目录
相关阅读
OpenCV:高通滤波之索贝尔、沙尔和拉普拉斯-CSDN博客
在图像中添加高斯噪声
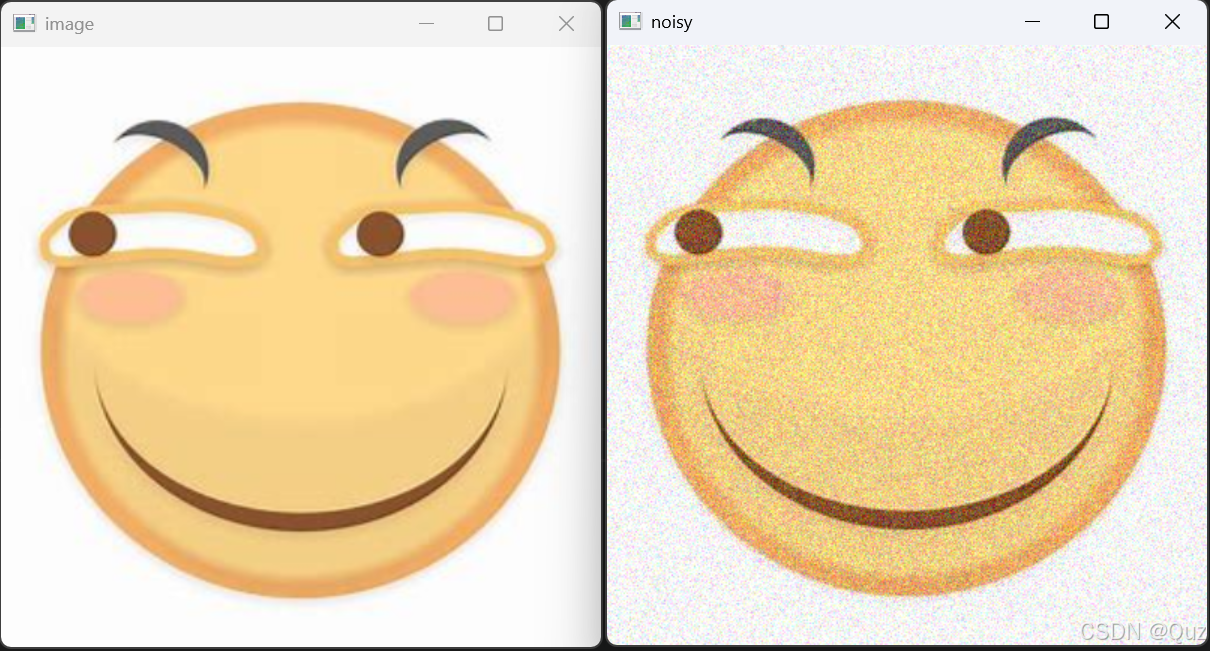
高斯噪声是一种常见的噪声类型,其特性是噪声值服从正态分布(Gaussian distribution)。在图像处理中,添加高斯噪声可以用于测试算法的抗噪性能或生成合成数据。
高斯噪声的特性
高斯噪声的数学公式如下:

其中:μ 为均值,决定噪声的中心值,σ 为标准差,决定噪声的强度。
在图像中,添加高斯噪声通常需要在每个像素值上叠加服从高斯分布的随机值。
添加高斯噪声的实现
以下是使用 Python 和 OpenCV 给图像添加高斯噪声的步骤。
示例代码
import cv2
import numpy as np
# 读取图像
image = cv2.imread("D:\\resource\\huaji.jpg")
image = cv2.resize(image, (400, 400)) # 调整大小方便显示
# 将图像转换为浮点型
image_float = image.astype(np.float32) / 255.0
# 定义高斯噪声参数
mean = 0 # 噪声的均值
stddev = 0.1 # 噪声的标准差
# 生成高斯噪声
gaussian_noise = np.random.normal(mean, stddev, image_float.shape)
# 将噪声添加到图像
noisy_image = image_float + gaussian_noise
# 将结果裁剪到 [0, 1] 范围
noisy_image = np.clip(noisy_image, 0, 1)
# 转换回 0-255 范围并转换为 uint8 类型
noisy_image = (noisy_image * 255).astype(np.uint8)
# 显示结果
cv2.imshow("image", image)
cv2.imshow("noisy", noisy_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
参数说明
- mean: 高斯噪声的均值,通常设为 0。
- stddev: 高斯噪声的标准差,值越大,噪声越明显。
