37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来---小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验七十五:TTL转RS-485模块 MAX485 RS485模块
MAX485
是一个8个引脚的芯片,它是一个标准的RS485收发器,只能进行半双工的通讯,内含一个输出驱动器和一个信号接收器。MAX485具有低功耗设计,静态电流仅为300uA。MAX485具有三态输出特性,在使用MAX485时,总线最多可以同时连接32个MAX485芯片。通讯波特率可以达到2.5M 。

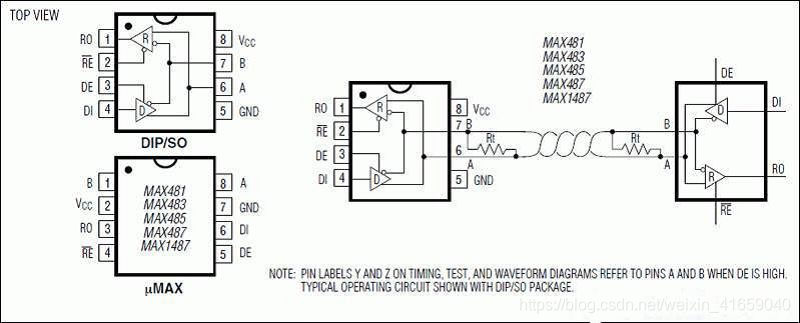
MAX485的引脚定义
RO(引脚1):接收信号的输出引脚。可以把来自A和B引脚的总线信号,输出给单片机。是COMS电平,可以直接连接到单片机。
RE(引脚2):接收信号的控制引脚。当这个引脚低电平时,RO引脚有效,MAX485通过RO把来自总线的信号输出到单片机;当这个引脚高电平时,RO引脚处于高阻状态。
