文章目录
前言
Apollo星火计划课程链接如下
星火计划2.0基础课:https://apollo.baidu.com/community/online-course/2
星火计划2.0专项课:https://apollo.baidu.com/community/online-course/12
TASK系列解析文章
1.【Apollo学习笔记】——规划模块TASK之LANE_CHANGE_DECIDER
2.【Apollo学习笔记】——规划模块TASK之PATH_REUSE_DECIDER
3.【Apollo学习笔记】——规划模块TASK之PATH_BORROW_DECIDER
4.【Apollo学习笔记】——规划模块TASK之PATH_BOUNDS_DECIDER
5.【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_PATH_OPTIMIZER
6.【Apollo学习笔记】——规划模块TASK之PATH_ASSESSMENT_DECIDER
7.【Apollo学习笔记】——规划模块TASK之PATH_DECIDER
8.【Apollo学习笔记】——规划模块TASK之RULE_BASED_STOP_DECIDER
9.【Apollo学习笔记】——规划模块TASK之SPEED_BOUNDS_PRIORI_DECIDER&&SPEED_BOUNDS_FINAL_DECIDER
10.【Apollo学习笔记】——规划模块TASK之SPEED_HEURISTIC_OPTIMIZER
11.【Apollo学习笔记】——规划模块TASK之SPEED_DECIDER
12.【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_SPEED_OPTIMIZER
13.【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER(一)
14.【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER(二)
1. 速度规划算法总体介绍
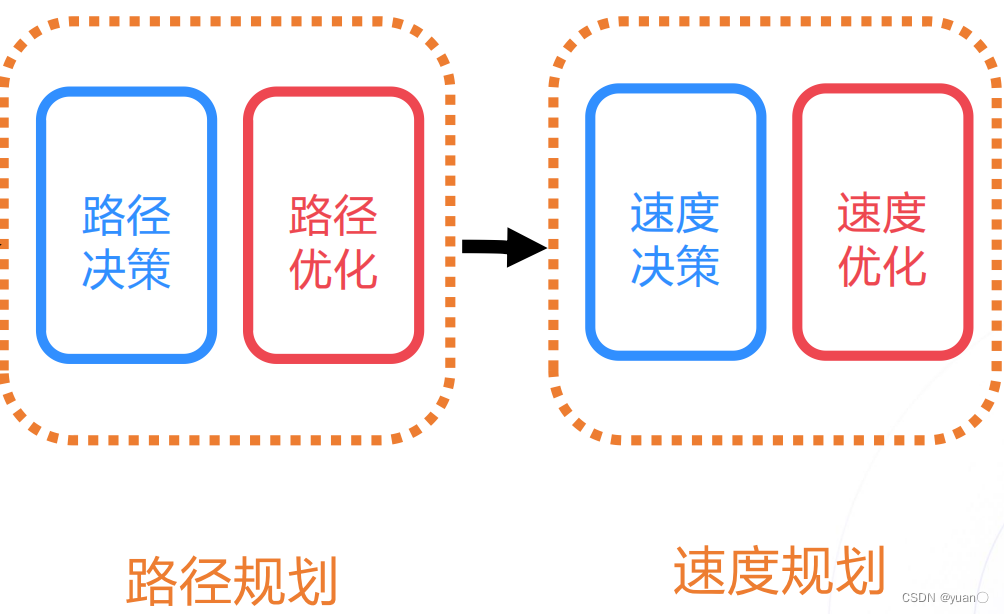
Apollo中对路径规划解耦,分为路径规划与速度规划两部分。并将规划分为决策与优化两个部分。
• 路径规划 —— 静态环境(道路,静止/低速障碍物)
• 速度规划 —— 动态环境(中/高速障碍物)
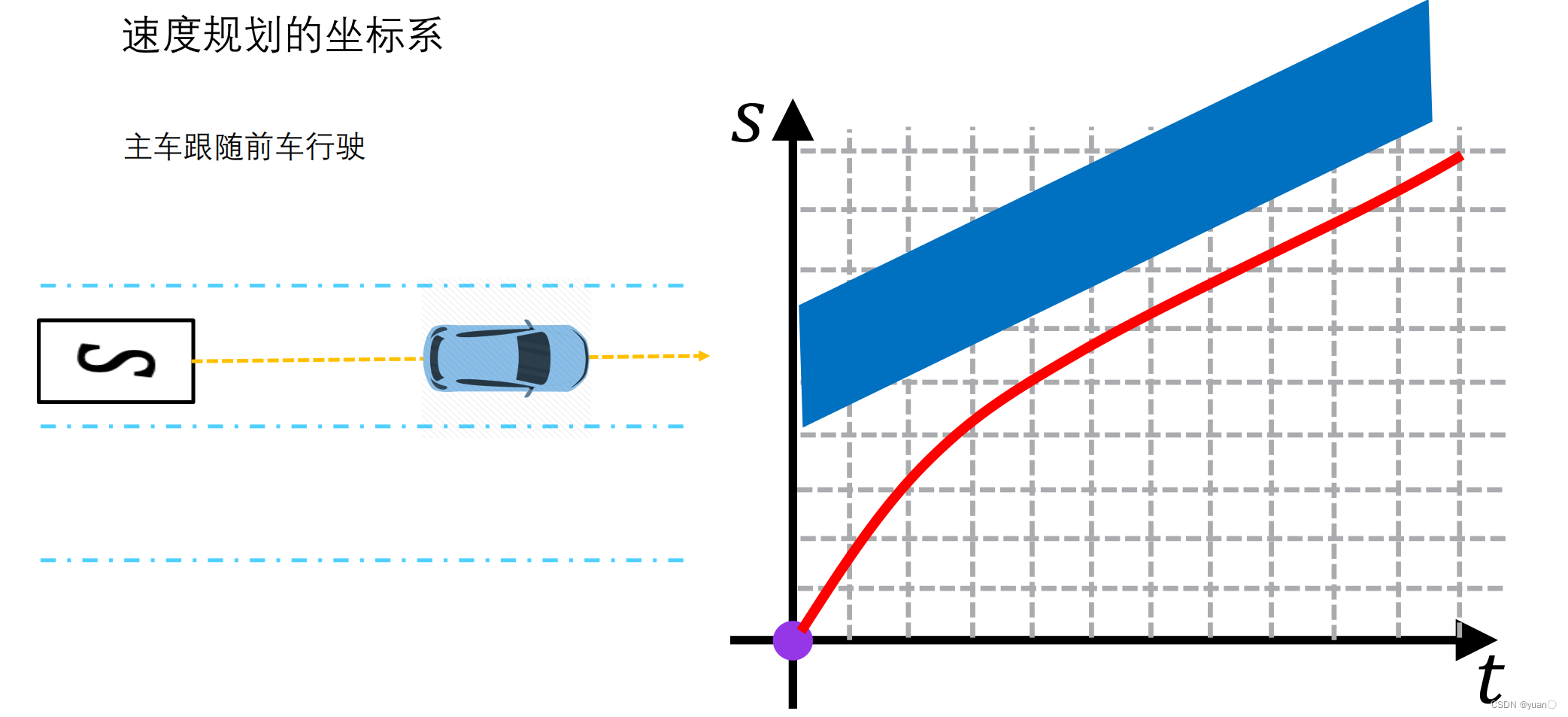
## 1.1 速度规划的坐标系
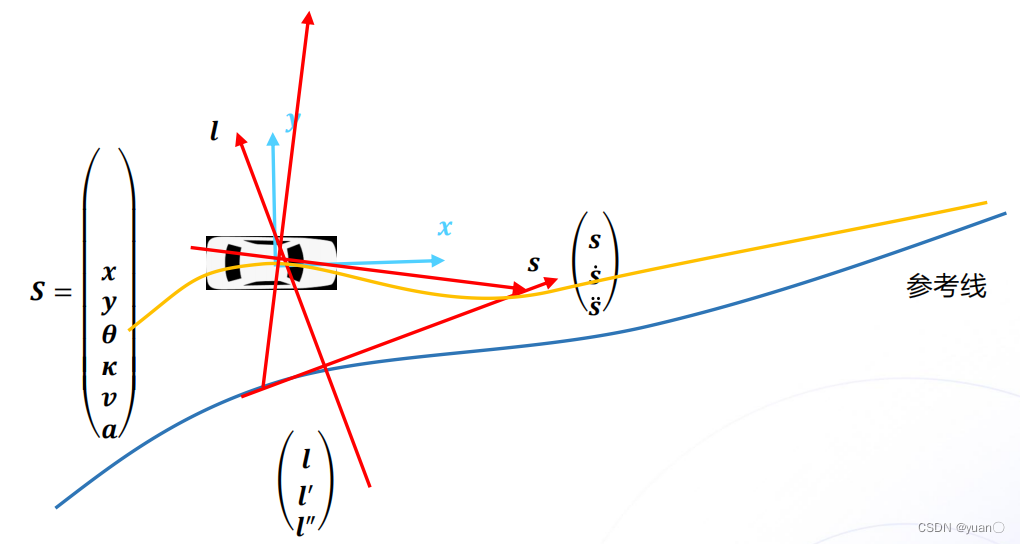
注意:速度规划的 s s s沿着轨迹的方向,路径规划的 s s s沿着参考线的方向。
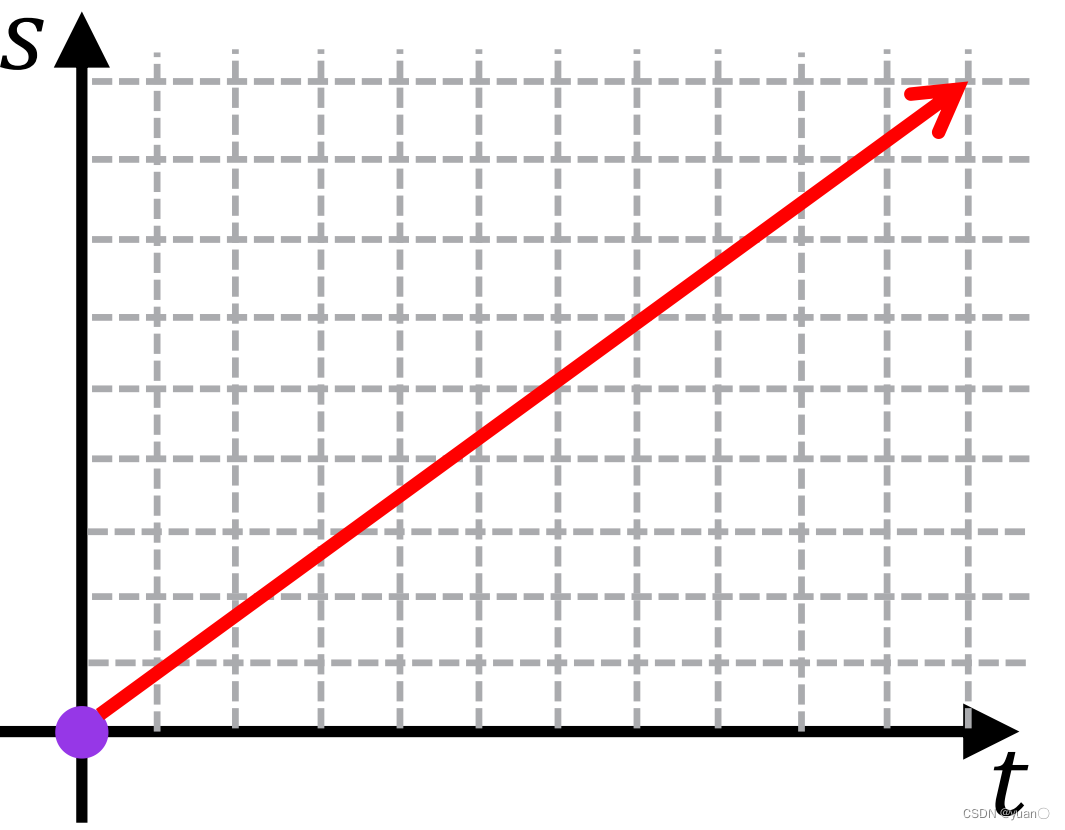
1.2 不同场景下的ST图
1.2.1 主车向前匀速行驶
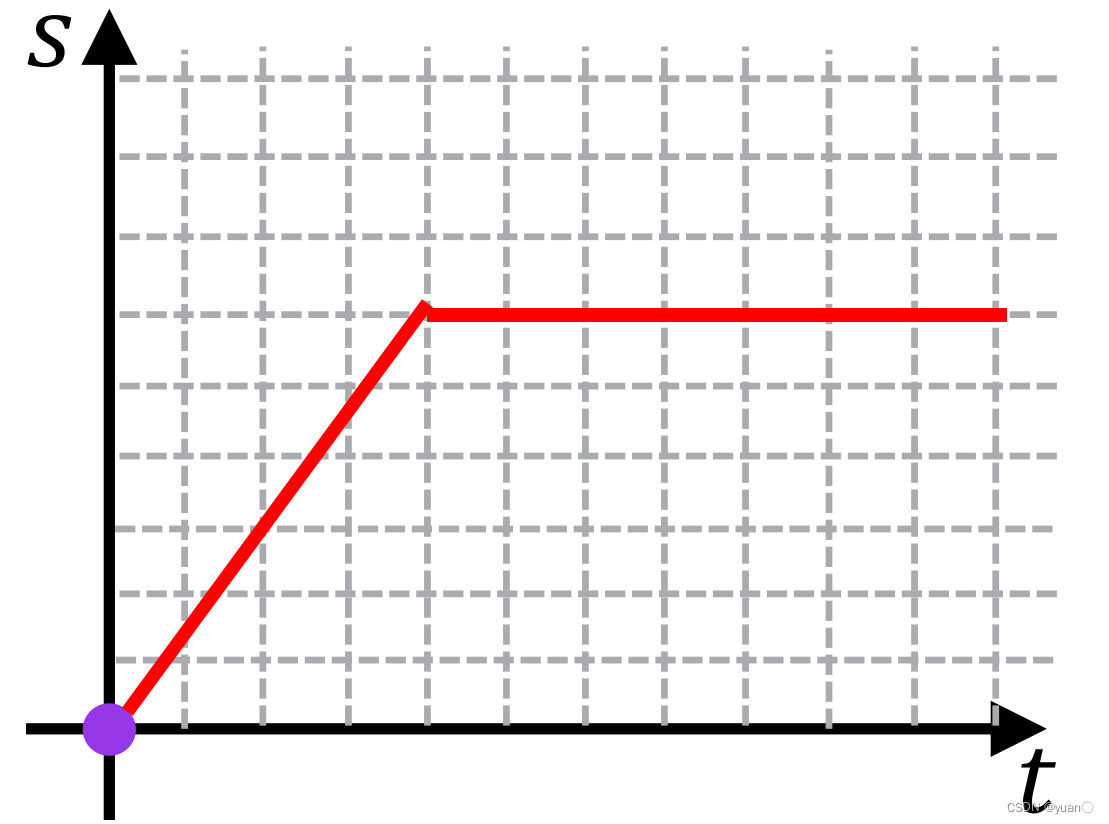
1.2.2 主车先向前匀速行驶,后停车
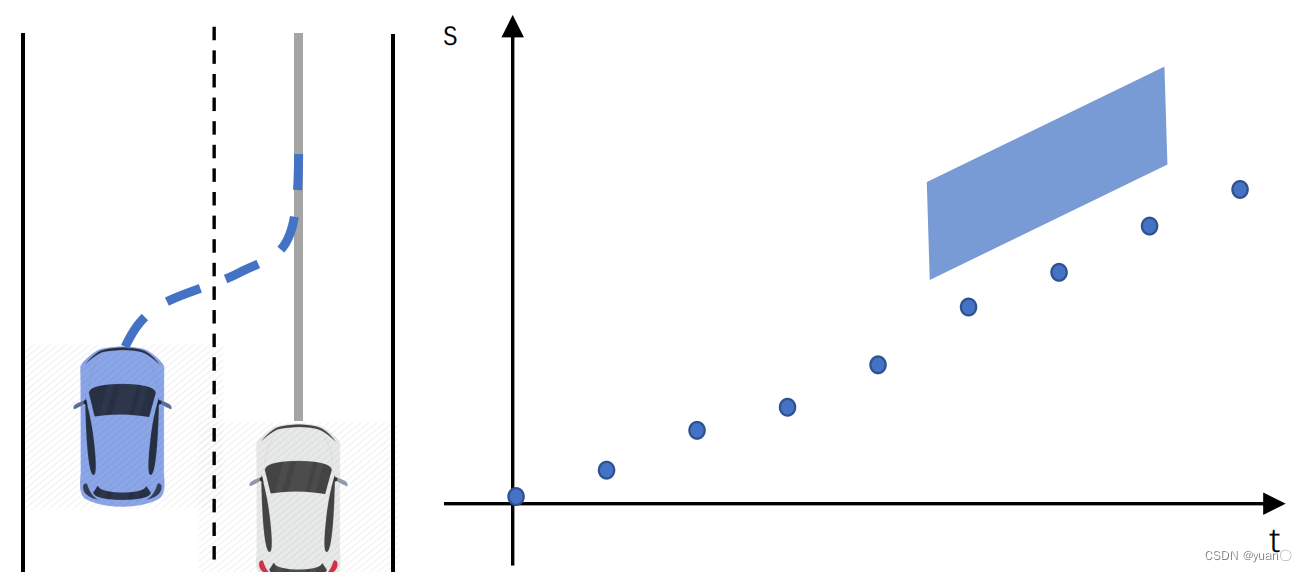
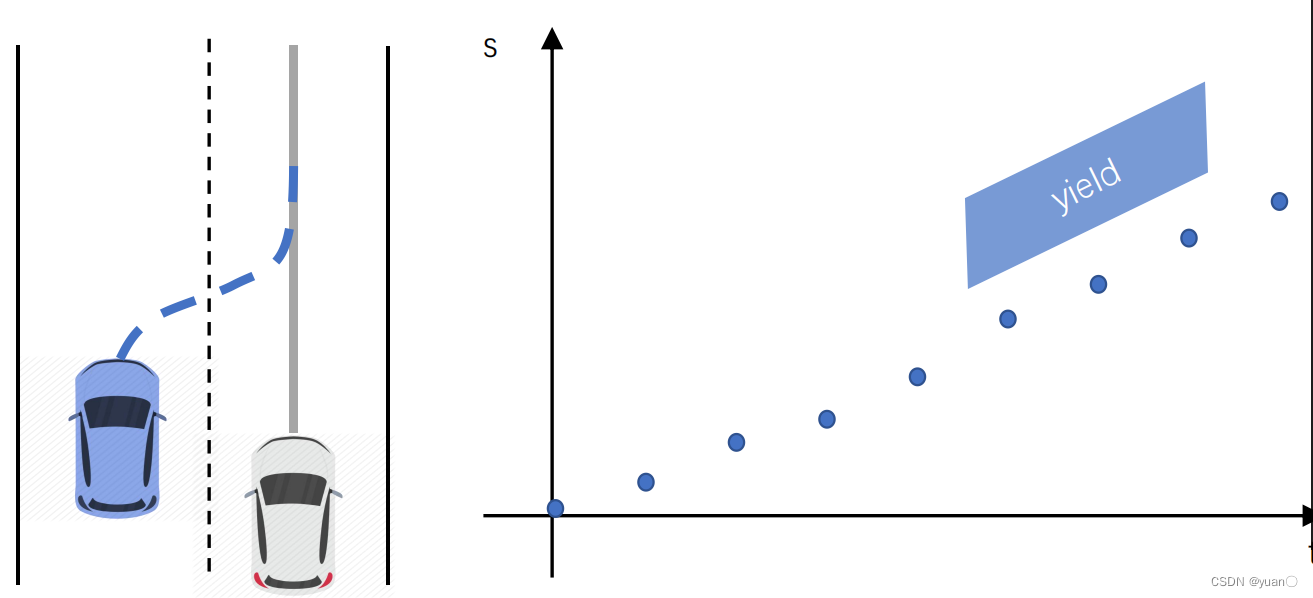
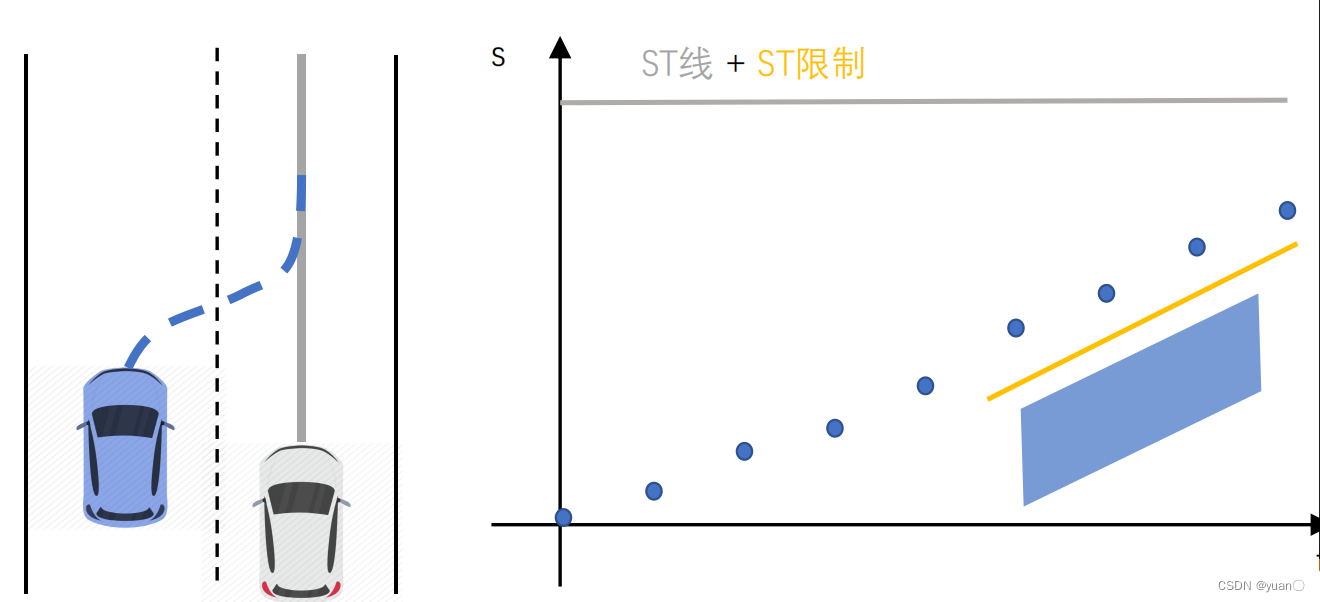
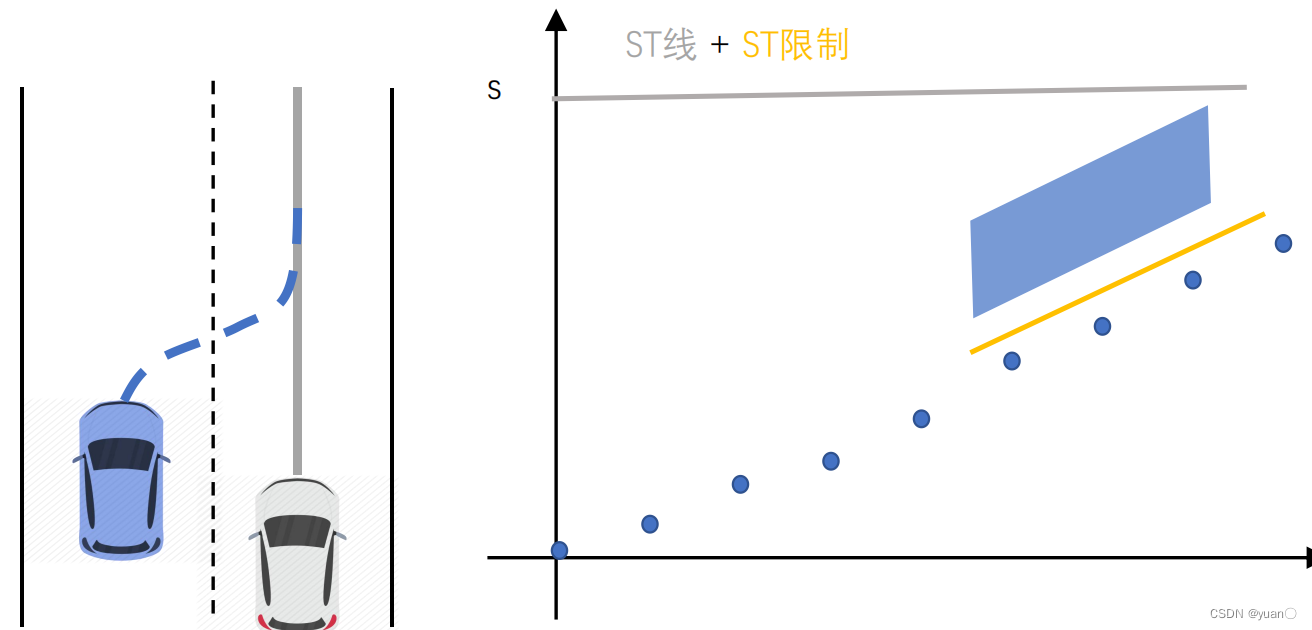
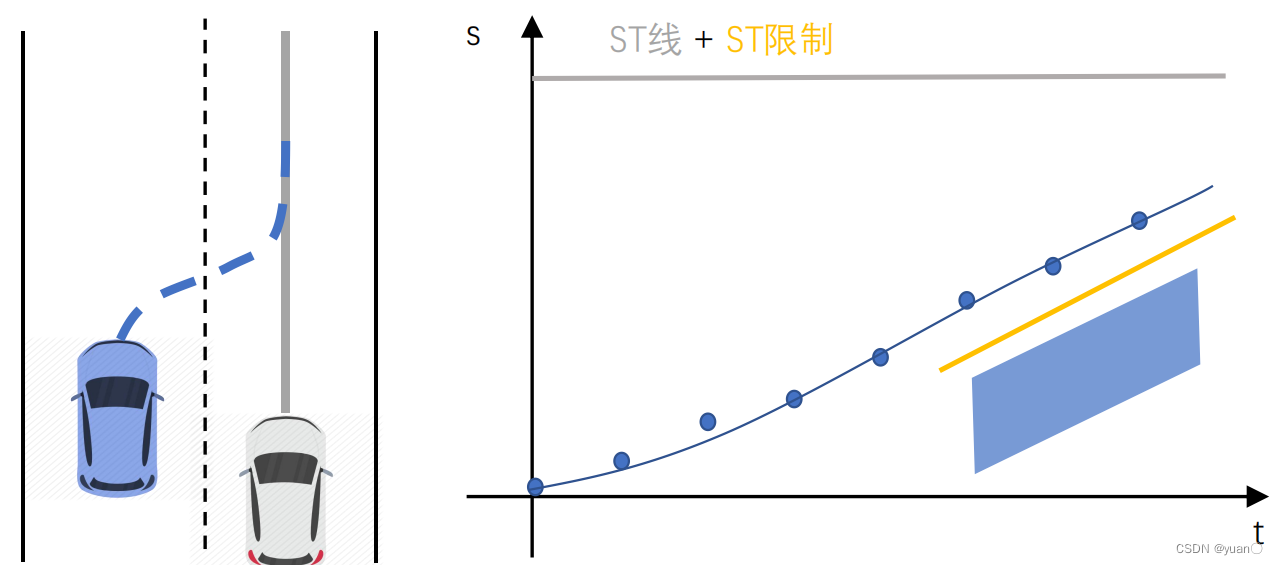
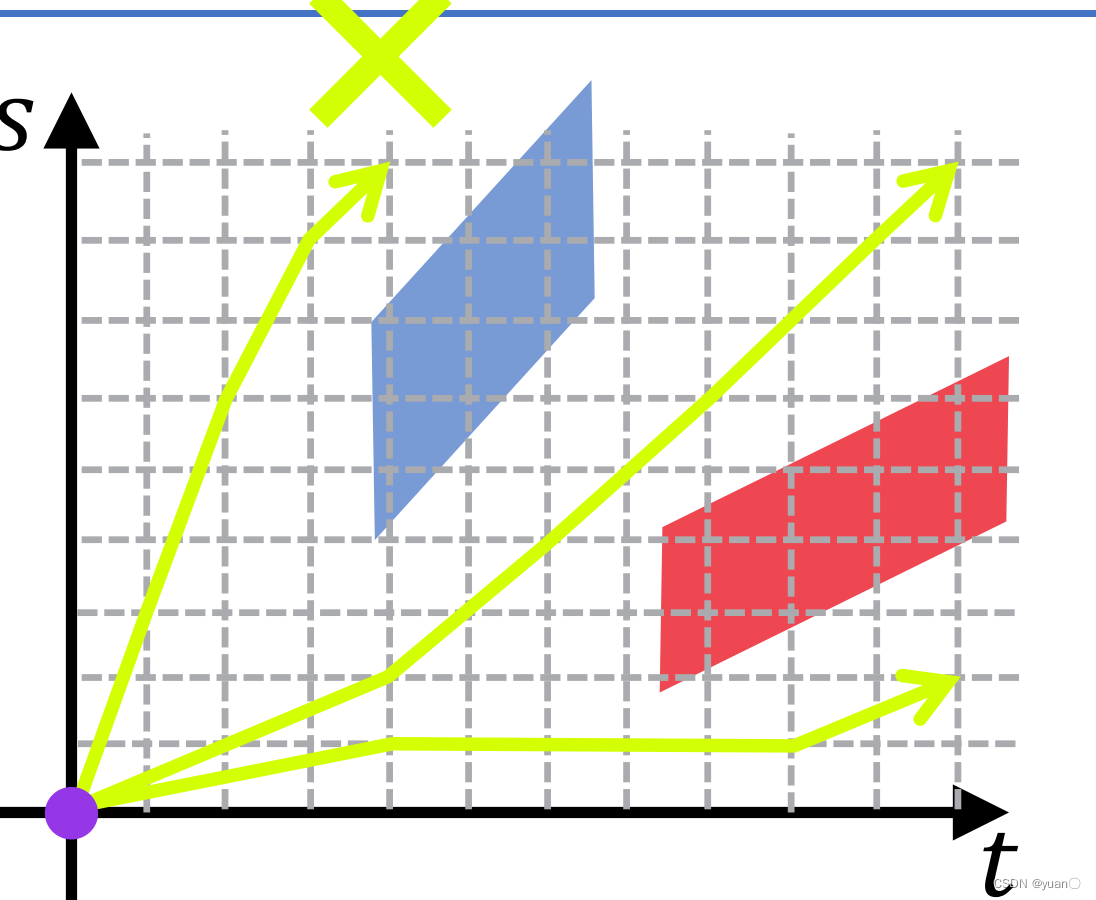
1.2.3 主车跟随前车行驶
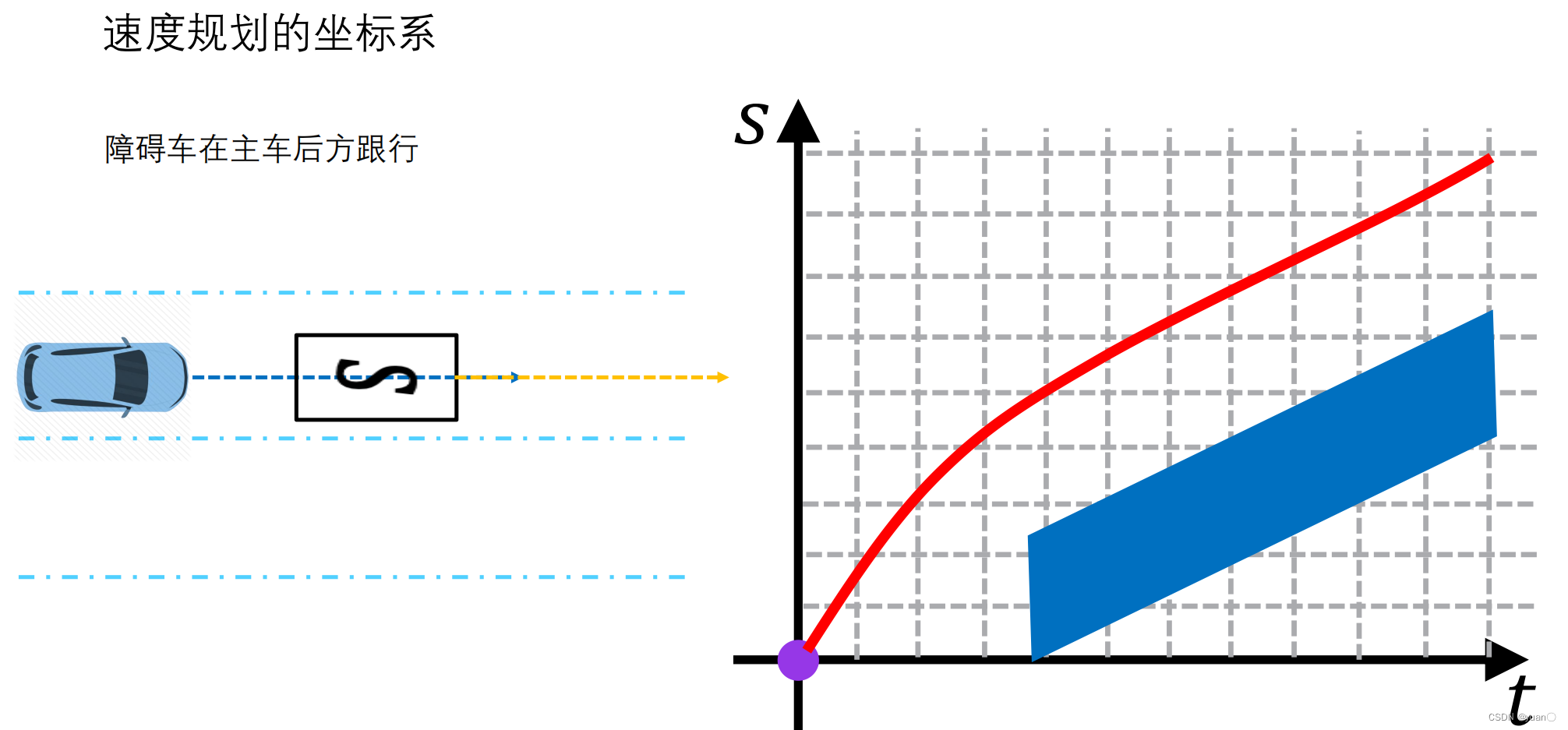
ps:蓝色四边形为障碍车在ST图下的投影。长边的斜率代表车速,短边代表障碍车在主车规划出的路径中占据的长度。
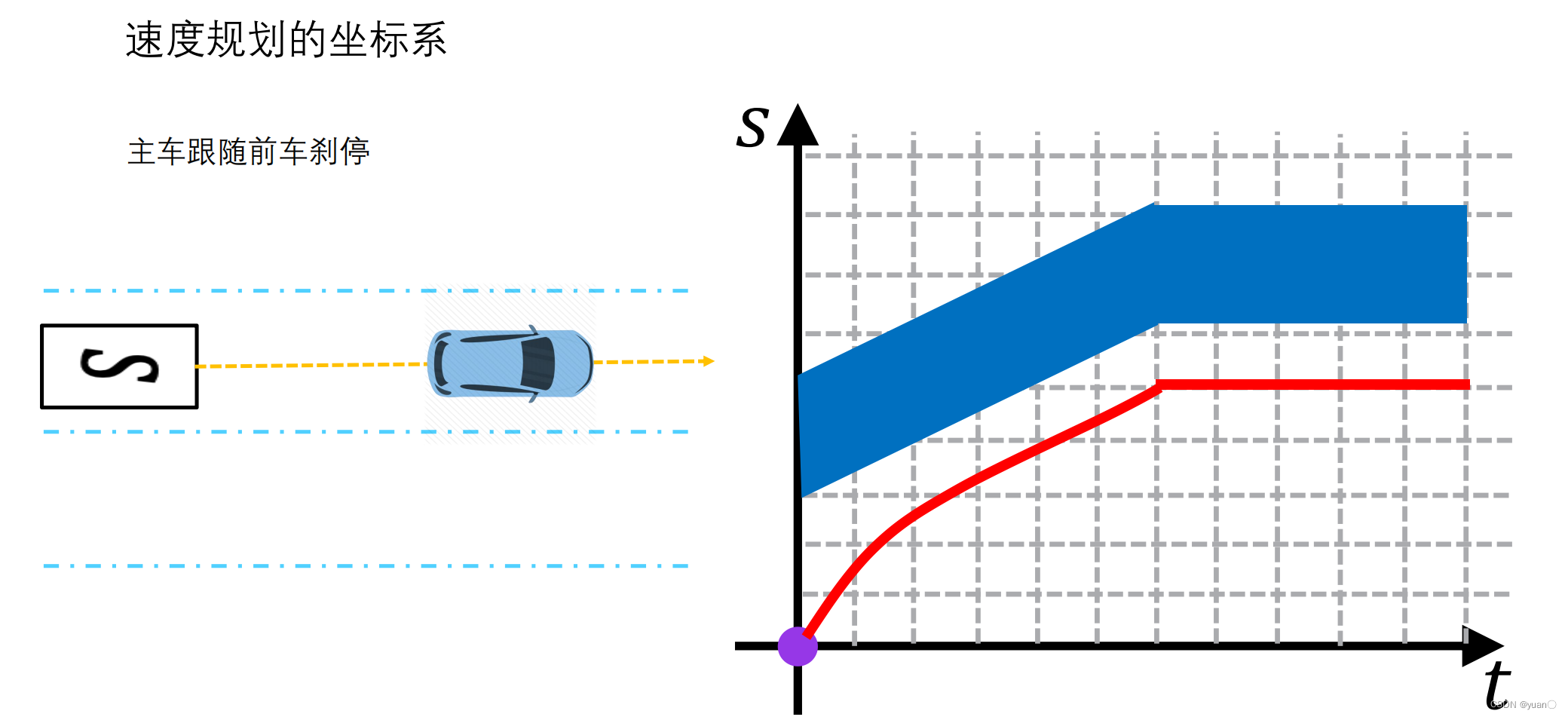
1.2.4 主车跟随前车刹停
1.2.5 障碍车在主车后方跟行
