1. z 变换
单位脉冲响应为 h [ n ] h[n] h[n] 的离散时间线性时不变系统对复指数输入 z n z^n zn 的响应 y [ n ] y[n] y[n] 为
(1) y [ n ] = H ( z ) z n \tag{1} y[n] = H(z) z^{n} y[n]=H(z)zn(1)
式中 H ( z ) H(z) H(z) 是一个复常数,为
(2) H [ z ] = ∑ n = − ∞ + ∞ h [ n ] z − n \tag 2 H[z] =\sum_{n=-\infty}^{+\infty}h[n]z^{-n} H[z]=n=−∞∑+∞h[n]z−n(2)
若 z = e j ω z=e^{j\omega} z=ejω,这里 ω \omega ω 为实数(即, ∣ z ∣ = 1 |z|=1 ∣z∣=1),则(2)式的求和式就是 h [ n ] h[n] h[n] 的离散时间傅里叶变换。在更为一般的情况下,当 ∣ z ∣ |z| ∣z∣ 不限制为 1 的时候,(2)式就称为 h [ n ] h[n] h[n] 的 z z z 变换。
一个离散时间信号 x [ n ] x[n] x[n] 的 z z z 变换定义为
(3) X ( z ) = △ ∑ n = − ∞ + ∞ x [ n ] z − n \tag 3 \boxed{X(z) \overset{\triangle}{=}\sum_{n=-\infty}^{+\infty}x[n]z^{-n}} X(z)=△n=−∞∑+∞x[n]z−n(3)
若将复变量 z z z 表示成极坐标形式
(4) z = r e j ω \tag{4} z = r e^{j\omega} z=rejω(4)
用 r r r 表示 z z z 的模,而用 ω \omega ω 表示它的相角。利用 r r r 和 ω \omega ω,(3)式就变为
(5) X ( r e j ω ) = ∑ n = − ∞ + ∞ x [ n ] ( r e j ω ) − n = ∑ n = − ∞ + ∞ { x [ n ] r − n } e − j ω n \tag 5 X(r e^{j\omega}) =\sum_{n=-\infty}^{+\infty}x[n](r e^{j\omega})^{-n} = \sum_{n=-\infty}^{+\infty}\{x[n]r^{-n}\} e^{-j\omega n} X(rejω)=n=−∞∑+∞x[n](rejω)−n=n=−∞∑+∞{x[n]r−n}e−jωn(5)
由此可见, X ( r e j ω ) X(r e^{j\omega}) X(rejω) 就是序列 x [ n ] x[n] x[n] 乘以实指数 r − n r^{-n} r−n 后的傅里叶变换,即
(6) X ( r e j ω ) = F { x [ n ] r − n } \tag 6 X(r e^{j\omega}) =\displaystyle \mathcal F\{x[n]r^{-n}\} X(rejω)=F{x[n]r−n}(6)
在 z z z 变换中当变换变量 z z z 的模为 1 时,即 z = e j ω z=e^{j\omega} z=ejω, z z z 变换就演变为傅里叶变换。于是,傅里叶变换就成为在复数 z z z 平面中,半径为 1 的圆上的 z z z 变换。在 z z z 平面上,这个圆称为单位圆。
