学习一下rl-agents的项目结构以及代码实现思路。
source: https://github.com/eleurent/rl-agents
rl-agent Get start
Installation
pip install --user git+https://github.com/eleurent/rl-agents
Usage
rl-agents中的大部分例子可以通过cd到scripts文件夹 cd scripts,执行 python experiments.py命令实现。
Usage:
experiments evaluate <environment> <agent> (--train|--test)
[--episodes <count>]
[--seed <str>]
[--analyze]
experiments benchmark <benchmark> (--train|--test)
[--processes <count>]
[--episodes <count>]
[--seed <str>]
experiments -h | --help
Options:
-h --help Show this screen.
--analyze Automatically analyze the experiment results.
--episodes <count> Number of episodes [default: 5].
--processes <count> Number of running processes [default: 4].
--seed <str> Seed the environments and agents.
--train Train the agent.
--test Test the agent.
evaluate命令允许在给定的环境中评估给定的agent。例如,
# Train a DQN agent on the CartPole-v0 environment
$ python3 experiments.py evaluate configs/CartPoleEnv/env.json configs/CartPoleEnv/DQNAgent.json --train --episodes=200
每个agent都按照标准接口与环境交互:
action = agent.act(state)
next_state, reward, done, info = env.step(action)
agent.record(state, action, reward, next_state, done, info)
环境的配置文件
{
"id": "intersection-v0",
"import_module": "highway_env",
"observation": {
"type": "Kinematics",
"vehicles_count": 15,
"features": ["presence", "x", "y", "vx", "vy", "cos_h", "sin_h"],
"features_range": {
"x": [-100, 100],
"y": [-100, 100],
"vx": [-20, 20],
"vy": [-20, 20]
},
"absolute": true,
"order": "shuffled"
},
"destination": "o1"
}
agent的配置文件,核心就是"__class__": "<class 'rl_agents.agents.deep_q_network.pytorch.DQNAgent'>",利用agent_factory进行agent的创建。
{
"__class__": "<class 'rl_agents.agents.deep_q_network.pytorch.DQNAgent'>",
"model": {
"type": "MultiLayerPerceptron",
"layers": [128, 128]
},
"gamma": 0.95,
"n_steps": 1,
"batch_size": 64,
"memory_capacity": 15000,
"target_update": 512,
"exploration": {
"method": "EpsilonGreedy",
"tau": 15000,
"temperature": 1.0,
"final_temperature": 0.05
}
}
如果部分key缺失的话,会使用默认的值agent.default_config()。
最后,可以在基准(baseline)测试中安排一批实验。然后在几个进程上并行执行所有实验。
# Run a benchmark of several agents interacting with environments
$ python3 experiments.py benchmark cartpole_benchmark.json --test --processes=4
基准配置文件包含环境配置列表和agent配置列表。
{
"environments": ["configs/CartPoleEnv/env.json"],
"agents": [
"configs/CartPoleEnv/DQNAgent.json",
"configs/CartPoleEnv/LinearAgent.json",
"configs/CartPoleEnv/MCTSAgent.json"
]
}
Monitoring
有几种工具可用于监控agent性能:
- Run metadata:为了可重复性,将运行所用的环境和agent配置合并,并保存到
metadata.*.json文件中。 - Gym Monitor:每次运行的主要统计数据(episode rewards, lengths, seeds)都会记录到
episode_batch.*.stats.json文件中。可以通过运行scripts/analyze.py来自动可视化这些数据。 - Logging:agent可以通过标准的Python日志记录库发送消息。默认情况下,所有日志级别为INFO的消息都会保存到
logging.*.lo文件中。要保存日志级别为DEBUG的消息,请添加选项scripts/experiments.py --verbose。 - Tensorboard:默认情况下,一个tensoboard writer会记录有关有用标量、图像和模型图的信息到运行目录。可以通过运行以下命令来进行可视化:
tensorboard --logdir <path-to-runs-dir>。
具体代码
rl-agents核心代码集中在rl-agents文件夹和scripts文件夹中,其中,rl-agents主要实现相关的算法,scripts为相应的配置文件。
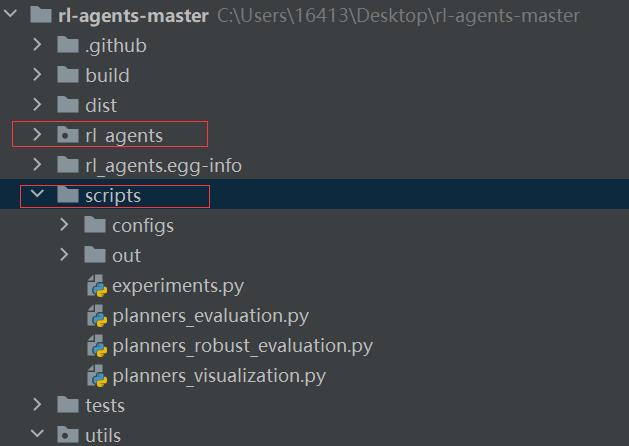
experiments.py为入口程序,先从它看起,其相应的用法如下:
Usage:
experiments evaluate <environment> <agent> (--train|--test) [options]
experiments benchmark <benchmark> (--train|--test) [options]
experiments -h | --help
Options:
-h --help Show this screen.
