🚀write in front🚀
🔎大家好,我是黄桃罐头,希望你看完之后,能对你有所帮助,不足请指正!共同学习交流
🎁欢迎各位→点赞👍 + 收藏⭐️ + 留言📝💬本系列哔哩哔哩江科大STM32的视频为主以及自己的总结梳理📚
🚀Projeet source code🚀
💾工程代码放在了本人的Gitee仓库:iPickCan (iPickCan) - Gitee.com
引用:
STM32入门教程-2023版 细致讲解 中文字幕_哔哩哔哩_bilibili
Keil5 MDK版 下载与安装教程(STM32单片机编程软件)_mdk528-CSDN博客
STM32之Keil5 MDK的安装与下载_keil5下载程序到单片机stm32-CSDN博客
0. 江协科技/江科大-STM32入门教程-各章节详细笔记-查阅传送门-STM32标准库开发_江协科技stm32笔记-CSDN博客
【STM32】江科大STM32学习笔记汇总(已完结)_stm32江科大笔记-CSDN博客
江科大STM32学习笔记(上)_stm32博客-CSDN博客
STM32学习笔记一(基于标准库学习)_电平输出推免-CSDN博客
术语:
| 英文缩写 | 描述 |
| GPIO:General Purpose Input Onuput | 通用输入输出 |
| AFIO:Alternate Function Input Output | 复用输入输出 |
| AO:Analog Output | 模拟输出 |
| DO:Digital Output | 数字输出 |
| 内部时钟源 CK_INT:Clock Internal | 内部时钟源 |
| 外部时钟源 ETR:External Trigger | 时钟源 External 触发 |
| 外部时钟源 ETR:External Trigger mode 1 | 外部时钟源 External 触发 时钟模式1 |
| 外部时钟源 ETR:External Trigger mode 2 | 外部时钟源 External 触发 时钟模式2 |
| 外部时钟源 ITRx:Internal Trigger inputs | 外部时钟源,ITRx (Internal trigger inputs)内部触发输入 |
| 外部时钟源 TIx:exTernal Input pin | 外部时钟源 TIx (external input pin)外部输入引脚 |
| CCR:Capture/Comapre Register | 捕获/比较寄存器 |
| OC:Output Compare | 输出比较 |
| IC:Input Capture | 输入捕获 |
| TI1FP1:TI1 Filter Polarity 1 | Extern Input 1 Filter Polarity 1,外部输入1滤波极性1 |
| TI1FP2:TI1 Filter Polarity 2 | Extern Input 1 Filter Polarity 2,外部输入1滤波极性2 |
| DMA:Direct Memory Access | 直接存储器存取 |
正文:
0. 概述
从 2024/06/12 定下计划开始学习下江协科技STM32课程,接下来将会按照哔站上江协科技STM32的教学视频来学习入门STM32 开发,本文是视频教程 P2 STM32简介一讲的笔记。
1.🚢第一个代码-串口发送
接线图:

注意:USB转串口的模块上面的跳线帽要插在VCC和3V3这两个引脚上,选择通信的TTL电平为3.3V。然后通信引脚TXD和RXD要接在STM32的PA9和PA10口,为什么是这两个口?查引脚定义表可得。

- 🤠这里看到USART1的TX是PA9,RX是PA10,我们计划用USART1进行通信,所以就选这两个脚。
- 🤠还要注意一个问题,TX和RX一定要交叉连接,比如这里PA9是STM32的TX,那么它要接的就是串口模块的RX接收,然后串口模块的TX发送要接在STM32的PA10,也就是RX接收。外。
- 🤠然后两个设备之间要把负极接在一起,进行共地。
一般多个系统之间互联都要进行共地,这样电平才能有高低的参考。就像两个人比身高一样,他俩必须要站在同一地平面上才能比较。如果一个人站在地球,一个人站在月球,那怎么知道谁高谁低?这就是共地的问题。
最后这个串口模块和STLINK或者USB串口都要插在电脑上,这样STM32和串口模块都有独立供电。所以这里通信的电源正极就不需要接了,直接三根线就行。
我们第一个代码只有STM32发送的部分,所以通讯线只有这个发送的有用,另一根线第一个代码没有用的,暂时可以不接。
在我们下一个串口发送加接收的代码,两根通信线就都需要接了。所以我们把这两根通信线一起都接上,这样两个代码的经线图是一模一样的。
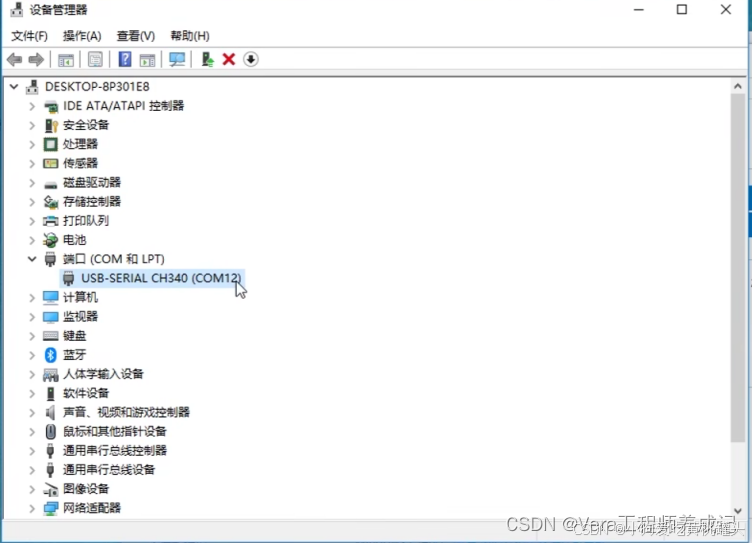
连好线后,回到电脑端,此电脑-右键-属性-打开设备管理器,确保串口的驱动没问题,在这个端口目录下,可以看到有这个CH340的驱动,如果出现了COM号,并且前面图标没有感叹号,那就证明串口驱动没问题,否则的话需要安装一下串口模块的驱动(如需要安装串口驱动可以看江科大的第二节视频)。
初始化串口的步骤
初始化串口的步骤看这个基本结构图。
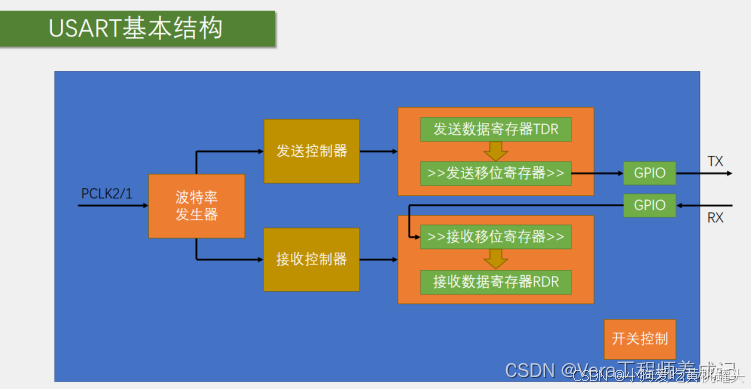
第一步,开启时钟,把需要用的USART和GPIO的时钟打开。
第二步,GPIO初始化,把TX配置成复用输出,RX配置成输入。
第三步,配置USART,直接使用一个结构体,就可以把这里所有的参数都配置好了。
第四步,开关控制,如果只需要发送的功能,就直接开启USART初始化就结束了。如果需要接收的功能,可能还需要配置中断。那就在开启USART之前,再加上ITConfig和NVIC的代码就行了。
初始化完成之后,如果要发送数据,调用一个发送函数就行了。如果要接收数据,就调用接收的函数。如果要获取发送和接收的状态,就调用获取标志位的函数,这就是USART外设的使用思路。
USART的库函数
打开usart.h,拖到最后

这三个初始化函数大家应该都很熟悉了,不用说了
USART_ClockInit和USART_ClockStructInit

这两个函数是用来配置同步时钟输出的。包括时钟是不是要输出,时钟的极性、相位等参数,因为参数也比较多,所以也是用结构体这种方式来配置的,需要时钟输出的话可以了解一下这两个函数。
USART_Cmd 和 USART_ITConfig

这两个函数应该也很熟悉了。
USART_DMACmd
这个可以开启USART到DMA的触发通道,需要用DMA的话可以了解一下。
USART_SendData和USART_ReceiveData

这两个函数在我们发送和接收的时候会用到。SendData就是写DR寄存器,ReceiveData就是读DR寄存器。DR寄存器内部有四个寄存器,控制发送与接收,执行细节。我们上一小节已经分析过了,这里程序上就非常简单,写DR就是发送,读DR就是接收。至于怎么产生波形,怎么判断输入,软件一概不管。
四个标志位相关的函数

