本篇文章主要是在学习单片机串行接口时的学习经历,主要侧重于驱动程序的讲解。下文将通过ESP32S3、STM32两款MCU进行编写驱动案例。

1、AT24C02简要说明
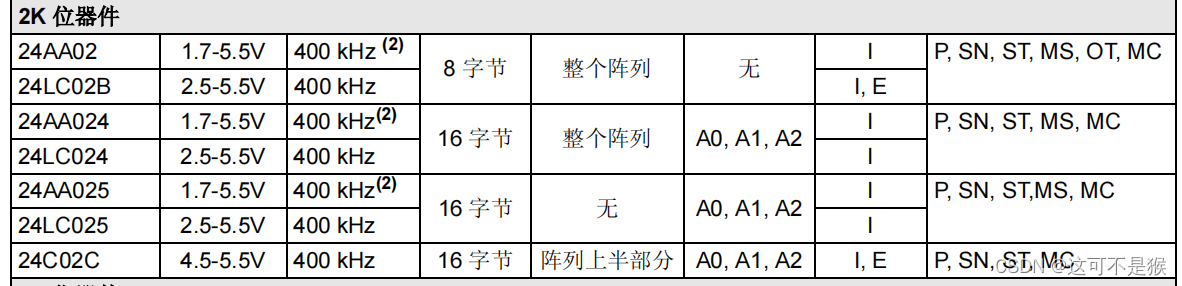
AT24C02是美国微芯科技公司生产的电擦写式只读存储器系列中的一款,其容量为2K位(即256字节)。每一个器件都支持双向、2线数据传输协议;兼容100KHZ(1.7V)和400KHZ(≥2.5V)两种传输速率;擦写次数可达100万次,数据保存时间超过200年等特征。
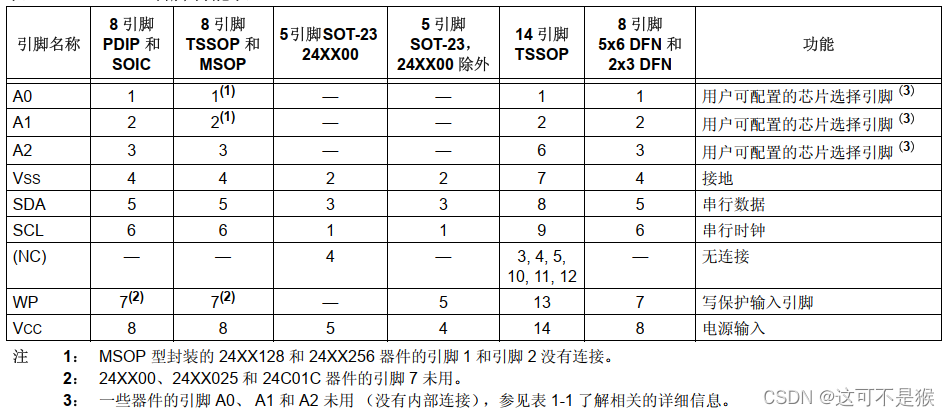
1.1 A0、A1、A2芯片地址输入引脚
在对不同的片选位进行组合之后,连接到同一条总线上的器件最多可达八个(对于MSOP型封装24 xx128和24 xx256器件,最多为两个)。
大部分应用中,片选地址输入引脚A0, A1和A2直接连到逻辑0或逻辑1,对于这些引脚由单片机或其他的可编程器件控制的应用,片选地址输入引脚必须在器件能够继续正常工作之前驱动为逻辑0或逻辑1。
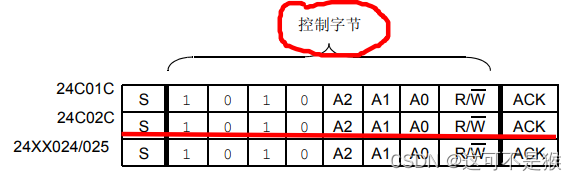
如图2所示,当 这三个地址引脚的电平确定时,对于读写芯片时的控制字节也就确定了。总所周知,IIC是通过设备地址选择芯片的,这三个地址可组成8个不同的设备地址,可供8个器件使用。
1、2 串行通信引脚
串行数据引脚为双向引脚,用于把地址和数据输入/输出器件。该引脚为漏极开路。因此,SDA 总线要求在该引脚与Vcc 之间接入上拉电阻(通常频率为100 kHz时该电阻阻值为10 kΩ,频率为400 kHz和1 MHz时,阻值为2 kΩ)。对于正常的数据传输,只允许在 SCL 为低电平期间改变SDA 电平。而 SDA 电平在 SCL 高电平期间若发生变化,表明起始和停止条件产生。
SCL引脚用于数据传输同步。
1、3 写保护引脚
该引脚必须连接到Vss或者Vcc。如果连接到Vss,写操作使能。如果连接到Vcc,写操作被禁止,但读操作不受影响。
1、4 总线特性
总线空闲:数据线和时钟写同时为高电平;
起始信号:时钟线电平为高电平时,数据线电平由高电平转换为低电平;
停止信号:时钟线电平为高电平时,数据线电平由低电平转换为高电平;
数据有效:数据线的状态表明数据何时有效。在起始条件之后,数据线在时钟处于高电平期间保持稳定,必须在时钟信号为低电平期间改变数据线。一个数据位对应一个时钟脉冲。数据的每次传输以起始条件开始,以停止条件结束。在起始条件和停止条件之间传输的数据字节数目由主器件决定。
1、5 确认信号
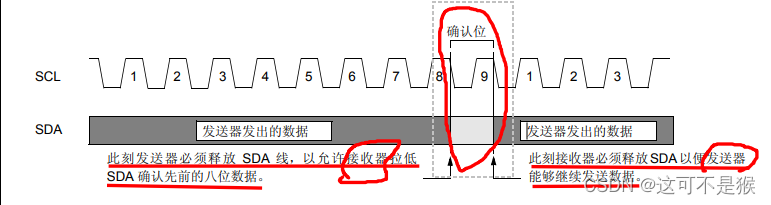
每一个被寻址的接收器在接收到每一字节数据后,应发每个确认位。主器件必须提供一个额外的时钟以传输确认位。写周期期间,24XX不会发出确认信号。