DE(引脚3):输出信号的控制引脚。当这个引脚低电平时,输出驱动器无效;当这个引脚高电平时,输出驱动器有效,来自DI引脚的输出信号通过A和B引脚被加载到总线上。是COMS电平,可以直接连接到单片机。
DI(引脚4):输出驱动器的输入引脚。是COMS电平,可以直接连接到单片机。当DE是高电平时,这个引脚的信号通过A和B脚被加载给总线。
GND(引脚5):电源地线。
A(引脚6):连接到RS485总线的A端。
B(引脚7):连接到RS485总线的B端。
Vcc(引脚8):电源线引脚。电源4.25V≤Vcc≤5.75V。
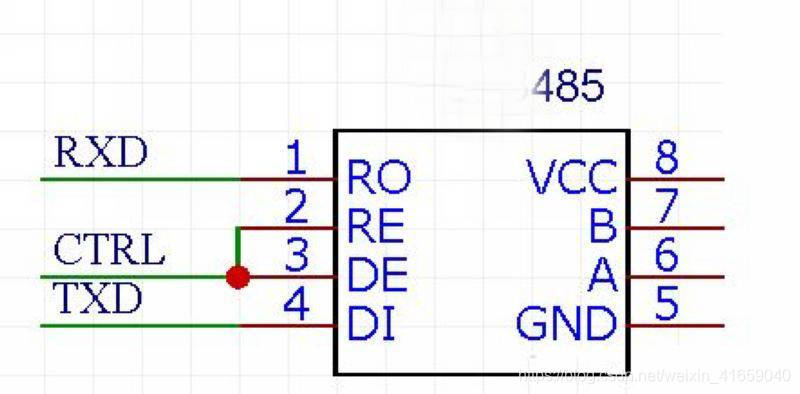
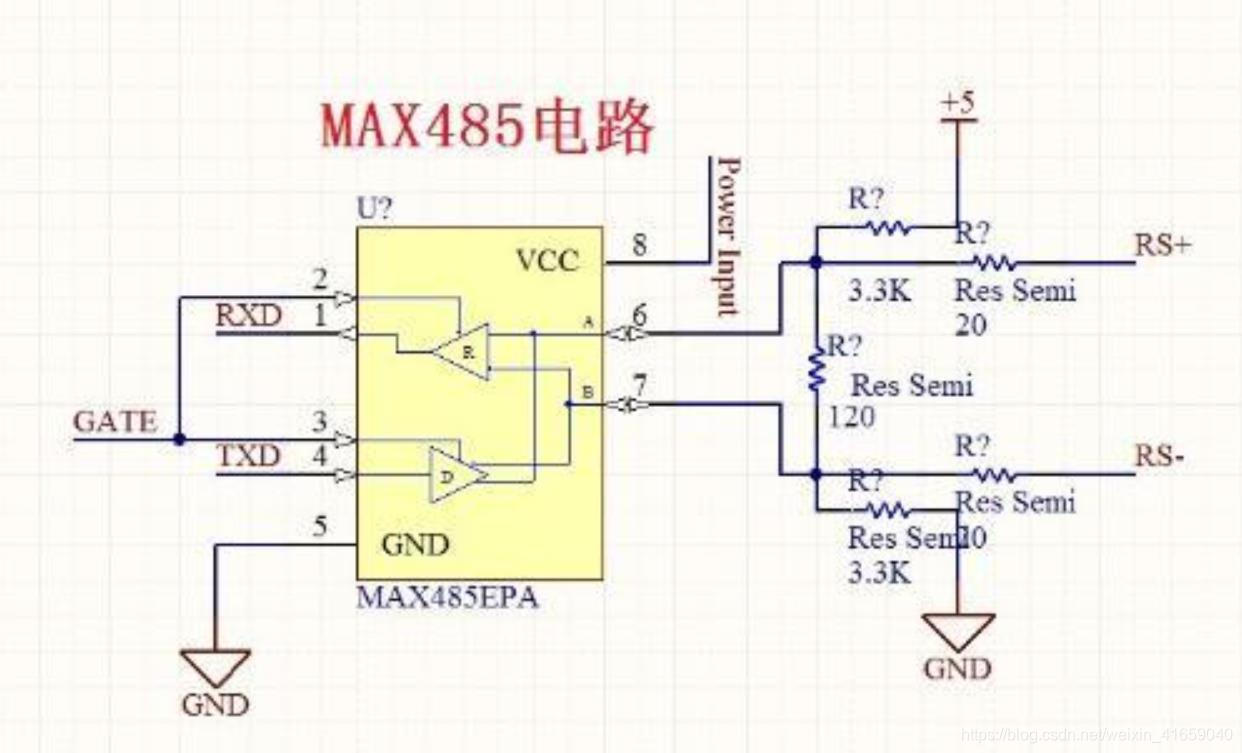
MAX485采用单一电源+5 V工作,额定电流为300 μA,采用半双工通讯方式。它完成将TTL电平转换为RS-485电平的功能。MAX485芯片的结构和引脚都非常简单,内部含有一个驱动器和接收器。RO和DI端分别为接收器的输出和驱动器的输入端,与单片机连接时只需分别与单片机的RXD和TXD相连即可;/RE和DE端分别为接收和发送的使能端,当/RE为逻辑0时,器件处于接收状态;当DE为逻辑1时,器件处于发送状态,因为MAX485工作在半双工状态,所以只需用单片机的一个管脚控制这两个引脚即可;A端和B端分别为接收和发送的差分信号端,当A引脚的电平高于B时,代表发送的数据为1;当A的电平低于B端时,代表发送的数据为0。