代码实现
Serial.c
第一步,开启时钟

第二步,GPIO初始化
选择引脚模式,TX引脚是USART外设控制的输出脚。所以要选复用推挽输出,RX引脚是USART外设数据输入脚,所以要选择输入模式,输入模式并不分什么普通输入复用输入,一根线只能有一个输出,但可以有多个输入,所以对于输入脚,外设和GPIO都可以同时用。一般RX配置是浮空输入或者上拉输入,因为串口波形空闲状态是高电平,所以不使用下拉输入。
引脚模式如果不清楚的话,还是看一下手册GPIO那一节有个推荐的配置表,可以参考一下。

我们第一个程序只需要数据发送,所以只初始化TX就行。

第三步,配置USART
定义结构体,列出结构体成员,选择每个成员的取值,调用USART_Init函数初始化USART。
第一个成员是波特率,写9600,写完之后,这个USART_Init函数内部会自动算好9600对应的分频系数。然后写到BRR寄存器,计算步骤上节讲过。
😎😎技巧:查找每个成员的取值时,可以把成员变量名复制放到等号右边,按CTRL+ALT+空格联想,就能看到取值的列表,如果没有那可能这个成员的取值是要自己写的,可以右键跳转到定义看看。
第二个成员是硬件流控制,它的取值列表
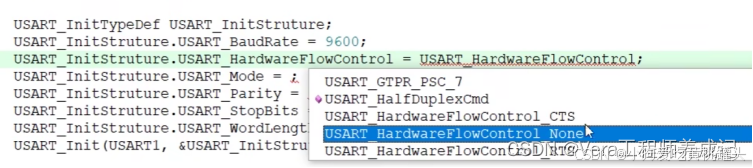
None不使用流控,只用CTS,只用RTS,或者CTS、RTS都使用

我们不使用流控,所以选择None。
第三个成员是串口模式,取值可以选择TX发送模式和RX接收模式。如果你既需要发送,又需要接收,那就用或符号把TX和RX或起来。我们这个程序只需要发送功能,所以就选择TX这一个参数就行。
第四个成员是校验位,取值是
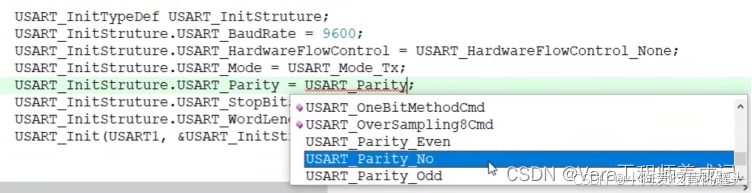
检验位可以选择NO无校验,Odd奇校验,Even偶校验,我们不需要校验,所以选择NO。
第五个成员是停止位,取值可以是
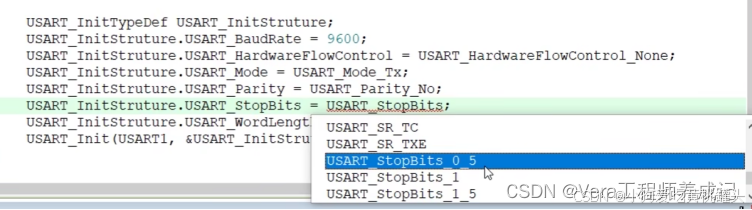
我们选择1位停止位.
第六个成员是字长,可以选择八位或九位,我们不需要校验,所以字长就选择八位。
到这里,我们结构体参数的初始化就完成了。

第四步,开关控制

发送数据的函数
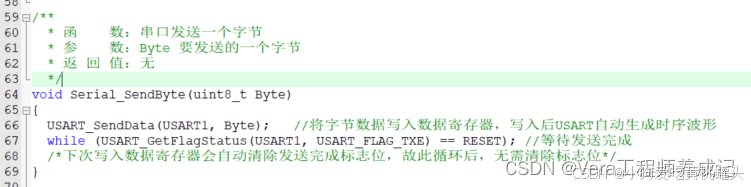
接下来我们来写一个发送数据的函数Serial_SendByte,调用这个函数,就可以从TX引脚发送一个字节数据。
在这里面我们需要调用串口的USART_SendData函数,参数第一个给USART1,第二个给Byte。
这个函数的内部是这样的,把我们传的Byte给它的Data
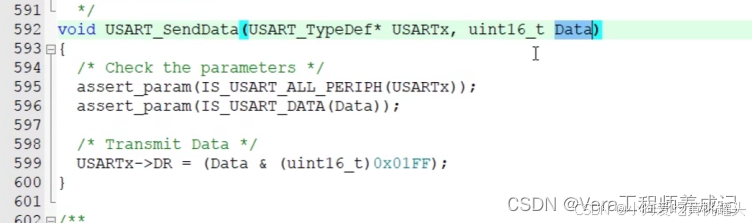
Data与上01FF就是把无关的高位清零。然后直接赋值给DR寄存器,因为这是写入DR,所以数据最终通向TDR发送数据寄存器,TDR再传递给发送移位寄存器,最后一位一位地把数据移出到TX引脚,完成数据的发送。
调用函数,Byte变量就写入到TDR了。

