CNN
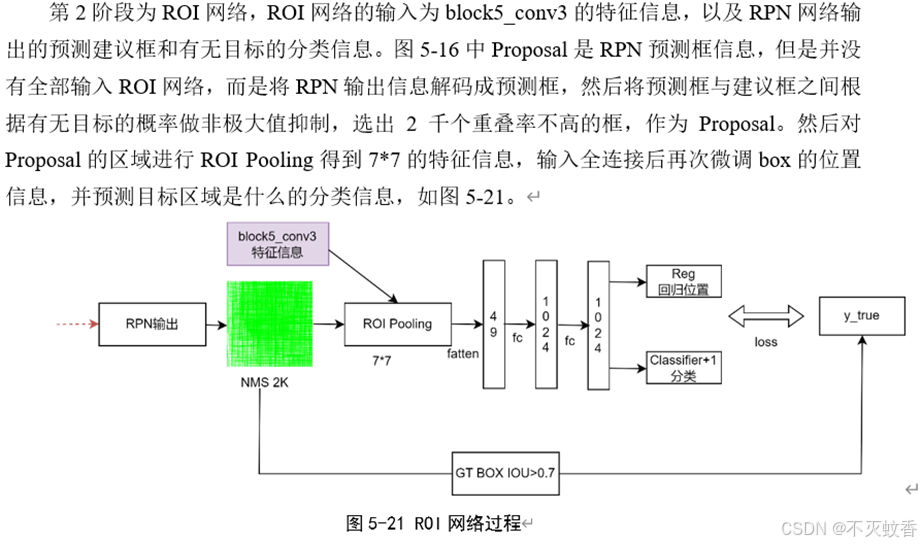
Fast R-CNN 是对传统 R-CNN 的改进,它将 RPN 生成的候选区域(Region Proposals)送入一个快速的卷积神经网络进行目标分类和边界框回归。
- Fast R-CNN 结构:
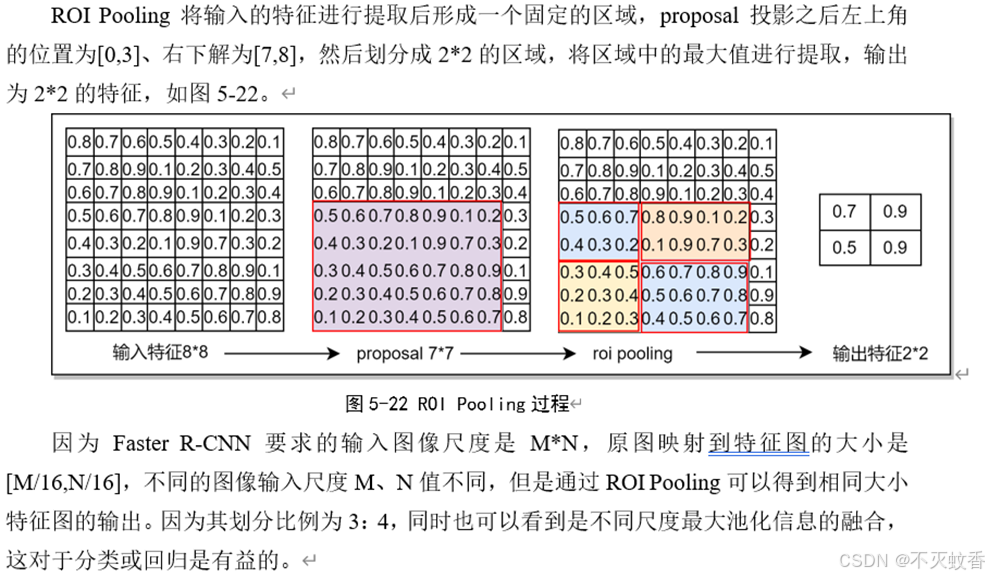
- 特征图通过 RoI Pooling(Region of Interest Pooling)层,按比例将候选框区域映射到固定大小的特征图上。
- 这些固定大小的特征图被输入到全连接层(Fully Connected Layer),用于分类和边界框回归。
- 分类任务:对每个候选区域进行物体类别分类。
- 边界框回归:细化每个候选框的边界框。
3. End-to-End Training
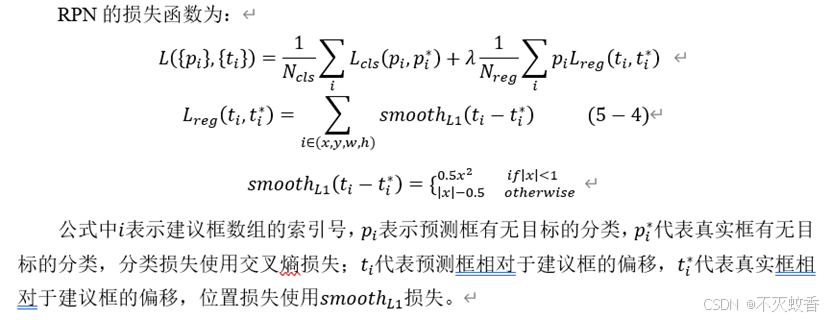
Faster R-CNN 使用 端到端训练(end-to-end training)方式,整个模型(包括 RPN 和 Fast R-CNN 部分)可以一起训练,通过反向传播更新权重。训练过程通过优化一个总的损失函数,结合了 RPN 的生成区域损失和 Fast R-CNN 的分类和回归损失。
Faster R-CNN 的工作流程
- 输入图像:图像通过一个卷积神经网络(如 VGG16、ResNet)提取特征图。
- RPN 网络:RPN 网络对特征图进行滑动窗口操作,生成候选区域(region proposals)。
- RoI Pooling:将生成的候选区域通过 RoI Pooling 层映射到固定大小的特征图。
- Fast R-CNN:对固定大小的特征图进行分类(识别目标类别)和回归(调整边界框位置)。
- 输出:最终得到的结果是目标类别、边界框位置和置信度分数。
Faster R-CNN 结构图
Faster R-CNN 的架构可分为两个主要部分:
- 共享卷积特征提取网络(CNN)
- Region Proposal Network (RPN)
- RoI Pooling 层