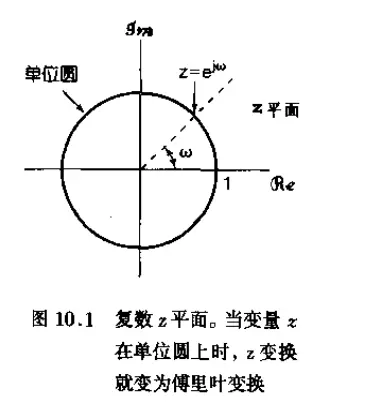
一般来说,对于某一序列的 z z z 变换,存在着某一个 z z z 值的范围,对该范围内的 z z z, X ( z ) X(z) X(z) 收敛,这样一些值的范围就称为收敛域(ROC)。如果 ROC 包括单位圆,则傅里叶变换也收敛。
-
例 1
-
例 2


2. z z z 变换的收敛域
性质 1: X ( z ) X(z) X(z) 的 R O C ROC ROC 是在 z z z 平面上以原点为中心的圆环。
性质 2: R O C ROC ROC 内不包含任何极点。
性质 3:如果 x [ n ] x[n] x[n] 是有限长序列,那么 R O C ROC ROC 就是整个 z z z 平面,可能除去 z = 0 z=0 z=0 和/或 z = ∞ z=\infty z=∞。

性质 4:如果 x [ n ] x[n] x[n] 是一个右边序列,并且 ∣ z ∣ = r 0 |z|=r_0 ∣z∣=r0 的圆位于 R O C ROC ROC 内,那么 ∣ z ∣ > r 0 |z|>r_0 ∣z∣>r0 的全部有限 z z z 值都一定在这个 R O C ROC ROC 内。
性质 5:如果 x [ n ] x[n] x[n] 是一个左边序列,并且 ∣ z ∣ = r 0 |z|=r_0 ∣z∣=r0 的圆位于 R O C ROC ROC 内,那么 $ 0< |z| < r_0$ 的全部 z z z 值都一定在这个 R O C ROC ROC 内。
性质 6:如果 x [ n ] x[n] x[n] 是双边序列,并且 ∣ z ∣ = r 0 |z|=r_0 ∣z∣=r0 的圆位于 R O C ROC ROC 内,那么该 R O C ROC ROC 一定是由包括 ∣ z ∣ = r 0 |z|=r_0 ∣z∣=r0 的圆环所组成。
性质 7:如果 x [ n ] x[n] x[n] 的 z z z 变换 X ( z ) X(z) X(z) 是有理的,那么它的 R O C ROC ROC 就被极点所界定,或者延伸到无限远。
性质 8:如果 x [ n ] x[n] x[n] 的 z z z 变换 X ( z ) X(z) X(z) 是有理的,而且若 x [ n ] x[n] x[n] 是右边序列,那么, R O C ROC ROC 就位于 z z z 平面内最外层极点的外边;也就是半径等于 X ( z ) X(z) X(z) 极点中最大模值的圆的外边。而且,若 x [ n ] x[n] x[n] 是因果序列(即 x [ n ] x[n] x[n] 为 n < 0 n<0 n<0 等于 0 0 0 的右边序列),那么, R O C ROC ROC 也包括 z = ∞ z=\infty z=∞。
性质 9:如果 x [ n ] x[n] x[n] 的 z z z 变换 X ( z ) X(z) X(z) 是有理的,而且若 x [ n ] x[n] x[n] 是左边序列,那么, R O C ROC ROC 就位于 z z z 平面内最里层的非零极点的里边;也就是半径等于 X ( z ) X(z) X(z) 中除去 z = 0 z=0 z=0 的极点中最小模值的圆的里边,并且向内延伸到可能包括 z = 0 z=0 z=0。特别地,若 x [ n ] x[n] x[n] 是反因果序列(即 x [ n ] x[n] x[n] 为 n > 0 n>0 n>0 等于 0 0 0 的左边序列),那么, R O C ROC ROC 也包括 z = 0 z=0 z=0。
