线性规划模型
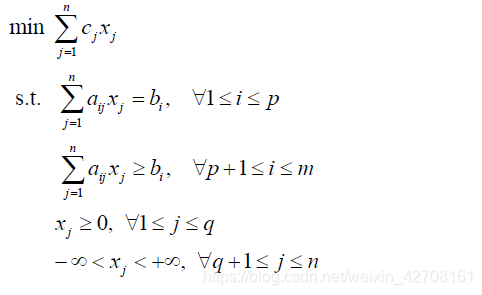
一般模型
一般模型既有不等式约束,也有等式约束;既有非负的约束决策变量,也有整个实数域上的自由决策变量。
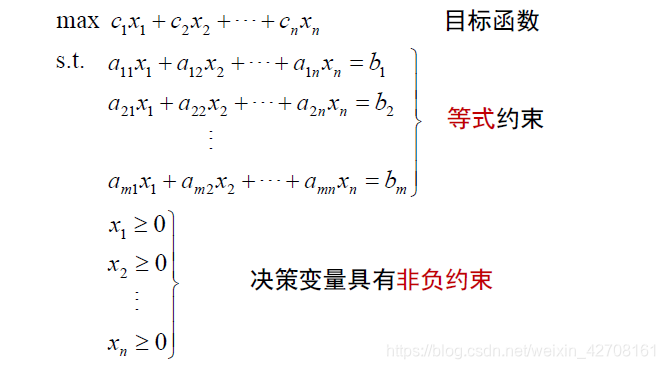
标准模型
引入冗余的决策变量,使得不等式约束转化为等式约束。这里的每个决策变量都具有非负性。
把上述模型用矩阵表示就是
m
i
n
(
o
r
m
a
x
)
C
T
X
s
.
t
A
X
=
b
⃗
X
≥
0
min(or\ max) C^TX\\ s.t \ AX=\vec{b}\\ \ X \geq 0
min(or max)CTXs.t AX=b X≥0
线性规划问题的基本假设
- 系数矩阵A的行向量线性无关。
如果线性相关有2种可能,要么是增广矩阵的该行也线性相关,则该行约束冗余,可以删去。要么增广矩阵的该行线性无关,则方程无解,优化问题不存在。 - 系数矩阵A的行数小于列数
如果行数m大于列数n,则行向量是m个n维向量,不可能线性无关。吐过行数等于列数,且行向量线性无关,则约束条件确定了唯一解,无需优化。
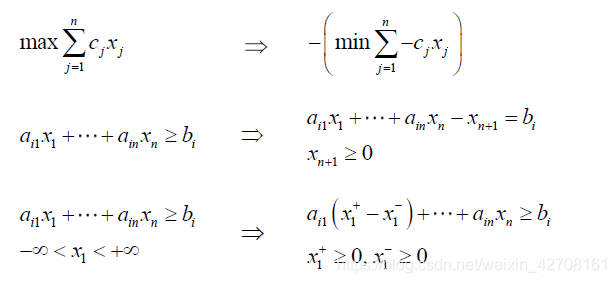
一般模型与标准模型的转化
主要方式是增加决策变量。有两种情况需要增加
- 不等式变等式,每个不等式增加一个决策变量。
- 1个自由决策变量转化为2个约束的决策变量。
线性规划问题解的可能情况
- 唯一最优解
- 没有有限的最优目标函数
- 没有可行解
- 无穷多的最优解(一维问题中不会出现)
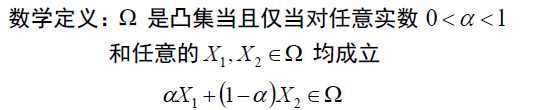
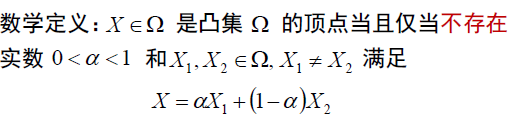
凸集
Def. 凸集:该集合中任意两个元素的凸组合仍然属于该集合。
注:此处的
α
\alpha
α不能是0或1。
Thm. 线性规划的多面体模型是凸集。
Def. 凸集的顶点:顶点无法表示成集合中其他元素的凸组合。
顶点的等价描述