1.3 速度规划算法整体流程
路径规划的配置文件在lane_follow_config.pb.txt中
// /home/yuan/apollo-edu/modules/planning/conf/scenario/lane_follow_config.pb.txt
scenario_type: LANE_FOLLOW
stage_type: LANE_FOLLOW_DEFAULT_STAGE
stage_config: {
//路径规划
stage_type: LANE_FOLLOW_DEFAULT_STAGE
enabled: true
task_type: LANE_CHANGE_DECIDER
task_type: PATH_REUSE_DECIDER
task_type: PATH_LANE_BORROW_DECIDER
task_type: PATH_BOUNDS_DECIDER
task_type: PIECEWISE_JERK_PATH_OPTIMIZER
task_type: PATH_ASSESSMENT_DECIDER
task_type: PATH_DECIDER
task_type: RULE_BASED_STOP_DECIDER
//速度规划
task_type: SPEED_BOUNDS_PRIORI_DECIDER
task_type: SPEED_HEURISTIC_OPTIMIZER
task_type: SPEED_DECIDER
task_type: SPEED_BOUNDS_FINAL_DECIDER
task_type: PIECEWISE_JERK_SPEED_OPTIMIZER
# task_type: PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER
task_type: RSS_DECIDER
_DECIDER结尾的为决策部分 _OPTIMIZER结尾的为优化部分。
1.3.1 Task: SPEED_BOUNDS_PRIORI_DECIDER
产生速度可行驶边界
所形成的区域是非凸的,不能用之前凸优化的方法去做,需要用动态规划的方法去做。
1.3.2 Task:SPEED_HEURISTIC_OPTIMIZER
动态规划规划目标
- 加速度尽可能小
- 离障碍物纵向距离尽可能远
- 满足车辆加减速度要求
- 满足限速要求
产生粗糙速度规划曲线
1.3.3 Task: SPEED_DECIDER
产生速度决策
1.3.4 Task: SPEED_BOUNDS_FINAL_DECIDER
产生速度规划边界
1.3.5 Task: PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER && PIECEWISE_JERK_SPEED_OPTIMIZER
产生平滑速度规划曲线
PIECEWISE_JERK_SPEED_OPTIMIZER 基于二次规划的速度规划
PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER 基于非线性规划的速度规划
两者二选一即可
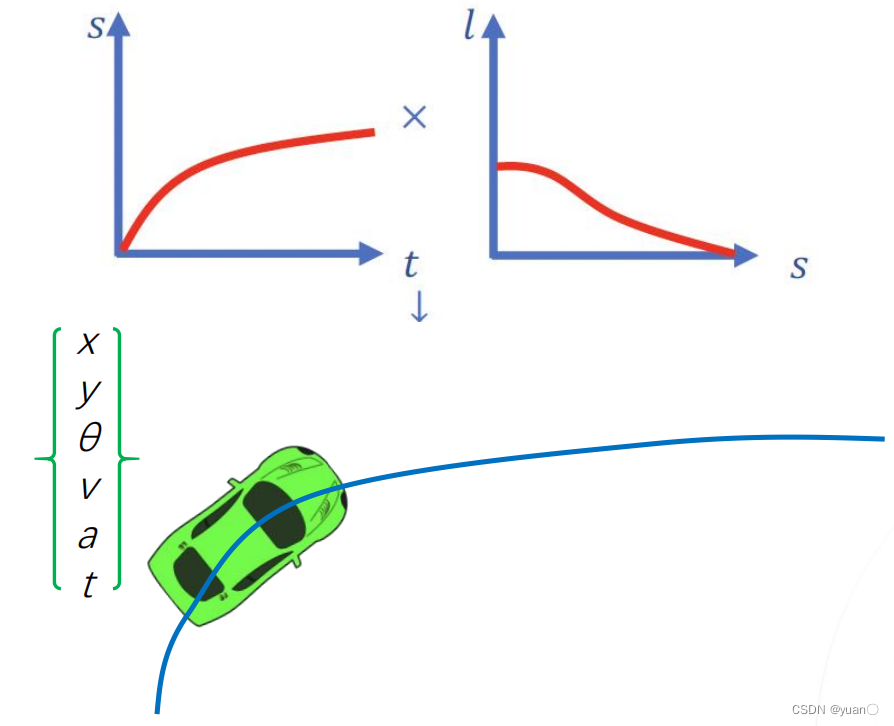
1.3.6 Stage: CombinePathAndSpeedProfile
将SL曲线、ST曲线合成为完整轨迹,之后作为Planning的输出。
2. 基于动态规划的速度规划
2.1 动态规划
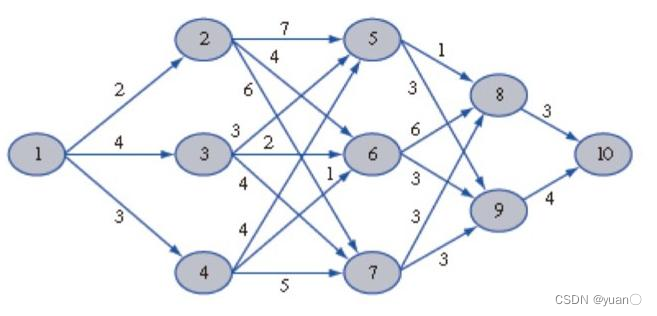
动态规划——通过把原问题分解为相对简单的子问题,再根据子问题的解来求解出原问题解的方法
状态转移方程
f
(
P
)
=
min
{
f
(
R
)
+
w
R
→
P
}
f(P) = \min \{ f(R) + {w_{R \to P}}\}
f(P)=min{f(R)+wR→P}
2.2 基于动态规划的速度规划
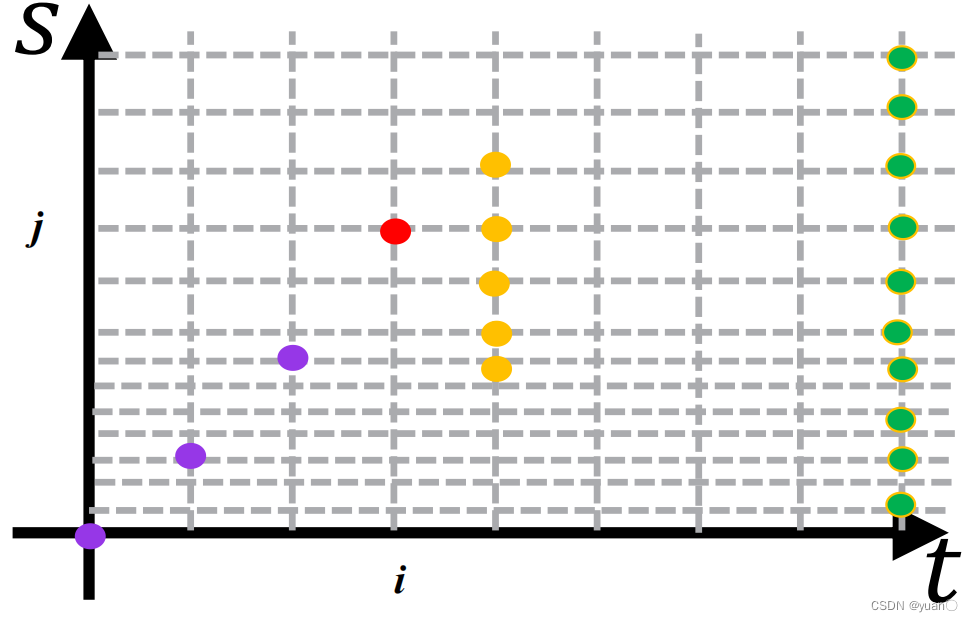
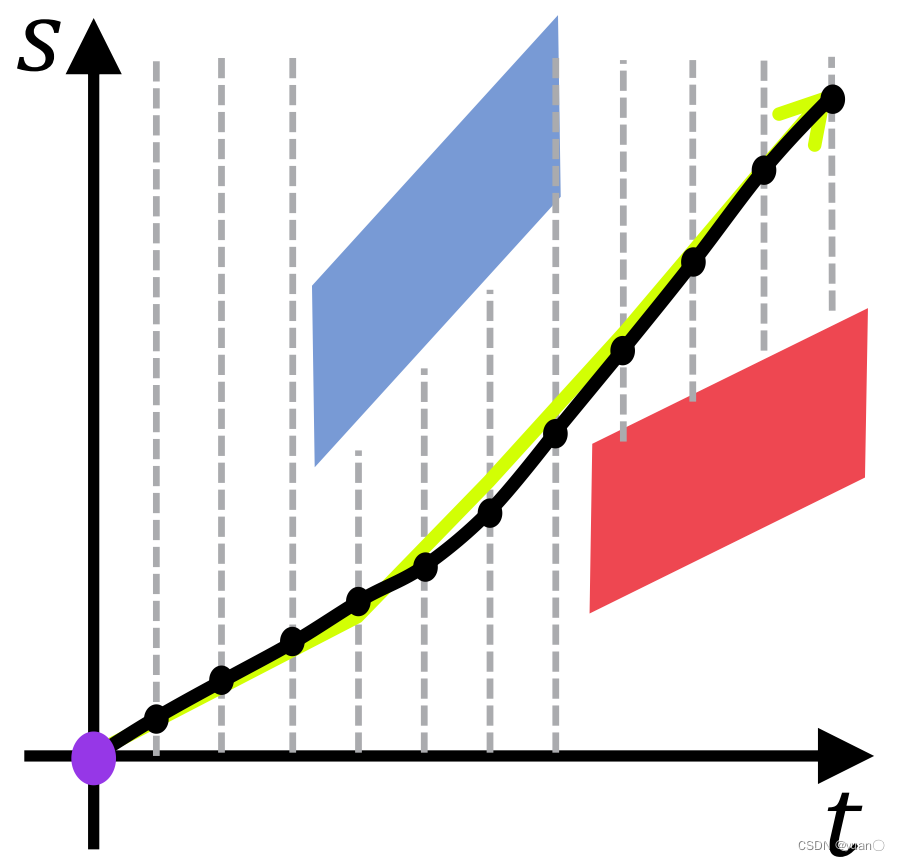