--episodes <count> Number of episodes [default: 5].
--no-display Disable environment, agent, and rewards rendering.
--name-from-config Name the output folder from the corresponding config files
--processes <count> Number of running processes [default: 4].
--recover Load model from the latest checkpoint.
--recover-from <file> Load model from a given checkpoint.
--seed <str> Seed the environments and agents.
--train Train the agent.
--test Test the agent.
--verbose Set log level to debug instead of info.
--repeat <times> Repeat several times [default: 1].
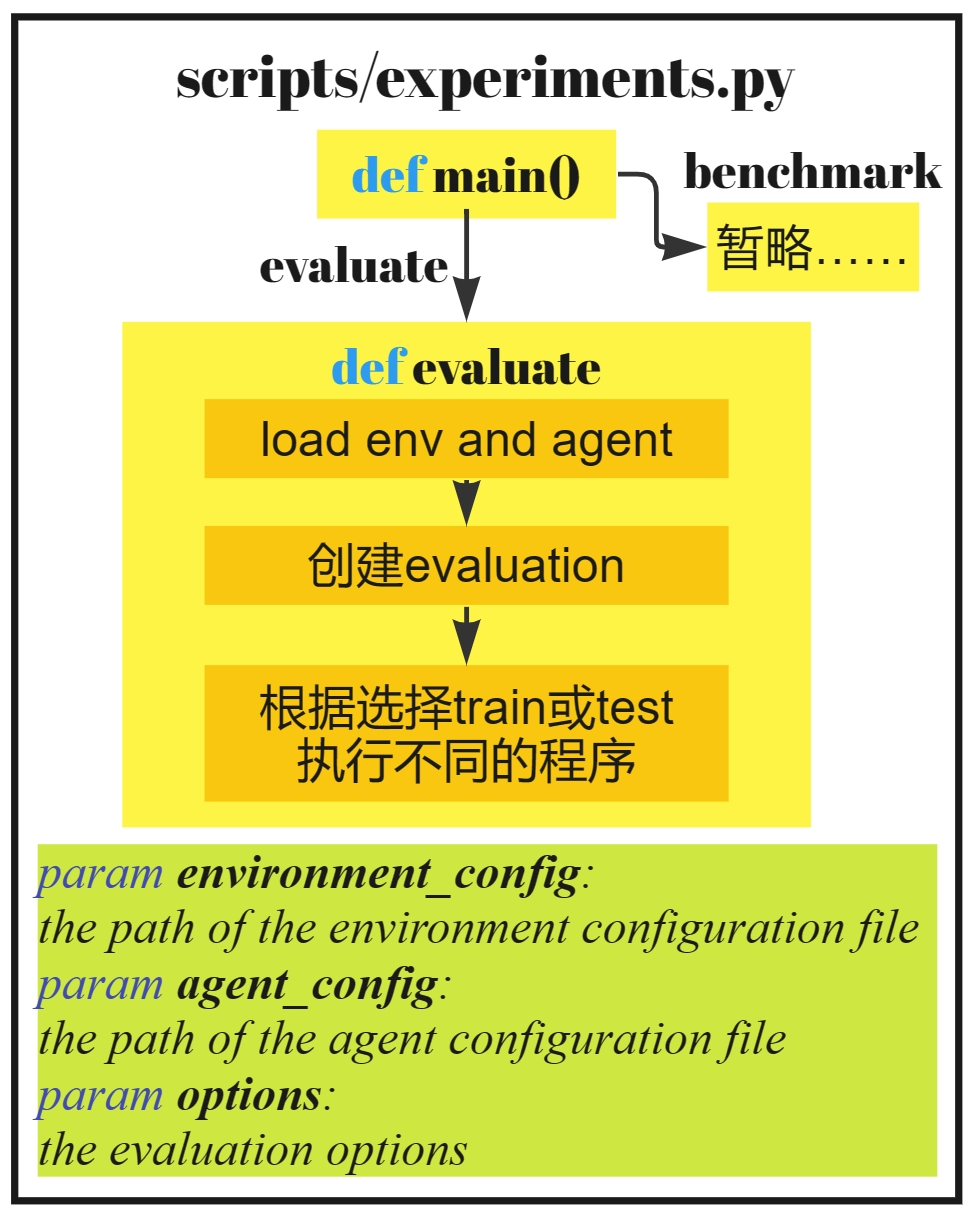
首先从main函数开始,根据evaluate或者benchmark执行相应的任务。暂且先从evaluate入手。
def main():
opts = docopt(__doc__)
if opts['evaluate']:
for _ in range(int(opts['--repeat'])):
evaluate(opts['<environment>'], opts['<agent>'], opts)
elif opts['benchmark']:
benchmark(opts)
evaluate主要完成env、agent的创建以及evaluation 对象的创建,再根据选择train或test执行不同的程序。
def evaluate(environment_config, agent_config, options):
"""
Evaluate an agent interacting with an environment.
