论文
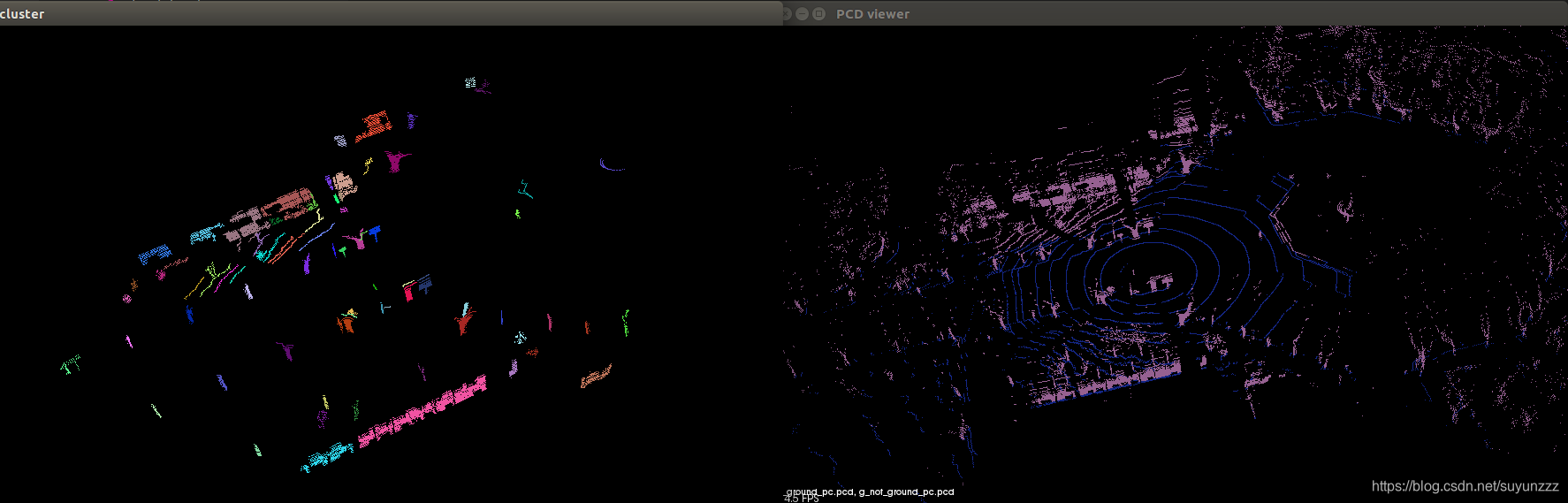
Fast Segmentation of 3D Point Clouds: A Paradigm on LiDAR Data for Autonomous Vehicle Applications
github
https://github.com/VincentCheungM/Run_based_segmentation
不需要ROS的版本
https://github.com/suyunzzz/aiimooc_lesson/tree/c7b16e161af3d998f3ad0cbc3e3e3849f71319d6/week4homework
ros版本
https://blog.csdn.net/suyunzzz/article/details/106292024