基于动态规划的速度规划的流程如下:
1.对路程和时间进行采样
2.搜索出粗略的可行路线
3.选出代价最小的一条
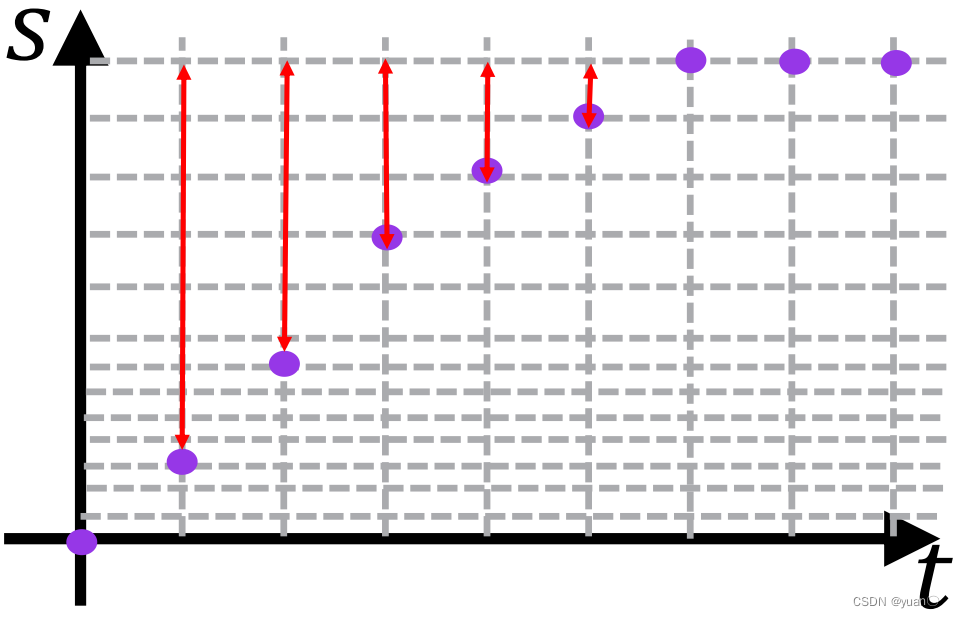
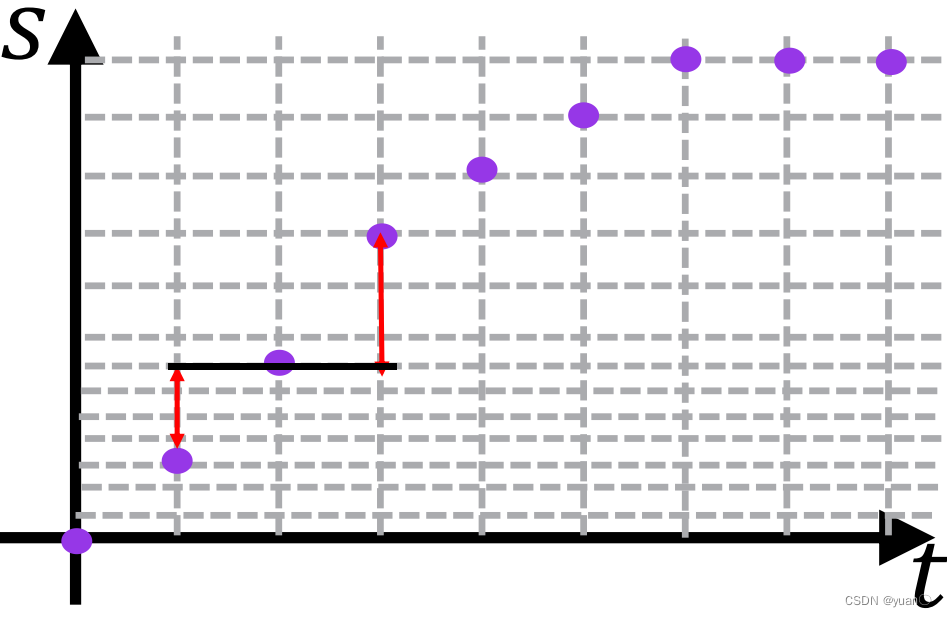
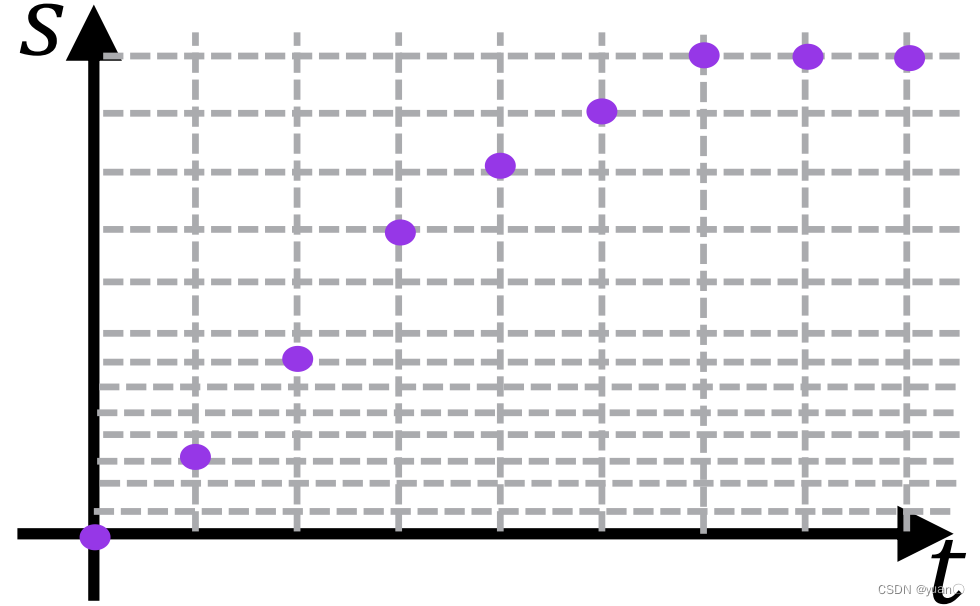
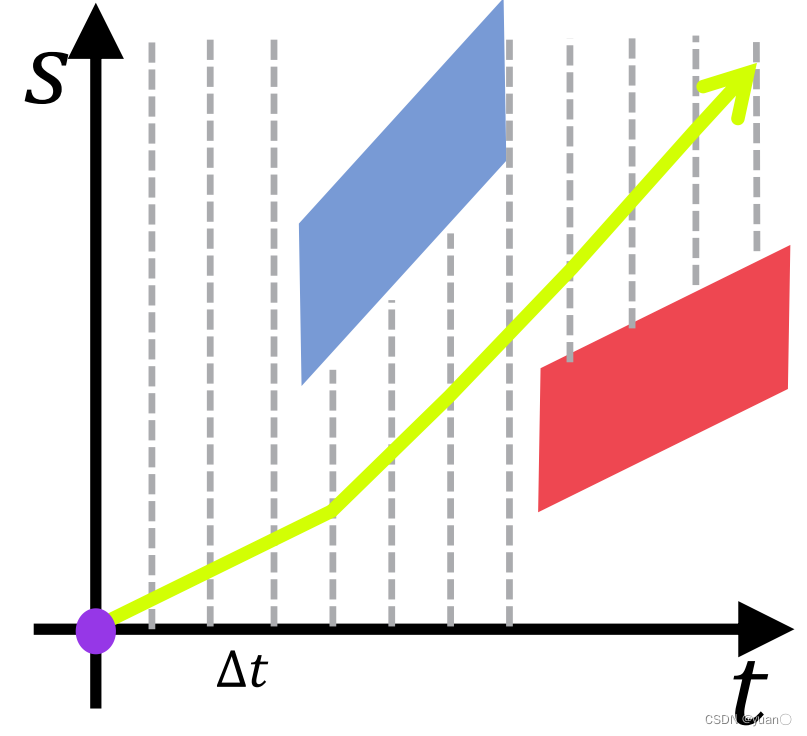
2.2.1 对路程和时间进行采样
速度规划在ST图进行采样,在
t
t
t的方向上以固定的间隔进行采样,在
s
s
s方向上以先密后疏的方式进行采样(离主车越近,所需规划的精度就需更高;离主车越远,牺牲采样精度,提升采样效率)
// 时间采样的一般参数设置
unit_t: 1.0 //采样时间
dense_dimension_s: 101 // 采样密集区域的点数
dense_unit_s: 0.1 //采样密集区域的间隔
sparse_unit_s: 1.0 //采样系数区域的间隔
2.2.2 设计状态转移方程
2.2.2.1 障碍物cost计算
S_safe_overtake超车的安全距离
S_safe_follow跟车的安全距离
在设计状态转移方程时,要求不能与障碍物发生碰撞以及和障碍物不发生碰撞。于是可以得到以下方程:
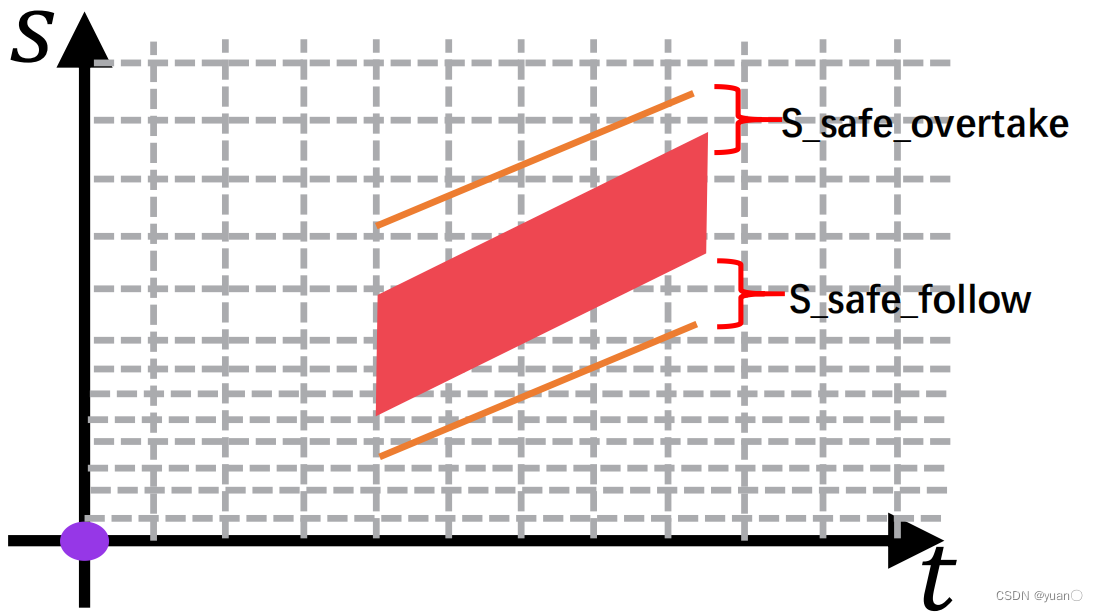

如果在障碍物距离之内,则cost设为无穷;如果在安全距离之外,则cost设为0;如果在安全距离与障碍物之间,则按按之间的距离计算。
2.2.2.2 距离cost计算
目的是更快的到达目的地
C
s
p
a
t
i
a
l
=
w
s
p
a
t
i
a
l
(
s
t
o
t
a
l
−
s
(
j
)
)
{C_{spatial}} = {w_{spatial}}({s_{total}} - s(j))
Cspatial=wspatial(stotal−s(j))
w
s
p
a
t
i
a
l
{w_{spatial}}
wspatial为损失权值
(
s
t
o
t
a
l
−
s
(
j
)
)
({s_{total}} - s(j))
(stotal−s(j))当前点到目标点的差值。
2.2.2.3 状态转移cost计算
状态转移cost计算分为三个部分:
C
e
d
g
e
=
C
s
p
e
e
d
+
C
a
c
c
+
C
j
e
r
k
{C_{edge}} = {C_{speed}} + {C_{acc}} + {C_{jerk}}
Cedge=Cspeed+Cacc+Cjerk
C
s
p
e
e
d
{C_{speed}}
Cspeed——速度代价
C
a
c
c
{C_{acc}}
Cacc——加速度代价
C
j
e
r
k
{C_{jerk}}
Cjerk——加加速度代价
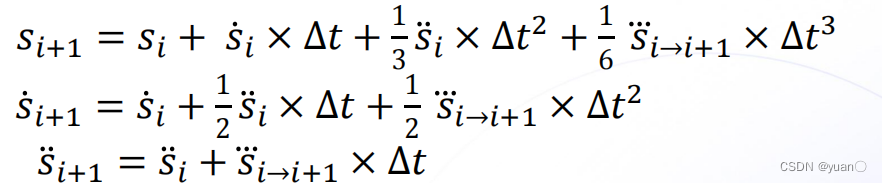
节点间速度为:
v
=
s
(
j
+
k
)
−
s
(
j
)
Δ
t
v = \frac{{s(j + k) - s(j)}}{{\Delta t}}
v=Δts(j+k)−s(j)
限速比率:
v
det
=
v
−
v
l
i
m
i
t
v
l
i
m
i
t
{v_{\det }} = \frac{{v - {v_{limit}}}}{{{v_{limit}}}}
vdet=vlimitv−vlimit
C
s
p
e
e
d
{C_{speed}}
Cspeed速度代价的计算如下:

加速度的计算如下:
a
(
i
+
1
,
j
+
k
)
=
s
(
k
+
j
)
−
s
(
j
)
Δ
t
−
s
(
j
)
−
s
(
l
)
Δ
t
Δ
t
a(i + 1,j + k) = \frac{{\frac{{s(k + j) - s(j)}}{{\Delta t}} - \frac{{s(j) - s(l)}}{{\Delta t}}}}{{\Delta t}}
a(i+1,j+k)=ΔtΔts(k+j)−s(j)−Δts(j)−s(l)
