看到一篇介绍机器人仿真软件的文章,转载一下,涨见识。
原文出处:http://www.cnblogs.com/muxi/archive/2012/03/11/2390660.html
下面介绍几款基于ODE的机器人仿真软件:
Gazebo:
用于移动机器人的仿真环境,可以通过简单的可手动编辑的XML文件创建模拟环境,并且可以装载由Blender导出的模型。它使用ODE作为物理学引擎,使用Ogre3D作为图形引擎,并且无缝集成 PlayerStage,这就意味着用于控制仿真机器人的代码就可以直接应用于实体机器人。不过,该软件仅支持Linux平台,是一款在GPL协议授权下的开源软件。
Marilou (anyKode)
一款用于遵守现实世界物理规律的移动机器人、类人机器人、铰接臂(即多关节手臂)、并行机器人的建模和仿真环境。你可以利用Marilou编辑器创建复杂的物理配件用于重用或者从一个机器人连接到另一个机器人。这套软件能够同时支持Linux和Windows平台,但是仅对业余爱好者和机器人学项目免费授权。

Webots (Cyberbotics)
这是一款广泛用于机器人学研究和教育的快速原型化和仿真环境。它采用ODE库作为其碰撞检测和刚体动力学引擎。Webots仿真频繁使用于机器人学中的传感器和制动器。例如:环境传感器、光线传感器、触感传感器、GPS、加速器、摄像机、发射机和接收机,伺服电机(旋转的和线性的)、位置及压力传感器、LED、抓爪器等等。Webots支持Windows、MacOS和Linux 32/64平台。其提供多个不同的收费版本以及一个免费版。
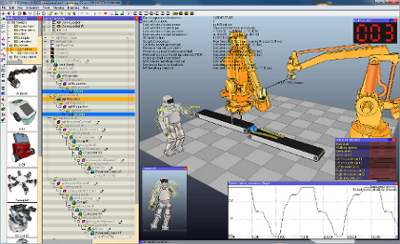
V-REP (Virtual Robot Experimentation Platform)
V-REP是一款分布式控制的3D机器人仿真器,它允许创建全套的机器人系统,通过专用的硬件进行仿真和交互。它使用多种不同的计算模型(动力学基于ODE和Bullet,反向运动学、环境传感器、视觉传感器、路径规划、碰撞检测、最短路径计算,绘图等),并且提供一套非常详尽的API接口。V-REP支持CAD数据导入,机器人和世界编辑以及用户接口编辑。目前只支持Windows和Mac OSX,Linux版本仍在开发中。提供若干个收费版本,但向学生提供全功能免费版本。