写完之后,我们还需要等待一下,等TDR的数据转移到移位寄存器了,我们才能放心。要不然如果数据还在TDR进行等待,我们再写入数据,就会产生数据覆盖。所以在发送之后,我们还需要等待一下标志位,在这里调用USART_GetFlagStatus函数,这个函数的第二个参数可以选择
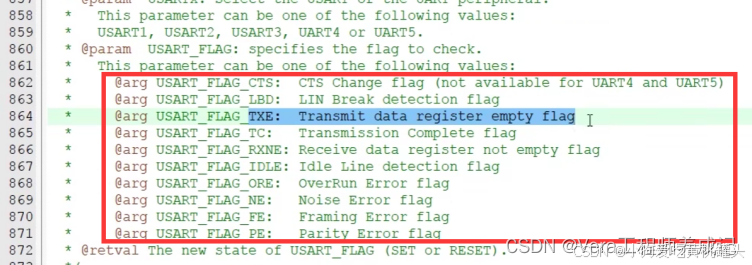
我们需要使用这个TXE发送数据寄存器空标志位复制。然后我们要等待TXE置1。
然后是标志位是否需要手动清除的问题,这个可以看一下手册
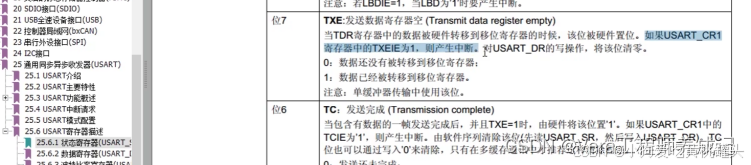
所以说这里标志位置1之后,不需要手动清零。当我们下一次再写入Data时,这个标志位会自动清零。
那这样我们这个Serial_SendByte函数就完成了,
如果需要测试这个发送部分的功能,则主函数里可以写这样写
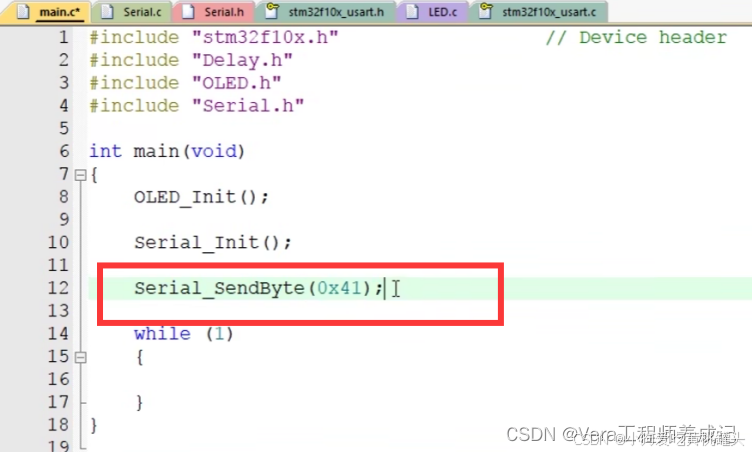
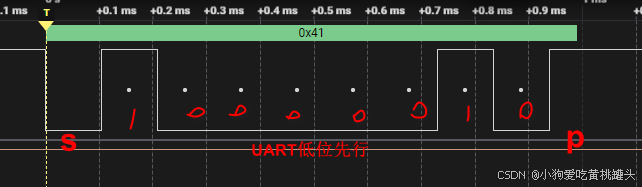
调用这个函数之后,TX引脚就会产生一个0x41对应的波形。这个波形可以发送给其他支持串口的模块,也可以通过USB转串口模块发送到电脑端。
我们本节主要是和电脑通信,所以是在电脑端接收数据。
测试的时候别忘记将以上函数放在头文件中声明一下。
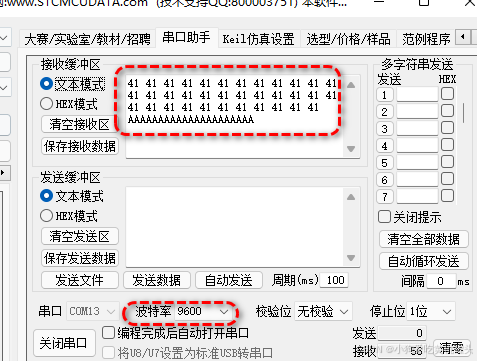
那我们编译下载后,我们按一下复位键。这时可以看到串口模块的接收指灯闪了一下,说明有波形发过来了。
那在电脑端我们需要打开串口助手软件,来查看接收到的数据。
串口助手软件领取链接
链接:https://pan.baidu.com/s/1ASVoP_LLIPUQ91fJ4dz6vw
提取码:hm48
UART.c
#include "stm32f10x.h" // Device header
#include "Uart.h"
void UART_Init(void)
{
//RCC使能外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //RCC使能UART时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //RCC使能GPIOA时钟
//配置GPIO
GPIO_InitTypeDef gpioInitStructure;
gpioInitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO为复用推挽输出模式
gpioInitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOA_Pin9为UART1_Tx
gpioInitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpioInitStructure);
//配置UART
USART_InitTypeDef USART_InitStruct;
USART_StructInit(&USART_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //不使用UART硬件流控
USART_InitStruct.USART_Mode = USART_Mode_Tx; //UART使能Tx发送
USART_InitStruct.USART_Parity = USART_Parity_No; //UART无奇偶校验
USART_InitStruct.USART_StopBits = USART_StopBits_1; //1位停止位
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
//使能UART
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t data)
{
USART_SendData(USART1, data);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待UART TXE标志位
//写入之后等待TXE标志位置1,表示数据从TDR寄存器转移到了发送移位寄存器
//如果不等待TDR数据移动到发送移位寄存器,下次写时就会覆盖上一次数据
//该标志位在写DR寄存器时自动清除
}
UART.h
#ifndef __UAART_H__
#define __UAART_H__
void UART_Init(void);
void Serial_SendByte(uint8_t data);
#endif
Main.c
#include "stm32f10x.h" // Device header
#include "oled.h"
#include "Countersensor.h"
#include "Encoder.h"
#include "Timer.h"
#include "AD.h"
#include "Delay.h"
#include "MyDMA.h"
#include "UART.h"
extern uint16_t Num;
int main(int argc, char *argv[])
{
OLED_Init();
OLED_ShowString(1, 1, "UART");
UART_Init();
