论文(欢迎引用,哈哈):
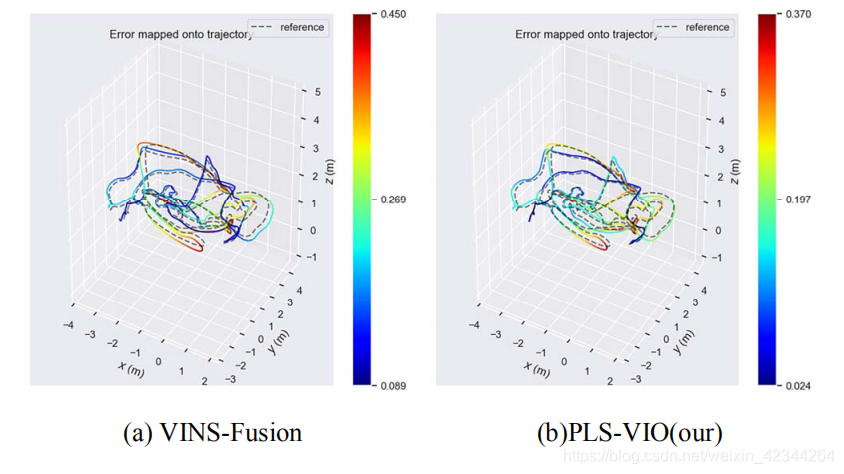
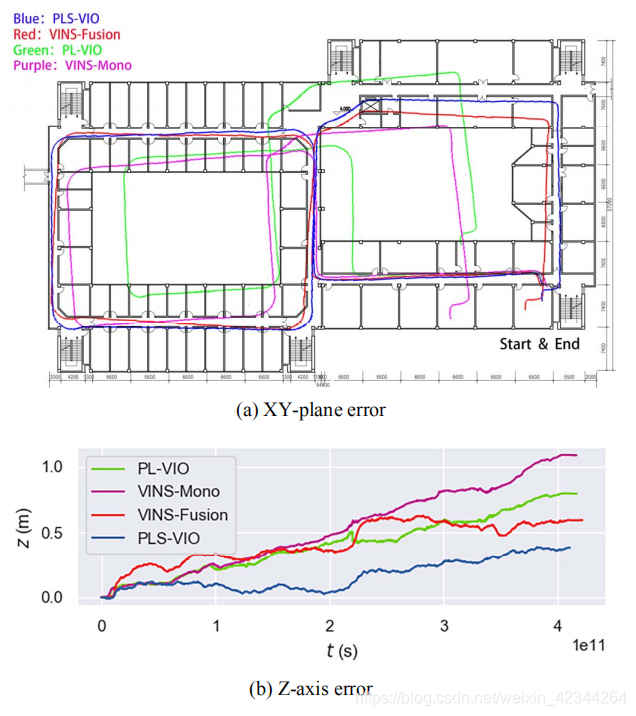
PLS-VIO: Stereo Vision-inertial Odometry Based on Point and Line Features
:已上传pdf
长走廊数据链接(双目 + IMU + Lidar(无激光视觉外参)):
链接:https://pan.baidu.com/s/113xxEnng2-JScg8masIc1w
提取码:a7dd
PLS-VIO: Stereo Vision-inertial Odometry Based on Point and Line Features
:已上传pdf
链接:https://pan.baidu.com/s/113xxEnng2-JScg8masIc1w
提取码:a7dd
道可道,非常道;名可名,非常名。 无名,天地之始,有名,万物之母。 故常无欲,以观其妙,常有欲,以观其徼。 此两者,同出而异名,同谓之玄,玄之又玄,众妙之门。