C
a
c
c
{C_{acc}}
Cacc加速度代价的计算如下:
加加速度超过设定边界,设为无穷;若在之间,则按二次方的方式进行计算。加加速度越小越好。

最后是总的代价:
在每次迭代时会将总的代价与当前节点的代价进行比较,取最小的一个,进行更新。
3. 基于二次规划的速度规划
动态规划得到的轨迹还比较粗糙,需要用优化的方法对轨迹进行进一步的平滑。基于二次规划的速度规划的方法与路径规划基本一致。
- 确定优化变量
- 设计目标函数
- 设计约束
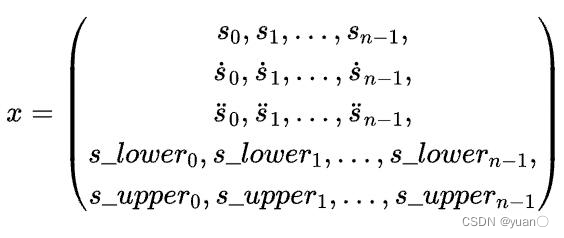
3.1 确定优化变量

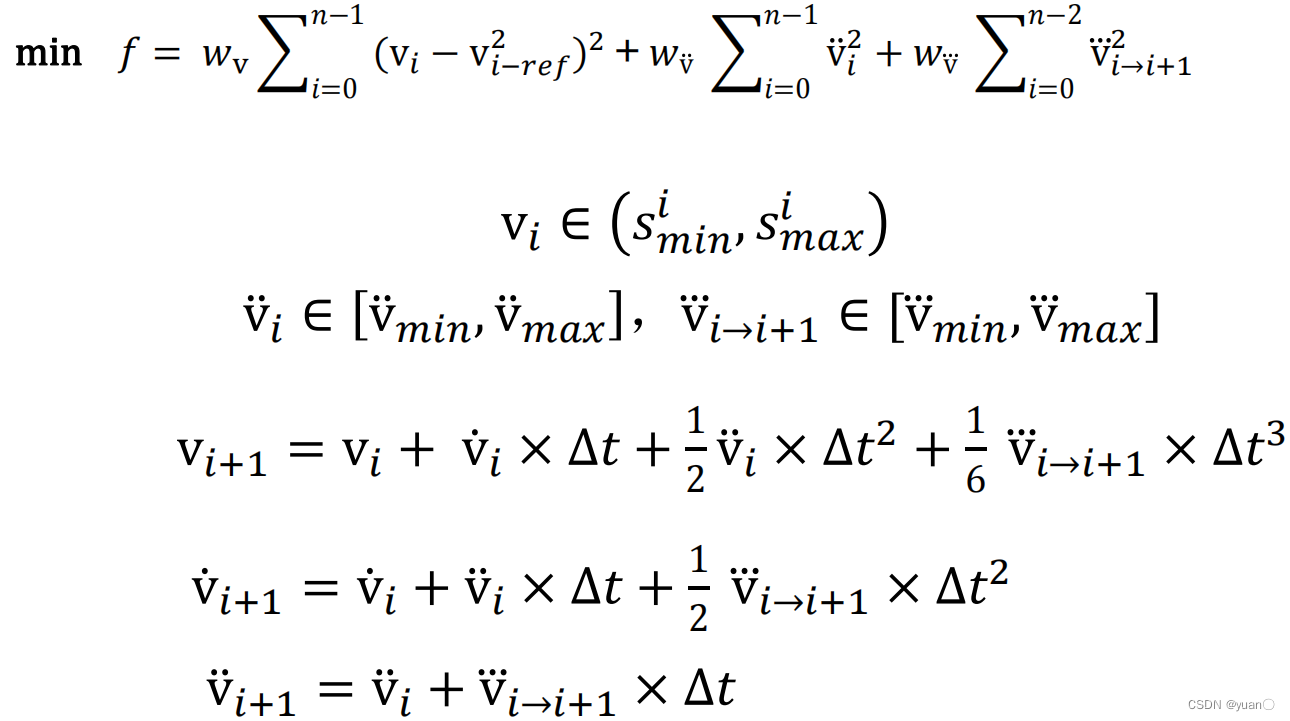
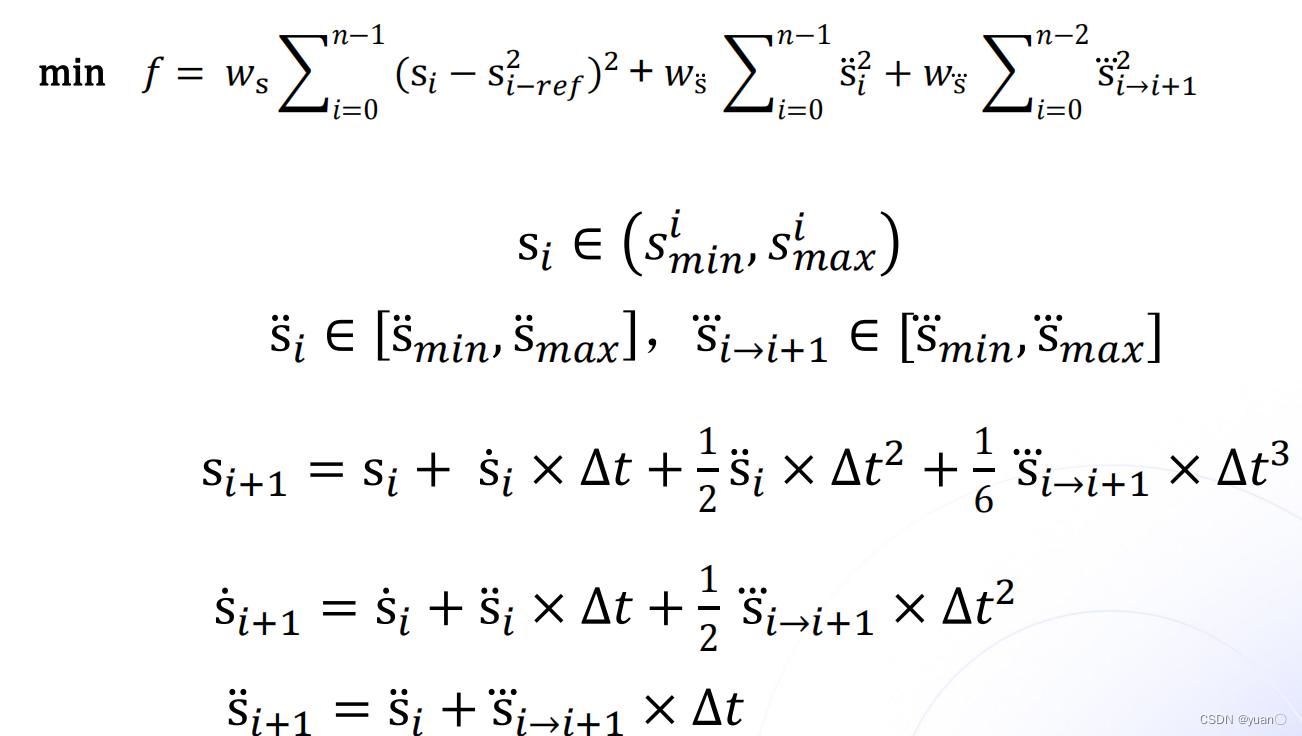
3.2 设计目标函数
对于目标函数的设计,我们需要明确以下目标:
- 尽可能贴合决策时制定的st曲线: ∣ s i − s i − r e f ∣ ↓ \left| {{s_i} - {s_{i - ref}}} \right| \downarrow ∣si−si−ref∣↓
- 确保舒适的体感,尽可能降低加速度/加加速度: ∣ s ¨ i + 1 ∣ ↓ \left| {{{\ddot s}_{i + 1}}} \right| \downarrow ∣s¨i+1∣↓, ∣ s ′ ′ ′ i → i + 1 ∣ ↓ \left| {{{s'''}_{i \to i + 1}}} \right| \downarrow ∣s′′′i→i+1∣↓
- 尽可能按照巡航速度行驶: ∣ s ˙ i − v r e f ∣ ↓ \left| {{{\dot s}_i} - {v_{ref}}} \right| \downarrow ∣s˙i−vref∣↓
- 在转弯时减速行驶, 曲率越大,速度越小: ∣ p i s ˙ i ∣ ↓ \left| {{p_i}{{\dot s}_i}} \right| \downarrow ∣pis˙i∣↓
最后会得到以下目标函数:

w
s
w_s
ws——位置的权重
w
v
w_v
wv——速度的权重
p
i
p_i
pi——曲率的权重
w
a
w_a
wa——加速度的权重
w
j
w_j
wj——加加速度的权重
3.3 要满足的约束条件
接下来谈谈约束的设计。
要满足的约束条件:
• 主车必须在道路边界内,同时不能和障碍物有碰撞
s
i
∈
(
s
min
i
,
s
max
i
)
{s_i} \in (s_{\min }^i,s_{\max }^i)
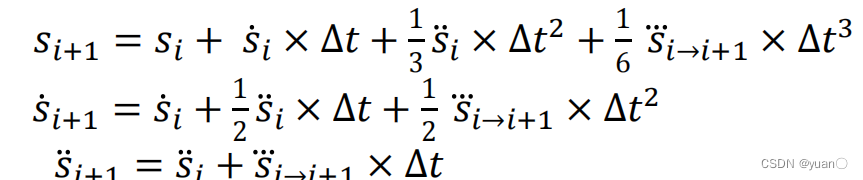
si∈(smini,smaxi)• 根据当前状态,主车的横向速度/加速度/加加速度有特定运动学限制:•必须满足基本的物理原理:
•起始点约束:;
s
0
=
s
i
n
i
t
s_0=s_{init}
s0=sinit,
s
˙
0
=
s
i
n
i
t
\dot s_0=s_{init}
s˙0=sinit,
s
¨
0
=
s
i
n
i
t
\ddot s_0=s_{init}
s¨0=sinit满足的是起点的约束,即为实际车辆规划起点的状态。
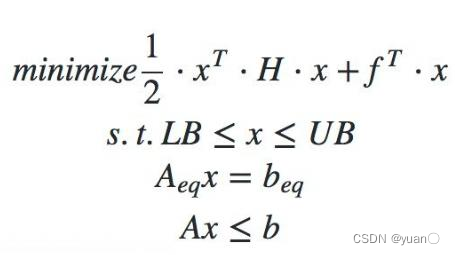
3.4 转化为二次规划问题求解
4. 基于非线性规划的速度规划
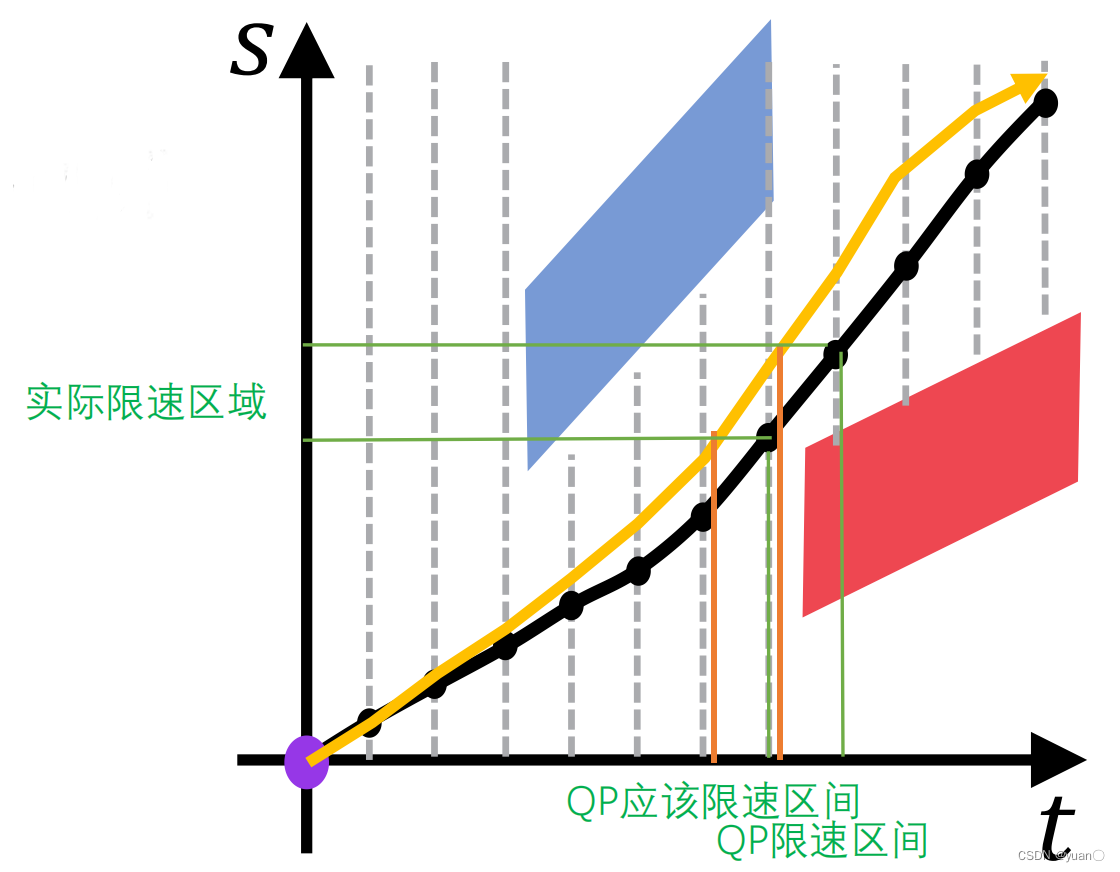
为了使得限速更加精细,Apollo提出了一种基于非线性规划的速度规划方法。
4.1 二次规划速度规划算法的问题

4.2 确定优化变量
基于非线性规划的速度规划步骤与之前规划步骤基本一致。
4.3 定义目标函数

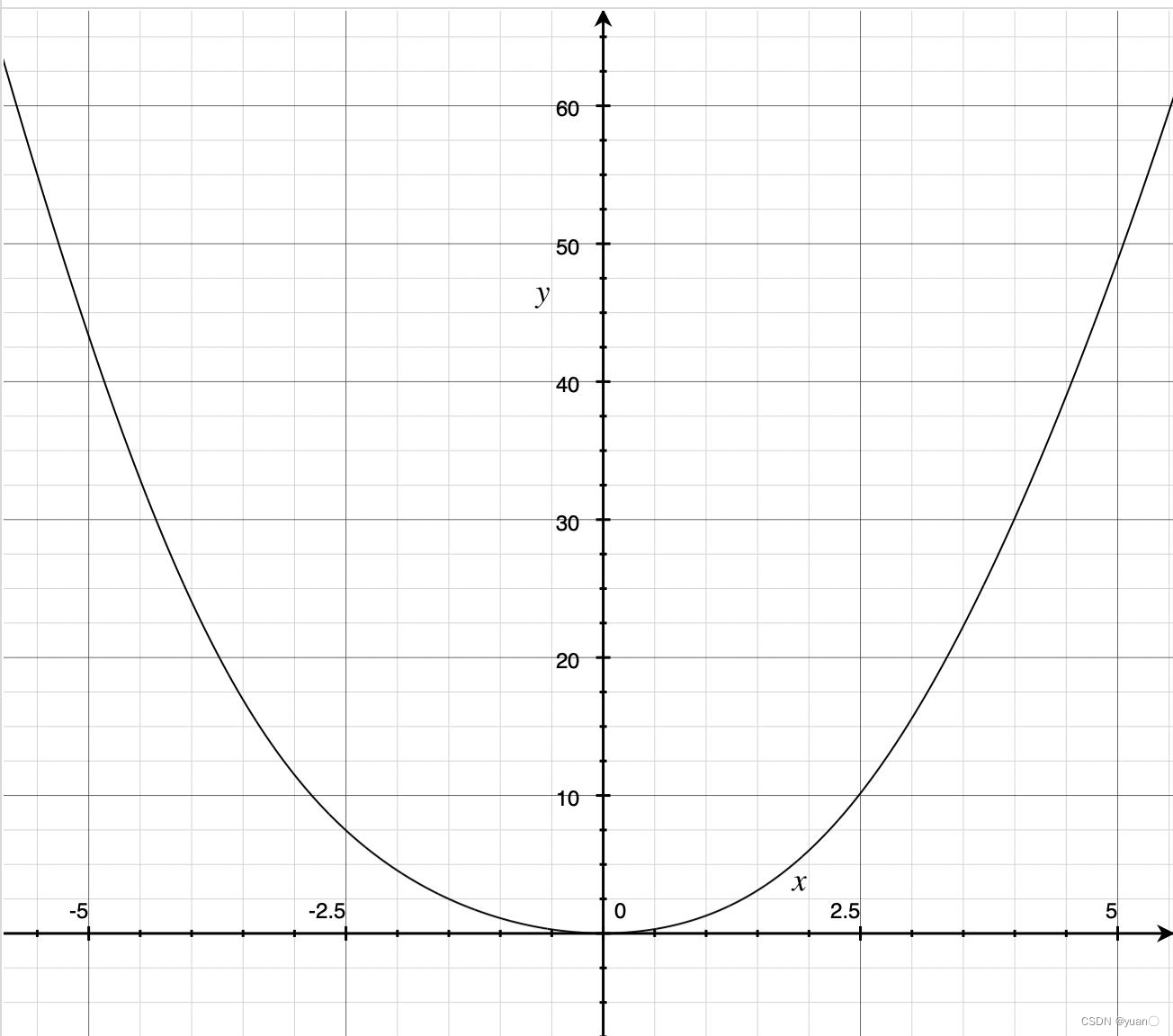
横向加速度的计算方式:
曲率是关于
s
s
s的关系式,所以要进行平滑,对于非线性规划的求解器,无论是目标函数还是约束函数,都需要满足二阶可导:
κ
′
=
f
′
′
(
s
)
\kappa ' = f''(s)
κ′=f′′(s)
