点云检测算法之PointNet深度解读
论文链接 : PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
代码链接 : PointNet Pytorch
Github链接:有关于环境感知方面的网络介绍及代码链接
背景和亮点
背景
有关于点云的介绍可以参考3D点云基础知识, 总结的来说,点云数据的处理已经成为了3D视觉中必不可少的一部分。其数据相比于2D图像,本身有着先天不需要的特征变换的优势。
点云数据有着以下的特点:
- 无序性 --> 对称函数设计用于表征
- 点不是孤立的,需要考虑局部结构 --> 局部全局特征结合
- 仿射变换无关性 --> alignment network
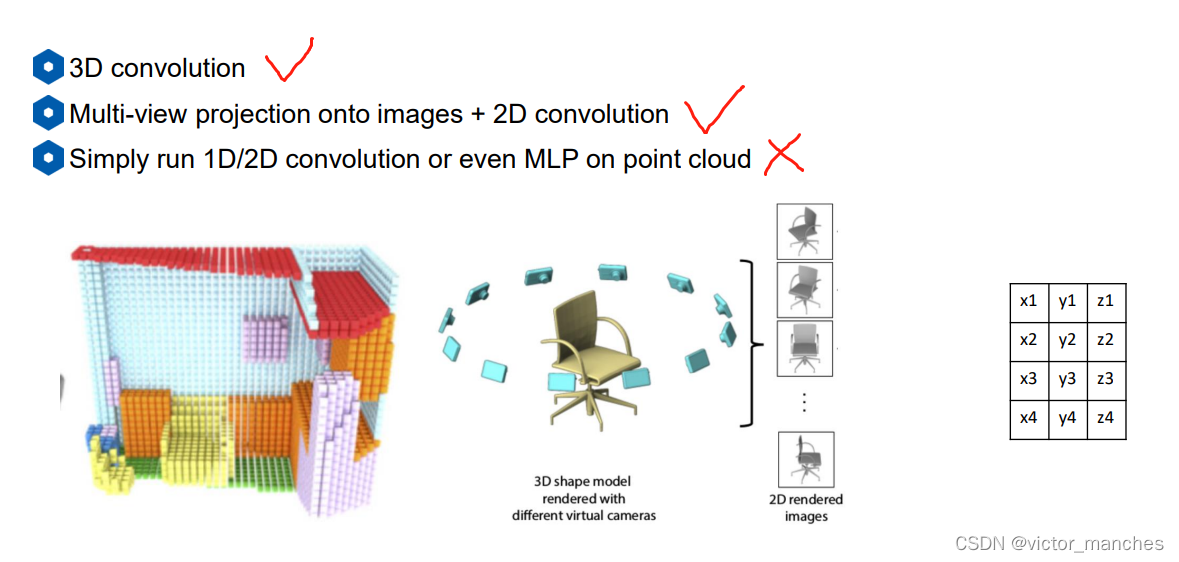
所以,在初期对于点云数据的处理方式主要有下面三种:
- 直接利用3D卷积进行处理,这里的代表有 Volumetric CNNs , VoxNet 等,但是这种做法的缺点在于(a)3D卷积运算量较大(b)点云本身数据比较稀疏,所以3D卷积浪费资源
- 利用多个方向的2维投影,加上2D卷积进行处理,这里的代表作有Multiview CNNs ,但是这种做法的话同样需要认为(a)设定不同的投影角度 以及(b)运算量大的缺点
- 直接将所有点stack起来投入一个MLP,这里的代表作有PointCNN , 这种做法的缺点就是随着stack的顺序不同,结果也完全不同,所以这种做法取的比较少。
亮点
我个人认为pointnet有以下几个亮点:
- PointNet是一个完整的深度神经网络,并且可以同时处理三维图形分类、图形的局部分割以及场景的语义分割等任务
- 整合了全局和局部的特征。
网络结构
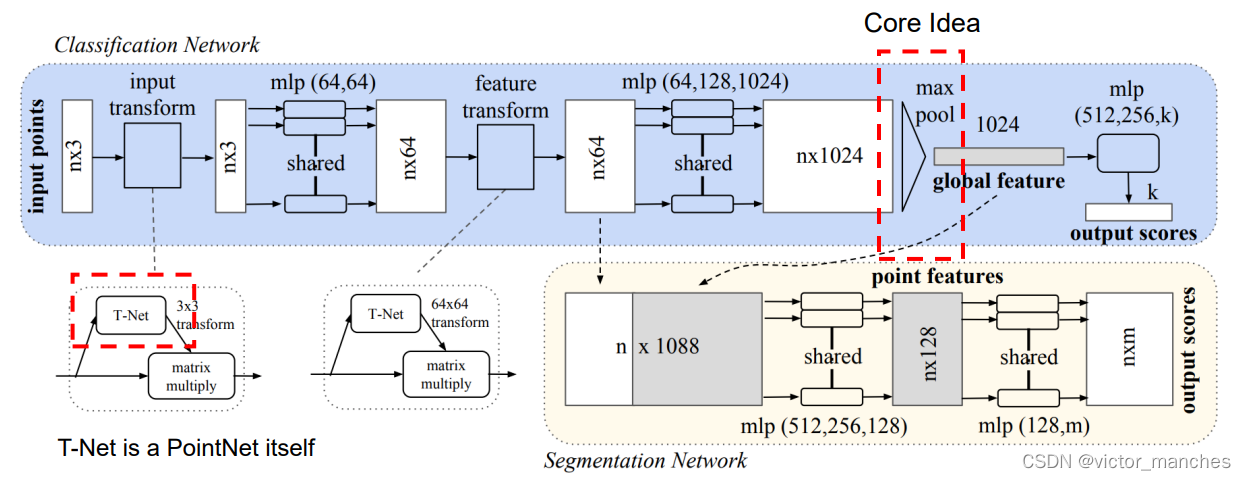
首先对于一个N * 3 的点云数据,通过一个T-Net(这个目前已经没人用了,感兴趣的可以自己去了解下) , 3维的数据通过几个共享权重的mlp ,这里可以看成是升维从3维数据升高至最终的1024维信息,然后是PointNet核心: 通过对这N个点的1024维的数据做maxpooling, 从而代表全局特征信息的1024个点的信息。 最终再经过几个mlp从而达到分类的任务。
而对于语义分割的任务,由于其是point-wise feature , 所以需要融合局部和全局的特征,这里PointNet就直接将1024 维提的全局信息 复制 N份直接拼接上之前的N * 64维的数据,得到一个N * 1088维度的信息,再通过一系列的mlp 从而将1088维的信息 降低到m类里。
从这里就可以发现PointNet的核心其实就在于提取全局特征的max_Pooling,而对于语义分割任务来说,其只结合了全局的信息,并没有整合邻域的信息(这个在pointnet++上有体现)。
除了上面这些作者结合点云数据的特征,还做了一些trick:
- 对于样本采用了随机DownSample, 因为取局部像素不影响分类任务,有点类似图像的Crop
- 数据坐标点加入了高斯噪声以及旋转(z轴),相当于做了数据增广
而对于损失函数,这里分类任务就用了比较简单的交叉熵损失函数。
代码复现
源码链接: 源代码Git连接
数据连接: MobelNet40
本人实现了一个简易版的PointNet的分类版本,其核心网络代码如下:
class GlobalFeatures(nn.Module):
def __init__(self) -> None:
super(GlobalFeatures , self).__init__()