在与单片机连接时接线非常简单。只需要一个信号控制MAX485的接收和发送即可。同时将A和B端之间加匹配电阻,一般可选100Ω的电阻。

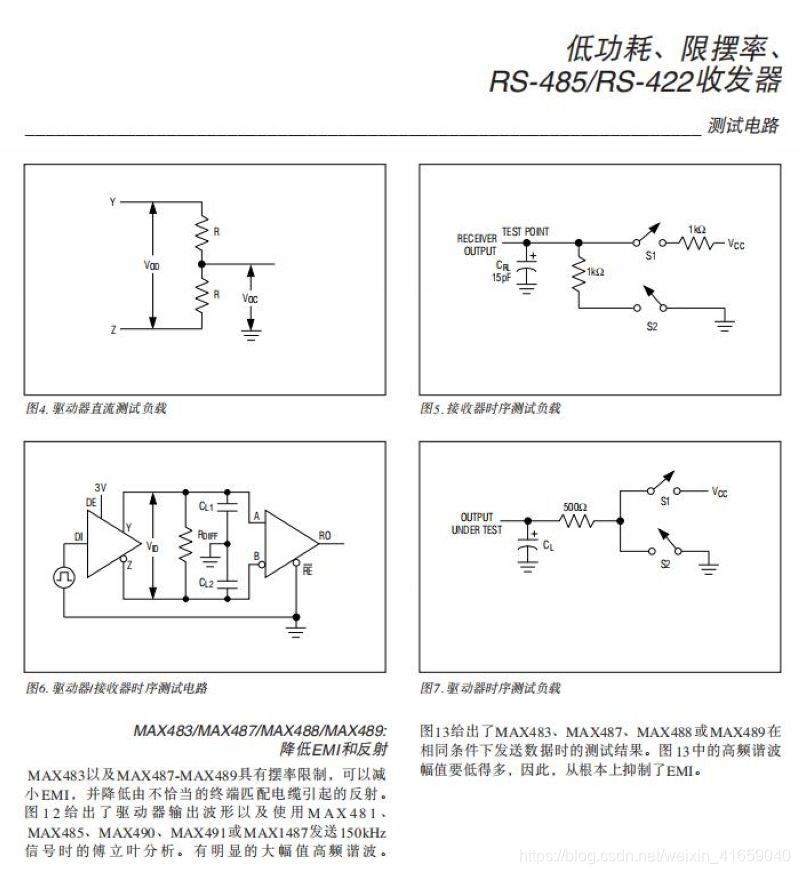
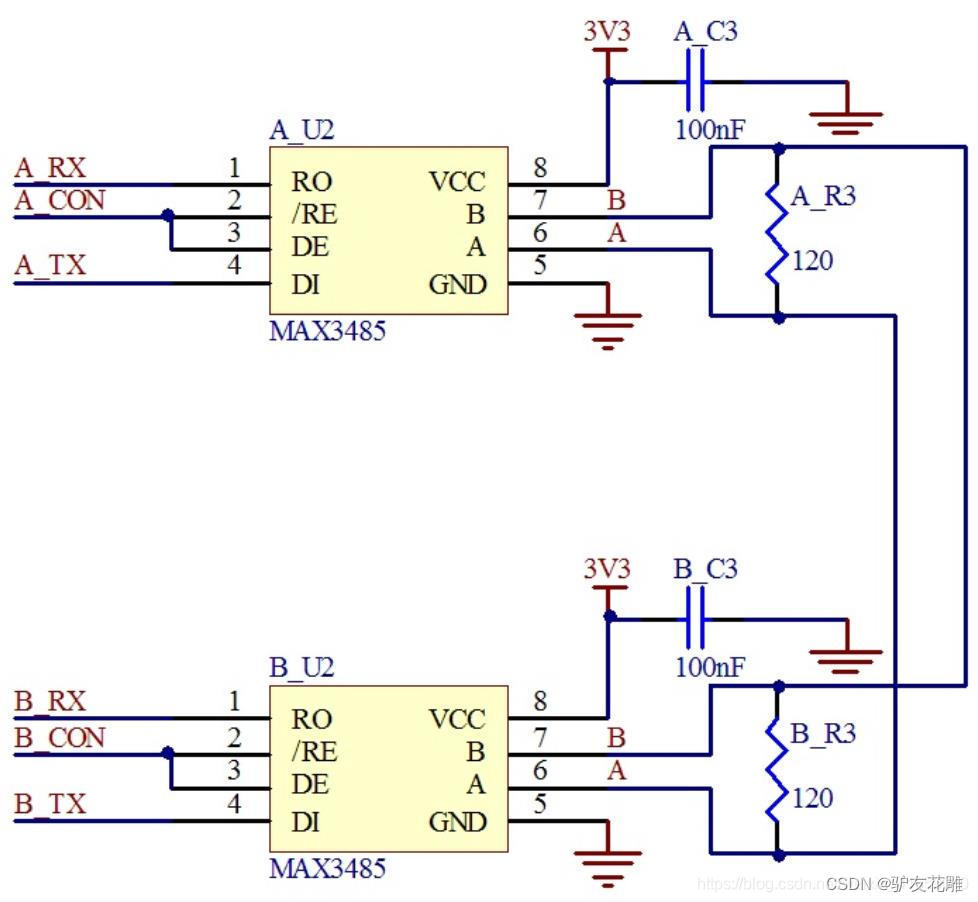
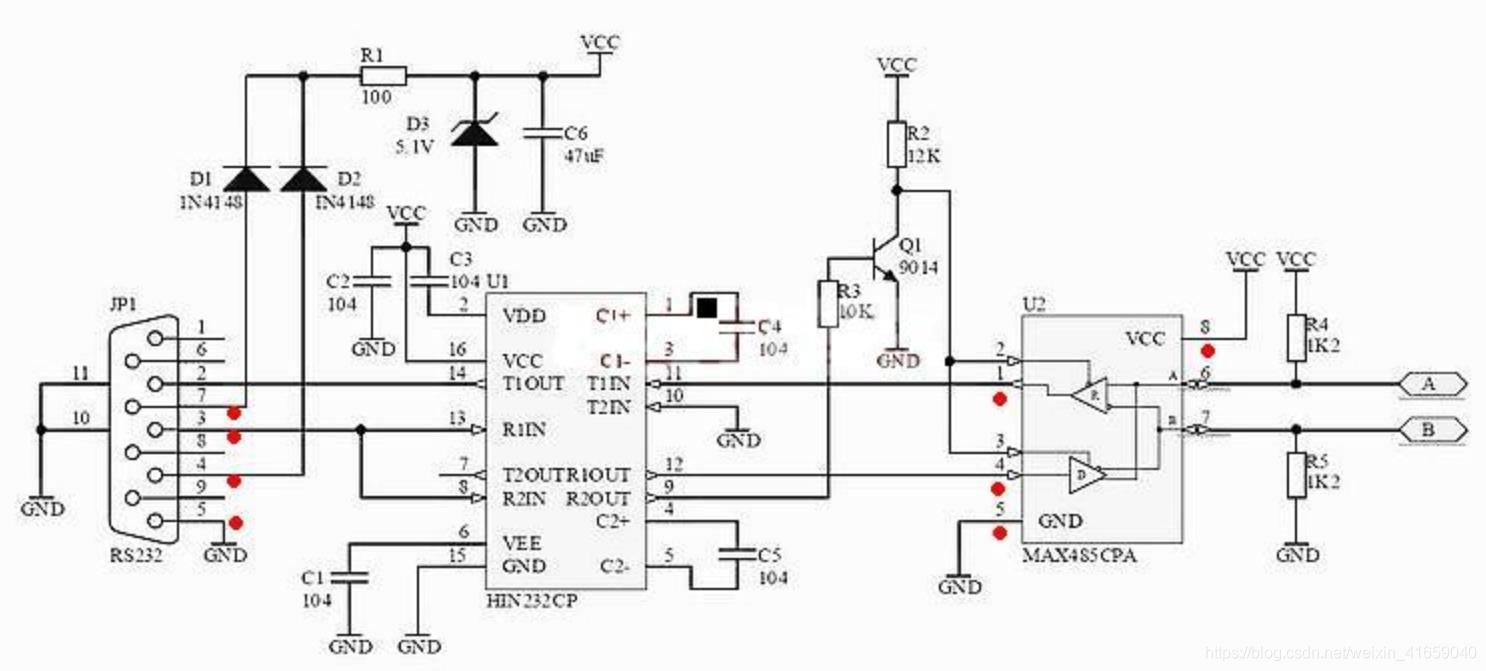
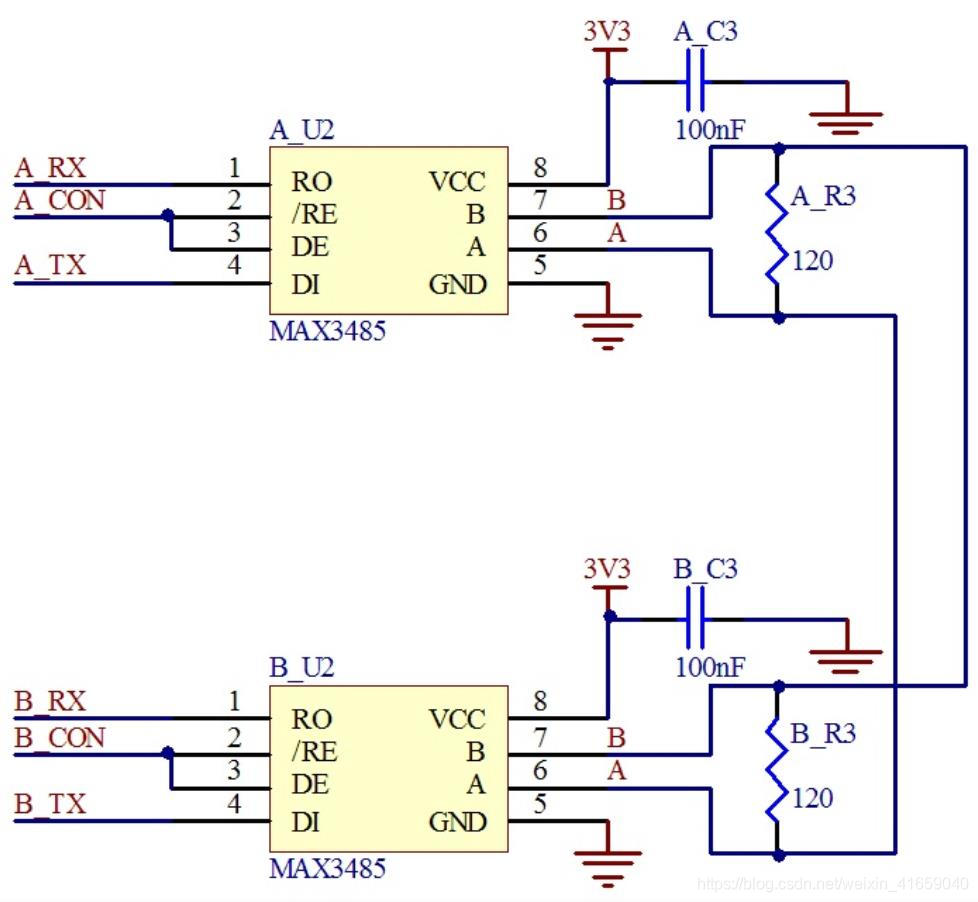
MAX485的几个应用电路
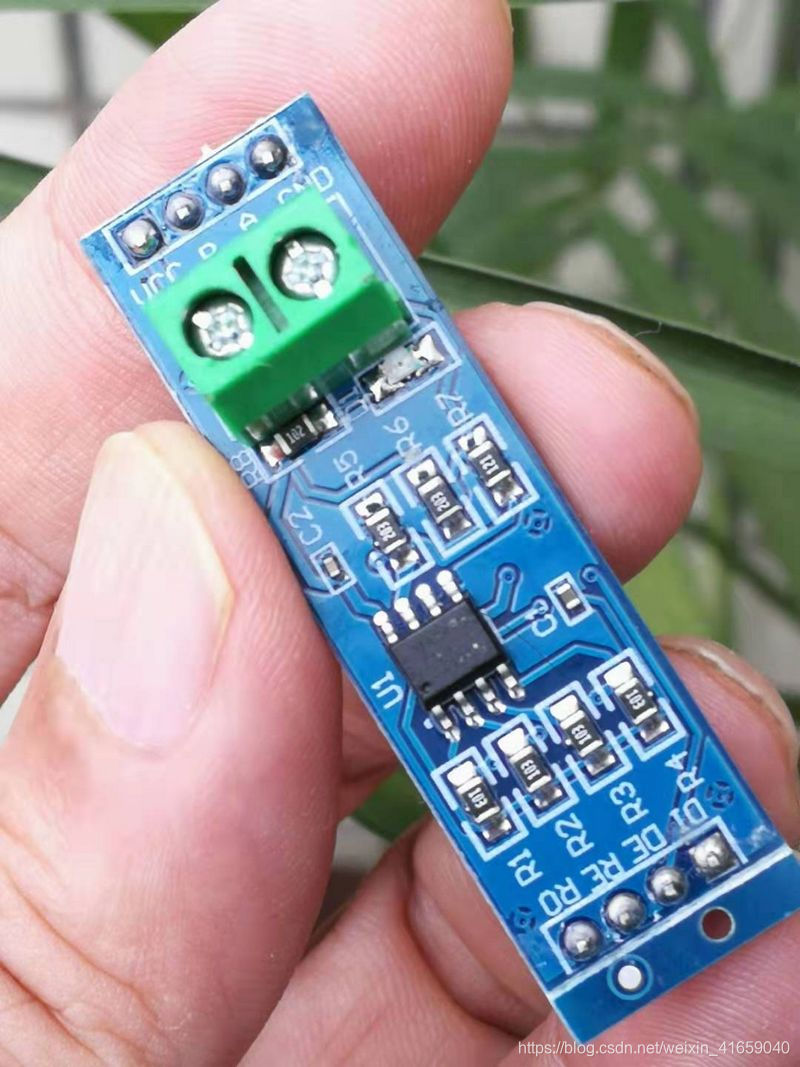
| TTL转RS-485模块 MAX485 RS485模块 |
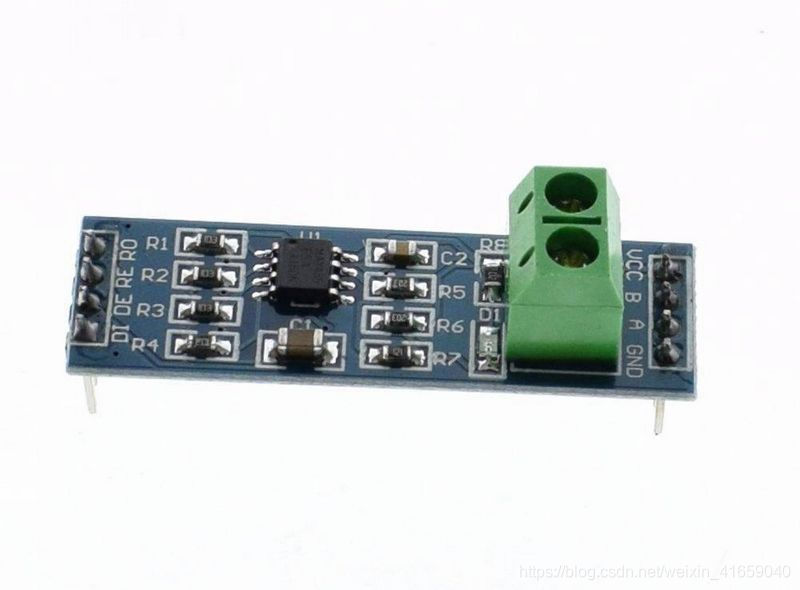
模块特点
1、板载MAX485芯片,是一款用于RS-485通信的低功耗、限摆率收发器
2、板载接5.08(mm)间距2P接线柱,方便RS-485通信接线
3、芯片全部引脚已经引出,可以通过单片机控制操作