在确认时钟脉冲内,器件确认须拉低 SDA线。在确认时钟的高电平期间,SDA线以这种方式保持稳定的低电还必须考虑建立时间和保持时间。读操作期当然,主器件必须发送·个结束信导给从器件,而不是在火器件输出最后个数据字节之后声生一个确认府i文种情况下,从器件(24XX)将释放数据线为高电平,从而使主器件能够产生停止条件。
2、读写操作
2.1 写操作
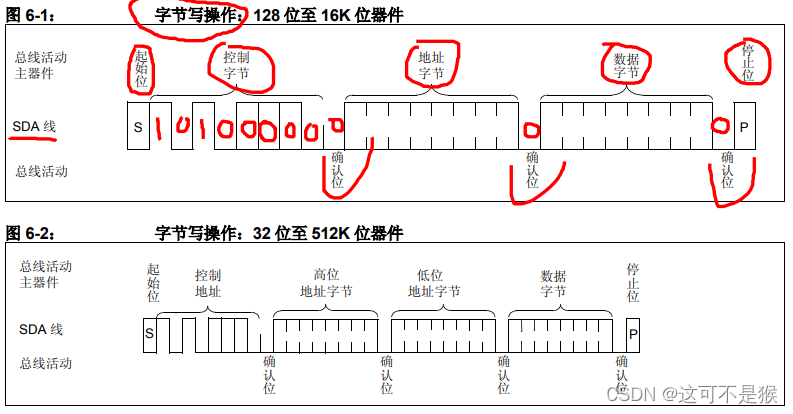
如图4,AT24C02为2K位器件,在写字节时只需按照该步骤先后发送起始信号、控制字节(1010 0000),随后是要写入的地址(AT24C02其实地址可从0开始以255结尾共256字节)、 要写入的一个字节数据、最后发送停止信号。确认位SDA都为低电平。
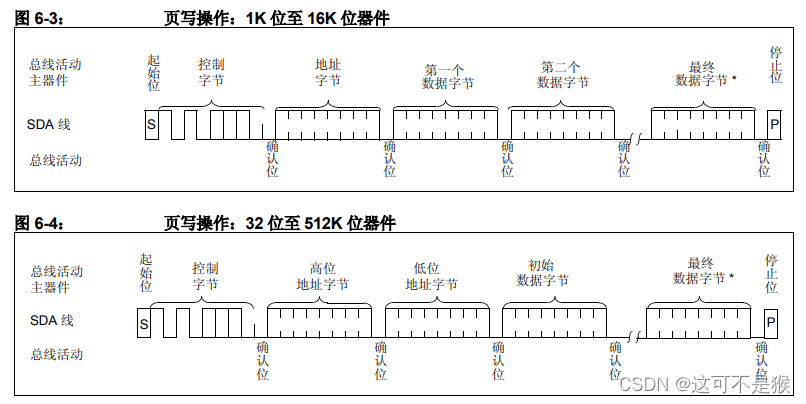
在读写EEPROM时,可以直接用字节写操作对没一个合法地址进行写数据,当然,也可以用页写操作,一次信写一页数据。(页写?一页有多大,可以查看数据手册,也可以通过测试得出,我这里测试一页为8字节)
页写操作和字节写操作相似,只是在发送数据时连着发n个数据,器件每接收到一个字节数据内部地址计数器会自动加1。当数据超过了一页的数据,地址会翻转到页起始地址,之前写入的数据会被覆盖(例如第一页从0~7,当从地址0开始写入9个数据,那么最开始写入地址0的数据将被最后一个数据覆盖)。
2、2 读操作
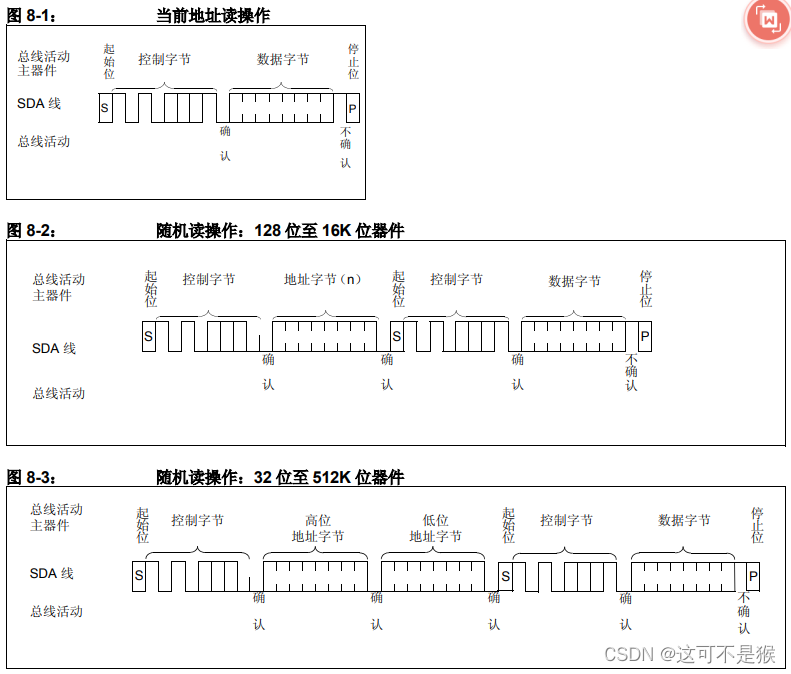
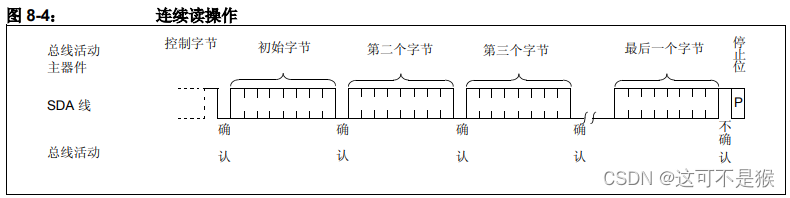
对于读字节操作和连续读操作也是相似,这里只说128位至16K器件。起始信号、控制字节(第一个是写:1010 0000)、地址字节、起始信号、数据字节/n个数据字节(读字节操作和连续读操作的不同点)、停止信号。这里需要注意,停止信号前一位是不确认(高电平),其余的都是确认。连续读没有页读之说,可以一次性读取所有数据。
3、读写案例一(ESP32篇)
3、1 硬件连接
3、2 程序编写
开发环境使用的是Vscode的IDF插件。
注:
#define IIC0_SDA_GPIO_PIN GPIO_NUM_41 //IIC_SDA
#define IIC0_SCL_GPIO_PIN GPIO_NUM_42
#define IIC0_CLK_SPEED 400000 //IIC速率
#define AT24C02_WRITE 0xA0 //写数据控制字节
#define AT24C02_READ 0xA1 //读数据控制字节
#define AT24C02_ACK_EN 0x01
#define AT24C02_ACK_DIS 0x00
3.2.1 AT24C02初始化
AT24C02初始化函数:这里只用到了两个库函数
//1.初始化IIC参数
esp_err_t i2c_param_config(i2c_port_t i2c_num, const i2c_config_t *i2c_conf);
i2c_num:IIC接口,I2C_NUM_0、I2C_NUM_1
i2c_conf:IIC配置结构体