3. z z z 反变换
对(6)式两边进行傅里叶反变换可得
(7) F − 1 X ( r e j ω ) = x [ n ] r − n \tag 7 \displaystyle \mathcal F^{-1}X(r e^{j\omega}) =x[n]r^{-n} F−1X(rejω)=x[n]r−n(7)
因此
(8) x [ n ] = r n F − 1 X ( r e j ω ) = r n 1 2 π ∫ 2 π X ( r e j ω ) e j ω n d ω \tag 8 x[n] = r^{n} \displaystyle \mathcal F^{-1}X(r e^{j\omega}) = r^{n} \frac{1}{2\pi} \int_{2\pi}X(r e^{j\omega}) e^{j\omega n}d\omega x[n]=rnF−1X(rejω)=rn2π1∫2πX(rejω)ejωndω(8)
将 r n r^n rn 的指数因子移进积分号内,则有
(9) x [ n ] = 1 2 π ∫ 2 π X ( r e j ω ) ( r e j ω ) n d ω \tag 9 x[n] = \frac{1}{2\pi} \int_{2\pi}X(r e^{j\omega}) (re^{j\omega})^ nd\omega x[n]=2π1∫2πX(rejω)(rejω)ndω(9)
也就是说,将 z z z 变换沿着在 R O C ROC ROC 内 z = r e j ω z=re^{j\omega} z=rejω, r r r 固定而 ω \omega ω 在一个 2 π 2\pi 2π 区间内变化的闭合围线上求值,就能将 x [ n ] x[n] x[n] 恢复出来。
现在将积分变量从 ω \omega ω 改为 z z z。由于 z = r e j ω z=re^{j\omega} z=rejω, r r r 固定, d z = j r e j ω d ω = j z d ω dz=jre^{j\omega}d\omega=jzd\omega dz=jrejωdω=jzdω,或者 d ω = ( 1 / j ) z − 1 d z d\omega=(1/j)z^{-1}dz dω=(1/j)z−1dz。这样,(9)式中在 ω \omega ω 的 2 π 2\pi 2π 区间的积分,利用 z z z 以后,就对应于变量 z z z 在环绕 ∣ z ∣ = r |z|=r ∣z∣=r 的圆上一周的积分。
(10) x [ n ] = 1 2 π j ∮ X ( z ) z n − 1 d z \tag{10} x[n] = \frac{1}{2\pi j} \oint X(z) z^ {n-1}dz x[n]=2πj1∮X(z)zn−1dz(10)
式中, ∮ \oint ∮ 记为在半径为 r r r,以原点为中心的封闭圆上沿逆时针方向环绕一周的积分。 r r r 的值可选为使 X ( z ) X(z) X(z) 收敛的任何值,也就是使 ∣ z ∣ = r |z|=r ∣z∣=r 的积分围线位于 R O C ROC ROC 的任何值。