4、工作电压:5V
5、板子尺寸:46(mm)x12(mm)
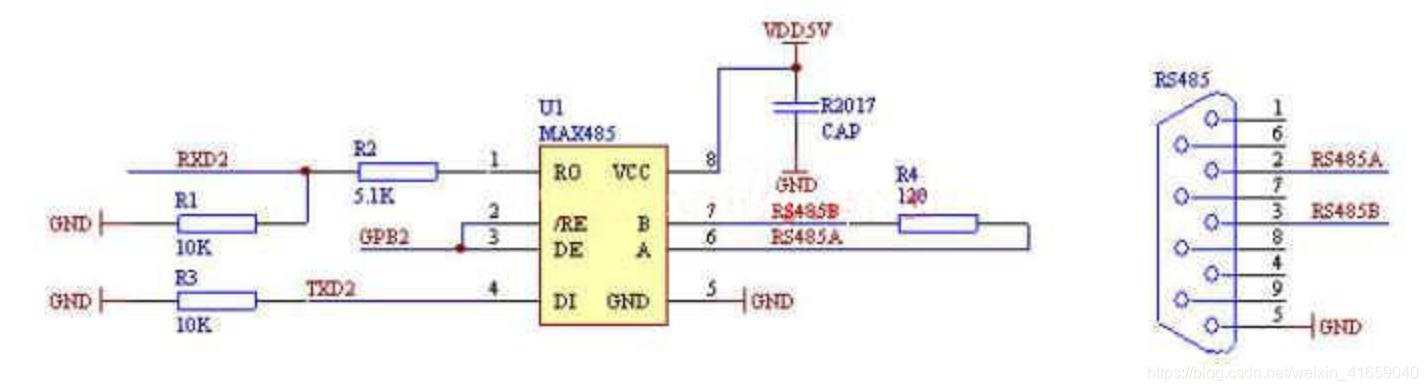
模块电原理图
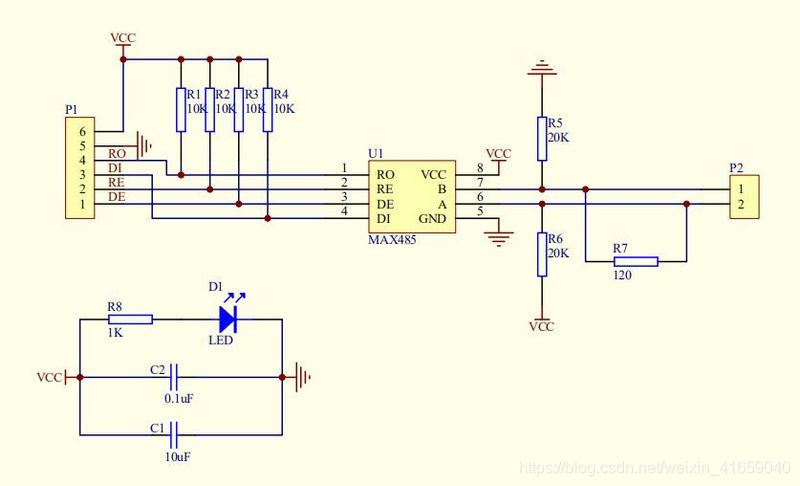
相比TTL的通讯方式,RS485具有传输距离远,抗干扰能力强,能够串联大量RS485设备的特点。最重要的是,能兼容大量RS485协议的工业级设备。如果用户需要在多个设备之前保持长距离稳定通信,RS485是一个非常好的选择。
● 工作电压:5V
● 板载MAX485芯片
● RS485通信功耗低
● 5.08mm间距2P端子
● 方便的RS-485通讯接线
● 板尺寸:44 x 14mm
● 它允许长距离1200米的串行通信
MAX-485 TTL至RS-485转换器模块的引脚
引脚名称 引脚说明
VCC 5V
A 非反相接收器输入,非反相驱动器输出
B 反相接收器输入,反相驱动器输出
GND GND(0V)
R0 接收器输出(RX引脚)
RE 接收器输出(低电平有效)
DE 驱动器输出(高电平使能)
DI 驱动器输入(TX引脚)