从系数矩阵中抽取m列线性无关的列向量,组成可逆方阵。则由此可求得m个决策变量的值,再令其余的决策变量为0即可。
推论
- 顶点中正分量对应的系数向量线性无关。
- 一个线性规划问题标准模型最多有 C n m C_{n}^{m} Cnm个顶点。
定义总结
- 基矩阵§:系数矩阵中抽取m列线性无关的列向量组成可逆方阵。
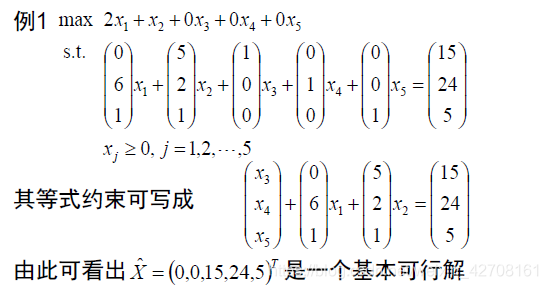
- 基本解:m个基变量有基矩阵和 b ⃗ \vec{b} b决定,剩余(n-m)个变量都置0,称之为非基变量。
- 基本可行解(顶点):基本解中可行的,即满足非负性约束
Thm. 线性规划标准模型的基本可行解就是可行集的顶点。
Thm. 标准模型的线性规划问题如有可行解,则定有基本可行解。
Thm. 线性规划标准模型中顶点的个数是有限的。
Thm. 线性规划标准模型的最优目标函数值如果有有限的目标函数值,则总在顶点处取到。
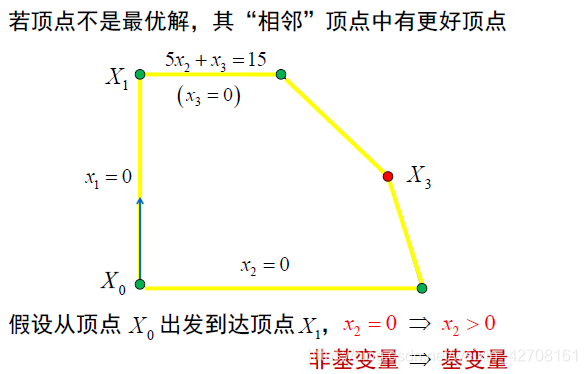
单纯形法
在顶点中沿着边搜索最优解的过程。
按照上述的原理,我们固然可以求出所有的基矩阵,进入求出所有的顶点。计算每一个顶点的目标函数值,找出其中最大的那个,但是这样做的计算量未免太大,因此有了单纯行法,即沿着边搜索顶点。
单纯形法就是一个不断的选择变量入基出基的过程。
- 假定已知一个基本可行解。(问题4)
- 如何计算选定进基变量后的基本可行解。(问题1)
- 如何选择进基变量使得目标函数值改善。(问题2)
- 如何判断已经找到最优的目标函数值。(问题3)
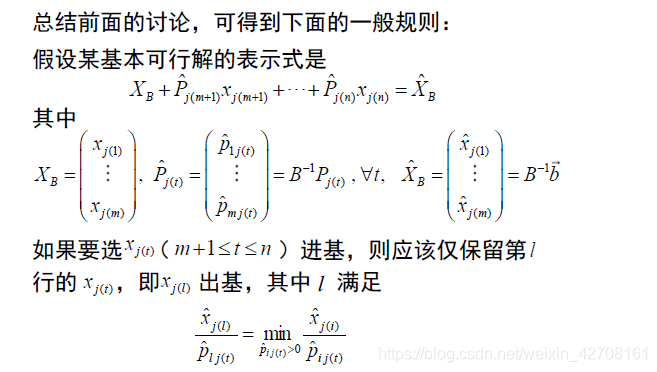
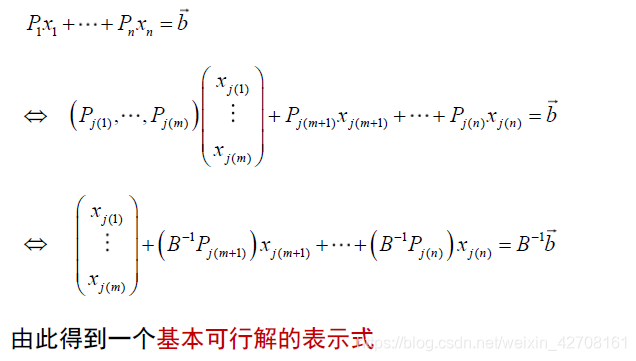
计算选定进基变量的基本可行解
Def. 基本可行解的表示式:基变量只出现在一个等式约束中。如:
此处的
x
3
,
x
4
,
x
5
x_3,x_4,x_5
x3,x4,x5就是基变量。
选定出基变量:保可行性的最小非负比值原理
由上所述,一个顶点对应一个基本可行解,其中m个基变量,(n-m)个非基变量。假定我们要选择某个非基变量