- 确定 z z z 反变换的一种方法就是先进行部分分式展开,然后逐项求其反变换。

这种方法依赖于将 X ( z ) X(z) X(z) 展开成如下形式的部分分式:
(11) X ( z ) = ∑ i = 1 m A i 1 − a i z − 1 \tag{11} X(z) = \sum_{i=1}^{m} \frac{A_i}{1-a_iz^{-1}} X(z)=i=1∑m1−aiz−1Ai(11)
若 X ( z ) X(z) X(z) 的 R O C ROC ROC 是位于极点 z = a i z=a_i z=ai 的外边,那么其对应项的反变换就是 A i a i n u [ n ] A_i a_i^n u[n] Aiainu[n];另一方面,若 X ( z ) X(z) X(z) 的 R O C ROC ROC 是位于极点 z = a i z=a_i z=ai 的里面,那么对应项的反变换就是 − A i a i n u [ − n − 1 ] -A_i a_i^n u[-n-1] −Aiainu[−n−1]。
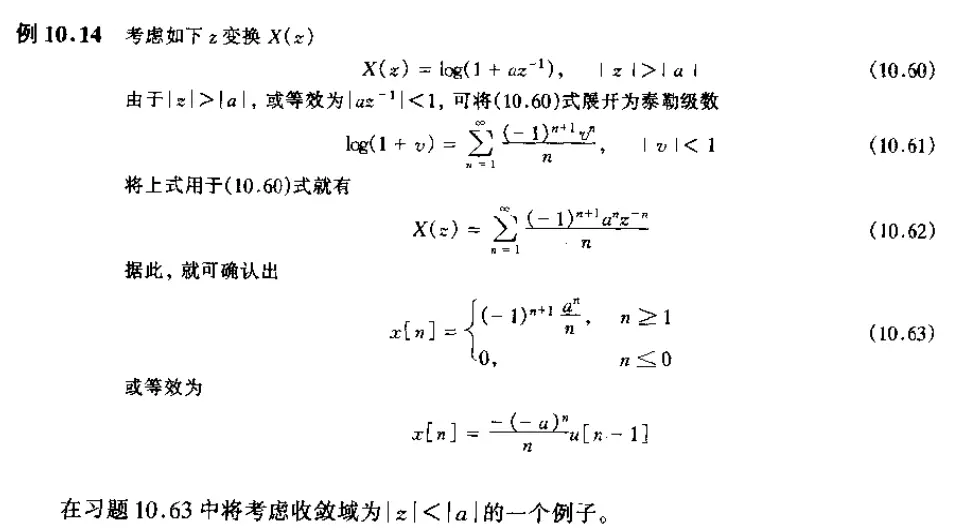
- 确定 z z z 反变换的另一种方法是建立在 X ( z ) X(z) X(z) 的幂级数展开的基础之上。由 $ X(z) =\sum_{n=-\infty}{+\infty}x[n]z{-n}$ 可知,实际上 z z z 变换就是涉及 z z z 的正幂和负幂的一个幂级数,这个幂级数的系数就是序列值 x [ n ] x[n] x[n]。
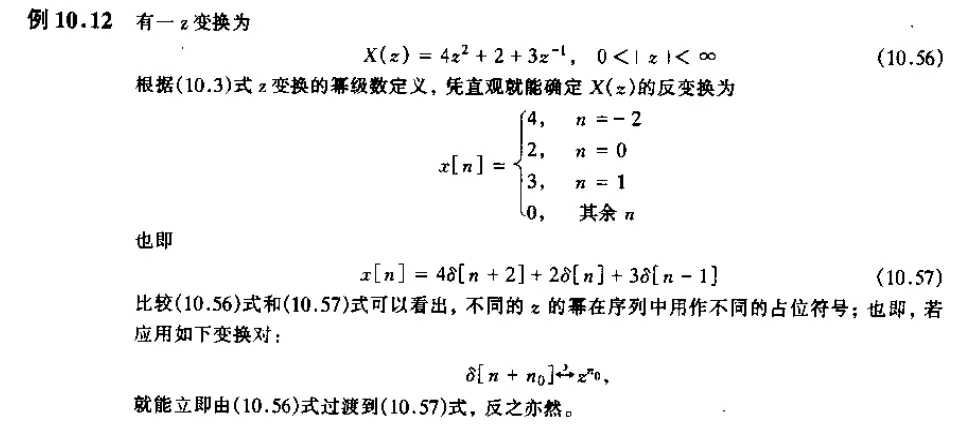
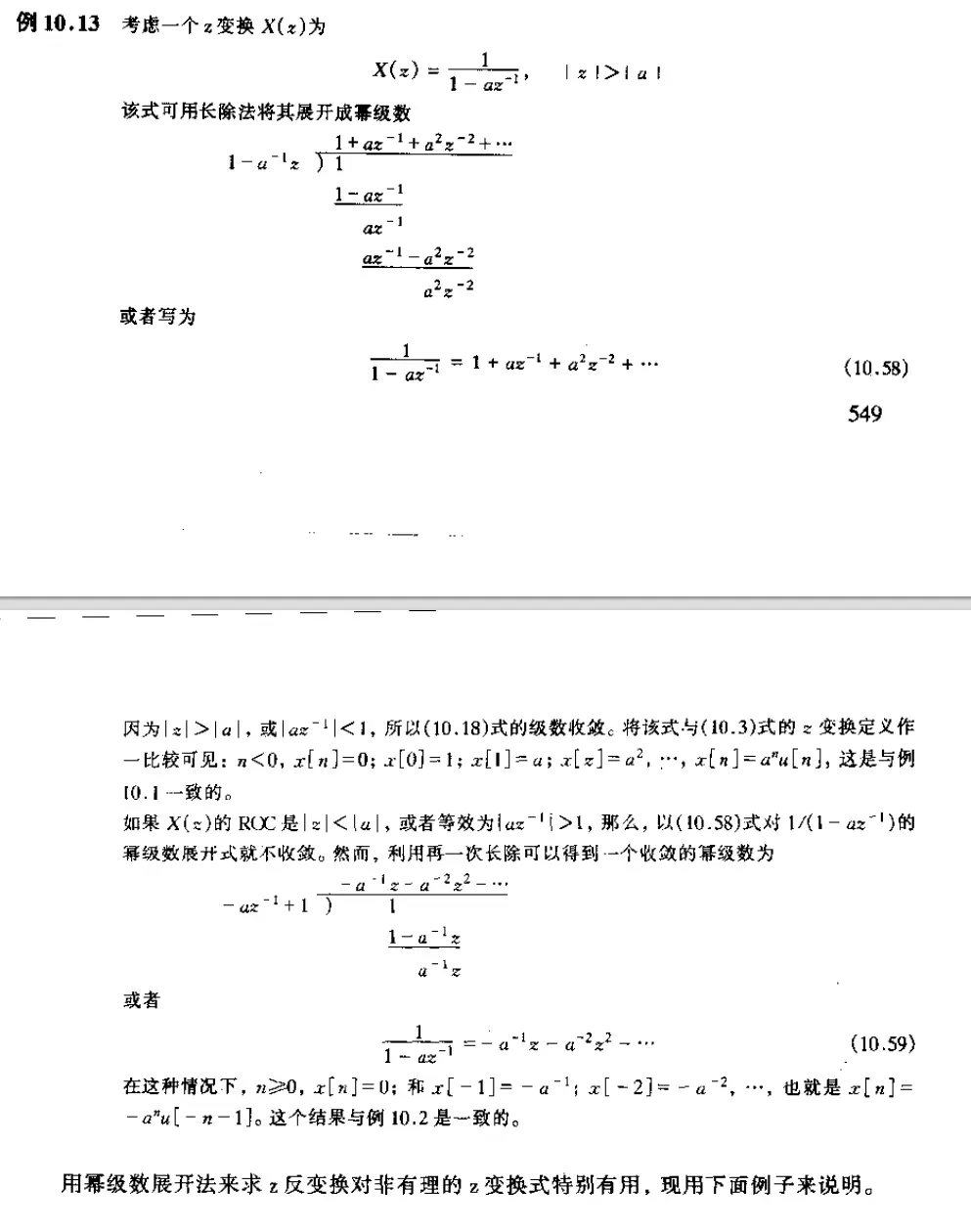
用幂级数展开法来求 z z z 反变换对非有理的 z z z 变换式特别有用。
4. z z z 变换的性质
4.1. 线性
若
x 1 [ n ] ↔ z X 1 ( z ) R O C = R 1 x_1[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X_1(z) \quad ROC=R_1 x1[n]↔zX1(z)ROC=R1
和
x 2 [ n ] ↔ z X 2 ( z ) R O C = R 2 x_2[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X_2(z) \quad ROC=R_2 x2[n]↔zX2(z)ROC=R2
则
(12) a x 1 [ n ] + b x 2 [ n ] ↔ z a X 1 ( z ) + b X 2 ( z ) R O C 包 括 R 1 ∩ R 2 \tag{12} \boxed{ ax_1[n]+bx_2[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} aX_1(z)+bX_2(z) \quad ROC \space包括 \space R_1 \cap R_2} ax1[n]+bx2[n]↔zaX1(z)+bX2(z)ROC 包括 R1∩R2(12)
4.2. 时移性质
若