RS485由RS232和RS422发展而来,弥补了抗干扰能力差、通信距离短、速率低的缺点,增加了多点、双向通信能力,即允许多个发送器连接在同一条主线上,同时增加了发送器的驱动能力和冲突保护特性,扩展了总线共模范围。
RS485可以采用二线和四线两种方式,二线制可以实现真正的多点双向通信,其主要特点如下:
(1)RS485的接口信号电平比RS231-C低,不易损坏接口电路的芯片,且该电平与TTL电平兼容,方便于TTL电路相连接。
(2)RS485的数据最高传输速率为10Mbps.其平衡双绞线的长度与传输速率呈反比,在100Kbps速率下,才可能使用规定的最长电缆长度,只有在很短的距离下才能获得最高传输速率。
(3)RS485接口采用平衡驱动器和差分接收器的组合,抗共模干扰能力强,即抗噪声干扰性好,因而通信距离远,最大传输距离大约为1200m,实际可达3000m。
(4)RS485接口在总线上允许连接多达128个收发器,既具有多站能力.同时需要两个终端电阻,其阻值要求等于传输电缆的特性阻抗.在短距离300m内传输时可不连接终端电阻。
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验七十六:TTL转RS-485模块 MAX485 RS485模块
将Arduino上的数字引脚10、11设置为软串口RX和TX与MAX485模块上的RO和DI连接