x
i
x_i
xi入基,实际上就是通过对增广矩阵做初等行变化使得
x
i
x_i
xi仅仅出现在一个等式约束中。比如我们通过变换,使得
x
i
x_i
xi仅仅出现在第j个等式约束中,如果此时仍然满足可行性,那么
x
i
x_i
xi就取代了原来在此处的基变量,成为新的基变量。
在进行初等行变换的过程中,要保证可行性,即
b
⃗
≥
0
\vec{b} \geq 0
b≥0
。因此要选择最小非负比值。请看下面的例子:
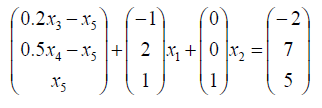
假设我们要选择
x
2
x_2
x2入基,那么就是要通过初等行变换,使得
x
2
x_2
x2的系数向量中某一行是1,其余行都是0。如我们选择
x
2
x_2
x2仅出现在第3个等式约束中,即
则此时无法保证可行性,因为
b
⃗
\vec{b}
b中第1个分量是负数。
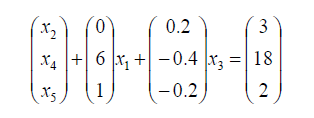
为了避免等式右侧出现负数,只能选择比值最小的一行,即第1行。即化成如下的形式:
如果此时我们想让
x
3
x_3
x3入基,此时的最小比值是第2行,即让该行为1,其余行为0。但是,为了让
x
3
x_3
x3的第二行为1,该行两端必须同时乘以一个负数,此时仍然无法保证
b
⃗
≥
0
\vec{b} \geq0
b≥0,因此只能选择系数非负的一行。
注:这里的非负性是指系数非负,而不是比值非负。即当b中某行分量是0,而该行入基变量系数是负数,仍不能入基。
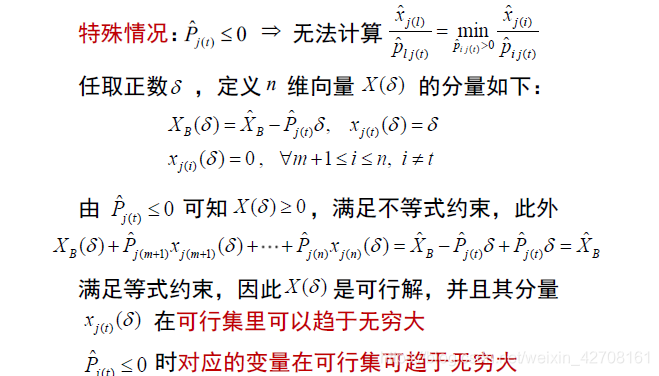
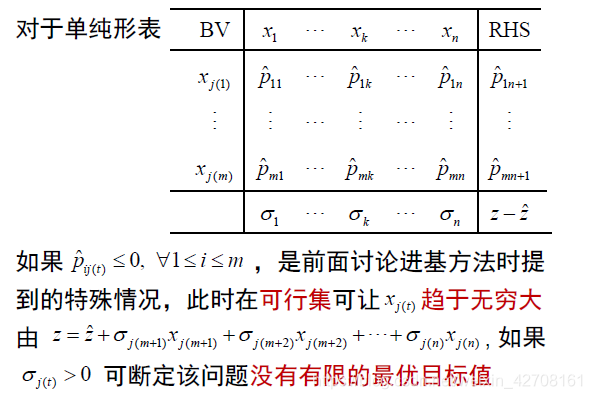
特殊情况:没有非负比值,即没有有限的目标函数值。
选择入基变量的原则
选择某个入基变量使得目标函数能改善,通过检验数选择。
此处假设优化目标是求最大值。通过等式约束,将目标函数表示成非基变量的线性组合。即
f
(
X
)
=
c
1
x
j
(
m
+
1
)
+
c
2
x
j
(
m
+
2
)
+
.