x [ n ] ↔ z X ( z ) R O C = R x[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X(z) \quad ROC=R x[n]↔zX(z)ROC=R
则
(13) x [ n − n 0 ] ↔ z z − n 0 X ( z ) R O C = R 原 点 或 无 限 远 点 可 能 加 上 或 除 掉 \tag{13} \boxed{ x[n-n_0] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} z^{-n_0}X(z) \quad ROC=R \space 原点或无限远点可能加上或除掉} x[n−n0]↔zz−n0X(z)ROC=R 原点或无限远点可能加上或除掉(13)
4.3. z z z 域尺度变换
若
x [ n ] ↔ z X ( z ) R O C = R x[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X(z) \quad ROC=R x[n]↔zX(z)ROC=R
则
(14) z 0 n x [ n ] ↔ z X ( z z 0 ) R O C = ∣ z 0 ∣ R \tag{14} \boxed{ z_0^nx[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X(\frac{z}{z_0}) \quad ROC=|z_0|R } z0nx[n]↔zX(z0z)ROC=∣z0∣R(14)
这就是说,若 z z z 是在 X ( z ) X(z) X(z) 的 R O C ROC ROC 内的一点,那么点 ∣ z 0 ∣ z |z_0|z ∣z0∣z 就在 X ( z / z 0 ) X(z/z_0) X(z/z0) 的 R O C ROC ROC 内。
4.4. 时间反转
若
x [ n ] ↔ z X ( z ) R O C = R x[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X(z) \quad ROC=R x[n]↔zX(z)ROC=R
则
(15) x [ − n ] ↔ z X ( 1 z ) R O C = 1 R \tag{15} \boxed{ x[-n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X(\frac{1}{z}) \quad ROC=\frac{1}{R} } x[−n]↔zX(z1)ROC=R1(15)
这就是说,若 z 0 z_0 z0 是在 x [ n ] x[n] x[n] 的 z z z 变换 R O C ROC ROC 内,那么点 1 / z 0 1/z_0 1/z0 就在 x [ − n ] x[-n] x[−n] 的 z z z 变换 R O C ROC ROC 内。
4.5. 时间扩展
若令 k k k 是一个正整数,并且定义
(16) x ( k ) [ n ] = { x [ n / k ] 当 n 为 k 的 整 数 倍 0 , 当 n 不 为 k 的 整 数 倍 \tag{16} x_{(k)}[n] = \begin{cases} x[n/k] &\text 当\space n \space为\space k\space的整数倍 \\ 0, &\text 当\space n \space不为\space k\space的整数倍 \end{cases} x(k)[n]={x[n/k]0,当 n 为 k 的整数倍当 n 不为 k 的整数倍(16)