#考虑的全局特征所以用Conv
self.conv1 = nn.Sequential(nn.Conv1d(3 , 64 , 1) , nn.BatchNorm1d(64) , nn.ReLU() )
self.conv2 = nn.Sequential(nn.Conv1d(64 , 128 , 1) , nn.BatchNorm1d(128) , nn.ReLU())
self.conv3 = nn.Sequential(nn.Conv1d(128 , 1024 , 1) , nn.BatchNorm1d(1024) , nn.ReLU())
def forward(self, x):
x = self.conv1(x) # B * 64 * N
x = self.conv2(x) # B * 128 * N
x = self.conv3(x) # B * 512 * N
x = torch.max(x, 2, keepdim=True)[0]
x = x.squeeze()
return x
class PointNet(nn.Module):
def __init__(self , class_num ) -> None:
super(PointNet , self).__init__()
self.class_num = class_num
self.globalExtra = GlobalFeatures()
self.fc1 = nn.Sequential( nn.Linear(1024 , 512) , nn.BatchNorm1d(512) ,nn.ReLU())
self.fc2 = nn.Sequential( nn.Linear(512 , 256) , nn.Dropout(0.3), nn.BatchNorm1d(256) , nn.ReLU())
self.fc3 = nn.Sequential( nn.Linear(256 , class_num) , nn.Softmax(dim=1) )
def forward(self, x):
x = self.globalExtra(x) # B * 1024
x = self.fc1(x) # B * 512
x = self.fc2(x) # B * 256
output = self.fc3(x) # B * K
return output
以及在上一节中提到的几个数据增广的Trick的实现:
#data_augmentation
if self.data_augmentation :
theta = np.random.uniform(0, np.pi * 2)
rotation_matrix = np.array([[np.cos(theta), -np.sin(theta)], [np.sin(theta), np.cos(theta)]])
point_set[:, [0, 2]] = point_set[:, [0, 2]].dot(rotation_matrix) # random rotation ? 绕着Y轴转?
point_set += np.random.normal(0, 0.02, size=point_set.shape) # Gaussian jitter jitter
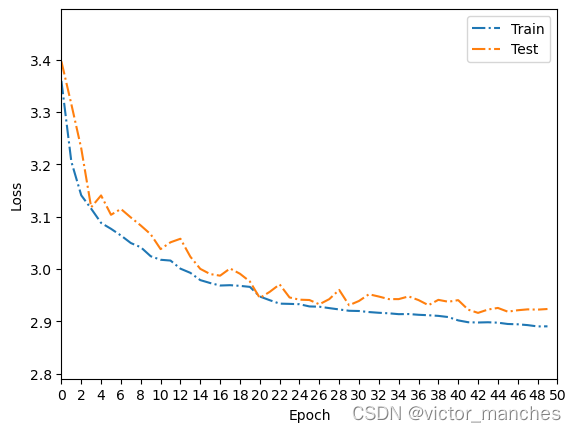
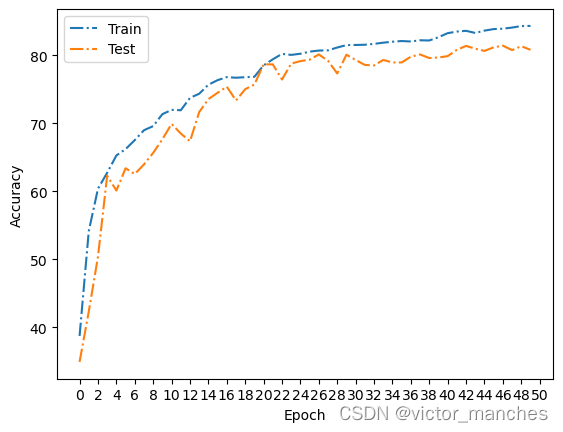
结果
这里跑了50个epoch的结果曲线如下,最终在测试集上的准确率为 80.8 ,但是可以看出来,还是可以继续训练的。