:param environment_config: the path of the environment configuration file
:param agent_config: the path of the agent configuration file
:param options: the evaluation options
"""
logger.configure(LOGGING_CONFIG)
if options['--verbose']:
logger.configure(VERBOSE_CONFIG)
env = load_environment(environment_config)
agent = load_agent(agent_config, env)
run_directory = None
if options['--name-from-config']:
run_directory = "{}_{}_{}".format(Path(agent_config).with_suffix('').name,
datetime.datetime.now().strftime('%Y%m%d-%H%M%S'),
os.getpid())
options['--seed'] = int(options['--seed']) if options['--seed'] is not None else None
evaluation = Evaluation(env,
agent,
run_directory=run_directory,
num_episodes=int(options['--episodes']),
sim_seed=options['--seed'],
recover=options['--recover'] or options['--recover-from'],
display_env=not options['--no-display'],
display_agent=not options['--no-display'],
display_rewards=not options['--no-display'])
if options['--train']:
evaluation.train()
elif options['--test']:
evaluation.test()
else:
evaluation.close()
return os.path.relpath(evaluation.run_directory)
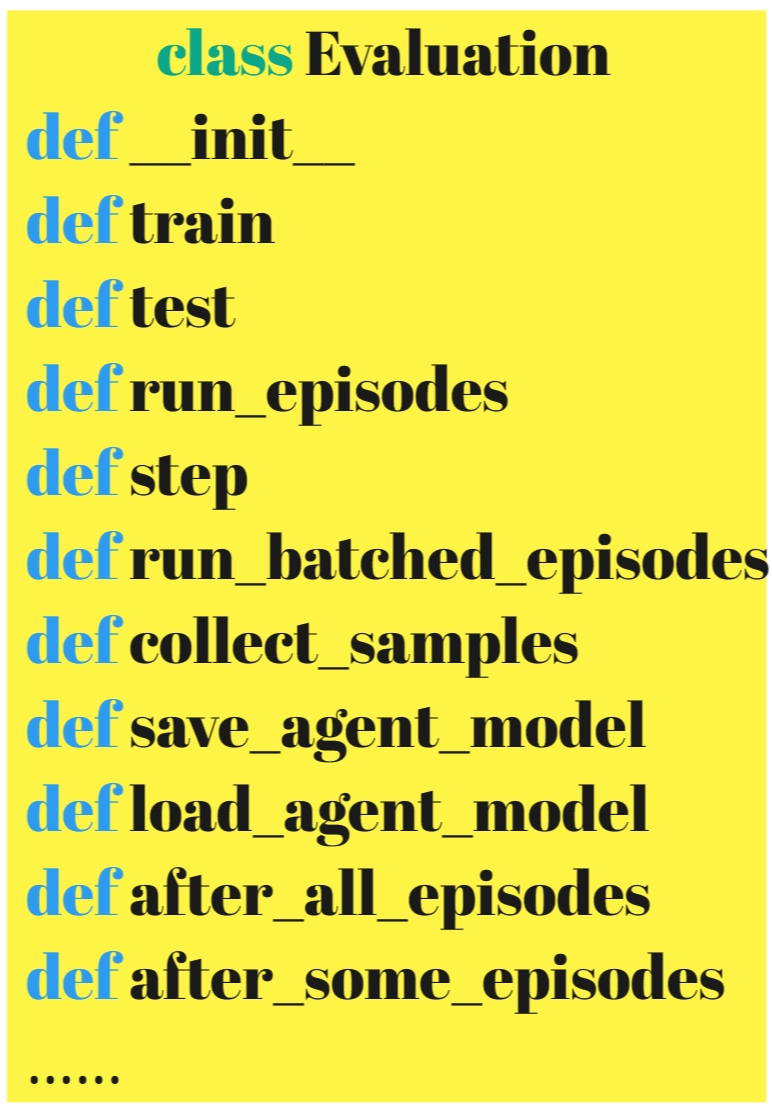
Evaluation类中主要包含以下函数:
__init__的一些参数说明
| 参数 | 描述 |
|---|---|
| env | 要解决的环境,可能是包装了AbstractEnv的环境 |
| agent | 解决环境的AbstractAgent agent |
| directory | 工作空间目录路径 |
| run_directory | 运行目录路径 |
| num_episodes | 运行的episode数 |
| training | agent是处于训练模式还是测试模式 |
| sim_seed | 环境/agent随机性源的种子 |
| recover | 从文件中恢复agent参数。如果为True,则使用默认的最新保存。如果为字符串,则将其用作路径。 |
| display_env | 渲染环境,并有一个监视器录制其视频 |
| display_agent | 如果支持,将agent图形添加到环境查看器中 |
| display_rewards | 通过episodes显示agent的性能 |
| close_env | 当评估结束时,是否应该关闭环境 |
| step_callback_fn | 在每个环境步骤之后调用的回调函数。它接受以下参数:(episode, env, agent, transition, writer)。 |
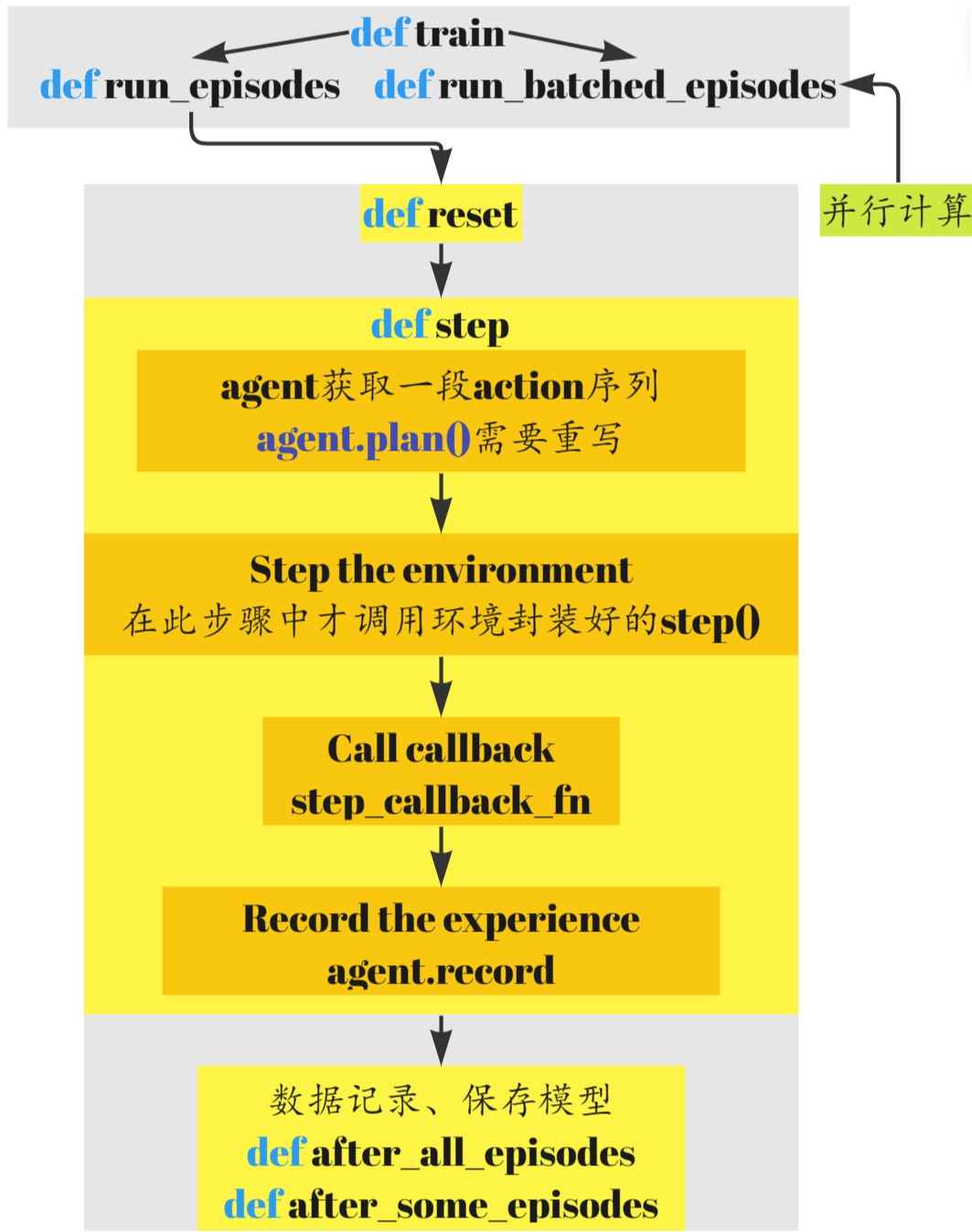
首先看一下train,根据agent是否有batched属性,分为run_batched_episodes和run_episodes
def train(self):
self.training = True
if getattr(self.agent, "batched", False):
self.run_batched_episodes()
else:
self.run_episodes()
self.close()
run_episodes就是一般强化学习的基本过程,注意其中的reset step 等函数都是经过封装的。实现自己的算法时需要注意。run_batched_episodes则主要实现一些并行计算的任务,这一部分等之后再详细介绍。
def run_episodes(self):
for self.episode in range(self.num_episodes):
# Run episode
terminal = False
self.reset(seed=self.episode)
rewards = []
start_time = time.time()
while not terminal:
# Step until a terminal step is reached
reward, terminal = self.step()
rewards.append(reward)
# Catch interruptions
try:
if self.env.unwrapped.done:
break
except AttributeError:
pass
# End of episode
duration = time.time() - start_time
self.after_all_episodes(self.episode, rewards, duration)
self.after_some_episodes(self.episode, rewards)
test为模型测试部分
def test(self):
"""
Test the agent.
If applicable, the agent model should be loaded before using the recover option.
"""
self.training = False
if self.display_env:
self.wrapped_env.episode_trigger = lambda e: True
try:
self.agent.eval()
except AttributeError:
pass
self.run_episodes()
self.close()
其中eval也需要进行重写。
def eval(self):
"""
Set to testing mode. Disable any unnecessary exploration.
"""
pass