- 全连接层和分类/回归层
优势
- 高效:通过 RPN 生成候选区域,省去了传统方法(如选择性搜索)需要额外计算的步骤,大大提高了检测速度。
- 准确:通过共享卷积特征图,Faster R-CNN 可以同时进行目标检测和候选区域生成,从而减少了误差传播,提高了准确性。
- 端到端训练:整个模型可以端到端训练,不需要手动调节或额外的候选区域提取过程。
缺点
- 计算量大:尽管 RPN 改进了候选区域的生成过程,但整体的计算量和内存需求依然较高,尤其是在高分辨率图像上。
- 速度较慢:相较于后来的改进模型(如 SSD 和 YOLO),Faster R-CNN 的实时性较差,不适合需要高帧率的实时应用。
Faster R-CNN 的应用场景
Faster R-CNN 作为一个经典的目标检测方法,在许多应用中都有广泛的应用,尤其是对准确性要求较高的场景。
- 自动驾驶:检测道路上的行人、车辆、交通标志等。
- 视频监控:检测并追踪视频中的物体。
- 医学影像分析:如肿瘤检测、器官分割等。
Faster R-CNN 的改进和扩展
-
Mask R-CNN: Mask R-CNN 是在 Faster R-CNN 基础上进一步发展的模型,除了目标检测外,还增加了 语义分割(即为每个物体生成像素级的分割掩码)。这使得 Mask R-CNN 既能够进行物体检测,又能够进行语义分割,适用于更多细粒度的图像分析任务。
-
FPN (Feature Pyramid Network): FPN 是一种增强型特征提取方法,通过在多个尺度上提取特征,能够处理不同大小的物体检测任务,改善了 Faster R-CNN 在多尺度物体检测中的性能。
-
双向特征金字塔(BiFPN):这是在 FPN 基础上的进一步改进,能够在不同尺度和层次上灵活地进行特征融合,提升检测精度。
总结
Faster R-CNN 是一个经典的目标检测算法,它通过引入 Region Proposal Network (RPN) 使得目标检测变得更加高效。尽管它仍然面临计算资源和实时性问题,但其在准确性上的表现仍然是非常优秀的,并且成为了后续许多检测算法(如 Mask R-CNN、YOLO 等)的基础。