i2c_confjie结构体就不细说了,主要是选择IIC模式,选择IIC引脚(这里SDA为IO_41,SCL为IO_42),SDA和SCL在硬件连接上使用了上拉电阻这里就可不用上拉,随后便是IIC速率400KHZ。
esp_err:返回值,成功返回1
//2.安装IIC驱动
esp_err_t i2c_driver_install(i2c_port_t i2c_num, i2c_mode_t mode, size_t slv_rx_buf_len, size_t slv_tx_buf_len, int intr_alloc_flags);
i2c_num:IIC接口,I2C_NUM_0、I2C_NUM_1
mode:IIC模式选择,主/从,这里选择主模式,后三个参数可以直接写入0。
esp_err:返回值,成功返回1
void AT24C02_Init(void)
{
//配置IIC总线
esp_err_t esp_iic_ret;
i2c_config_t bsp_iicInit={0};
bsp_iicInit.mode = I2C_MODE_MASTER;//IIC主模式
bsp_iicInit.sda_io_num = IIC0_SDA_GPIO_PIN;//选择引脚
bsp_iicInit.scl_io_num = IIC0_SCL_GPIO_PIN;
bsp_iicInit.sda_pullup_en = GPIO_PULLUP_DISABLE;
bsp_iicInit.scl_pullup_en = GPIO_PULLUP_DISABLE;
bsp_iicInit.master.clk_speed = IIC0_CLK_SPEED;
esp_iic_ret=i2c_param_config(I2C_NUM_0,&bsp_iicInit);
if(esp_iic_ret!=ESP_OK)
{
printf("IIC_NUM_0参数配置失败\n");
}
//安装IIC驱动
esp_iic_ret = i2c_driver_install(I2C_NUM_0,I2C_MODE_MASTER,0,0,0);
if(esp_iic_ret!=ESP_OK)
{
printf("IIC_NUM_0驱动安装失败\n");
}
else
{
printf("IIC_NUM_0驱动安装成功\n");
}
}如此,便完成了对IIC的初始化配置。对于ESP32S3的IIC引脚,技术手册中显示可选任意IO。
3.2.2 读字节函数
//1.创建IIC命令链路,在使用IIC前必须创建链路并获取其句柄。
i2c_cmd_handle_t i2c_cmd_link_create(void);
i2c_cmd_handle_t:创建成功返回链路的句柄,内存不足返回NULL,以下函数需要使用该句柄
//2.发送起始信号,使用创建的链路句柄
esp_err_t i2c_master_start(i2c_cmd_handle_t cmd_handle);
//3.发送控制字节0xA0( 1010 0000 ),确认位0
//4.发生EEPROM地址,确认位0