Serial_SendByte(0x41);
Serial_SendByte(0x55);
while(1)
{
}
return 1;
}
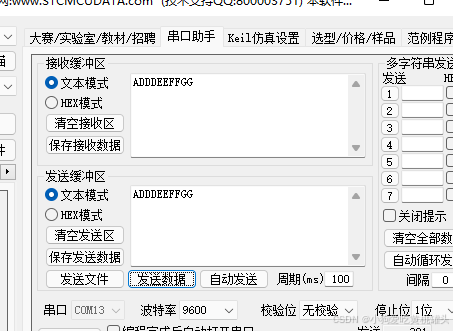
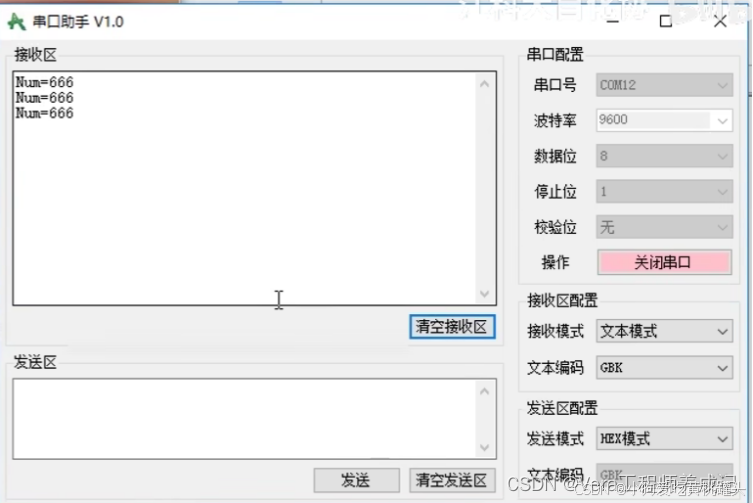
注意:串口助手上的串口号要和设备管理器上显示的串口号一致。并且串口助手上的参数也必须和我们代码中配置的一致。
串口助手上的参数配置好后,选择打开串口,然后串口助手就准备就绪,此时在USB转串口模块上按一下复位键,就能在串口助手上的接收区看到数据了。
使用淘宝购买的19块钱的24MHz逻辑分析仪抓下报文:
逻辑分析抓取到的STM32 UART发送 0x41 的波形,字长8位,无奇偶校验位,1个停止位
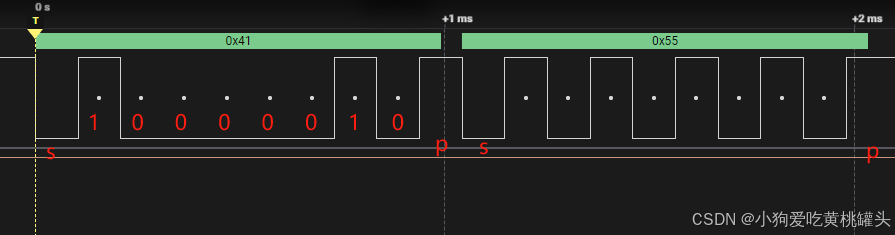
逻辑分析抓取到的STM32 UART发送 0x41, 0x55 两个字符的波形,字长8位,无奇偶校验位,1个停止位
使用9位字长,1个奇校验位,1个停止位。 逻辑分析抓取到的STM32 UART发送 0x41,0x40, 0x55 三个字符的波形,字长8位,无奇偶校验位,1个停止位
//配置UART
USART_InitTypeDef USART_InitStruct;
USART_StructInit(&USART_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //不使用UART硬件流控
USART_InitStruct.USART_Mode = USART_Mode_Tx; //UART使能Tx发送
//USART_InitStruct.USART_Parity = USART_Parity_No; //UART无奇偶校验
USART_InitStruct.USART_Parity = USART_Parity_Odd; //UART奇校验
USART_InitStruct.USART_StopBits = USART_StopBits_1; //1位停止位
//USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_InitStruct.USART_WordLength = USART_WordLength_9b;
USART_Init(USART1, &USART_InitStruct);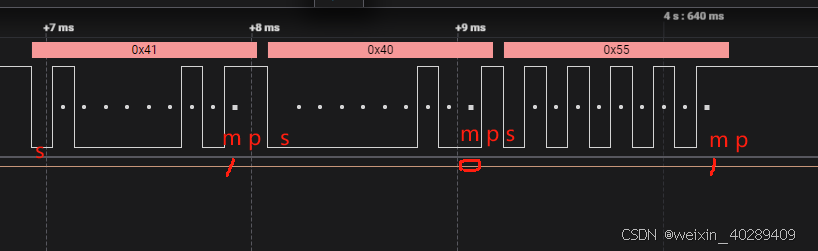
这就是发送一个字节数据的现象。
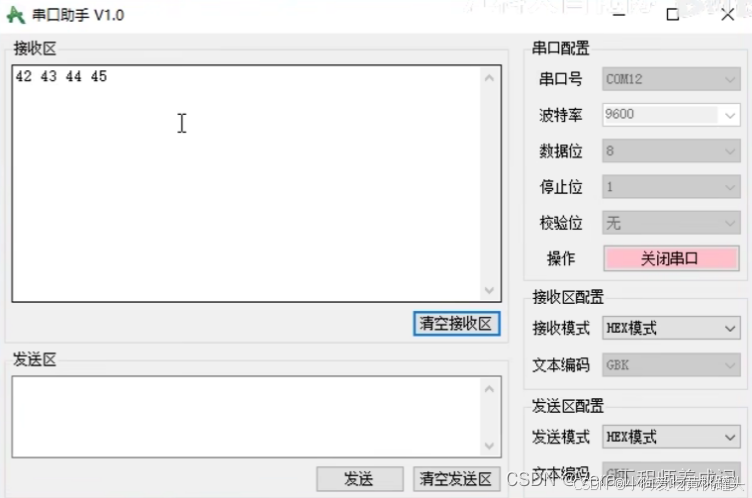
然后大家注意到下面这里有一个接收模式。目前选择的是HEX模式,也就是以原始数据的形式显示。发送41显示就是41本身。
如果我们想显示一下字符串怎么办?那就可以选择文本模式,这样就是以字符的形式
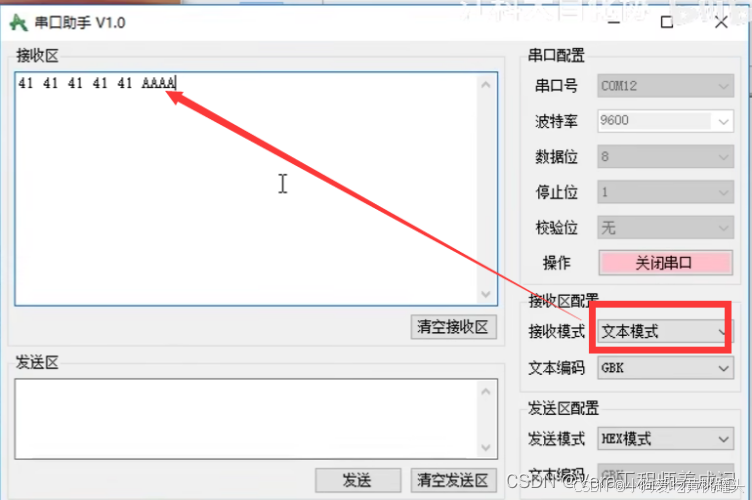
这里补充说明一下数据模式的解释
数据模式
HEX模式/十六进制模式/二进制模式(这些描述都是一个意思):以原始数据的形式显示
文本模式/字符模式(这些描述都是一个意思):以原始数据编码后的形式显示(对应ASCII码表上的符号)
下面这个表展示的就是ASCII码字符集,比如0x41这个数据对应的就是大写字母A
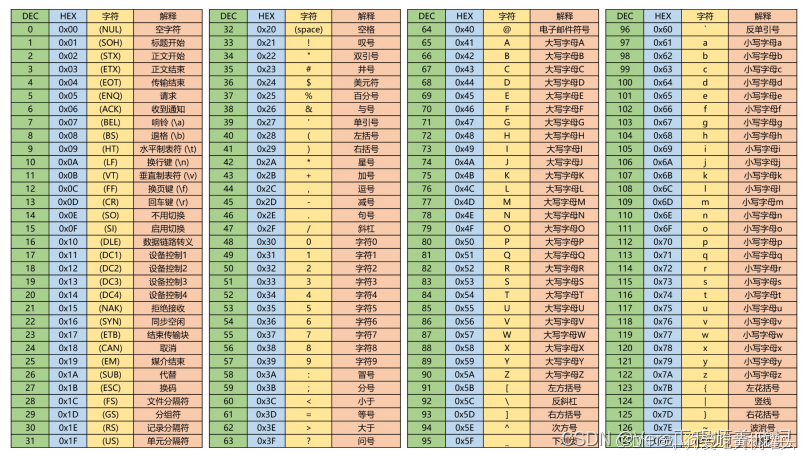
字符集的第一个字符,原始数据是0x00,对应字符是空字符,也就是保留位,不映射任何字符。一般这个0经常作为字符串的结束标志位,字符串遇到数据0x00之后,就代表字符串结束了。
随着计算机的发展,全球互相通信。为了防止不同国家编码的不兼容现象,我们可以把所有国家的字符全部收录到一个统一的字符集,这就是Unicode字符集。Unicode最常用的传输形式是UTF,有关字符编码的内容,大家可以自己再去网上搜一搜。如果编码不匹配,就会出现非常烦人的乱码,这个得注意一下。
下面这个图描述的是字符和数据在发送和接收的转换关系
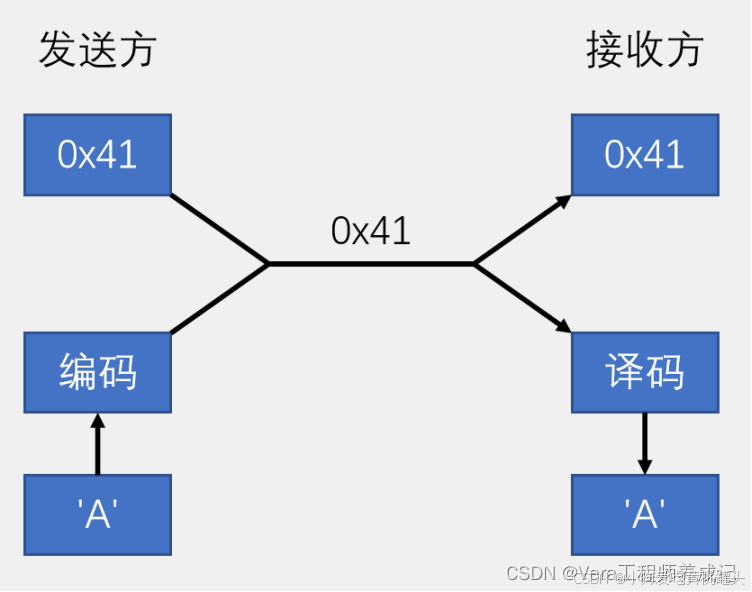
比如最上面发送0x41数据,发送的线路传输的就是0x41。接收方如果以原始数据形式显示,就是0x41。如果以字符显示,就是走下面这一路,通过字符集译码,找到字符,然后显示字符’A’。
在发送方也可以直接发送字符,比如发送字符A,这时它就会先从字符集找到A的数据进行编码,发现A对应的数据是0x41。最终在线路中传输的必须是十六进制数0x41。然后接收方可以选择查看原始数据0x41,也可进行译码得到字符A。这就是字符和数据在发送接收过程中经历的变化。
接下来我们再封装一些函数模块,这些函数大家之后用串口肯定会经常用的,光有一个发送字节函数满足不了需求。
接下来写的函数其实都是对SendByte的封装。
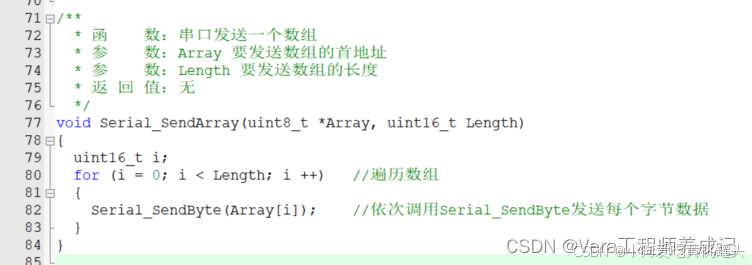
发送数组的函数
首先是发送一个数组,我们定义一个发送数组的函数Serial_SendArray
然后在主函数中这样调用
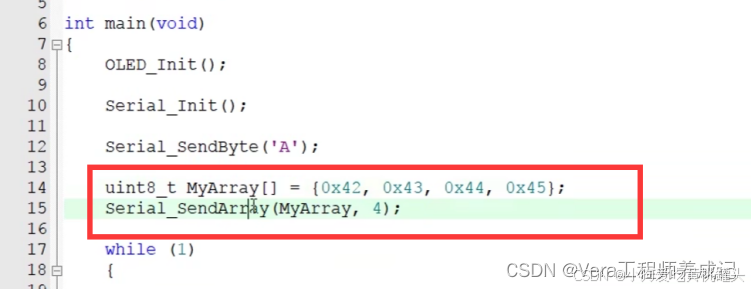
发送结果
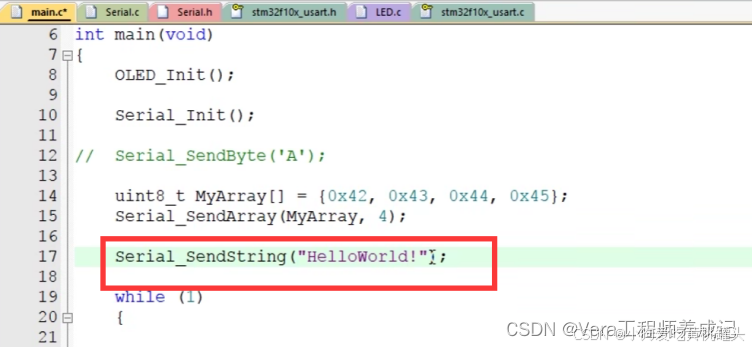
发送字符串的函数
接下来写一个发送字符串的函数Serial_SendString,然后由于字符串自带一个结束标志位,所以就不需要再传递长度参数了。