MAX485模块上的RE和DE连接在一起用一个引脚2控制MAX485收发状态切换
*/
#include <SoftwareSerial.h>
SoftwareSerial Master(10, 11);
char val;
int DE_RE=2;
void setup() {
Serial.begin(38400);
Serial.println("Master is ready!");
Master.begin(38400);
pinMode(DE_RE,OUTPUT);
digitalWrite(DE_RE,LOW);
}
void loop() {
while (Serial.available()) {
digitalWrite(DE_RE,HIGH);
val = Serial.read();
Master.write(val);
}
digitalWrite(DE_RE,LOW);
while(Master.available()) {
val = Master.read();
Serial.write(val);
}
}实验串口返回情况
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验七十六:TTL转RS-485模块 MAX485 RS485模块
程序之二,主机代码
*/
#include <SoftwareSerial.h>
SoftwareSerial Master(10, 11);
char val[5]={'0','0','N','N','N'}; //定义一个数组,用来将从机地址和信息匹配
char address; //定义从机地址
int DE_RE=2;
void setup() {
Serial.begin(9600); //初始化
Serial.println("Master is ready!");
Master.begin(38400);
pinMode(DE_RE,OUTPUT);
digitalWrite(DE_RE,LOW);
}
void loop()
{
for(int i = 49 ; i < 51 ; i++) //用来对每个从机进行一次大轮询
{
//==========发送车位序号i=============================================//
digitalWrite(DE_RE,HIGH); //将主机设为发送状态
address = i; //给从机发地址,此时是字符式,49对应1的字符串
Master.write(address); //传唤对应号码的从机
digitalWrite(DE_RE,LOW); //然后立马换成接收状态
delay(500); //等一下从机反应,之前没有delay,
//maste.available还没反应过来,就过去了,加个
//delay刚刚好
//或许等从机加了超声波,还得调delay的时间
//==========接收车位信息到数组val里===================================//
while(Master.available()) //等从机把数据发过来
{
val[i-49] = Master.read(); //读车位信息到数组val
}
delay(1000); //小循环
} //整个for循环结束
for(int a = 0 ; a < 5 ; a++) //然后把整个字符串打印出来进行观察
{
Serial.print(a+1);
Serial.println(val[a]);
}
delay(2000); //最后一整个过程结束后,多等两秒钟
}实验二串口返回情况
实验场景图
参考接线图