esp_err_t i2c_master_write_byte(i2c_cmd_handle_t cmd_handle, uint8_t data, bool ack_en);
//5.发送起始信号
//6.发送控制字节,这里需要读数据了,所以是0xA1,确认位0
/7.读取字节数据,确认位1
esp_err_t i2c_master_read_byte(i2c_cmd_handle_t cmd_handle, uint8_t *data, i2c_ack_type_t ack);
data:保存读取到的数据。
//8.发送停止信号
esp_err_t i2c_master_stop(i2c_cmd_handle_t cmd_handle);
//9.等待所有命令发送完成,最后删除句柄
esp_err_t i2c_master_cmd_begin(i2c_port_t i2c_num, i2c_cmd_handle_t cmd_handle, TickType_t ticks_to_wait);
i2c_num:IIC接口。
i2c_cmd_handle_t:链路句柄。
ticks_to_wait:阻塞时间。
void i2c_cmd_link_delete(i2c_cmd_handle_t cmd_handle);//删除句柄
/**
* @brief AT24C02随机读取一个字节函数
* @param addr:内存地址0~255(256bety)
* @retval 读取到的数据
*/
uint8_t AT24C02_random_readByte(uint8_t addr)
{
i2c_cmd_handle_t at24c02_i2c_handle;
uint8_t rx_dat=0;
//1.创建连接
at24c02_i2c_handle = i2c_cmd_link_create();
if(at24c02_i2c_handle == NULL)
{
printf("at24c02 IIC命令连接创建失败!\n");
}
//2.发送起始位
i2c_master_start(at24c02_i2c_handle);
//3.发送控制字节
i2c_master_write_byte(at24c02_i2c_handle,AT24C02_WRITE,AT24C02_ACK_DIS);
//4.发送地址字节
i2c_master_write_byte(at24c02_i2c_handle,addr,AT24C02_ACK_DIS);
//5.发送起始地址
i2c_master_start(at24c02_i2c_handle);
//6.发送控制字节
i2c_master_write_byte(at24c02_i2c_handle,AT24C02_READ,AT24C02_ACK_DIS);
//7.读取数据
i2c_master_read_byte(at24c02_i2c_handle,&rx_dat,AT24C02_ACK_EN);
//8.发送停止信号