若
x [ n ] ↔ z X ( z ) R O C = R x[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X(z) \quad ROC=R x[n]↔zX(z)ROC=R
则
(17) x ( k ) [ n ] ↔ z X ( z k ) R O C = R 1 / k \tag{17} \boxed{ x_{(k)}[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X(z^k) \quad ROC=R^{1/k} } x(k)[n]↔zX(zk)ROC=R1/k(17)
这就是说,若 z z z 是在 X ( z ) X(z) X(z) 的 R O C ROC ROC 内,那么点 z 1 / k z^{1/k} z1/k 就在 X ( z k ) X(z^k) X(zk) 的 R O C ROC ROC 内。
4.6. 共轭
若
x [ n ] ↔ z X ( z ) R O C = R x[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X(z) \quad ROC=R x[n]↔zX(z)ROC=R
则
(18) x ∗ [ n ] ↔ z X ∗ ( z ∗ ) R O C = R \tag{18} \boxed{ x^*[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X^*(z^*) \quad ROC=R } x∗[n]↔zX∗(z∗)ROC=R(18)
4.7. 卷积性质
若
x 1 [ n ] ↔ z X 1 ( z ) R O C = R 1 x_1[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X_1(z) \quad ROC=R_1 x1[n]↔zX1(z)ROC=R1
和
x 2 [ n ] ↔ z X 2 ( z ) R O C = R 2 x_2[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X_2(z) \quad ROC=R_2 x2[n]↔zX2(z)ROC=R2
则
(19) x 1 [ n ] ∗ x 2 [ n ] ↔ z X 1 ( z ) X 2 ( z ) R O C 包 括 R 1 ∩ R 2 \tag{19} \boxed{ x_1[n] * x_2[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X_1(z)X_2(z) \quad ROC \space包括 \space R_1 \cap R_2} x1[n]∗x2[n]↔zX1(z)X2(z)ROC 包括 R1∩R2(19)
4.8. z z z 域微分
若
x [ n ] ↔ z X ( z ) R O C = R x[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} X(z) \quad ROC=R x[n]↔zX(z)ROC=R
