定时器简介
1.TIM(Timer)定时器
2.定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断
3.16位计数器、预分频器、自动重装寄存器的时基单元,在72MHz计数时钟下可以实现最大59.65s的定时
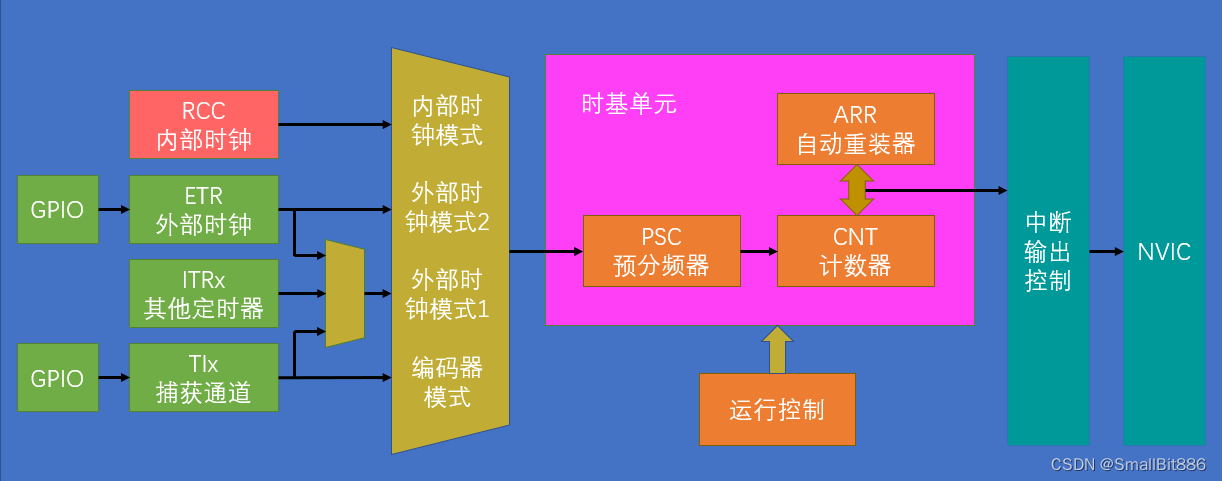
4.不仅具备基本的定时中断功能,而且还包含内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等多种功能
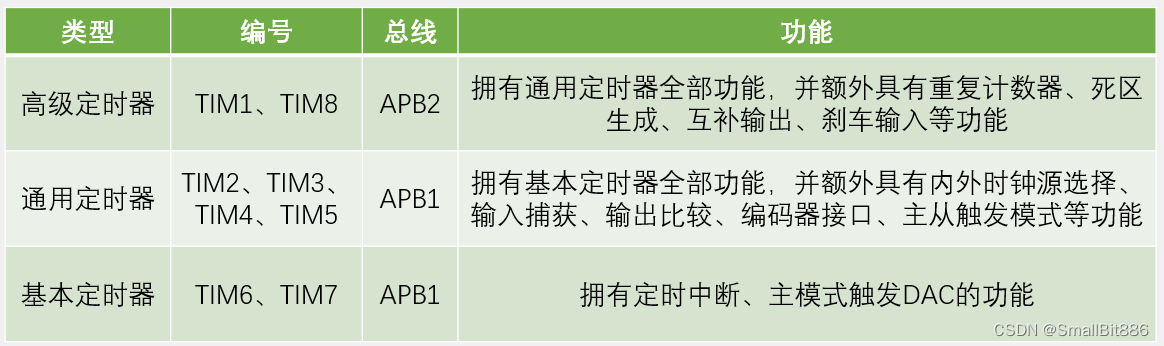
5.根据复杂度和应用场景分为了高级定时器、通用定时器、基本定时器三种类型
定时器类型
STM32F103C8T6定时器资源:TIM1、TIM2、TIM3、TIM4
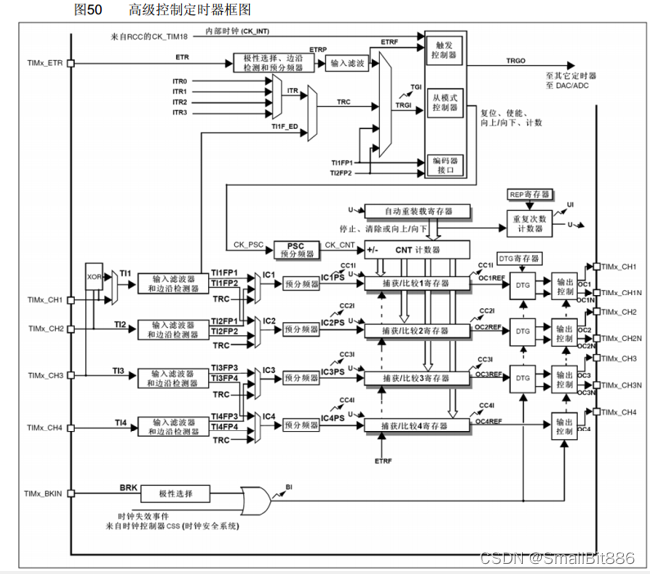
高级定时器框图
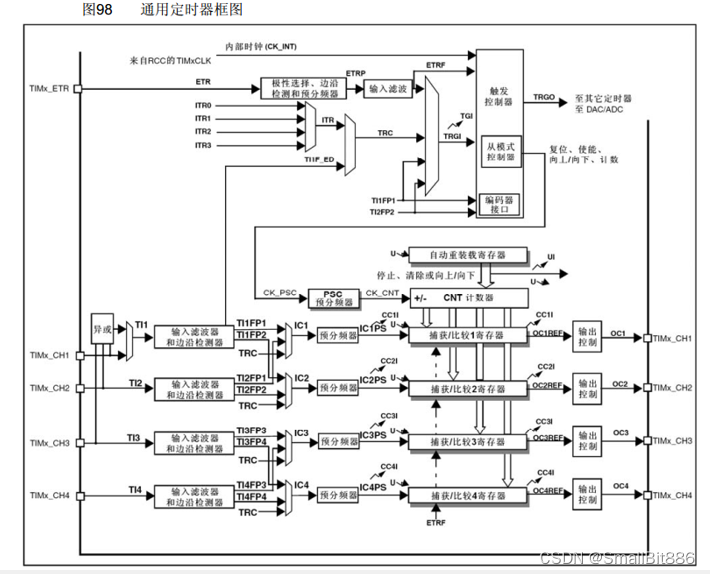
通用定时器框图
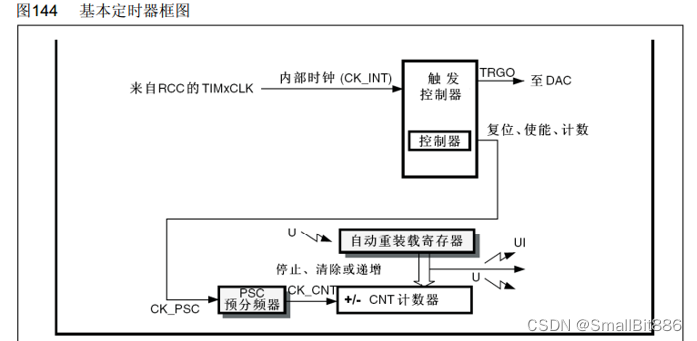
基本定时器框图
定时器中断基本结构
计数器频率
1.计数器计数频率:CK_CNT = CK_PSC / (PSC + 1)
计数器计数频率 = 时钟源频率 / 预分频系数
2.计数器溢出频率:CK_CNT_OV = CK_CNT / (ARR + 1)