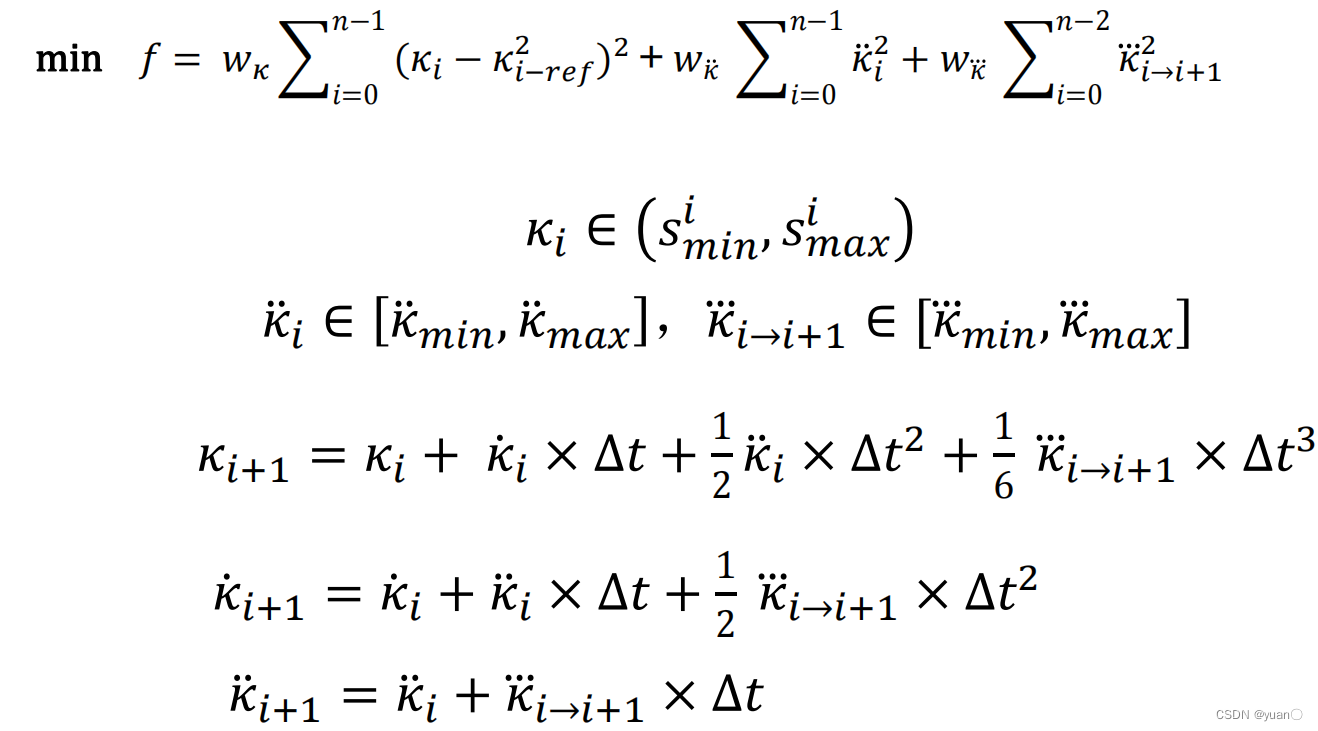
4.4 定义约束
接下来是约束条件:
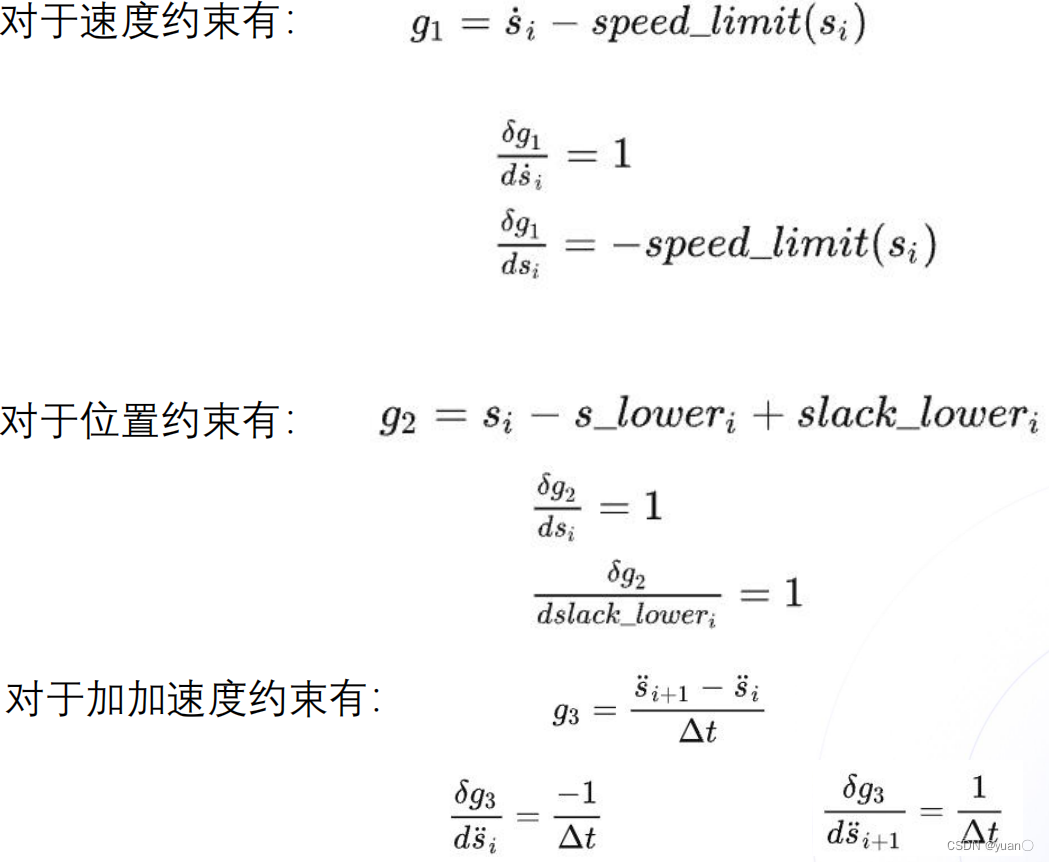
- 规划的速度要一直往前走: s i ≤ s i + 1 {s_i} \le {s_{i + 1}} si≤si+1
- 加加速度不能超过定义的极限值: j e r k min ≤ s ¨ i + 1 − s ¨ i Δ t ≤ j e r k max jer{k_{\min }} \le \frac{{{{\ddot s}_{i{\rm{ + 1}}}} - {{\ddot s}_i}}}{{\Delta t}} \le jer{k_{\max }} jerkmin≤Δts¨i+1−s¨i≤jerkmax
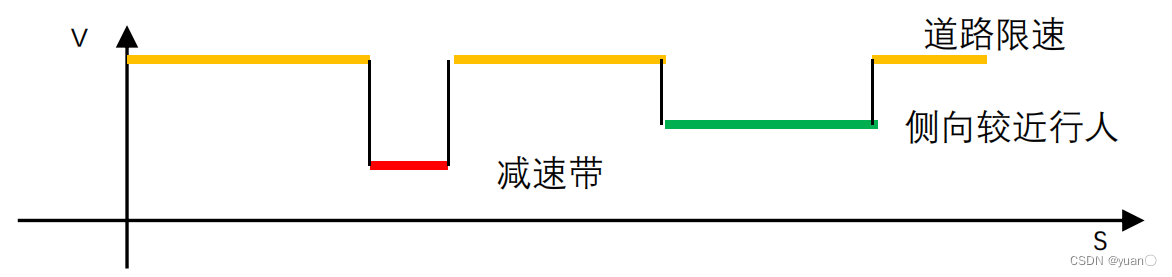
- 速度满足路径上的限速: s ˙ i ≤ s p e e d _ l i m i t ( s i ) {\dot s_i} \le speed\_limit({s_i}) s˙i≤speed_limit(si)
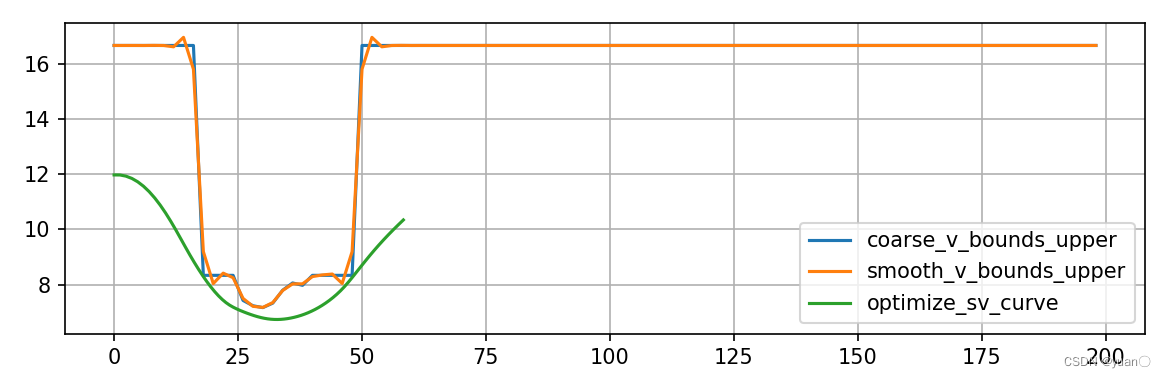
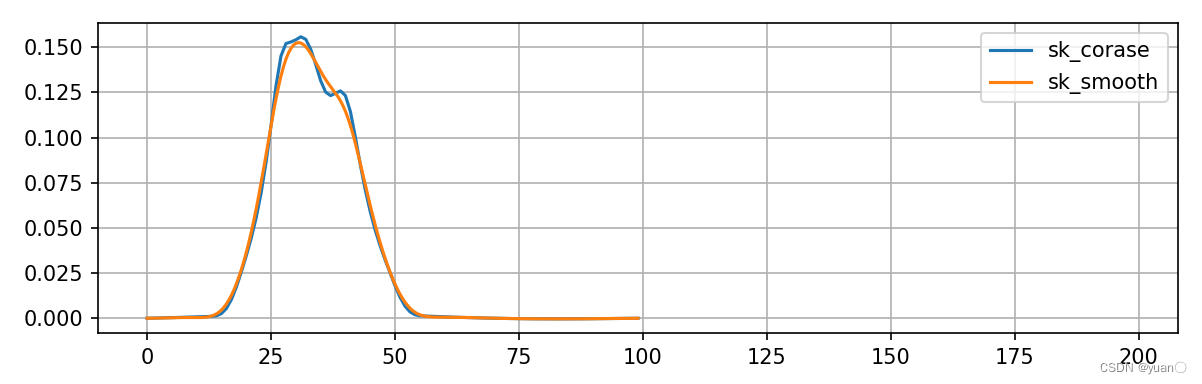
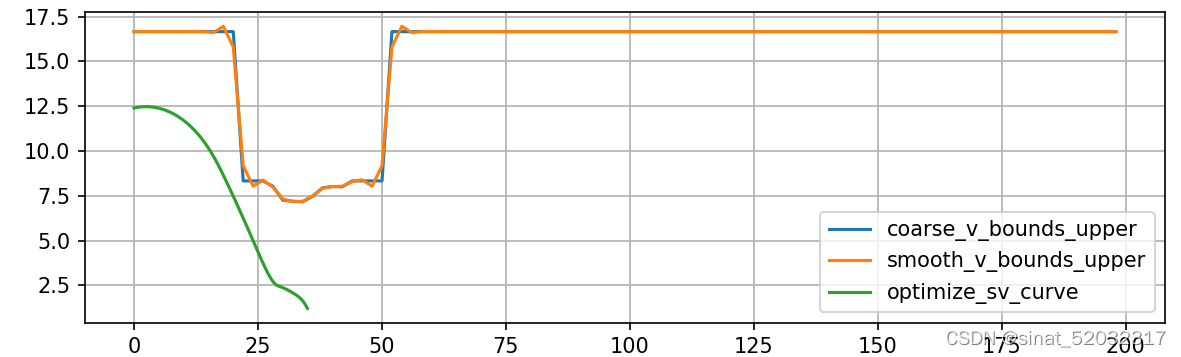
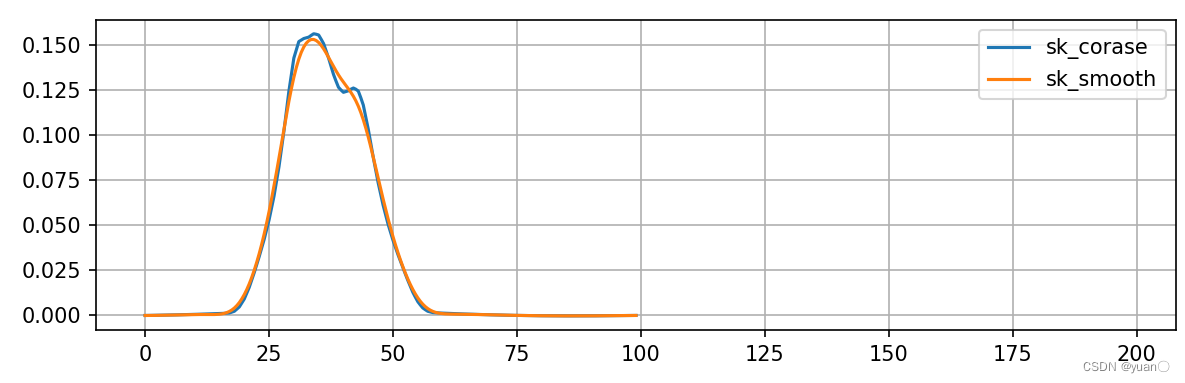
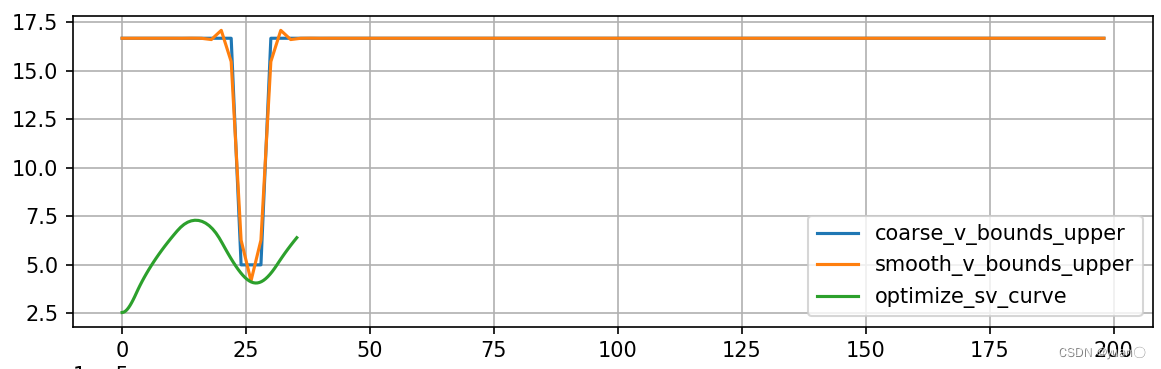
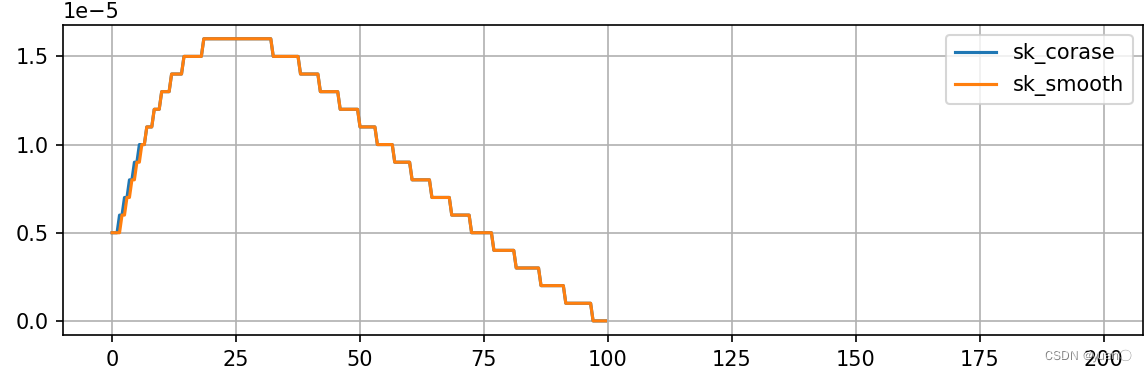
限速的函数并非直接可以得到,接下来看看限速函数是怎么来的。
限速的来源如下图所示: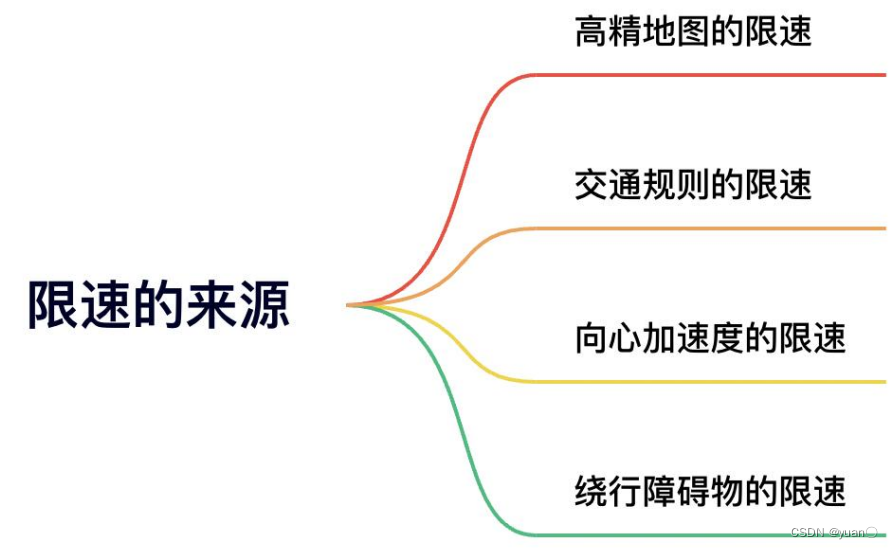
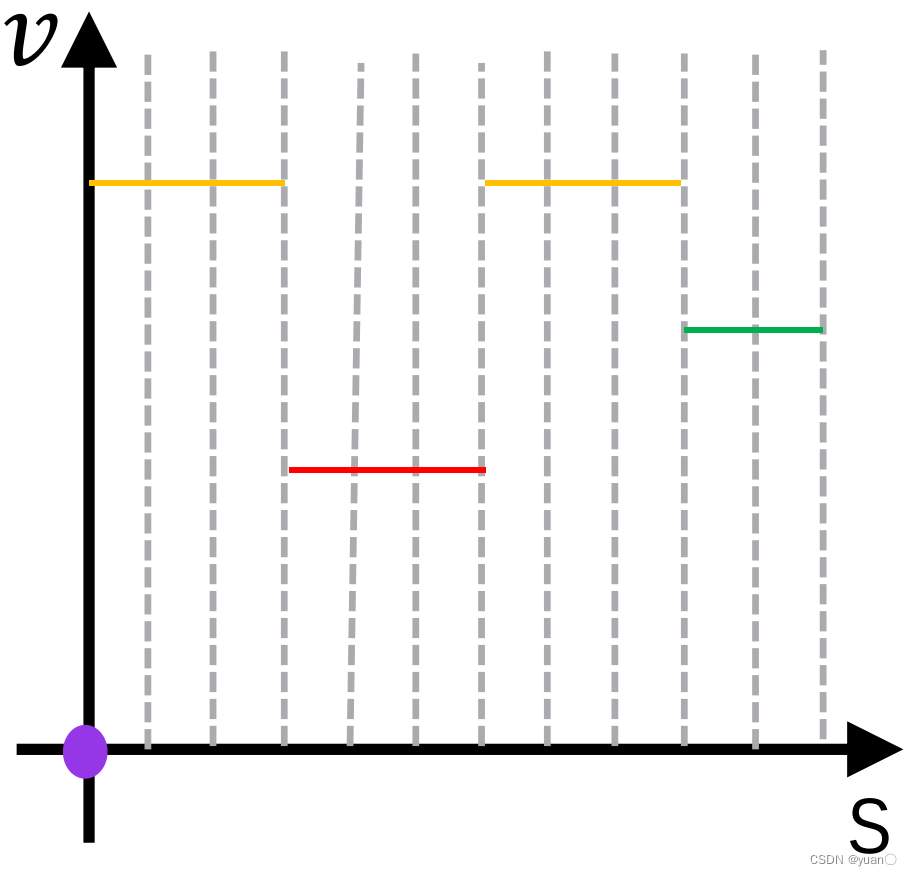
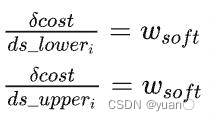
再回到约束中,为了避免求解的失败,二次规划中对位置的硬约束,在非线性规划中转为了对位置的软约束。提升求解的精度。
4.5 求解器求解
最后代入Ipopt中进行非线性规划的求解。
Ipopt(Interior Point Optimizer)是一个用于大规模非线性优化的开源软件包。它可用于解决如下形式的非线性规划问题: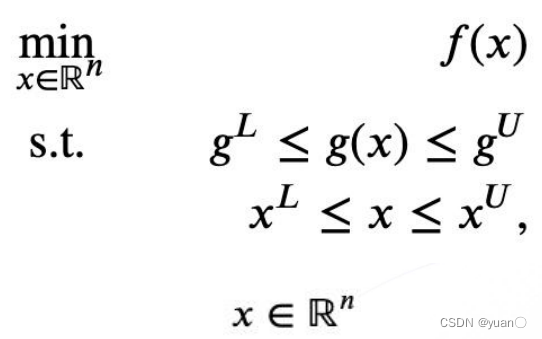
Ipopt的求解由以下几个函数构成:
1.get_nlp_info()定义问题规模
/** Method to return some info about the nlp */
bool get_nlp_info(int &n, int &m, int &nnz_jac_g, int &nnz_h_lag,
IndexStyleEnum &index_style) override;
• 优化变量数量:n
• 约束函数数量:m
• 雅可比矩阵非0项数量:nnz_jac_g
• 黑塞矩阵非0项数量:nnz_h_lag
2.get_bounds_info()定义约束边界约束
/** Method to return the bounds for my problem */
bool get_bounds_info(int n, double *x_l, double *x_u, int m, double *g_l,
double *g_u) override;
• 自变量的下边界:x_l
• 自变量的上边界: x_u
• 约束函数下边界:g_l
• 约束函数的上边界:g_u
3.get_starting_point()定义初值
/** Method to return the starting point for the algorithm */
bool get_starting_point(int n, bool init_x, double *x, bool init_z,