则
(20) n x [ n ] ↔ z − z d X ( z ) d z R O C = R \tag{20} \boxed{ nx[n] \overset{{\displaystyle {\mathcal {z}}}}{\leftrightarrow} -z\frac{dX(z)}{dz} \quad ROC=R } nx[n]↔z−zdzdX(z)ROC=R(20)
4.9. 初值定理
若 n < 0 , x [ n ] = 0 n <0, x[n]=0 n<0,x[n]=0,则
(21) x [ 0 ] = lim z → ∞ X ( z ) \tag{21} x[0] = \lim_{z\to \infty}X(z) x[0]=z→∞limX(z)(21)
4.10. 终值定理
若 n < 0 , x [ n ] = 0 n <0, x[n]=0 n<0,x[n]=0,其 z z z 变换的极点,除可以有一个一阶极点在 z = 1 z=1 z=1 上,其它极点均在单位圆内,则
(21) lim n → ∞ x [ n ] = lim z → 1 ( z − 1 ) X ( z ) \tag{21} \lim_{n\to \infty}x[n] = \lim_{z\to 1}(z-1)X(z) n→∞limx[n]=z→1lim(z−1)X(z)(21)
4.11. 性质小结

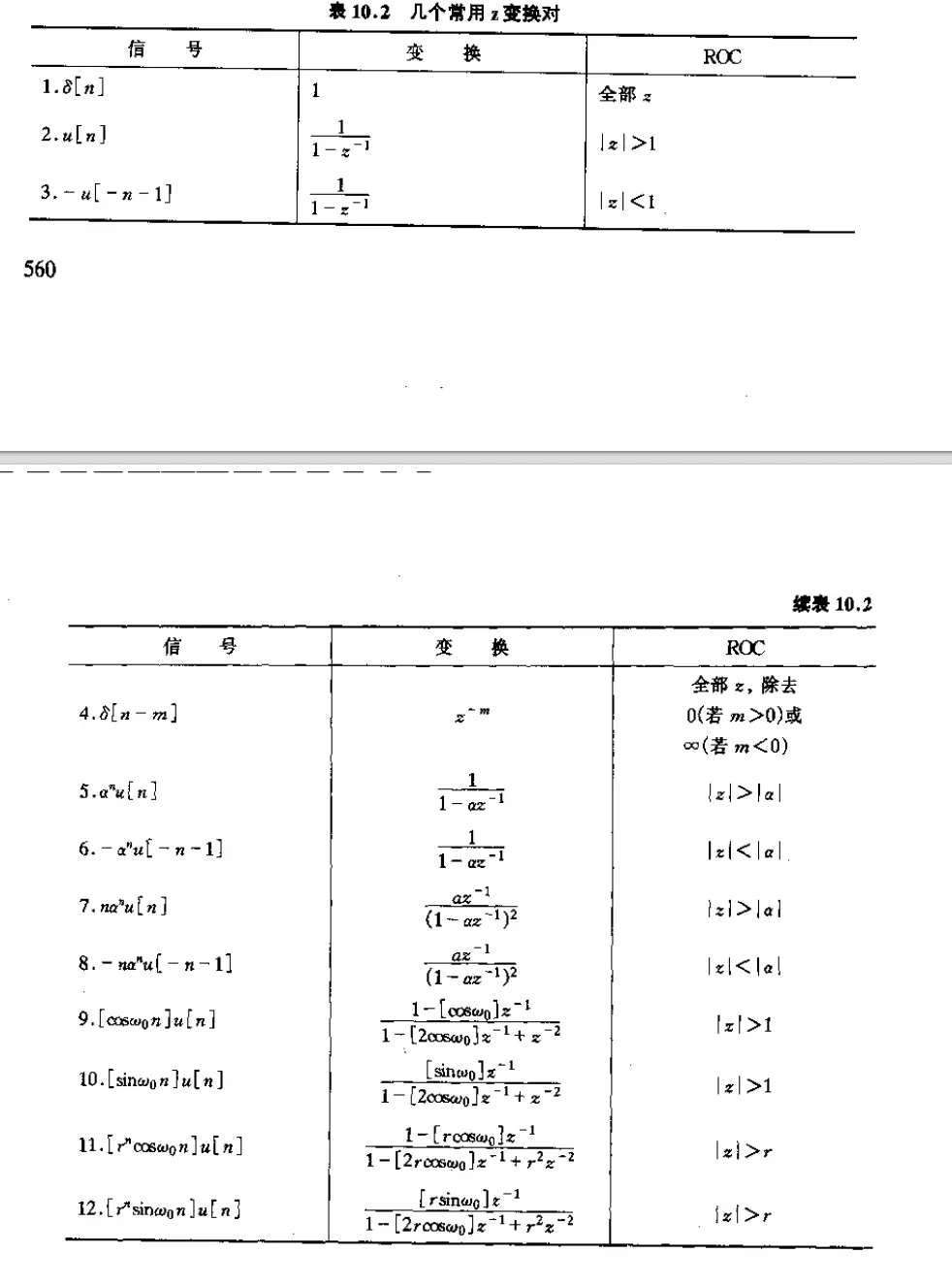
4.12. 几个常用的 z z z 变换对
5. 利用 z z z 变换分析与表征线性时不变系统
在离散时间 L T I LTI LTI 系统的分析和表示中, z z z 变换有其特别重要的作用,由卷积性质可得
(23) Y ( z ) = H ( z ) X ( z ) \tag{23} Y(z) = H(z) X(z) Y(z)=H(z)X(z)(23)
式中 X ( z ) 、 Y ( z ) 、 H ( z ) X(z)、Y(z) 、H(z) X(z)、Y(z)、H(z) 分别是系统输入、输出和单位脉冲响应的 z z z 变换 。 H ( z ) H(z) H(z) 称为系统的系统函数或转移函数。
5.1. 因果性
一个因果 L T I LTI LTI 系统其单位脉冲响应 h [ n ] h[n] h[n]是对于 n < 0 , h [ n ] = 0 n<0,h[n] = 0 n<0,h[n]=0,因此是一个右边序列。由性质 4 知道 H ( z ) H(z) H(z) 的 R O C ROC ROC 是位于 z z z 平面内某一个圆的外边。由性质 8 可知,对于一个因果序列,这个幂级数中,
(24) H ( z ) = ∑ n = 0 ∞ h [ n ] z − n \tag{24} H(z) =\sum_{n=0}^{\infty}h[n]z^{-n} H(z)=n=0∑∞h[n]z−n(24)
不包含任何 z z z 的正幂次项,因此 R O C ROC ROC 包括无限远点。综上所述,就得出如下属性:
一个离散时间 L T I LTI LTI 系统当且仅当它的系统函数的 R O C ROC ROC 是在某一个圆的外边,且包括无限远点,该系统就是因果的。