- np.random.normal: 用于生成服从正态分布的随机噪声。
- np.clip: 确保像素值仍然在 [0, 1] 或 [0, 255] 的合法范围内。
运行效果
给图像添加胡椒噪声
胡椒噪声 是一种常见的二值噪声类型,与 盐噪声 搭配使用通常称为 椒盐噪声。它会在图像中随机生成黑点,模拟传感器故障或数据传输中的错误。
胡椒噪声的特性
- 胡椒噪声:像素值变为 黑色(0)。
- 与 盐噪声(白色点,像素值为 255) 不同,胡椒噪声专注于图像中的随机黑点。
实现胡椒噪声的步骤
以下是添加胡椒噪声的 Python 代码,基于 OpenCV 和 NumPy 实现。
示例代码
import cv2
import numpy as np
# 读取图像
image = cv2.imread("D:\\resource\\huaji.jpg")
image = cv2.resize(image, (400, 400)) # 调整大小方便显示
# 定义胡椒噪声的比例
pepper_prob = 0.02 # 噪声比例(例如 2%)
# 创建随机矩阵
random_matrix = np.random.rand(*image.shape)
# 在随机矩阵中将小于噪声比例的点设置为 0(胡椒噪声)
pepper_noise = image.copy()
pepper_noise[random_matrix < pepper_prob] = 0
# 显示结果
cv2.imshow("Image", image)
cv2.imshow("Noise", pepper_noise)
cv2.waitKey(0)
cv2.destroyAllWindows()
参数说明
- pepper_prob: 控制胡椒噪声的密度(比例),值越大,黑点越多。
- np.random.rand(*gray_image.shape): 生成与图像相同大小的随机矩阵。
- pepper_noise[random_matrix < pepper_prob] = 0: 将随机矩阵中小于阈值的位置设置为黑色(0)。
运行效果
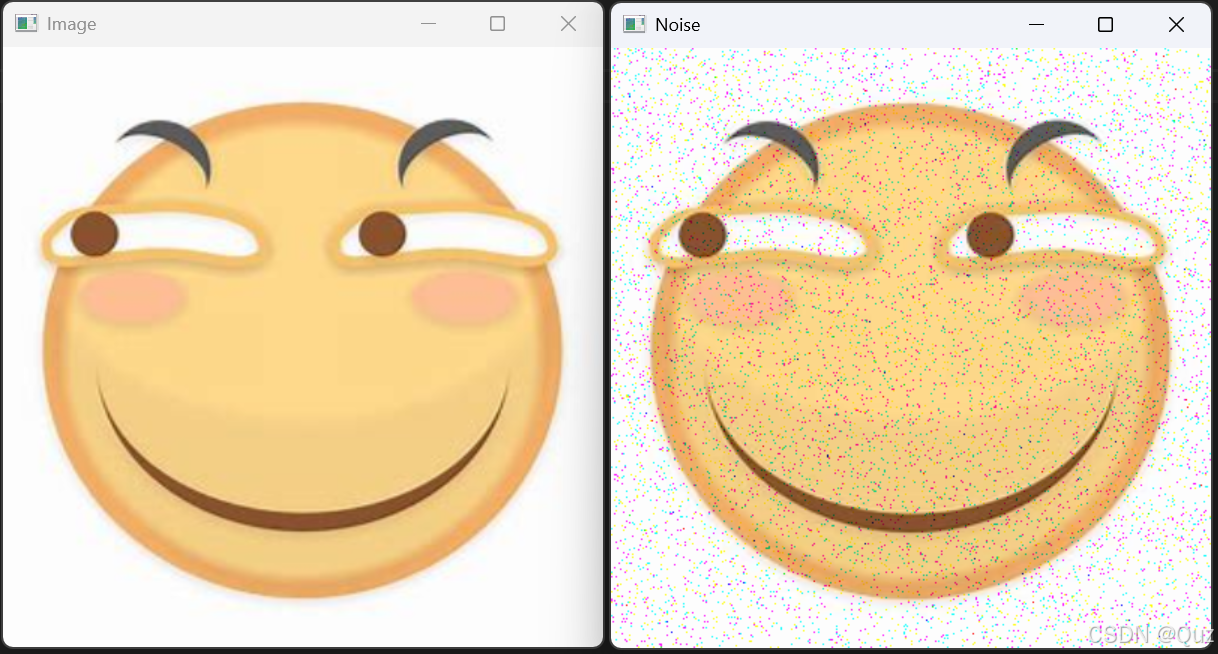
胡椒噪声通过在图像中引入黑点,模拟了现实中的噪声情况。结合降噪算法(如中值滤波)可以有效去除此类噪声,提高图像质量。通过调整噪声比例,可以测试算法在不同噪声强度下的表现。