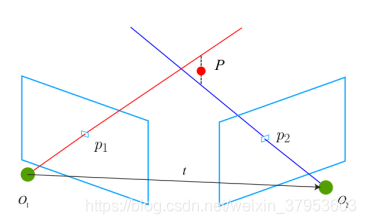
问题描述:
考虑某个路标点
y
y
y(上图的P)被若干关键帧
k
=
1
,
2
…
n
\mathrm{k}=1,2 \ldots \mathrm{n}
k=1,2…n(上图的O)看到。
其中,
y
∈
R
4
y \in \mathbb{R}^{4}
y∈R4取齐次坐标,即
y
=
[
x
,
y
,
z
,
1
]
T
y=[x, y, z, 1]^{T}
y=[x,y,z,1]T。每次观测为
x
k
=
[
u
k
,
v
k
,
1
]
T
x_{k}=\left[u_{k}, v_{k}, 1\right]^{T}
xk=[uk,vk,1]T,取相机归一化平面坐标(这样可以忽略内参)。
记世界系到相机系的投影矩阵为
P
k
=
[
R
k
,
t
k
]
∈
R
3
×
4
P_{k}=\left[R_{k}, t_{k}\right] \in \mathbb{R}^{3 \times 4}
Pk=[Rk,tk]∈R3×4。
投影关系:
∀
k
,
λ
k
x
k
=
P
k
y
\forall \mathrm{k}, \lambda_{\mathrm{k}} \mathrm{x}_{\mathrm{k}}=\mathrm{P}_{\mathrm{k}} \mathrm{y}
∀k,λkxk=Pky
其中观测点深度值
λ
k
\lambda_{\mathrm{k}}
λk未知
将投影关系写开:
{
λ
k
u
k
=
p
k
,
1
y
=
[
R
k
,
1
∣
t
k
,
1
]
[
x
,
y
,
z
,
1
]
T
λ
k
v
k
=
p
k
,
2
y
=
[
R
k
,
2
∣
t
k
,
2
]
[
x
,
y
,
z
,
1
]
T
λ
k
=
p
k
,
3
y
=
[
R
k
,
3
∣
t
k
,
3
]
[
x
,
y
,
z
,
1
]
T
\left\{\begin{array}{l}\lambda_{k} u_{k}=p_{k, 1} y=\left[R_{k, 1} \mid t_{k, 1}\right][x, y, z, 1]^{T} \\\lambda_{k} v_{k}=p_{k, 2} y=\left[R_{k, 2} \mid t_{k, 2}\right][x, y, z, 1]^{T} \\\lambda_{k}=p_{k, 3} y=\left[R_{k, 3} \mid t_{k, 3}\right][x, y, z, 1]^{T}\end{array}\right.
⎩⎨⎧λkuk=pk,1y=[Rk,1∣tk,1][x,y,z,1]Tλkvk=pk,2y=[Rk,2∣tk,2][x,y,z,1]Tλk=pk,3y=[Rk,3∣tk,3][x,y,z,1]T
其中为的第一行,容易发现第三式可以带入上两个式子,将深度值消元。
{
p
k
,
3
y
u
k
=
p
k
,
1
y
p
k
,
3
y
v
k
=
p
k
,
2
y
\left\{\begin{array}{l}p_{k, 3} y u_{k}=p_{k, 1} y \\p_{k, 3} y v_{k}=p_{k, 2} y\end{array}\right.
{pk,3yuk=pk,1ypk,3yvk=pk,2y
化简得:
{
(
p
k
,
3
u
k
−
p
k
,
1
)
y
=
0
(
p
k
,
3
v
k
−
p
k
,
2
)
y
=
0
\left\{\begin{array}{l}\left(p_{k, 3} u_{k}-p_{k, 1}\right) y=0 \\\left(p_{k, 3} v_{k}-p_{k, 2}\right) y=0\end{array}\right.
{(pk,3uk−pk,1)y=0(pk,3vk−pk,2)y=0
由于我们现在要求解
y
=
[
x
,
y
,
z
,
1
]
T
y=[x, y, z, 1]^{T}
y=[x,y,z,1]T,有三个未知数,上面两个方程是不够的,至少得多一个观测(当然多几个观测结果是一样的):
{
(
p
1
,
3
u
k
−
p
1
,
1
)
y
=
0
(
p
1
,
3
v
k
−
p
1
,
2
)
y
=
0
(
p
2
,
3
u
k
−
p
2
,
1
)
y
=
0
(
p
2
,
3
v
k
−
p
2
,
2
)
y
=
0
\left\{\begin{array}{l}\left(p_{1,3} u_{k}-p_{1,1}\right) y=0 \\\left(p_{1,3} v_{k}-p_{1,2}\right) y=0 \\\left(p_{2,3} u_{k}-p_{2,1}\right) y=0 \\\left(p_{2,3} v_{k}-p_{2,2}\right) y=0\end{array}\right.