= CK_PSC / (PSC + 1) / (ARR + 1)
计数器溢出频率 = 时钟源频率 / 预分频系数 /自动重装载寄存器
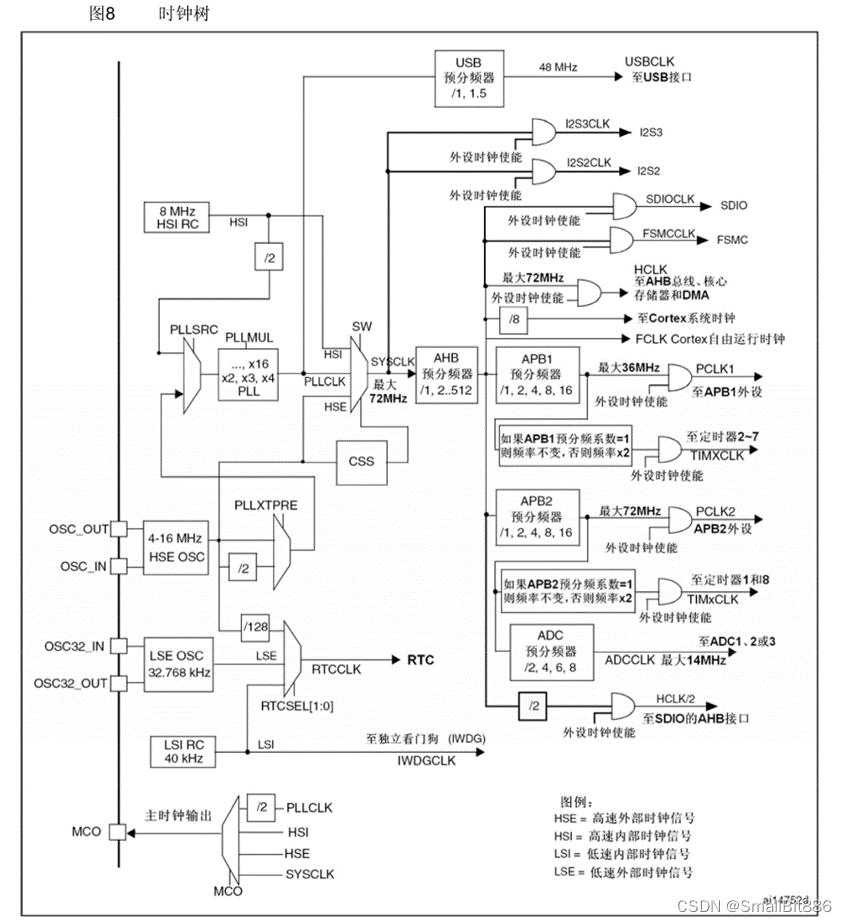
RCC时钟树
输出比较简介
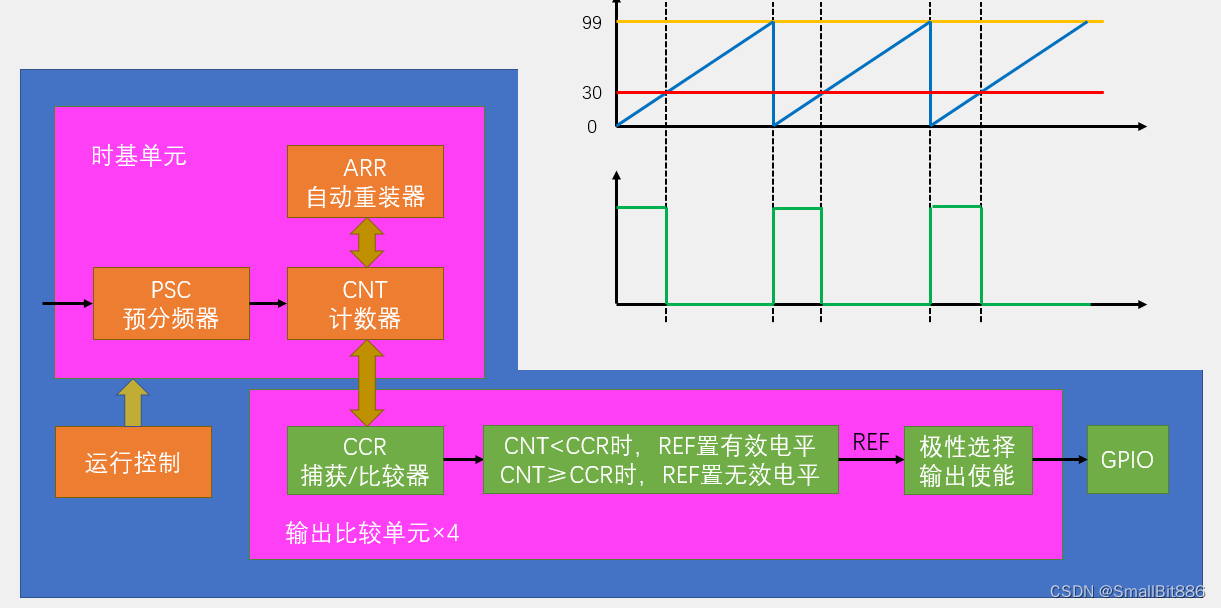
1.OC(Output Compare)输出比较
2.输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形
3.每个高级定时器和通用定时器都拥有4个输出比较通道
4.高级定时器的前3个通道额外拥有死区生成和互补输出的功能
PWM简介
1.PWM(Pulse Width Modulation)脉冲宽度调制
2.在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域
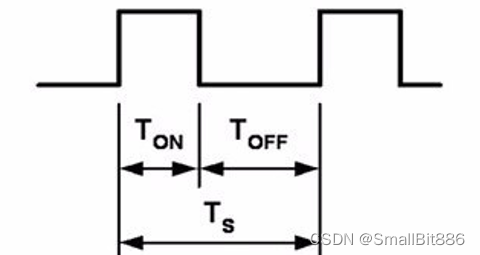
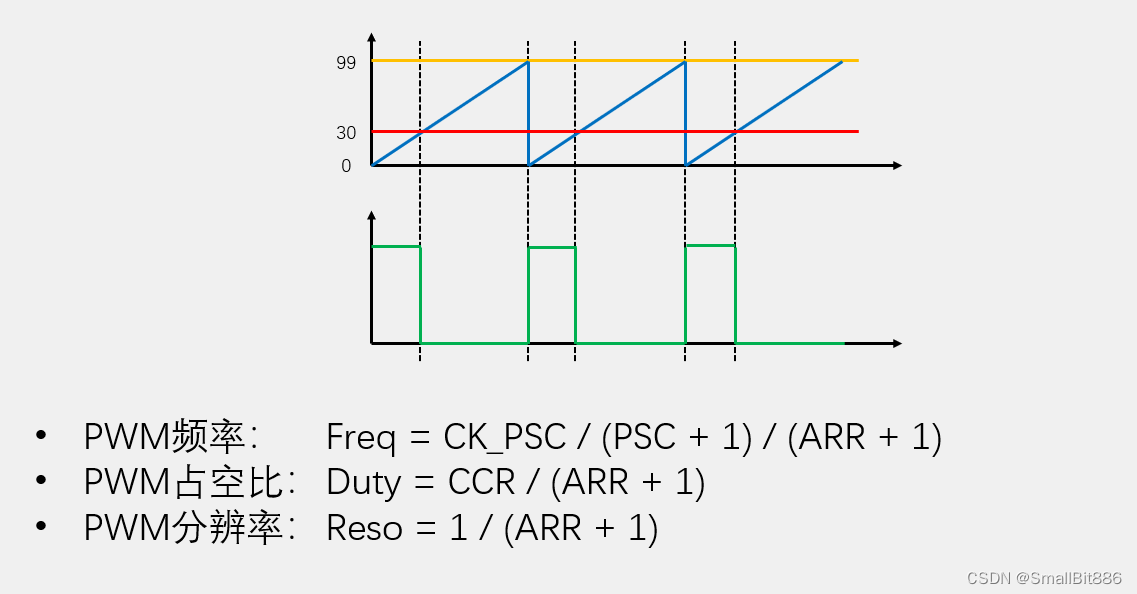
3.PWM参数:
频率 = 1 / 一个周期时间 占空比 = 高电平时间 / 一个周期时间 分辨率 = 占空比变化步距
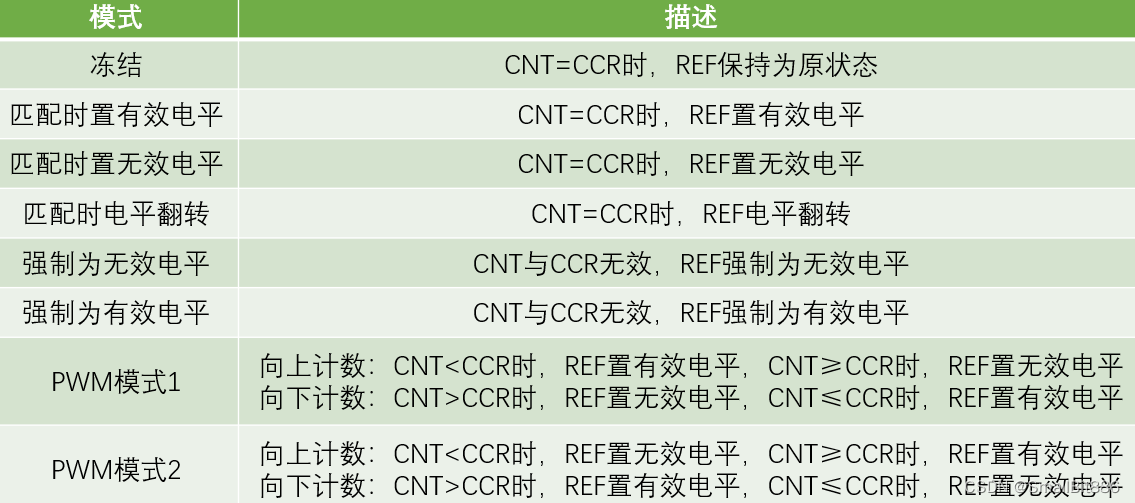
输出比较模式
PWM基本结构
参数计算
以TIM1(高级定时器)配置,编写用于输出PWM驱动代码
pwm.c