在里面执行逻辑和发送字符是非常类似的先定义变量由int i。再赋i等于零,这里循环条件就可以用结束标志位来判断了string i。
在主函数里这样调用
现象
如果想要换行可以在后面加上\r\n来执行换行命令
这样就能在每次打印之后就会执行一次换行命令了

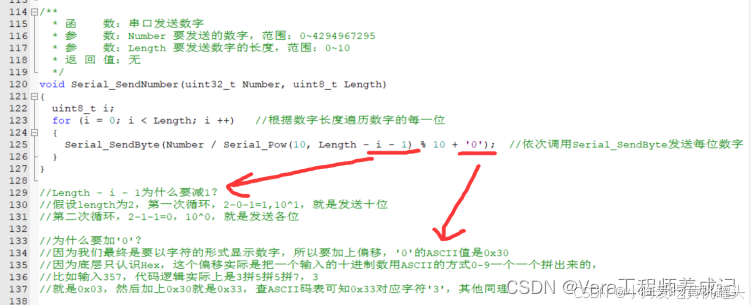
发送数字的函数
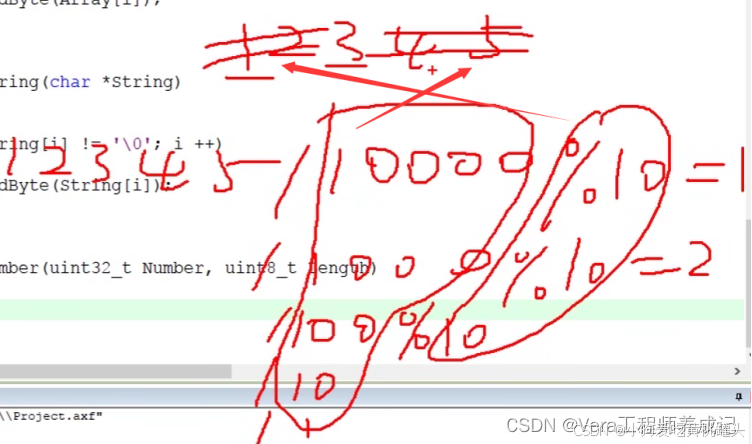
接下来我们继续分装发送数字的函数Serial_SendNumber。在函数里面,我们需要把number的个位、十位、百位等等以十进制拆分开,然后转换成字符数字对应的数据,依次发送出去。
怎么以十进制拆开?
比如有个数字是12345,
取万位,就是12345/1000%10=1,
取千位,就是12345/1000%10=2,
取百位,就是12345/100%10=3,
取十位,就是12345/10%10=4,
取个位,就是12345/1%10=5。
总结下来,取某一位,就是数字除以十的x次方,再对此取余。除以十的x次方,就是把这一位的右边去掉,对十取余就是把左边去掉。这就是拆分数字的思路。
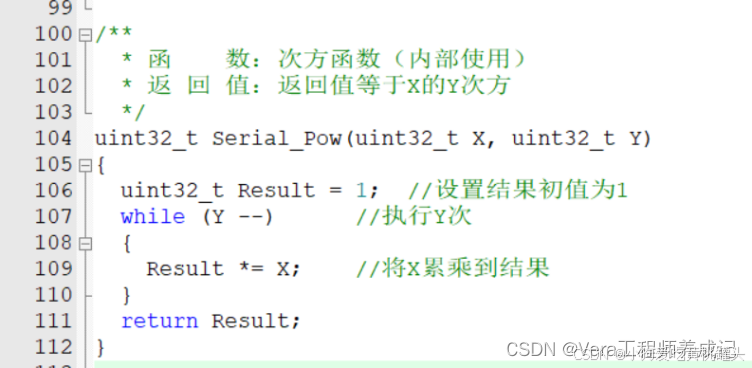
所以我们先需要写一个次方函数,
现在就可以写发送数字的函数了,这个函数默认是发送十进制数字,然后接收是接收到字符形式的数字
在主函数里这样调用
结果

程序源码
Serial.c
#include "stm32f10x.h" // Device header
#include "Uart.h"
void UART_Init(void)
{
//RCC使能外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //RCC使能UART时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //RCC使能GPIOA时钟
//配置GPIO
GPIO_InitTypeDef gpioInitStructure;
gpioInitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO为复用推挽输出模式
gpioInitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOA_Pin9为UART1_Tx
gpioInitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpioInitStructure);
//配置UART
USART_InitTypeDef USART_InitStruct;
USART_StructInit(&USART_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //不使用UART硬件流控
USART_InitStruct.USART_Mode = USART_Mode_Tx; //UART使能Tx发送
USART_InitStruct.USART_Parity = USART_Parity_No; //UART无奇偶校验
//USART_InitStruct.USART_Parity = USART_Parity_Odd; //UART无奇偶校验
USART_InitStruct.USART_StopBits = USART_StopBits_1; //1位停止位
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
//USART_InitStruct.USART_WordLength = USART_WordLength_9b;
USART_Init(USART1, &USART_InitStruct);
//使能UART
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t data)
{
USART_SendData(USART1, data);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待UART TXE标志位
//写入之后等待TXE标志位置1,表示数据从TDR寄存器转移到了发送移位寄存器
//如果不等待TDR数据移动到发送移位寄存器,下次写时就会覆盖上一次数据
//该标志位在写DR寄存器时自动清除
}
void Serial_SendArry(uint8_t data[], uint8_t length)
{
for(int i=0; i<length; i++)
{
Serial_SendByte(data[i]);
}
}
void Serial_SendString(char *str)
{
if(str)
{
while(*str != '\0')
{
Serial_SendByte(*str++);
}
}
}
uint32_t Serial_Power(uint32_t x, uint32_t y)
{
uint32_t ret = 1;
while(y > 0)
{
ret *= x;
y--;
}
return ret;
}
void Serial_SendNumber(uint32_t number, uint16_t length)
{
int i = 0;
uint8_t data;
for(i=0; i<length; i++)
{
data = number/Serial_Power(10, length - i -1)%10 + '0';
Serial_SendByte(data);
}
}
main.c
#include "stm32f10x.h" // Device header
#include "oled.h"
#include "Countersensor.h"
#include "Encoder.h"
#include "Timer.h"
#include "AD.h"
#include "Delay.h"
#include "MyDMA.h"
#include "UART.h"
extern uint16_t Num;
int main(int argc, char *argv[])
{
OLED_Init();
OLED_ShowString(1, 1, "UART");
UART_Init();
//Serial_SendByte(0x41);
//Serial_SendByte(0x40);
//Serial_SendByte(0x55);
uint8_t array[4] = {0x41,0x42, 0x43, 0x44};
char string[]= "ABCD";
//Serial_SendArry(array, 4);
Serial_SendString("hello world\r\n");
Serial_SendString("test STM32 Serial printf 2024/10/31\r\n");
Serial_SendNumber(49875, 5);
Serial_SendString("\r\n");
Serial_SendNumber(98765341, 8);
Serial_SendString("\r\n");
while(1)
{
}
return 1;
}
printf函数的移植方法
最后介绍一下printf函数的移植方法。
第一种方法
使用printf之前,我们需要打开工程选项,把这个勾选上

MicroLIB是Keil为嵌入式平台优化的一个精简库,我们等会要用的printf函数,就可以用这个MicroLIB,所以先勾上这个。
然后我们还需要对printf进行重定向,将printf函数打印的东西输出到串口。
🐞🐞因为printf函数默认是输出到屏幕,我们单片机没有屏幕,所以要进行重定向,步骤就是在串口模块里最开始加上#include <stdio.h>,

