初始化(GNSS与VIO融合)
GNSS初始化(coarse-to-fine)
- GNSS 初始化决定了state的预测结果
- 在线初始化可以从任意情况下恢复初始state
- anchor point 的局部和全局坐标已知(用于GNSS 全局系和VIO的局部系融合)
- 前提: a. VIO系统已经完成初始化,如重力向量,初始速度,初始IMU bias,尺度)
b. 局部地图系上的光滑轨迹可用于GNSS-VI 的初始化 - 步骤:
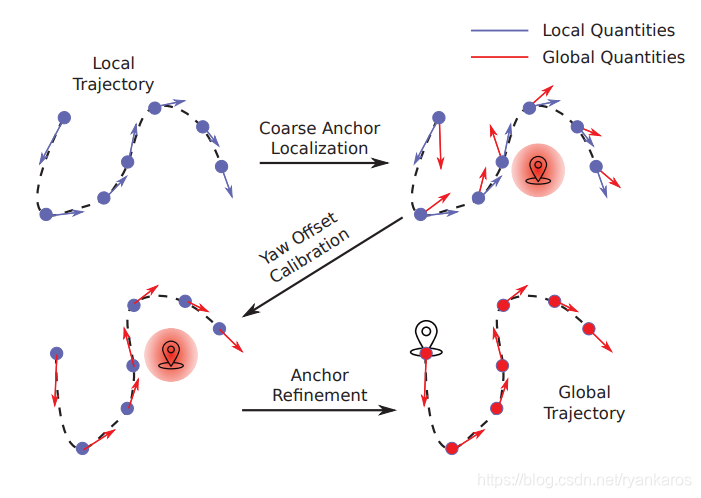
a. Coarse anchor point localization: 使用GNSS 的SPP算法(输入:滑窗内的所有伪距),由于滑窗是位于一段空间和时间上的,SPP的结果是当前串口的平均位置
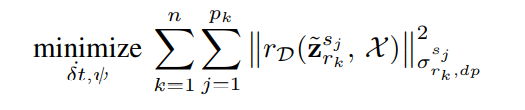
b. Yaw offset calibration: 校准位于ENU frame和local frame间的yaw offset航线偏移(使用低噪声的Doppler Measurement),通过下式可获得初始yaw offset和接收器时钟漂移速率
n为滑窗的大小,pk为第k个epoch观察到的的卫星数量。滑窗内,假设速度恒为VIO求得的结果,k时刻的时钟漂移率恒定。上一步求得的 Coarse anchor point localization用于计算方向向量和旋转矩阵。优化变量为Yaw offset ψ和滑窗内平均时钟漂移速率。优化后,ENU frame和local frame完成校准。
c. Anchor Point Refinement: 完善上一步得到的coarse anchor point,并调整local frame下的轨迹实现在ECEF frame中的alignment. Anchor Point由之前ENU frame的原点变为local frame的原点。 图示见下图:
Frame介绍
- sensor frame(传感器系)
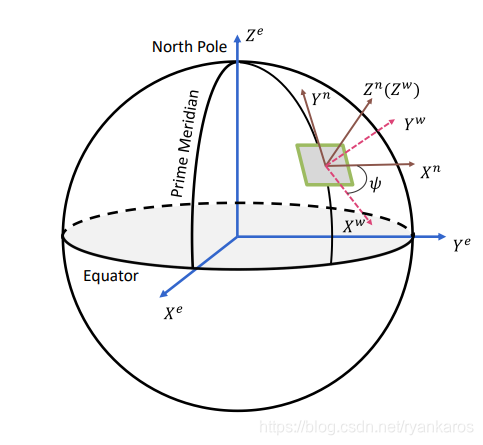
- local world frame(局部系:VIO系统所在系,原点可为任意点,Z轴垂直与lcoal ground plane–红色虚线
- ECEF frame(Earth-Centered,Earth-Fixed:相对于地球的Cartesian坐标系,原点在地球中心处,Z轴垂直于赤道指向正北,下,x,y轴与赤道相交,x轴指向本初子午线—蓝色实线
- ENU frame(Earth-nurth up) 站心地平坐标系:作用是连接local frame和全局ECEF frame,x指向东,y指向北,z向上。对于任意一个ECEF上的点,都有唯一的ENU frame(此ENU原点在ECEF目标点上—黑色实线
- 注: 对于local frame和ENU frame,Z轴都平行于重力方向
ECEF 和local frame间转化关系
- 已知接收器在ECEF下坐标,欲求接收器在local下的坐标,需通过anchor point
- ENU坐标的建立就为了解决此问题
- 已知anchor point在ECEF下坐标,从ENU到ECEF的旋转矩阵为:
φ and λ是纬度和经度
从ENU到local的旋转矩阵R为yaw offset ψ
因此,ECEF到local frame
方程为:接收器在ECEF位置=旋转矩阵*接收器与anchor在local 下位置差+anchor在ECEF中位置
理解:

- 需要求接收器ECEF上位置,已知local 位置,所以需要R矩阵
- 因为接收器在移动,所以R矩阵需要从Anchor确定
- anchor用于ENU的引入,因为anchor的local 和ECEF坐标都已知,所以可以作为frame转换的中间媒介
- anchor值固定,R矩阵也因此可以得出