i2c_master_stop(at24c02_i2c_handle);
//9.删除连接
i2c_master_cmd_begin(I2C_NUM_0,at24c02_i2c_handle,1000);
i2c_cmd_link_delete(at24c02_i2c_handle);
return rx_dat;
}读字节操作这里值得注意的是确认信号(i2c_ack_type_t),在写操作时也注意,只要填写不对可能读写就会出现问题,但是按照数据手册流程来就不会出现啥问题。
3.2.3 连续读
方法一、需要读取多少字节数据就直接调用多少次读字节函数。
方法二、在读取第一个数据后再读取多个数据,注意最后一个数据需要不确认信号。
#if 0
void AT24C02_ContinuousRead_Data(uint8_t addr,uint8_t *data,uint16_t len)
{
uint8_t *pdata = data;
while(len--)
{
*pdata = AT24C02_random_readByte(addr++);
pdata++;
}
}
#else
void AT24C02_ContinuousRead_Data(uint8_t addr,uint8_t *data,uint16_t len)
{
i2c_cmd_handle_t at24c02_i2c_handle;
uint8_t *pdata = data;
//1.创建连接
at24c02_i2c_handle = i2c_cmd_link_create();
if(at24c02_i2c_handle == NULL)
{
printf("at24c02 IIC命令连接创建失败!\n");
}
//2.发送起始位
i2c_master_start(at24c02_i2c_handle);
//3.发送控制字节
i2c_master_write_byte(at24c02_i2c_handle,AT24C02_WRITE,AT24C02_ACK_DIS);
//4.发送地址字节
i2c_master_write_byte(at24c02_i2c_handle,addr,AT24C02_ACK_DIS);
//5.发送起始位
i2c_master_start(at24c02_i2c_handle);
//6.发送控制字节
i2c_master_write_byte(at24c02_i2c_handle,AT24C02_READ,AT24C02_ACK_DIS);
//7.读取数据
while(len--)
{
if(len)
{
i2c_master_read_byte(at24c02_i2c_handle,pdata,AT24C02_ACK_DIS);
}
else
{
i2c_master_read_byte(at24c02_i2c_handle,pdata,AT24C02_ACK_EN);
}
pdata ++;
}
//8.发送停止信号
i2c_master_stop(at24c02_i2c_handle);