之后在最底下重写fputc函数
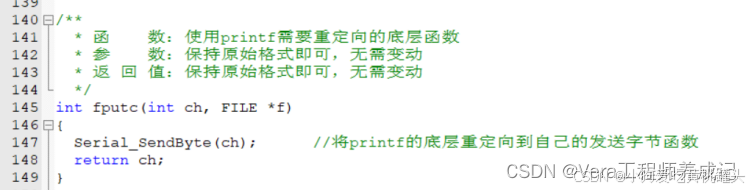
那重定向fputc跟printf有什么关系?
这是因为这个fputc是printf函数的底层,printf函数在打印的时候,就是不断调用fputc函数一个个打印的,我们把fputc函数重定向到了串口,那printf自然就输出到串口了。
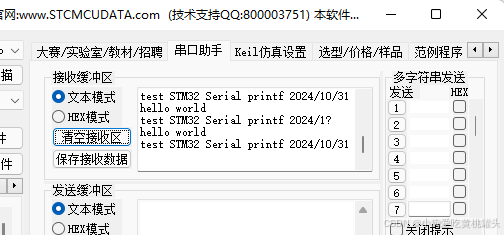
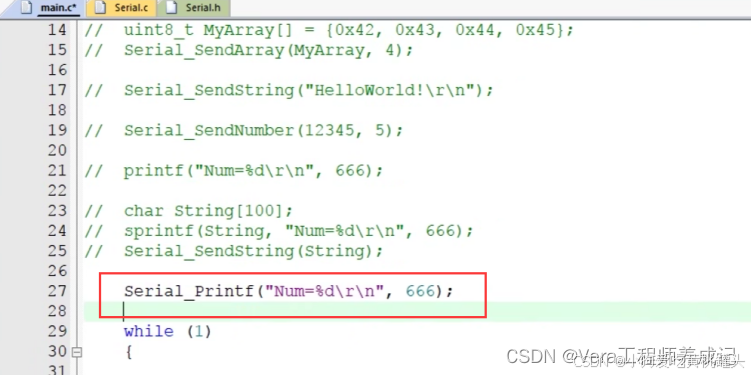
这样printf就移植好了,我们到主函数试一下,这里直接写printf
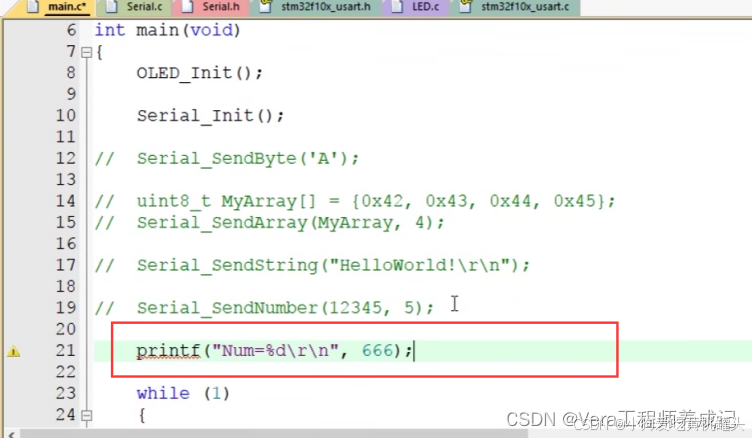
结果
接下来再介绍两种printf函数的移植方法。刚才这一种方法,printf只能有一个,你重定向到串口1了,那串口2再用就没有了。如果多个串口都想用printf怎么办?
第二种方法
这时就可以用sprintf,sprintf可以把格式化字符输出到一个字符串里。所以这里可以先定义一个字符串,长度给100,然后sprintf第一个参数是打印输出的位置,我们指定打印到string,之后就跟printf一样了。
目前这个格式化的字符串在string里,最后需要再来一个Serial_SendString把字符串通过串口发送出去,这样就完成了。
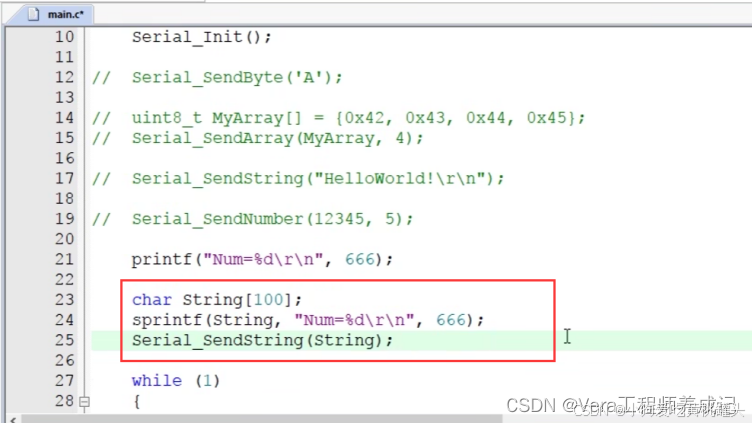
这里就是在内存里创建一块char类型的string数组,然后赋值,再通过之前定义好的Serial_SendString函数通过USART1发送String。
因为sprintf可以指定打印位置,不涉及重定向的东西,所以每个串口都可以使用sprintf进行格式化打印。
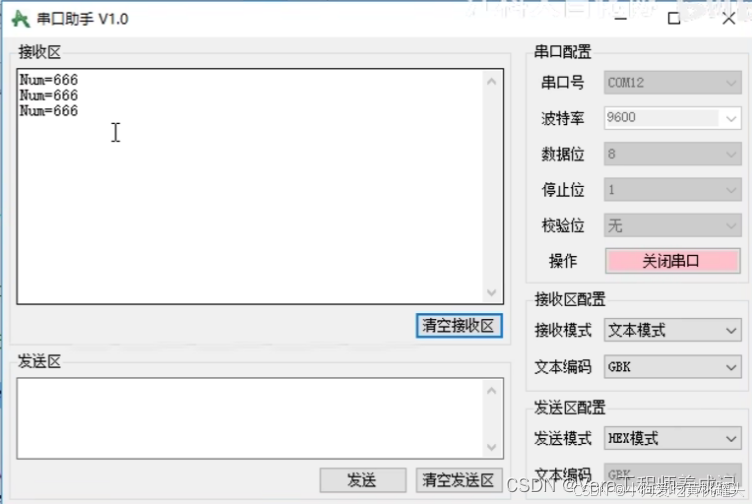
现象是一样的
最后再介绍一种方法。
第三种方法
sprintf每次都得先定义字符串,再打印到字符串,再发送字符串,太麻烦了。我们要是能分装一下这个过程就再好不过了。
所以第三种方法就是封装sprintf。由于printf这类函数比较特殊,它支持可变的参数,像我们之前写的函数,参数的个数都是固定的,可变现参数,这个执行起来比较复杂。
首先在串口模块里先添加头文件#include <stdarg.h>
然后在最后对sprintf函数进行分装
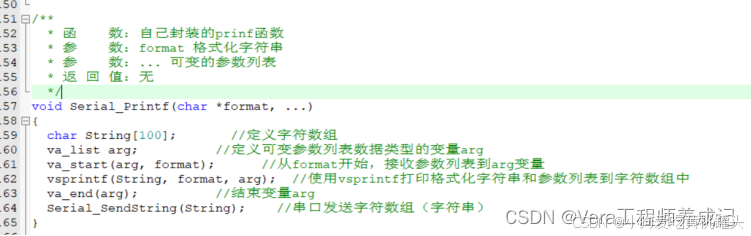
这里面出现了很多没见过的函数,如果没学过这种用法,可能比较难理解,这个也没关系,知道这样移植就行了。如果学过了,那其实是基本操作。也可以学学这种可变参数的用法,自己写其他函数的时候,也可以用。
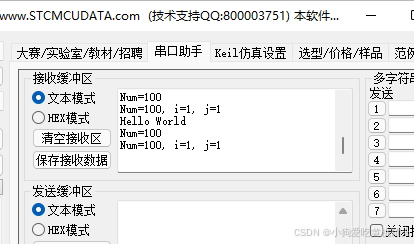
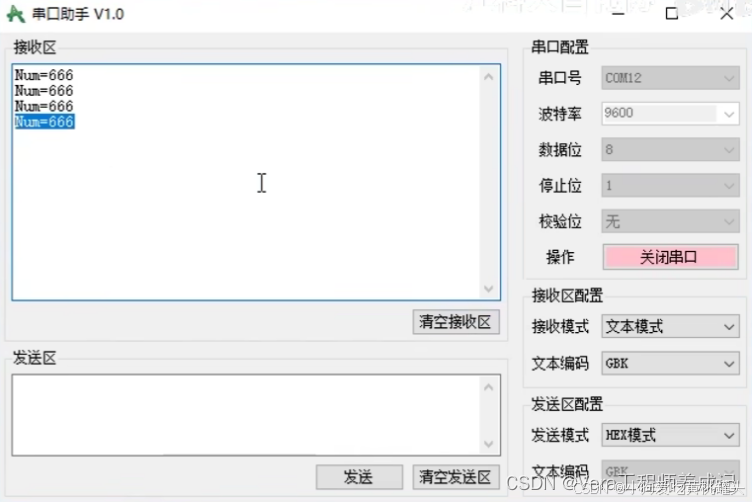
在主函数里调用
这样也可以实现printf的功能
以上就是printf函数的移植方法,最常见的是第一种。如果你有多个printf的需求,可以了解一下后两种方法。
显示汉字的操作方法
最后再讲一个显示汉字的操作方法
第一种方法
目前我们这个汉字编码格式选的是UTF8,所以最终发送到串口,汉字会以UTF8的方式编码,最终串口助手也得选择UTF8才能解码正确。