⎩⎪⎪⎨⎪⎪⎧(p1,3uk−p1,1)y=0(p1,3vk−p1,2)y=0(p2,3uk−p2,1)y=0(p2,3vk−p2,2)y=0
整合得:
[
p
1
,
3
u
k
−
p
1
,
1
p
1
,
3
v
k
−
p
1
,
2
p
2
,
3
u
k
−
p
2
,
1
p
2
,
3
v
k
−
p
2
,
2
]
[
y
]
=
0
⇒
D
y
=
0
\left[\begin{array}{l}p_{1,3} u_{k}-p_{1,1} \\p_{1,3} v_{k}-p_{1,2} \\p_{2,3} u_{k}-p_{2,1} \\p_{2,3} v_{k}-p_{2,2}\end{array}\right][y]=0 \Rightarrow D y=0
⎣⎢⎢⎡p1,3uk−p1,1p1,3vk−p1,2p2,3uk−p2,1p2,3vk−p2,2⎦⎥⎥⎤[y]=0⇒Dy=0
y为D零空间的一个非零元素。本来就是三个未知数,这时来了四个方程,系数矩阵必不满秩(在丁点噪声都没有的情况下,也就是上图红蓝线相交)。
若对D的SVD分解,
D
=
U
Σ
V
T
\mathrm{D}=\mathrm{U} \Sigma \mathrm{V}^{\mathrm{T}}
D=UΣVT,
Σ
\Sigma
Σ为矩阵D特征值由大到小的组成的对角矩阵。挪一下位置,实际上是
D
V
=
U
Σ
\mathrm{DV}=\mathrm{U} \Sigma
DV=UΣ,如果将上述结果
D
y
=
0
\mathrm{Dy}=0
Dy=0,对应地放入SVD分解的式子中。
D
[
v
1
…
y
]
=
U
[
σ
1
⋯
0
⋮
⋱
⋮
0
…
0
]
\mathrm{D}\left[\mathrm{v}_{1} \quad \ldots \quad \mathrm{y}\right]=\mathrm{U}\left[\begin{array}{ccc}\sigma_{1} & \cdots & 0 \\\vdots & \ddots & \vdots \\0 & \ldots & 0\end{array}\right]
D[v1…y]=U⎣⎢⎡σ1⋮0⋯⋱…0⋮0⎦⎥⎤
显而易见,我们求解y只要对D做SVD分解,再取V矩阵的最后一维即可。But……实际操作上,我们会对做奇异值分解(这就成了特征值分解了阿),同样取V的最后一维。
D
T
D
=
(
U
Σ
V
T
)
T
U
Σ
V
T
=
V
Σ
T
U
T
U
Σ
V
T
=
V
(
Σ
T
Σ
)
V
T
D^{T} D=\left(U \Sigma V^{T}\right)^{T} U \Sigma V^{T}=V \Sigma^{T} U^{T} U \Sigma V^{T}=V\left(\Sigma^{T} \Sigma\right) V^{T}
DTD=(UΣVT)TUΣVT=VΣTUTUΣVT=V(ΣTΣ)VT
一开始,我也很迷,为啥要算,分明算D就行了。认识太薄弱了,然后去b站学习了,MIT还有3b1b。
视频参考(MIT),这就明明白白:SVD分解
发现老师是这么讲的,我们用手算的过程也是这么算的,关键还是我代码这样运行是比较快的,哈哈哈。
另外,由于噪声的存在,D矩阵经常是满秩,这样我们原来假设零空间里的y就不存在了。因此在解SVD的时候,我们还要判断奇异值的
σ
3
>
>
σ
4
\sigma_{3}>>\sigma_{4}
σ3>>σ4是否成立。若不成立,这意味着则三角测量是失败的,我们则要增加观测。
为什么要增加观测呢?我自己理解哈,噪声是服从零均值的高斯分布的(这是不是又太理想了,哈哈哈),只要你采样多了,这个“零”就会显现了,反之少的时候,一下子就把你带偏了;另外“多次实验得出普遍真理”嘛~

碎碎念:投影矩阵实际上就是相机的位姿变换。我们定第一帧坐标与世界坐标重合,根据上回说到的极对约束,我们根据匹配点,求解得第一帧与第二帧相机运动关系。同时这些匹配点,根据定义的第一帧与世界坐标重合,确定了点的世界坐标。在通过PNP等即可生成往后连续的位姿。这样说来,投影矩阵P所有是已知的。(我们用路标点求解位姿,又返回来用位姿去优化路标点的“深度”,形成一个“闭环”)
文为小记,但若有不当之处,还望赐教!
参考及盗图:深蓝学院vio,MIT线代,3b1b,十四讲