double *z_L, double *z_U, int m, bool init_lambda,
double *lambda) override;
• 定义优化变量的初始值x
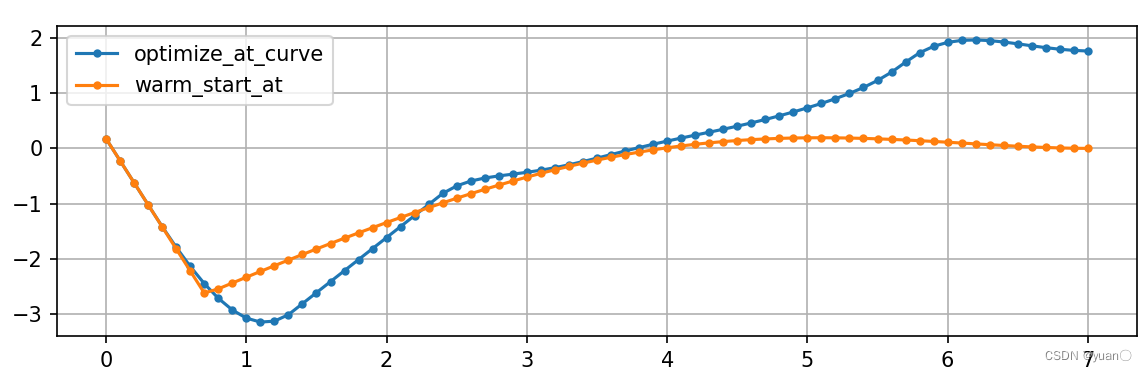
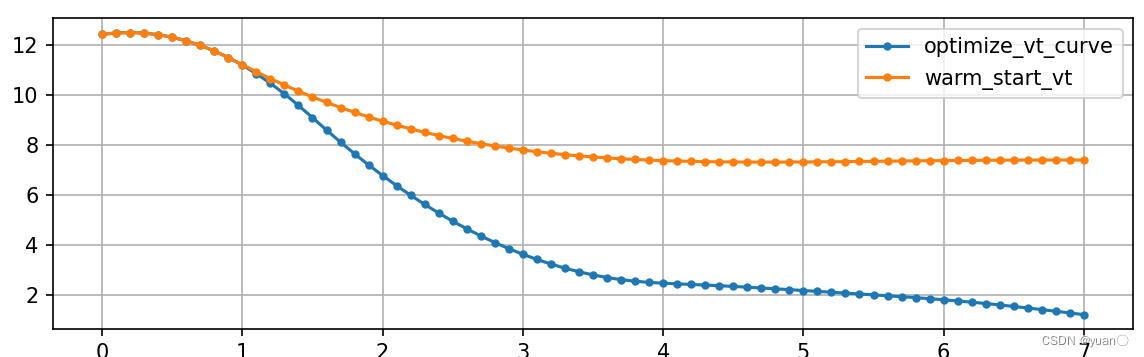
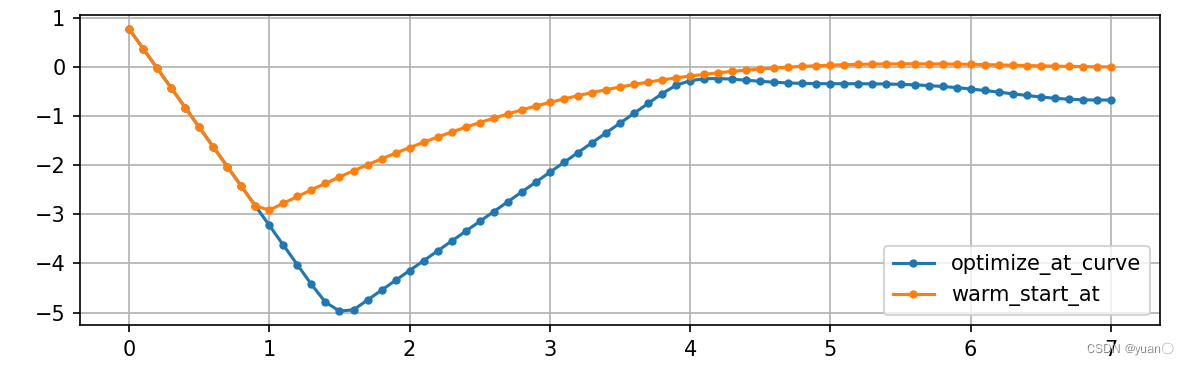
对于速度规划问题,如何计算初始解?
Apollo同样用分段多项式二次规划的求解方式,得到符号约束的速度平滑曲线,作为非线性规划的初值。
4.eval_f()求解目标函数
/** Method to return the objective value */
bool eval_f(int n, const double *x, bool new_x, double &obj_value) override;
• 变量值:x
• 目标函数值:obj_val
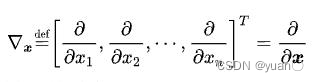
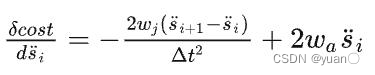
5.eval_grad_f()求解梯度
/** Method to return the gradient of the objective */
bool eval_grad_f(int n, const double *x, bool new_x, double *grad_f) override;
• 变量值:x
• 梯度值:grad_f
梯度的定义:
目标函数:偏导数:



6.eval_g()求解约束函数
/** Method to return the constraint residuals */
bool eval_g(int n, const double *x, bool new_x, int m, double *g) override;
• 变量值:x
• 约束函数值:g
7.eval_jac_g()求解约束雅可比矩阵
/** Method to return:
* 1) The structure of the jacobian (if "values" is nullptr)
* 2) The values of the jacobian (if "values" is not nullptr)
*/
bool eval_jac_g(int n, const double *x, bool new_x, int m, int nele_jac,
int *iRow, int *jCol, double *values) override;
• 变量值:x
• 雅可比矩阵非0元素数量:nele_jac
• 雅可比矩阵值:values
雅可比矩阵: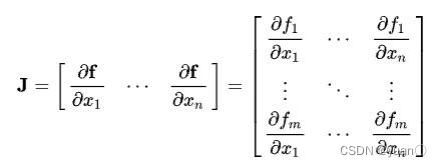
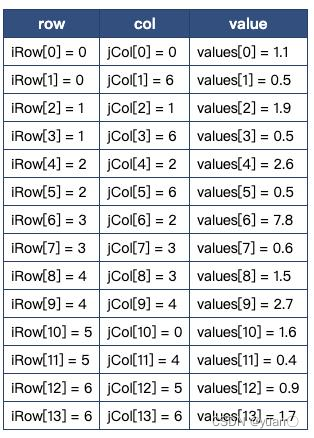
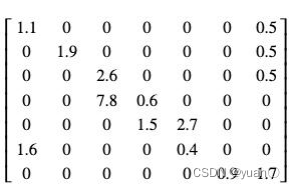
求解雅可比矩阵需要对约束函数进行求偏导:
微分关系等式约束:




8.eval_h()求解黑塞矩阵
/** Method to return:
* 1) The structure of the hessian of the lagrangian (if "values" is
* nullptr) 2) The values of the hessian of the lagrangian (if "values" is not
* nullptr)
*/
bool eval_h(int n, const double *x, bool new_x, double obj_factor, int m,
const double *lambda, bool new_lambda, int nele_hess, int *iRow,
int *jCol, double *values) override;
• 变量值:·x·
• 拉格朗日乘数:·lambda·