先说一下UTF8不乱码的方案,比如这里写个字符串,你好世界。

不过这样直接写汉字,编译器有时候会报错,这里需要打开工程选项,这里写上--no-multibyte-chars,需要给编译器输入一个这样的参数。
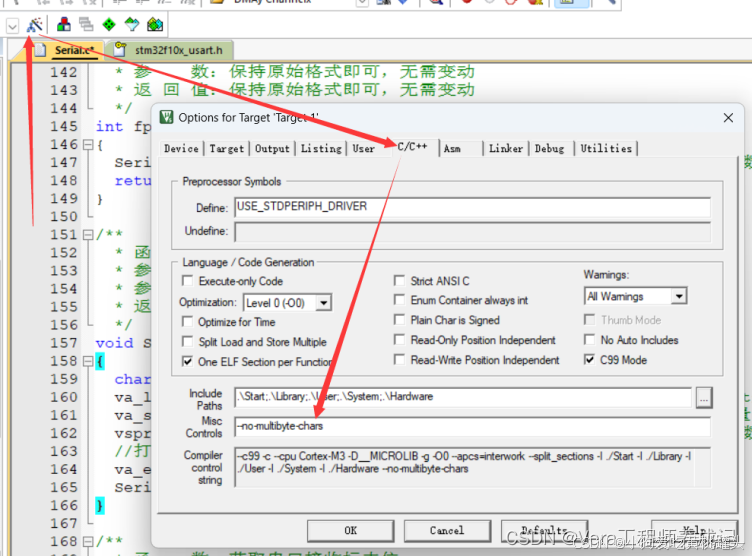
ok这样编译下载看看在串口助手这里目前是乱码
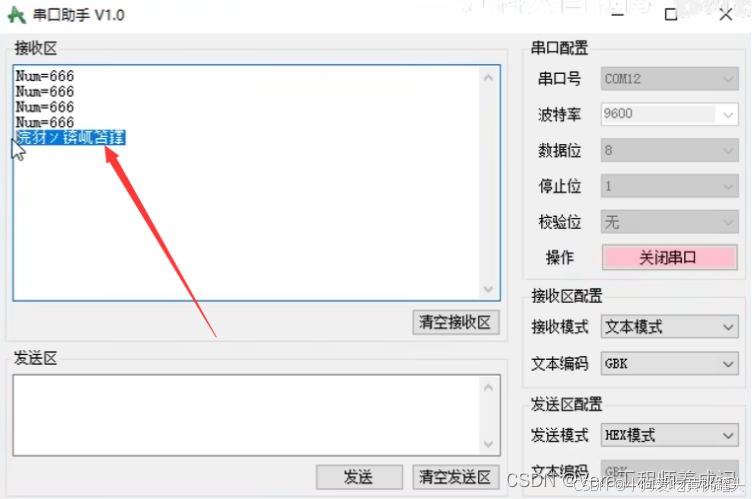
编码方式要选择UTF-8这样就不会乱码了
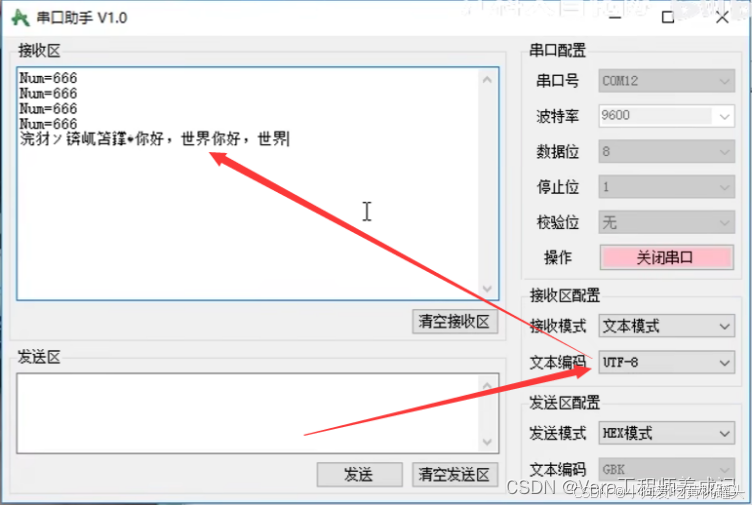
这是UTF8的解决方案,但是UTF8可能有些软件兼容性不好,所以第二种方式就是切换为GB2312编码,这是汉字的编码方式。
2.🚢第二个代码:串口的发送+接收
接线图:

接线图和上一个是一样的。
然后初始化这里加上接收的部分。
首先是GPIO口,我们要使用RX的引脚。在引脚定义表里,我们知道USART1的RX,复用在了PA10引脚
所以这里需要再初始化一下PA10。
引脚模式可以选择浮空输入或上拉输入,我们就选择上拉输入模式。

下面这些参数大部分不用改,只需要改一下模式,这个参数后面加上一个或串口模式Rx。

如果你只需要接收,那就把前面这个TX去掉就行了。
对串口接收来说,可以使用查询和中断两种方法。如果使用查询,那初始化就结束了。如果使用中断,那还需要在这里开启中断配置NVIC。像我们最开始演示的那个现象,使用查询的方法就可以完成。
这里先演示一下查询,再演示一下中断。
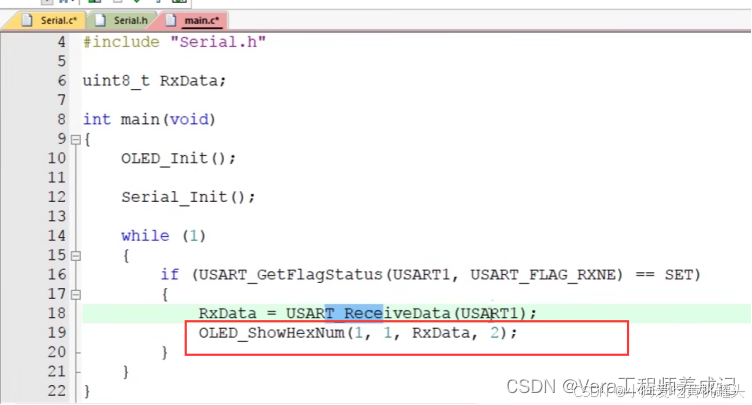
查询的流程是在主函数里不断判断RXNE标志位,如果置1了,就说明收到数据了,那再调用receive Data读取DR寄存器,这样就行了。
直接在主函数演示,就不再分装了。

目前接收到的一个字节,数据就已经在RxData里了。
接下来我们可以进行显示。然后还有一个清除标志位的问题

🐞🐞当RDR移位寄存器中的数据被转移到USART_DR寄存器中,该位被硬件置位。如果USART_CR1寄存器中的RXNEIE为1则产生中断。🐞🐞对USART_DR的读操作可以将该位清零。
这里读DR可以自动清零标志位,所以这里读完DR就不需要我们再清除标志位了。
UART.c
#include "stm32f10x.h" // Device header
#include "Uart.h"
#include <stdio.h>
#include <stdarg.h>
void UART_Init(void)
{
//RCC使能外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //RCC使能UART时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //RCC使能GPIOA时钟
//配置GPIO
GPIO_InitTypeDef gpioInitStructure;
gpioInitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO为复用推挽输出模式
gpioInitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOA_Pin9为UART1_Tx
gpioInitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpioInitStructure);
gpioInitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO为上拉输入
gpioInitStructure.GPIO_Pin = GPIO_Pin_10; //GPIOA_Pin9为UART1_Rx
gpioInitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpioInitStructure);
//配置UART
USART_InitTypeDef USART_InitStruct;
USART_StructInit(&USART_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //不使用UART硬件流控
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //UART使能Tx发送
USART_InitStruct.USART_Parity = USART_Parity_No; //UART无奇偶校验
USART_InitStruct.USART_StopBits = USART_StopBits_1; //1位停止位
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
//使能UART
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t data)
{
USART_SendData(USART1, data);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待UART TXE标志位
//写入之后等待TXE标志位置1,表示数据从TDR寄存器转移到了发送移位寄存器
//如果不等待TDR数据移动到发送移位寄存器,下次写时就会覆盖上一次数据
//该标志位在写DR寄存器时自动清除
}
void Serial_SendArry(uint8_t data[], uint8_t length)
{
for(int i=0; i<length; i++)
{
Serial_SendByte(data[i]);
}
}
void Serial_SendString(char *str)
{
if(str)
{
while(*str != '\0')
{
Serial_SendByte(*str++);
}
}
}
uint32_t Serial_Power(uint32_t x, uint32_t y)
{
uint32_t ret = 1;
while(y > 0)
{
ret *= x;
y--;
}
return ret;
}
void Serial_SendNumber(uint32_t number, uint16_t length)
{
int i = 0;
uint8_t data;
for(i=0; i<length; i++)
{
data = number/Serial_Power(10, length - i -1)%10 + '0';
Serial_SendByte(data);
}
}
/* 重写fputc()函数,重定向printf()到串口
*
*/
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char buf[128];
va_list arg;
va_start(arg, format);
vsprintf(buf, format, arg);
va_end(arg);
Serial_SendString(buf);
}main.c
#include "stm32f10x.h" // Device header
#include "oled.h"
#include "Countersensor.h"
#include "Encoder.h"
#include "Timer.h"
#include "AD.h"
#include "Delay.h"
#include "MyDMA.h"
#include "UART.h"
#include <stdio.h>
extern uint16_t Num;
int main(int argc, char *argv[])
{
OLED_Init();
OLED_ShowString(1, 1, "UART:");
UART_Init();
while(1)
{
if(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == SET)
{
uint8_t data = USART_ReceiveData(USART1);
OLED_ShowString(2, 1, "RX:");
OLED_ShowHexNum(2, 4, data, 2);
}
}
return 1;
}
下载看一下现象
我们需要在串口助手发送区里写入数据,发送模式选择hex模式。然后在这里写,比如41。
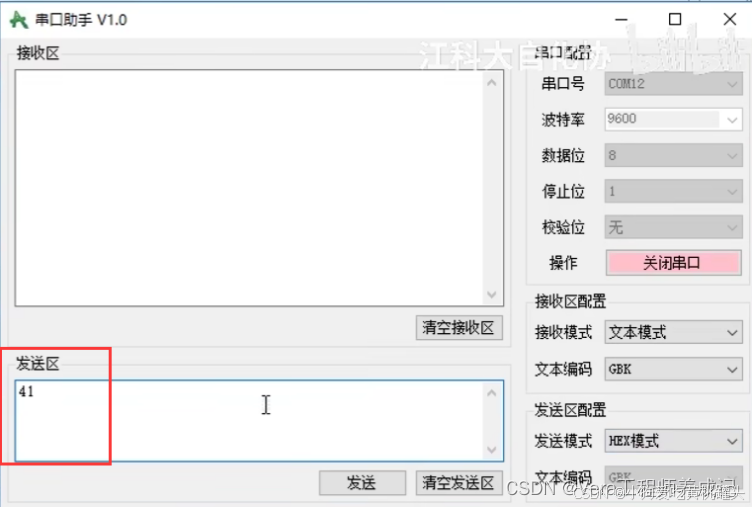
在hex模式下,这里只能写十六进制数,非法字符都将会被忽略。
点发送,在OLED上可以看到就收到了数据41。