#include "PWM.h"
/**
* @brief 定时器1
* @param PA8-通道1 PA11-通道4
* @retval 用于输出PWM
* @attention TIM_CtrlPWMOutputs(TIM1,ENABLE);高级定时器专属--MOE主输出使能
*/
void TIM1_Init(u16 per,u16 psc)
{
/******************************开启时钟*****************************/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //开启定时器1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIO时钟
/*****************************定义结构体变量******************************/
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
/****************************配置引脚的模式*******************************/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/****************************配置时基单元*******************************/
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //1/2/4分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInitStructure.TIM_Period = per; //ARR:自动重装载寄存器的值 Freq = CK_PSC/(PSC+1)/(ARR+1)
TIM_TimeBaseInitStructure.TIM_Prescaler = psc; //PSC:预分频系数,72MHz,那么可以给PSC=0,36MHz计数时,那么就给PSC=1
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//TIM_RepetitionCounter:重复计数,也就是重复多少次才发生计数溢出中断。官方注释里面这个数只与TIM1和TIM8有关
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
TIM_CtrlPWMOutputs(TIM1,ENABLE);高级定时器专属--MOE主输出使能
/******************************输出比较单元配置*****************************/
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//比较输出模式选择
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//比较输出极性,可选为高电平有效或低电平有效
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //比较输出脉冲宽度,实际设定比较寄存器 CCR 的值,决定脉冲宽度。可设置范围为 0 至 65535。PWM占空比:Duty = CCR / (ARR + 1) = CCR / 100
TIM_OC1Init(TIM1, &TIM_OCInitStructure);//结构体初始化
TIM_OC4Init(TIM1, &TIM_OCInitStructure);//结构体初始化
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);//使能或者失能 TIMx 在 CCRx 上的预装载寄存器
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable);//使能或者失能 TIMx 在 CCRx 上的预装载寄存器
TIM_Cmd(TIM1, ENABLE);//开启定时器
}
pwm.h
#ifndef __PWM_H
#define __PWM_H
#include "sys.h"
void TIM1_Init(u16 per,u16 psc);
#endif