.
.
+
c
n
x
j
(
n
)
+
c
o
n
s
t
f(X)=c_1x_{j(m+1)}+c_2x_{j(m+2)}+...+c_nx_{j(n)}+const
f(X)=c1xj(m+1)+c2xj(m+2)+...+cnxj(n)+const
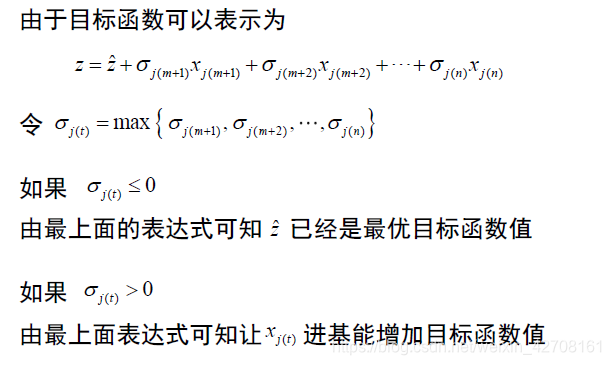
只有选择检验数是正数的变量入基才有可能使得目标函数继续增大,因为入基之后变量只可能增大或者不变,而不可能减少。
如何确定已经找到了最优的目标函数值
此处假设优化目标是求最大值。
当每个非基变量的检验数都是负数时,目标函数已经达到了最大值。
退化情况
Thm. 收敛条件:每次迭代过程中,每个基本可行解的基变量都严格大于0,则每次迭代都能保证目标函数严格增加。而基本可行解的数目是有限的,因此上述过程不会一直进行下去,因此一定能在有限次迭代过程中找到最优解。
Def. 退化情况:某些基变量是0。则多个基矩阵对应同一个退化的顶点。
Thm. 循环迭代导致不收敛:多个基矩阵对应一个顶点,即每次出基入基都换了基矩阵,但是对应的退化顶点不变,即目标函数也不变。因此可能出现在几个基矩阵之间循环不止的情况。
避免退化:由于顶点的个数是有限的,我们只需标记那些已经迭代过的顶点,即可避免循环。