• 黑塞矩阵值:·values·
• 目标函数因数:·obj_factor·
黑塞矩阵: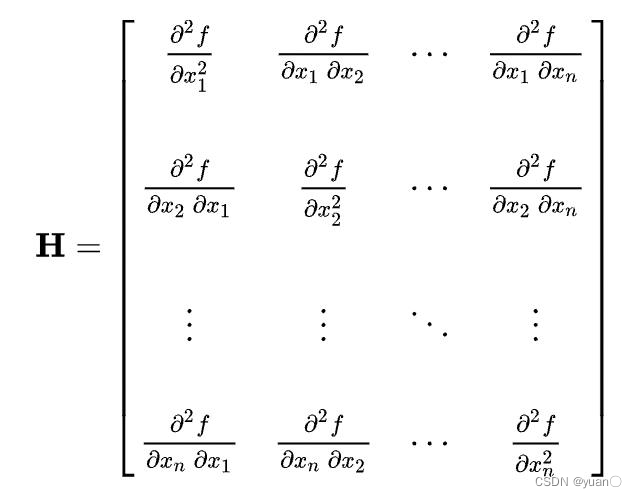

目标函数的二阶偏导数:
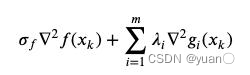
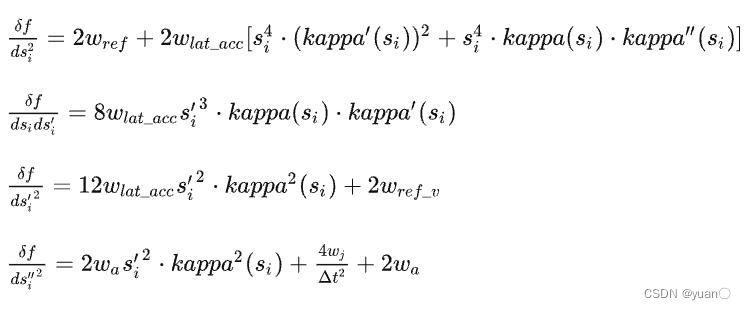
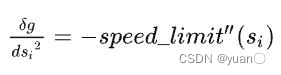
约束函数的二阶偏导数:
9. finalize_solution()
/** @name Solution Methods */
/** This method is called when the algorithm is complete so the TNLP can
* store/write the solution */
void finalize_solution(Ipopt::SolverReturn status, int n, const double *x,
const double *z_L, const double *z_U, int m,
const double *g, const double *lambda,
double obj_value, const Ipopt::IpoptData *ip_data,
Ipopt::IpoptCalculatedQuantities *ip_cq) override;
目标函数取得最小值时的优化量:x
目标函数最小值:obj_value
5. 速度规划算法实践
云实验地址——Apollo规划之速度规划仿真调试
1.启动DreamView
bash scripts/bootstrap.sh
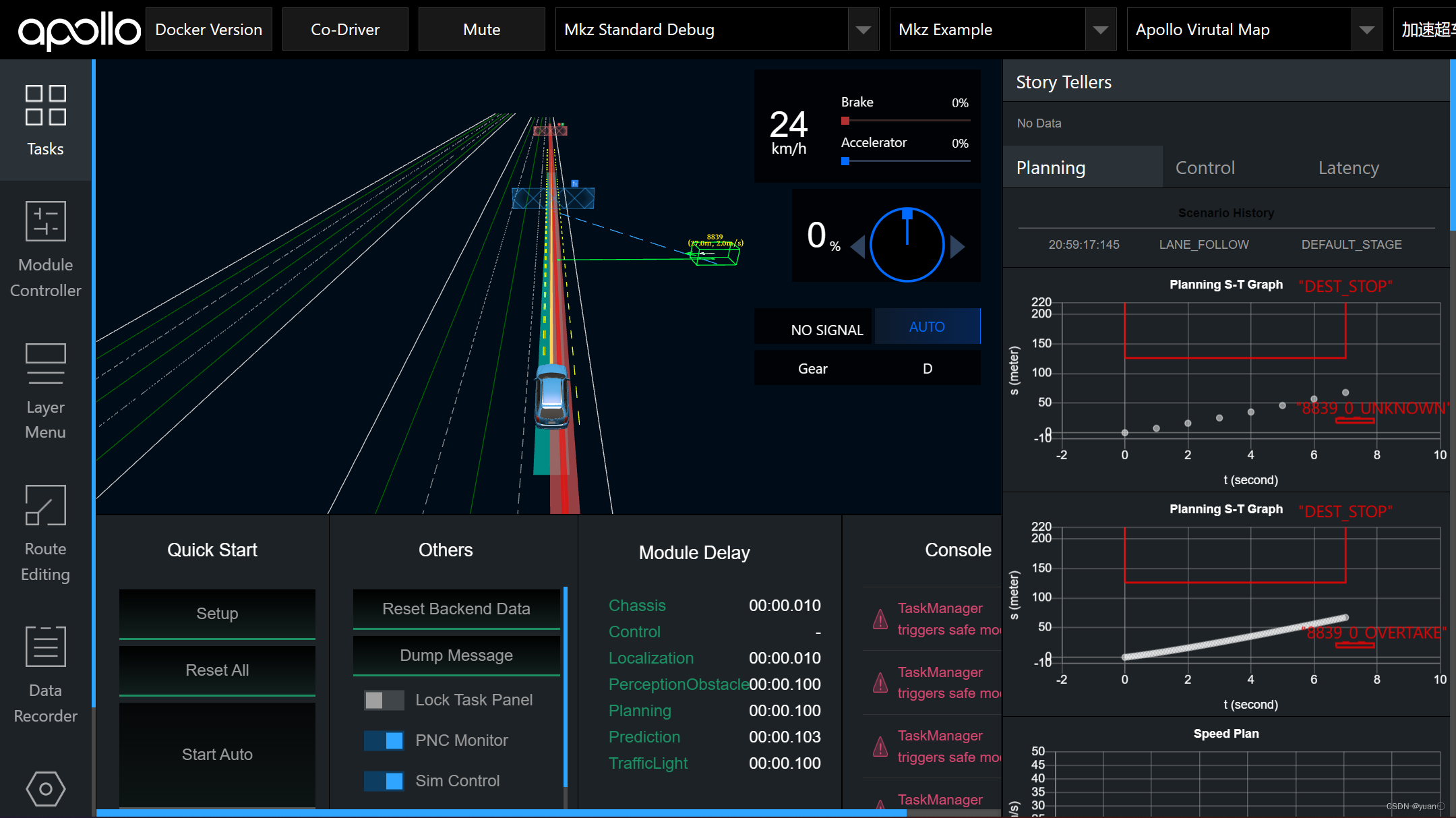
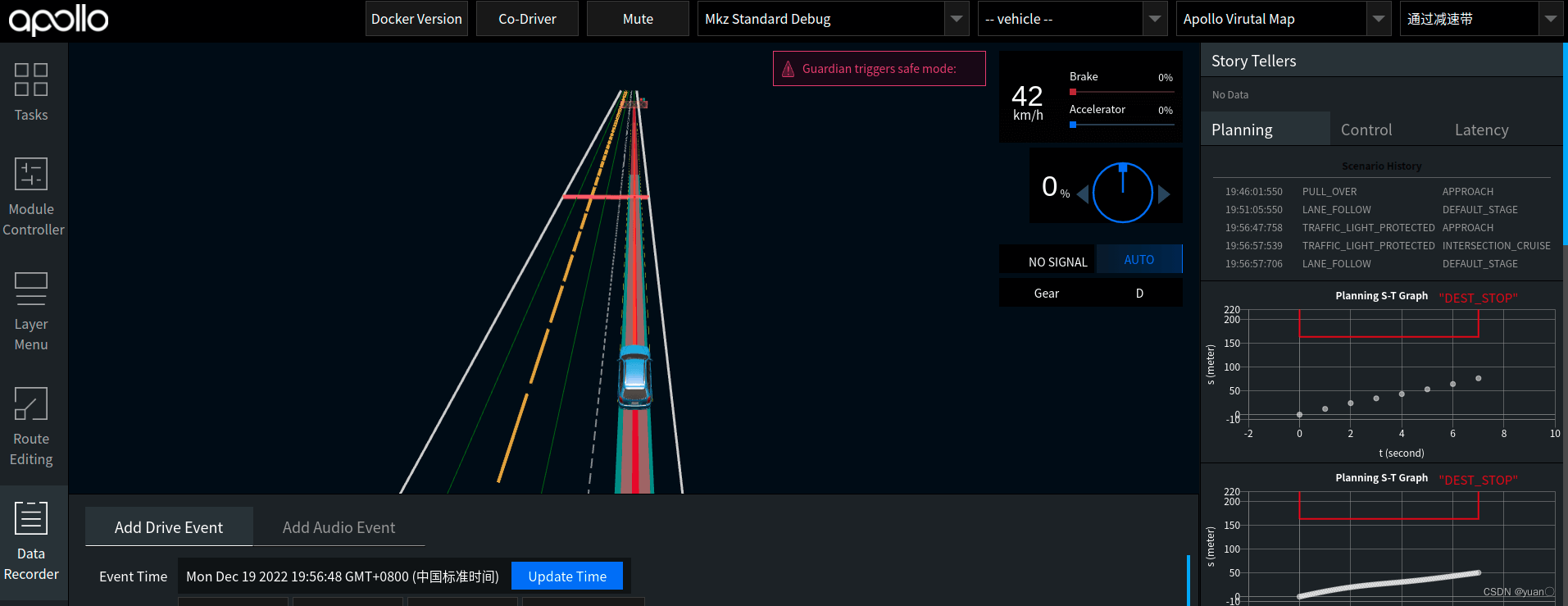
模式选择Mkz Standard Debug,地图选择Apollo Virutal Map,打开Sim Control模式,打开PNC Monitor,等待屏幕中间区域出现Mkz车模型和地图后即表示成功进入仿真模式。
点击左侧Tab栏Module Controller,启动Planning,Prediction, Routing模块, 如果需要录制数据则打开Recorder模块。
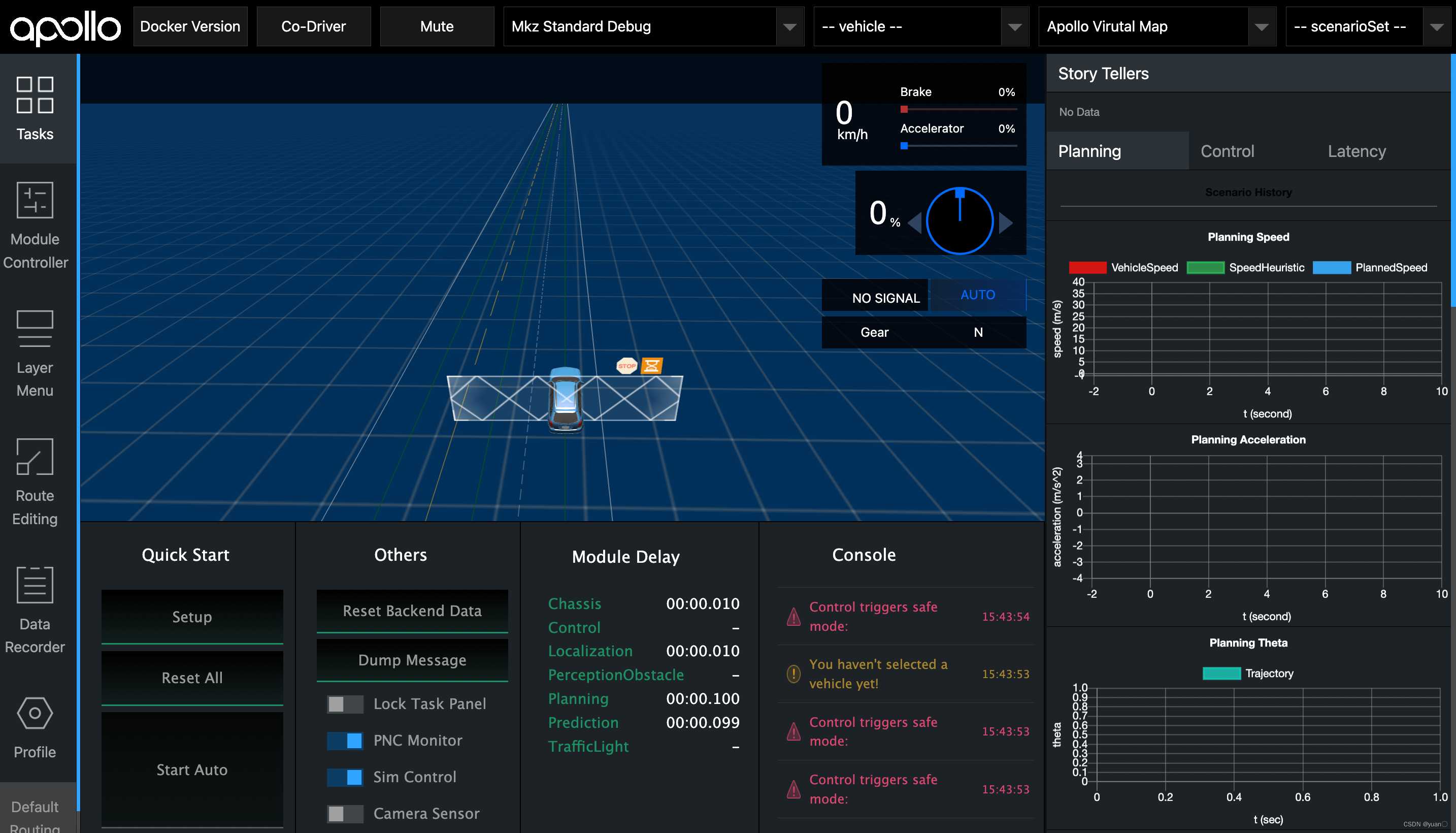
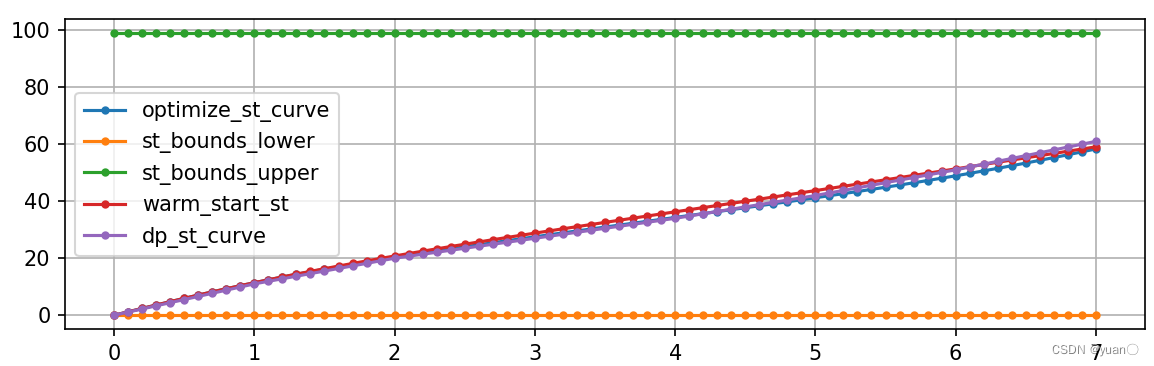
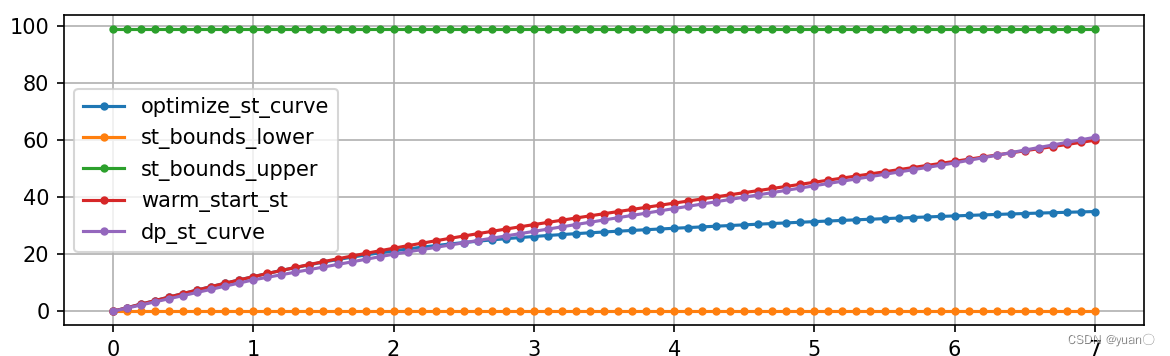
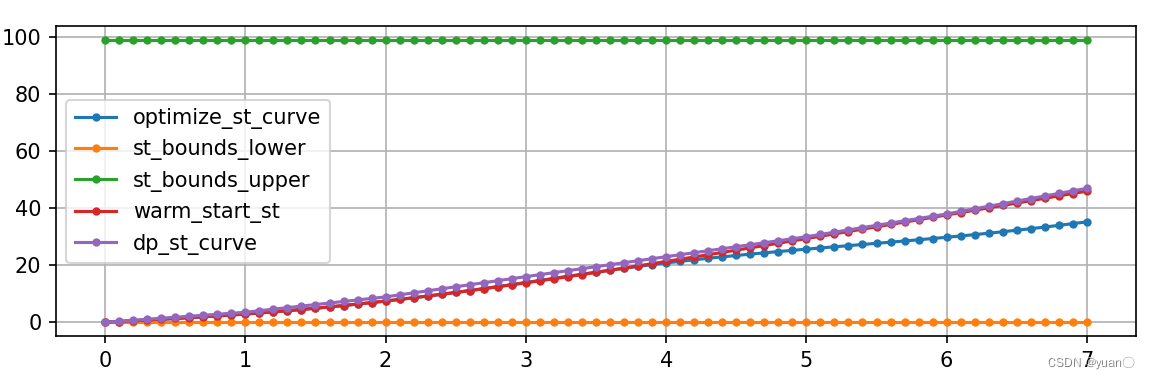
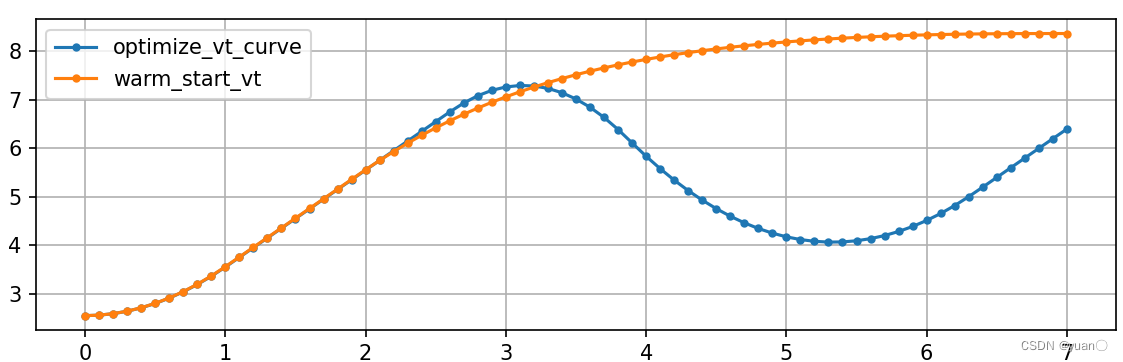
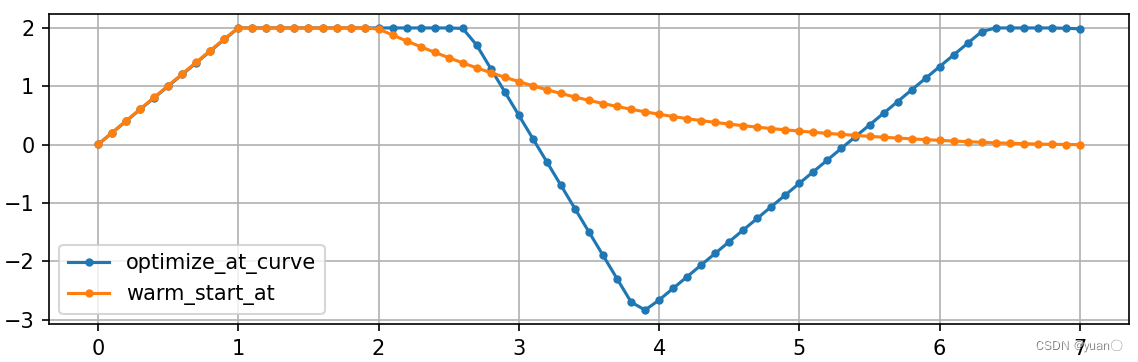
PNC Monitor中上方的st图是动态规划生成的st曲线,下方的st图是优化算法生成的st曲线
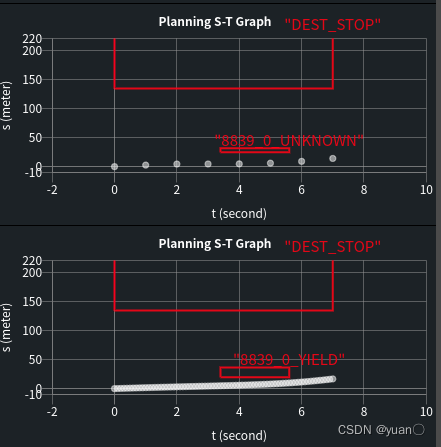
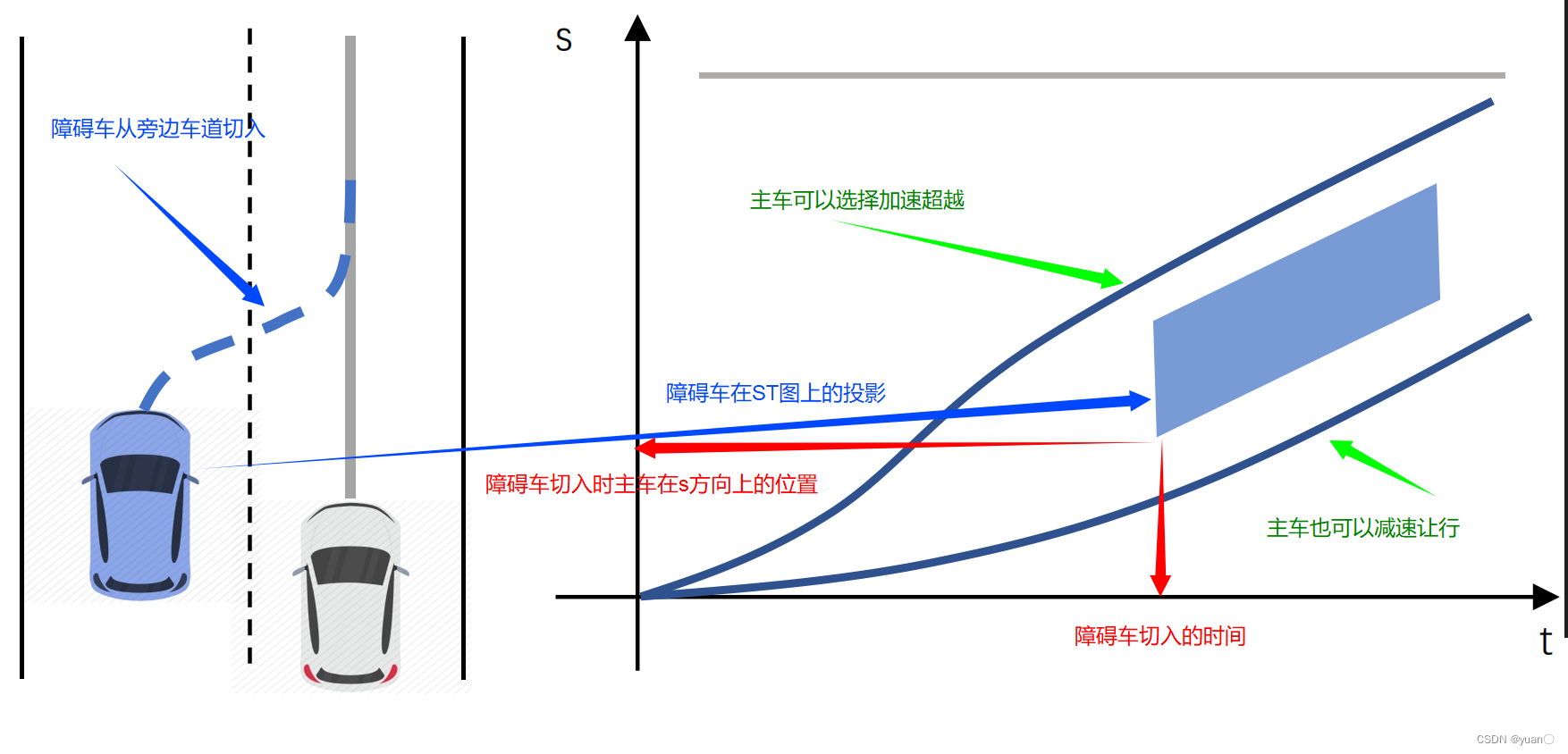
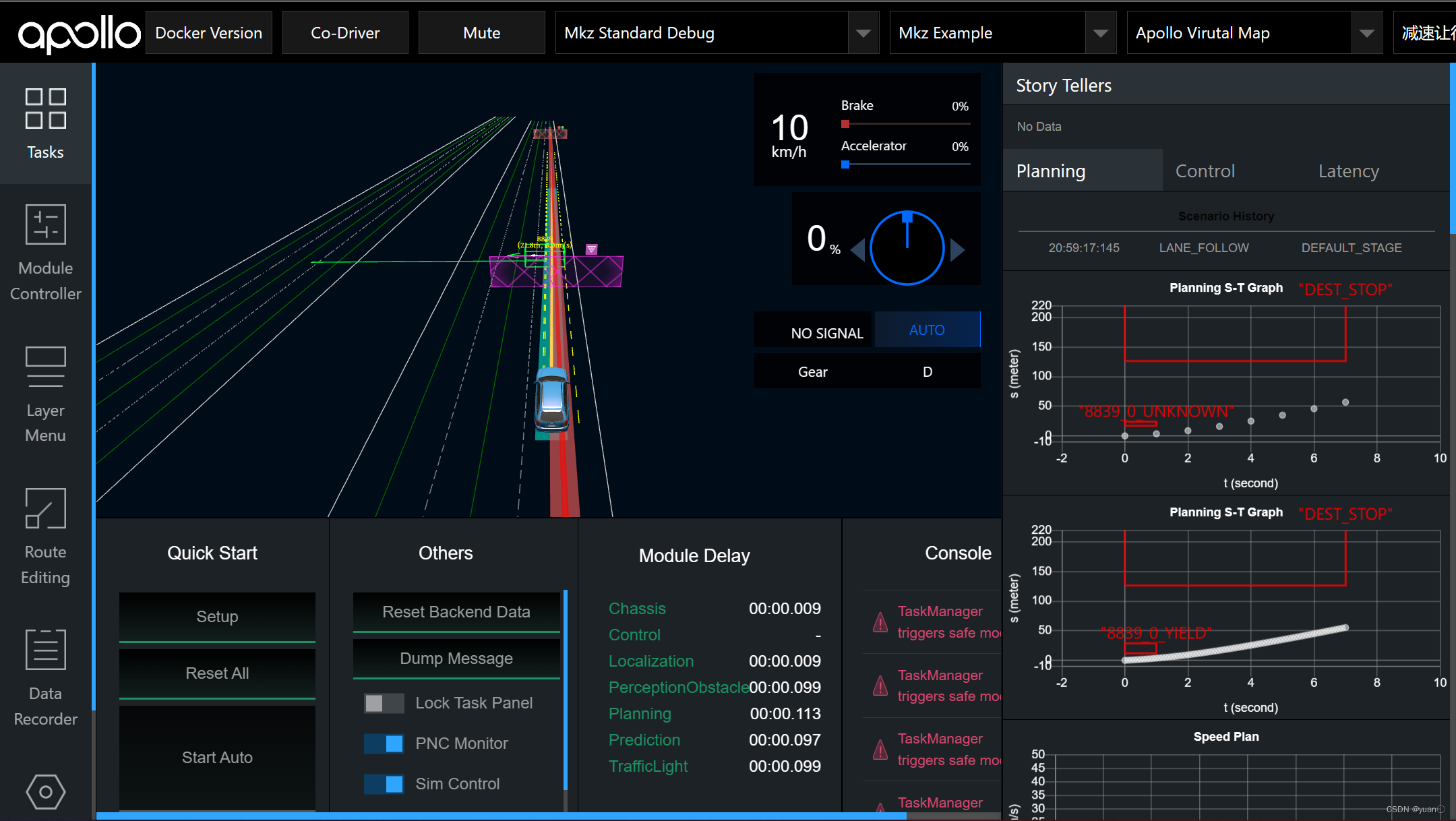
5.1 加速超车,减速让行场景速度规划实践
减速让行的场景,可以看到规划出的曲线在ST图中位于障碍物的下方。
加速超车的场景,可以看到规划出的曲线在ST图中位于障碍物的上方。
5.2 弯道场景速度规划实践
打开Data Recorder,将场景切换为掉头场景,接近弯道时点击Updata Time记录时间,场景运行结束后关闭planning模块

jupyter notebook
创建新的notebook,并输入%matplotlib notebook激活matplotlib

%matplotlib notebook
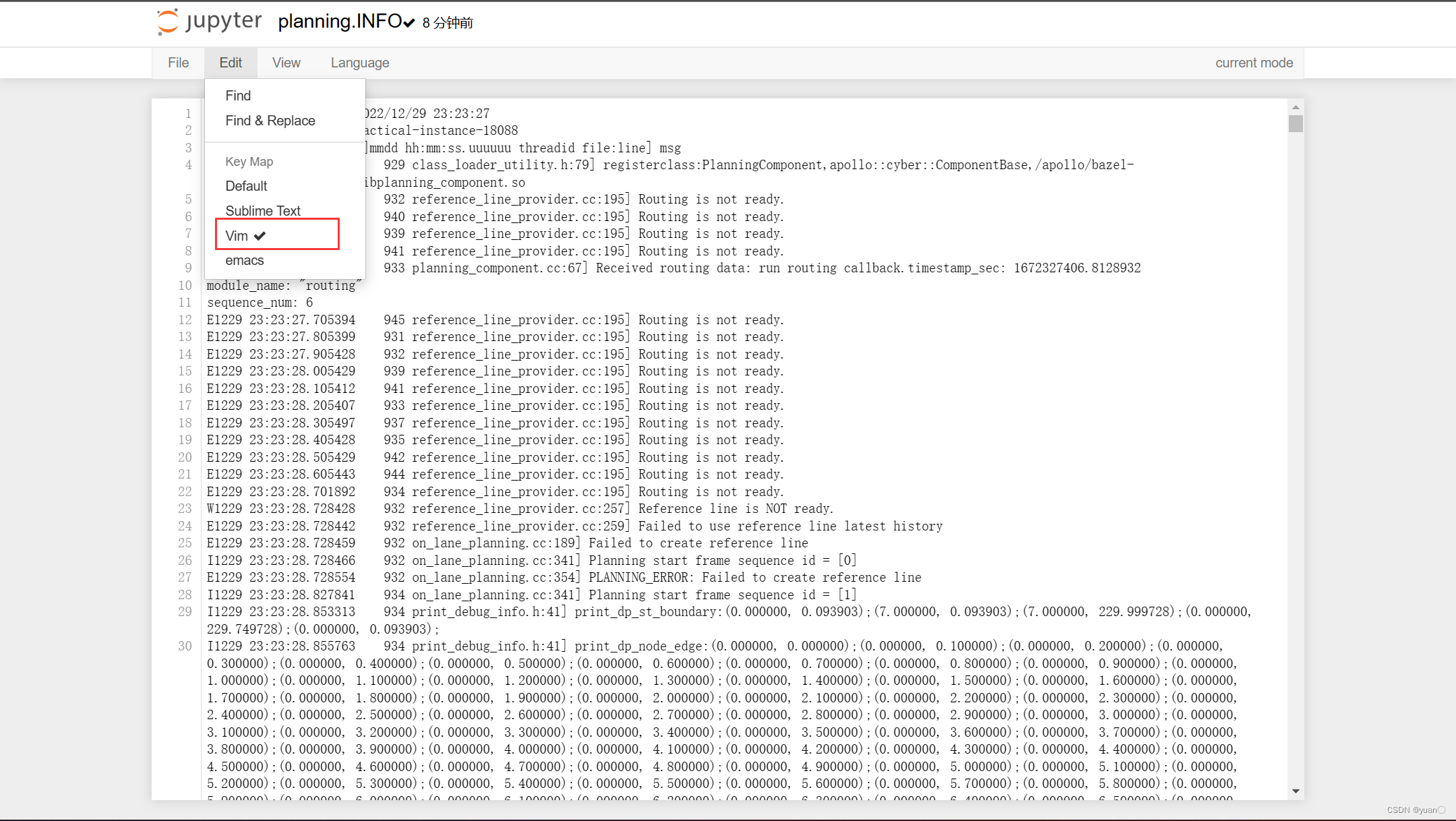