//9.删除连接
i2c_master_cmd_begin(I2C_NUM_0,at24c02_i2c_handle,1000);
i2c_cmd_link_delete(at24c02_i2c_handle);
}
#endif3.2.4 写字节
与读字节相似,只不过在发送完地址后,直接开始写字节数据。不确认信号1
void AT24C02_writeByte(uint8_t addr,uint8_t byte)
{
//1.创建连接
i2c_cmd_handle_t at24c02_i2c_handle;
at24c02_i2c_handle = i2c_cmd_link_create();//
if(at24c02_i2c_handle == NULL)
{
printf("at24c02 IIC命令连接创建失败!\n");
}
//2.发送起始位
i2c_master_start(at24c02_i2c_handle);
//3.发送控制字节
i2c_master_write_byte(at24c02_i2c_handle,AT24C02_WRITE,AT24C02_ACK_DIS);
//4.发送地址字节
i2c_master_write_byte(at24c02_i2c_handle,addr%256,AT24C02_ACK_DIS);
//5.发送数据
i2c_master_write_byte(at24c02_i2c_handle,byte,AT24C02_ACK_DIS);
//6.发送停止信号
i2c_master_stop(at24c02_i2c_handle);
//7.删除连接
i2c_master_cmd_begin(I2C_NUM_0,at24c02_i2c_handle,1000);
i2c_cmd_link_delete(at24c02_i2c_handle);
vTaskDelay(5);
}最后需要延时一段时间,可自己调节时间长短,如果不延时就读取数据会出现问题。
3.2.5 页写
ESP32这里提供了一个连续写函数,只需要写入句柄,数据缓冲区,数据长度以及确认信号。
esp_err_t i2c_master_write(i2c_cmd_handle_t cmd_handle, const uint8_t *data, size_t data_len, bool ack_en);
这里的确认信号都是0。也可使用另一个函数一个个写。
void AT24C02_PageWrite_Data(uint8_t addr,uint8_t *data,uint16_t len)
{
uint16_t w_len = len;
uint8_t *pdata = data;
//1.创建连接
i2c_cmd_handle_t at24c02_i2c_handle;
at24c02_i2c_handle = i2c_cmd_link_create();
if(at24c02_i2c_handle == NULL)
{
printf("at24c02 IIC命令连接创建失败!\n");