如果 H ( z ) H(z) H(z) 是有理的,那么该系统要是因果的,其 R O C ROC ROC 必须位于最外层极点的外边,且无限远点必须在 R O C ROC ROC 内;等效地说,随 z → ∞ z\to \infty z→∞ 时, H ( z ) H(z) H(z) 的极限必须是有限的。这就等效于,当 H ( z ) H(z) H(z) 的分子和分母都是表示成的 z z z 的多项式时,其分子的阶次不会大于分母的阶次。即
一个具有有理系统函数 H ( z ) H(z) H(z) 的 L T I LTI LTI 系统要是因果的,当且仅当:(1) R O C ROC ROC 位于最外层极点某一个圆的外面;和 (2) 若 H ( z ) H(z) H(z) 表示成 z z z 的多项式之比,其分子的阶次不能大于分母的阶次。

5.2. 稳定性
一个离散时间 L T I LTI LTI 系统的稳定性就等效于它的单位脉冲响应是绝对可和的,在这种情况下, h [ n ] h[n] h[n] 的傅里叶变换收敛,结果就是 H ( z ) H(z) H(z) 的 R O C ROC ROC 必须包括单位圆。综上所述,可得如下结果:
一个 L T I LTI LTI 系统当且仅当它的系统函数 H ( z ) H(z) H(z) 的 R O C ROC ROC 包括单位圆,该系统就是稳定的。
对于一个具有有理系统函数的因果系统而言, R O C ROC ROC 位于最外层极点的外边。对于这个包括单位圆的 R O C ROC ROC ,系统的全部极点都必须位于单位圆内,即
一个具有有理系统函数的因果 L T I LTI LTI 系统,当且仅当 H ( z ) H(z) H(z) 的全部极点都位于单位圆内时,也即全部极点模均小于 1 时,系统就是稳定的。
5.3. 由线性常系数差分方程表征的 L T I LTI LTI 系统
对于一般的 N N N 阶差分方程,可以对方程两边进行 z z z 变换,并利用线性和时移性质。现考虑一个 L T I LTI LTI 系统,其输入、输出满足如下线性常系数差分方程:
(25) ∑ k = 0 N a k y [ n − k ] = ∑ k = 0 M b k x [ n − k ] \tag{25} \sum_{k=0}^{N}a_ky[n-k] = \sum_{k=0}^{M}b_kx[n-k] k=0∑Naky[n−k]=k=0∑Mbkx[n−k](25)
对式(25)两边取 z z z 变换,可得
(26) ∑ k = 0 N a k z − k Y ( z ) = ∑ k = 0 M b k z − k X ( z ) \tag{26} \sum_{k=0}^{N}a_k z^{-k}Y(z) = \sum_{k=0}^{M}b_k z^{-k}X(z) k=0∑Nakz−kY(z)=k=0∑Mbkz−kX(z)(26)
这样就有
(27) H ( z ) = Y ( z ) X ( z ) = ∑ k = 0 M b k z − k ∑ k = 0 N a k z − k \tag{27} H(z) = \frac{Y(z)}{X(z)} = \frac{\displaystyle \sum_{k=0}^{M}b_k z^{-k}}{\displaystyle \sum_{k=0}^{N}a_k z^{-k}} H(z)=X(z)Y(z)=k=0∑Nakz−kk=0∑Mbkz−k(27)

获取更多精彩,请关注「seniusen」!