在jupyter notebook中运行以下命令打开对应时间的非线性规划的中间运行结果/apollo/modules/planning/tools/plot_st_nlp.py为绘图脚本文件的路径,planning.INFO为planning日志文件的路径,23:29:03为update更新的时间
run /apollo/modules/planning/tools/plot_st_nlp.py -f planning.INFO -t 23:29:03
有可能会出现这种状况
刷新几次,或将日志文件用其他方式打开(例如vim),当里面出现日志内容时,就可以了


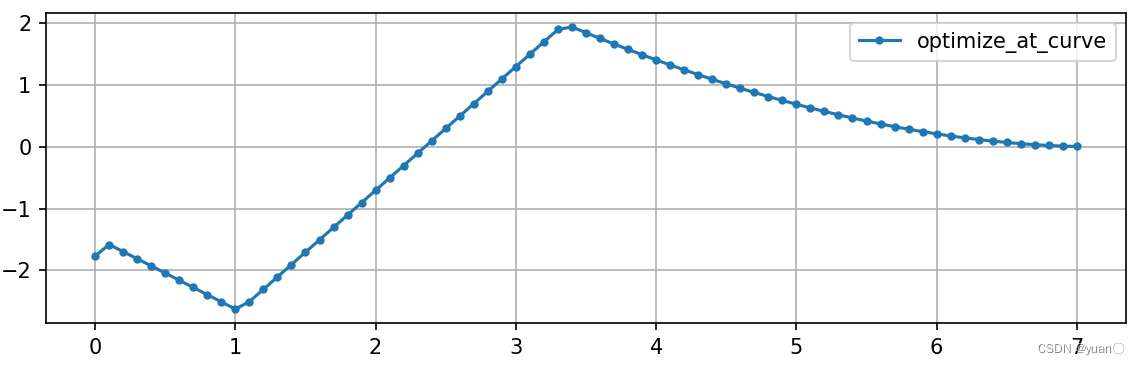
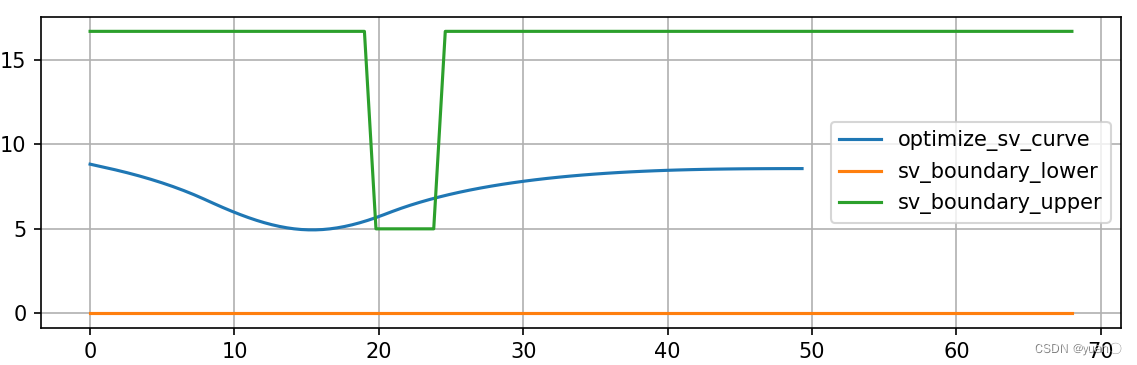
通过点击下方-1 + 1来切换上-帧或下一帧速度规划数据

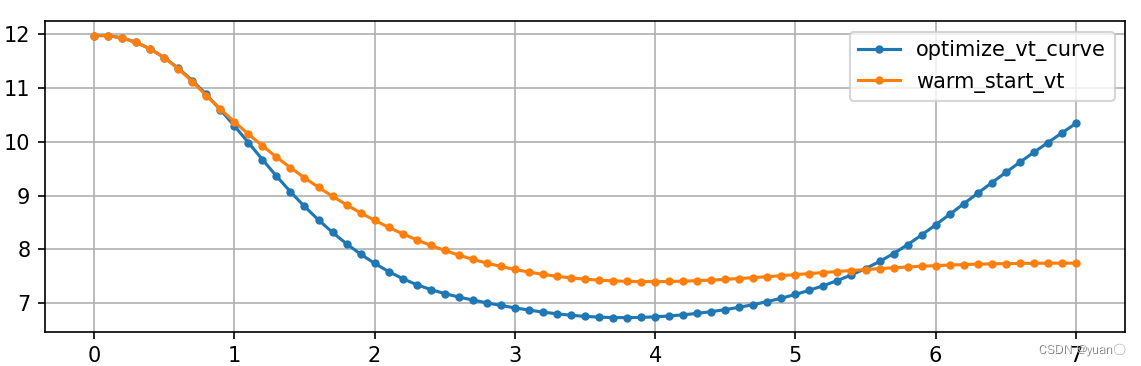
调高planning_ config.pb.txt文件中的横向加速度权重,重新打开planning模块运行掉头场景,观察修改后速度曲线变化
default_task_config: {
task_type: PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER
piecewise_jerk_nonlinear_speed_optimizer_config {
acc_weight: 2.0
jerk_weight: 3.0
lat_acc_weight: 10.0
s_potential_weight: 0.05
ref_v_weight: 5.0
ref_s_weight: 100.0
soft_s_bound_weight: 1e6
use_warm_start: true
}
}
lat_acc_weight: 1000.05.3 通过减速带场景速度规划实践
打开planning模块,切换场景到减速带场景进行仿真,接近减速带时记录下时间,并通过plot st nlp.py脚本观察接近减速带时非线性规划算法的速度规划
在lane_ follow config.pb.txt文件中, 修改速度优化算法为QP算法,重新打开planning模块, 重新运行减速带场景,并记录接近减速带时的时间
stage_config: {
stage_type: LANE_FOLLOW_DEFAULT_STAGE
enabled: true
task_type: LANE_CHANGE_DECIDER
task_type: PATH_REUSE_DECIDER
task_type: PATH_LANE_BORROW_DECIDER
task_type: PATH_BOUNDS_DECIDER
task_type: PIECEWISE_JERK_PATH_OPTIMIZER
task_type: PATH_ASSESSMENT_DECIDER
task_type: PATH_DECIDER
task_type: RULE_BASED_STOP_DECIDER
task_type: SPEED_BOUNDS_PRIORI_DECIDER
task_type: SPEED_HEURISTIC_OPTIMIZER
task_type: SPEED_DECIDER
task_type: SPEED_BOUNDS_FINAL_DECIDER
task_type: PIECEWISE_JERK_SPEED_OPTIMIZER
#task_type: PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER
task_type: RSS_DECIDER
运行plot_ st qp.py,观察二次规划算法的速度 规划曲线在减速带区域速度规划和非线性规划算法有何区别。
非线性规划
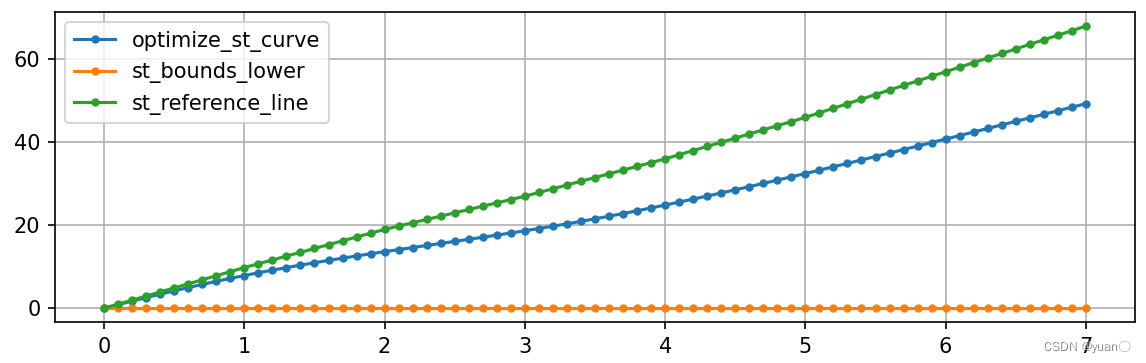
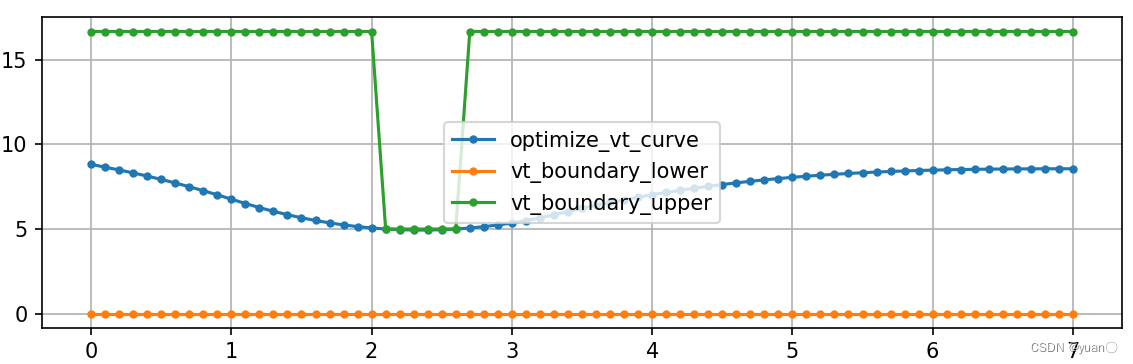
二次规划二次规划求解效率高,但不精确;非线性规划求解效率低,但精度高。