}
//2.发送起始位
i2c_master_start(at24c02_i2c_handle);
//3.发送控制字节
i2c_master_write_byte(at24c02_i2c_handle,AT24C02_WRITE,AT24C02_ACK_EN);
//4.发送地址字节
i2c_master_write_byte(at24c02_i2c_handle,addr%256,AT24C02_ACK_DIS);
//5.发送数据
i2c_master_write(at24c02_i2c_handle,pdata,w_len,AT24C02_ACK_DIS);
//6.发送停止信号
i2c_master_stop(at24c02_i2c_handle);
//7.删除连接
i2c_master_cmd_begin(I2C_NUM_0,at24c02_i2c_handle,1000);
i2c_cmd_link_delete(at24c02_i2c_handle);
vTaskDelay(10);
}3.2.6 跨页写
方法一、调用多次写字节函数写入多个字节数据。
方法二、调用页写函数,分页写入数据。
#if 0
void AT24C02_WriteData(uint8_t addr,uint8_t *data,uint16_t len)
{
uint8_t *pdata = data;
while(len--)
{
AT24C02_writeByte(addr,*pdata);
pdata ++;
addr ++;
}
}
#else
void AT24C02_WriteData(uint8_t addr,uint8_t *data,uint16_t len)
{
uint8_t page_addr = addr;//保存要写入的页地址
uint8_t page_offset;
uint8_t *pdata = data;
page_offset = 8 - addr%8;//当前页剩余字节数
if(page_offset > len)
{
page_offset = len;//当前页可以写下要写入的数据
}
while(1)
{
AT24C02_PageWrite_Data(page_addr,pdata,page_offset);
if(page_offset == len)
{
break;
}
len -= page_offset;//剩余数据长度
page_addr += page_offset;//地址偏移至下一页起始地址
pdata += page_offset;//数据地址偏移
if(page_addr <= 255)
{
if(len > 8)
{
page_offset = 8;
}
else
{
page_offset = len;
}
}
else
{
break;
}
}
}
#endif在不知道页具体大小时,可使用页写函数写入数据,遇到数据覆盖便可知道页大小。
3.2.7读写实验
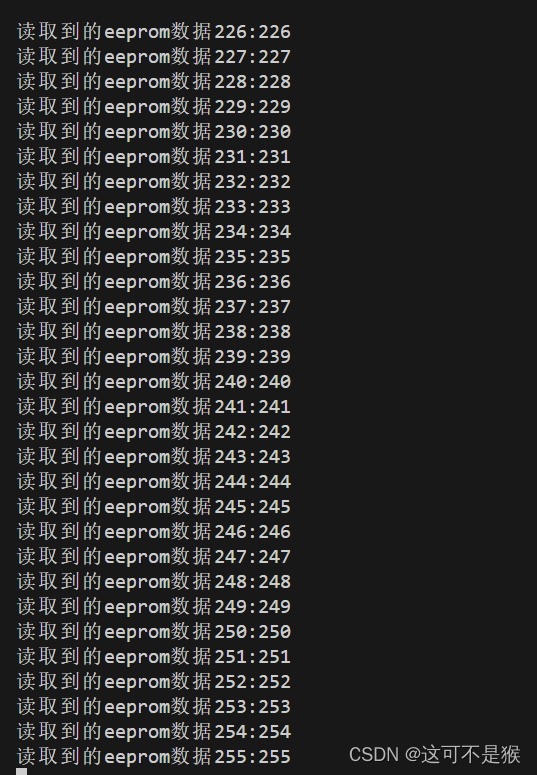
