前面配合我司自然拼读phonics产品做了52个字母的定位识别,后面看vuforia AR里有根据图片制作特征图,试了下,用生成特征矩阵的方式更简单高效(无需生成训练图集)。当然能使用特征矩阵的图片是有限制的就是特征足够多,像我们这种色块/字母等的就不行了。
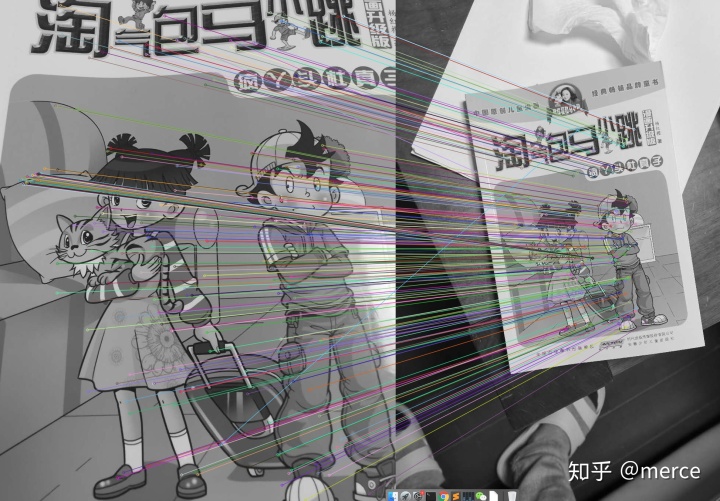
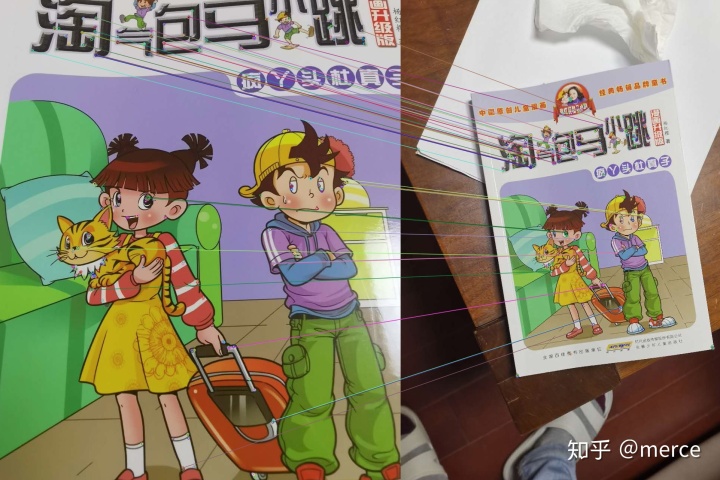
回忆起之前可以根据绘本封面图片找绘本的应用,觉得值得研究下opencv特征提取的方法,和机器学习的方法互为补充。
用了3种方法:
第一种是Hessian Affine detector with SIFT descriptor(https://github.com/perdoch/hesaff) 这个用的opencv太老了,一个开发者(https://github.com/ray0809/Hessian_sift)更新了下,可以在opencv 3.x上跑了,可以直接用后者提供的代码(demo_python.py)做对比图实验。
第二种方法用opencv自带的surf方法:
import numpy as np
import cv2 as cv
import time
path1 = '../Hessian_sift-master/test_pics/204.jpg'
path2 = '../Hessian_sift-master/test_pics/205.jpg'
img1 = cv.imread(path1,0)
img2 = cv.imread(path2,0)
minHessian = 5000
detector = cv.xfeatures2d_SURF.create(hessianThreshold=minHessian)
start_time = time.time()
keypoints1, descriptors1 = detector.detectAndCompute(img1, None)
count = len(keypoints1)
print("Detected {:.5f} points, in {:.5f} sec.".format(count, time.time() - start_time))
keypoints2, descriptors2 = detector.detectAndCompute(img2, None)
count = len(keypoints2)
print("Detected {:.5f} points, in {:.5f} sec.".format(count, time.time() - start_time))
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks = 20) #指定递归次数
begin = time.time()
flann = cv.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(descriptors1, descriptors2, k=2)
# Need to draw only good matches, so create a mask
matchesMask = [[0, 0] for i in range(len(matches))]
del_same = []
mat = 0
for i, (m, n) in enumerate(matches):
# ratio test as per Lowe's paper
if m.distance < 0.5 * n.distance:
mat += 1
matchesMask[i] = [1, 0]
del_same.append(m.trainIdx)
count = len(set(del_same))
print('匹配耗时:{:.5f}, 匹配到的点个数:{}'.format(time.time() - begin, count))
draw_params = dict(#matchColor = (0, 255, 0),
#singlePointColor = (255, 0, 0),
matchesMask = matchesMask,
flags = cv.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS #0
)
img3 = cv.drawMatchesKnn(img1, keypoints1, img2, keypoints2, matches, None, **draw_params)
cv.namedWindow('img',cv.WINDOW_AUTOSIZE)
cv.imshow('img',img3)
cv.waitKey(0)
cv.destroyAllWindows()
运行:minHessian = 5000的结果:
(base) panyongengde:orb_demo panyongfeng$ python demo_surf.py
Detected 1482.00000 points, in 0.30609 sec.
Detected 794.00000 points, in 0.52564 sec.
匹配耗时:0.05584, 匹配到的点个数:60看性能和结果,和第一种方法基本一致(minHessian取400),特征提取大概在100-200毫秒级,

第三种方法 orb的方法,特征提取快一个量级:
import numpy as np
import cv2 as cv
import time
path1 = '../Hessian_sift-master/test_pics/204.jpg'
path2 = '../Hessian_sift-master/test_pics/205.jpg'
img1 = cv.imread(path1,1)
img2 = cv.imread(path2,1)
# Initiate ORB detector
orb = cv.ORB_create()
# find the keypoints with ORB
start_time = time.time()
kp1, des1 = orb.detectAndCompute(img1,None)
count = len(kp1)
print("Detected {:.5f} points, in {:.5f} sec.".format(count, time.time() - start_time))
start_time = time.time()
kp2, des2 = orb.detectAndCompute(img2,None)
count = len(kp2)
print("Detected {:.5f} points, in {:.5f} sec.".format(count, time.time() - start_time))
start_time = time.time()
bf = cv.BFMatcher(cv.NORM_HAMMING, crossCheck=True)
matches = bf.match(des1,des2)
print("Matches in {:.5f} sec.".format(time.time() - start_time))
matches = sorted(matches, key = lambda x:x.distance)
good = []
for match in matches:
if match.distance < 40:
good.append(match)
print(len(good))
#img3 = cv.drawMatches(img1,kp1,img2,kp2,good,None,flags=cv.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
img3 = cv.drawMatches(img1,kp1,img2,kp2,good,None,flags=0)
cv.namedWindow('img',cv.WINDOW_AUTOSIZE)
cv.imshow('img',img3)
cv.waitKey(0)
cv.destroyAllWindows()
运行:
(base) panyongengde:orb_demo panyongfeng$ python demo_orb.py
Detected 500.00000 points, in 0.05798 sec.
Detected 500.00000 points, in 0.02815 sec.
Matches in 0.00221 sec.
43
感觉都达到了要求,orb速度高,端内可完成实时运算。