这就是查询方法的串口接收程序现象。如果程序比较简单,查询方法是可以考虑的。那接下来我们再演示一下中断方法的程序。
如何使用中断?
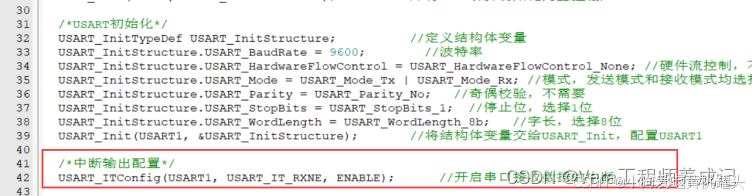
首先在GPIO初始化后面这里要加上开启中断的代码。
在初始化NVIC

到这里RXNE标志位一旦置1了,就会向NVIC申请中断之后,我们可以在中断函数里接收数据。
中断函数的名字要启动文件找一下:

找到名字后写中断函数
🐞🐞进入if之后,那if的最后要不要清除标志位?
🐞🐞如果你读取了DR,就可以自动清除。如果没读取DR,就需要手动清除,我们这里直接给清一下,这个也不影响。
之后在这里面,可以直接读取DR执行一些操作。当然由于这个代码是在模块里不太适合加入过多其他的代码。所以就先在最上面定义两个变量

然后在这个中断函数里面,我们先读取到模块的变量里,读完之后,置一个自己的标志位。
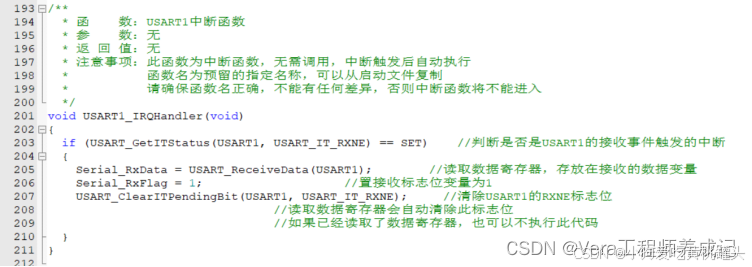
我们也实现一个读后自动清除的功能

下面再写一个获取串口接收的数据
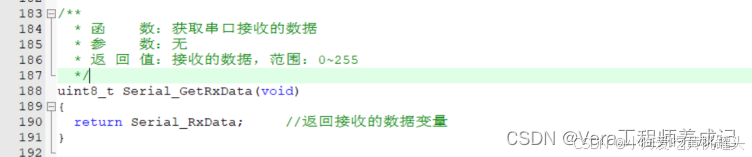
到这里,中断接收和变量的封装就完成了。其实这里就是在中断里把数据进行了一次转存。最终还是要扫描查询这个RxFlag来接收数据的。
对于这种单字节接收来说,可能转存一下意义不大。这里这样写,主要是给大家演示一下中断接收的操作方法。另外也是为我们下节多字节数据包接收做一个铺垫。
UART.c
#include "stm32f10x.h" // Device header
#include "Uart.h"
#include <stdio.h>
#include <stdarg.h>
void UART_Init(void)
{
//RCC使能外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //RCC使能UART时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //RCC使能GPIOA时钟
//配置GPIO
GPIO_InitTypeDef gpioInitStructure;
gpioInitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO为复用推挽输出模式
gpioInitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOA_Pin9为UART1_Tx
gpioInitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpioInitStructure);
gpioInitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO为上拉输入
gpioInitStructure.GPIO_Pin = GPIO_Pin_10; //GPIOA_Pin9为UART1_Rx
gpioInitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpioInitStructure);
//配置UART
USART_InitTypeDef USART_InitStruct;
USART_StructInit(&USART_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //不使用UART硬件流控
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //UART使能Tx发送
USART_InitStruct.USART_Parity = USART_Parity_No; //UART无奇偶校验
USART_InitStruct.USART_StopBits = USART_StopBits_1; //1位停止位
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
//使能UART中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
//NVIC配置UART中断优先级
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn; //使能UART1_IRQ中断
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStruct);
//使能UART
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t data)
{
USART_SendData(USART1, data);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待UART TXE标志位
//写入之后等待TXE标志位置1,表示数据从TDR寄存器转移到了发送移位寄存器
//如果不等待TDR数据移动到发送移位寄存器,下次写时就会覆盖上一次数据
//该标志位在写DR寄存器时自动清除
}
void Serial_SendArry(uint8_t data[], uint8_t length)
{
for(int i=0; i<length; i++)
{
Serial_SendByte(data[i]);
}
}
void Serial_SendString(char *str)
{
if(str)
{
while(*str != '\0')
{
Serial_SendByte(*str++);
}
}
}
uint32_t Serial_Power(uint32_t x, uint32_t y)
{
uint32_t ret = 1;
while(y > 0)
{
ret *= x;
y--;
}
return ret;
}
void Serial_SendNumber(uint32_t number, uint16_t length)
{
int i = 0;
uint8_t data;
for(i=0; i<length; i++)
{
data = number/Serial_Power(10, length - i -1)%10 + '0';
Serial_SendByte(data);
}
}
/* 重写fputc()函数,重定向printf()到串口
*
*/
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char buf[128];
va_list arg;
va_start(arg, format);
vsprintf(buf, format, arg);
va_end(arg);
Serial_SendString(buf);
}
volatile uint8_t Seial_RxFlag = 0;
volatile uint8_t Seial_Data = 0;
//中断服务函数
void USART1_IRQHandler()
{
Seial_RxFlag = 1;
Seial_Data = USART_ReceiveData(USART1);
//清除UART RXNE 标志位
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
uint8_t Serial_GetRxFlag(void)
{
uint8_t ret = 0;
if(Seial_RxFlag)
{
ret = 1;
Seial_RxFlag = 0;
}
return ret;
}
uint8_t Serial_GetRxData(void)
{
return Seial_Data;
}
main.c
#include "stm32f10x.h" // Device header
#include "oled.h"
#include "Countersensor.h"
#include "Encoder.h"
#include "Timer.h"
#include "AD.h"
#include "Delay.h"
#include "MyDMA.h"
#include "UART.h"
#include <stdio.h>
extern uint16_t Num;
int main(int argc, char *argv[])
{
OLED_Init();
OLED_ShowString(1, 1, "UART:");
UART_Init();
printf("Hello World\r\n");
OLED_ShowString(2, 1, "RX:");
while(1)
{
if(Serial_GetRxFlag() == 1)
{
uint8_t data = Serial_GetRxData();
Serial_SendByte(data);
//OLED_ShowHexNum(2, 4, data, 2);
}
}
return 1;
}
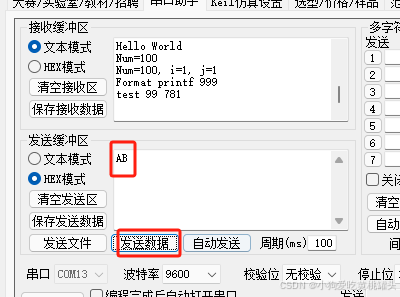
实验现象