刚开始写的时候建议使用读写字节的两个函数对一个地址进行读写,最终再实现连续读、跨页写函数,这里直接演示读写256字节。
定义两个大小为256字节大小的数组,给tx_dat数组分别赋值0~255,随后将这256个数据从EEPROM的地址0开始写入,再调用连续读函数从地址0开始读取256字节数据并打印。输出结果如图8所示,打印数据与写入数据相同。
void app_main(void)
{
esp_err_t ret;
ret = nvs_flash_init(); /* 初始化NVS */
if (ret == ESP_ERR_NVS_NO_FREE_PAGES || ret == ESP_ERR_NVS_NEW_VERSION_FOUND)
{
ESP_ERROR_CHECK(nvs_flash_erase());
ret = nvs_flash_init();
}
led_init(); /* 初始化LED */
KEY_Init(); /* 初始化KEY_BOOT*/
AT24C02_Init();
printf("AT24C02测试开始!\n");
uint8_t tx_dat[256]={0};
uint8_t rx_dat[256]={0};
for(uint16_t i=0;i<=255;i++)
{
tx_dat[i]=i;
}
AT24C02_WriteData(0,tx_dat,256);//跨页写256字节数据
AT24C02_ContinuousRead_Data(0,rx_dat,256);//连续读取256字节数据
for(uint16_t i=0;i<=255;i++)
{
printf("读取到的eeprom数据%d:%d\n",i,rx_dat[i]);
}
while(1)
{
if(KEY_get_val())
{
LED_TOGGLE();
printf("按键boot按下!\n");
}
vTaskDelay(100);
}
}输出演示:
3.2.8 页大小实验
器件选择表中已经给出了器件的页大小,当然再不确定芯片型号的情况下也可以进行实验。
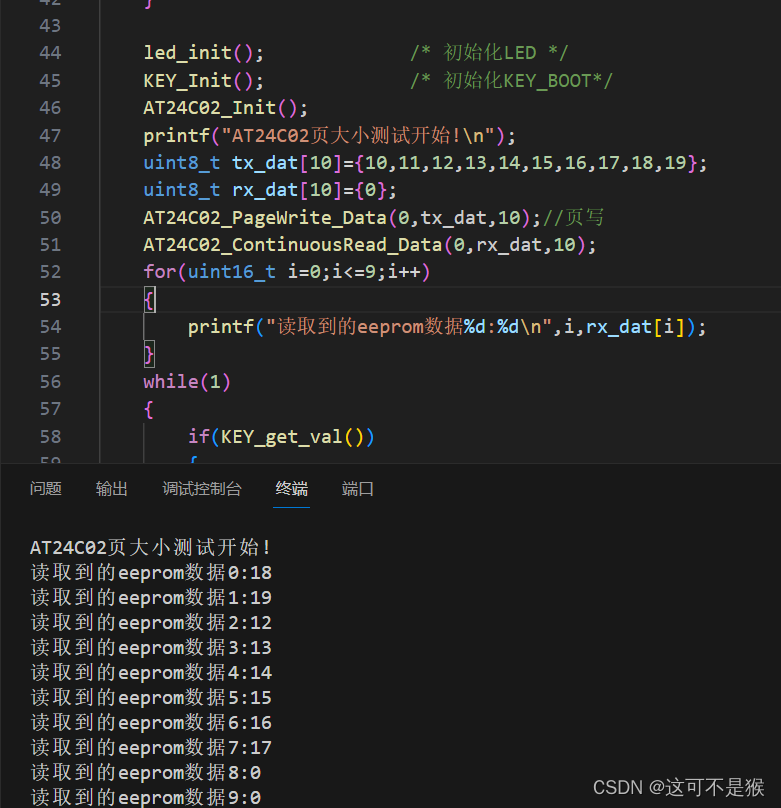
如图10所示,在实验前,可调用跨页写函数将EEPROM清零,然后再进行测试,这里定义10个数据保存在数组tx_dat中,调用页写函数将数据写入EEPROM,再用连续读函数读取数据。可见从地址0~9这10个地址中都读取到了数据,地址8、9中的数据为0,且地址0、1的数据被18、19覆盖了。
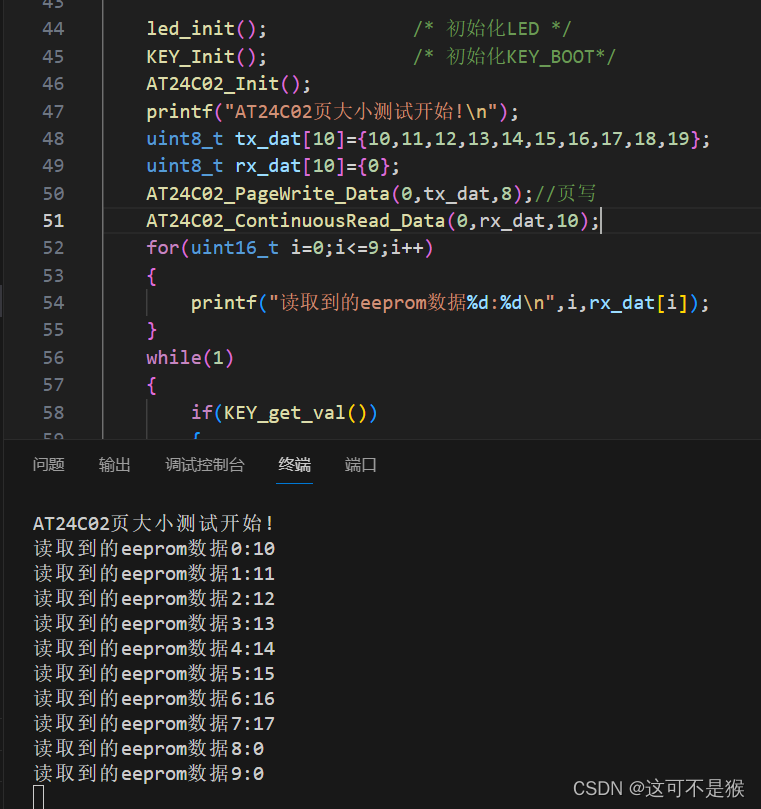
如图11,在地址0页写入8个数据,在连续读取10个数据,可见地址0~7这8个地址的数据和预期写入的数据相同。由此可见页大小为8字节,第一页为0~7,依次类推,便可由此编写跨页写函数。
4、读写案例二(STM32篇)
暂略
5、资料
链接:https://pan.baidu.com/s/1W0P_VgRDLnq7g2Oy_dNmOA?pwd=1234 