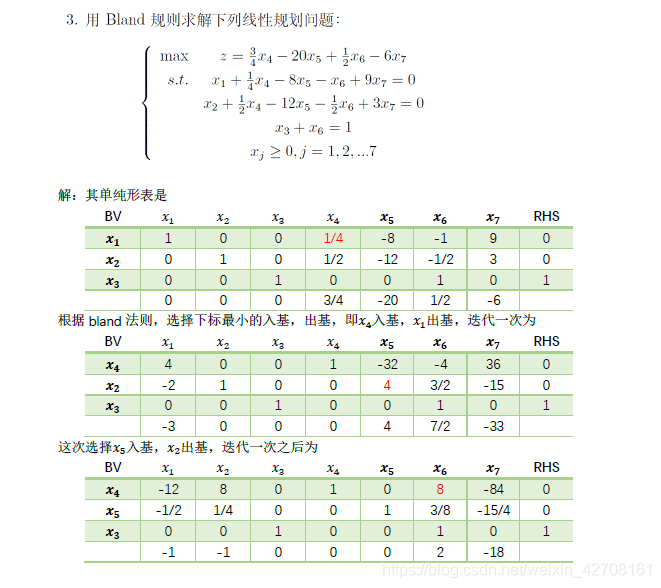
**bland法则:**始终选择下标最小的可入基和出基的变量。
当所有的基变量都严格大于0时,则这个基矩阵对应于非退化的顶点,此时可行基矩阵和顶点是一一对应的;
当某些基变量为0时,则这个基矩阵对应退化的顶点,一个退化的顶点对应数个可行基矩阵。
即给定一个可行基矩阵,一定能确定一个顶点,但是给定一个顶点时,其对应的基矩阵可能不唯一。
更一般地说,当顶点非退化时,可行基矩阵唯一;否则可行基矩阵不唯一。
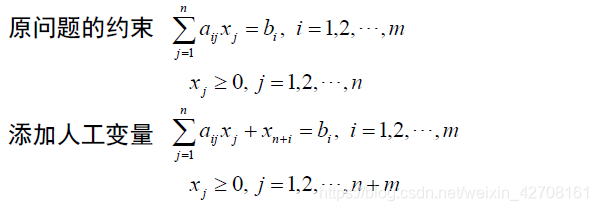
如何确定初始的基本可行解
先将一般模型转化为标准模型,然后添加人工变量,在迭代过程中将人工变量都变成非基变量,则基变量就只剩下原来的变量。
- 大M法
- 两阶段法


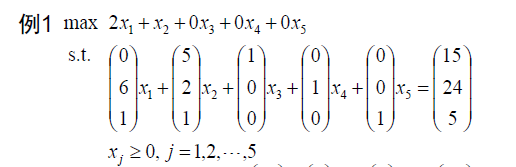
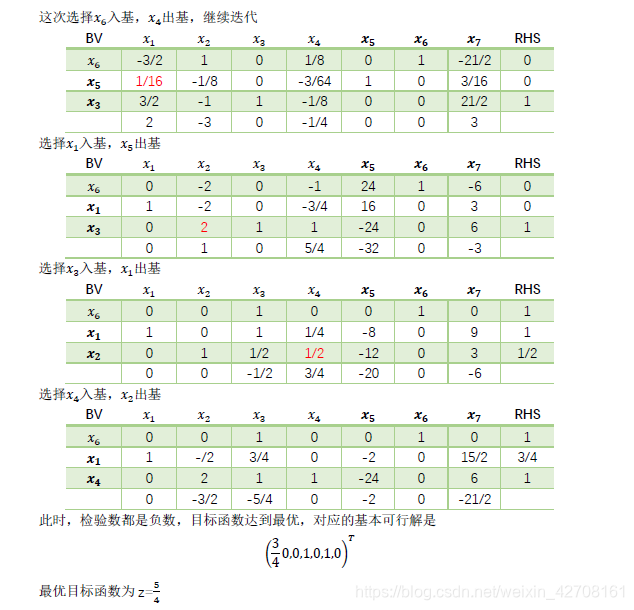
例题
本质就是不断的迭代单纯型表
一般线性规划问题总结
- 一般模型转化为标准型

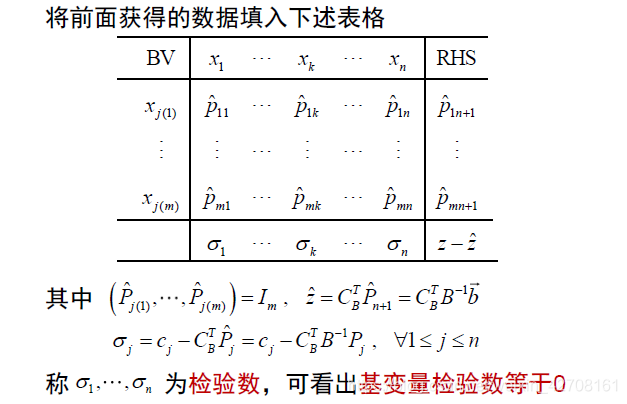
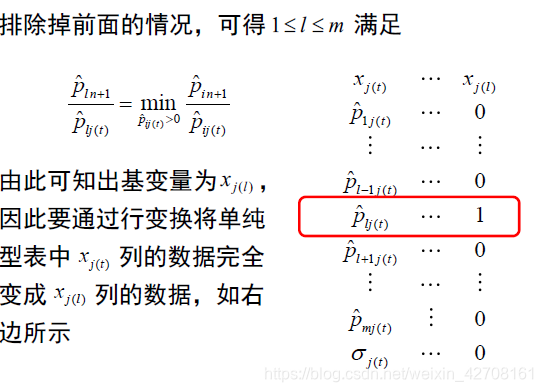
基于单纯型表迭代的实质
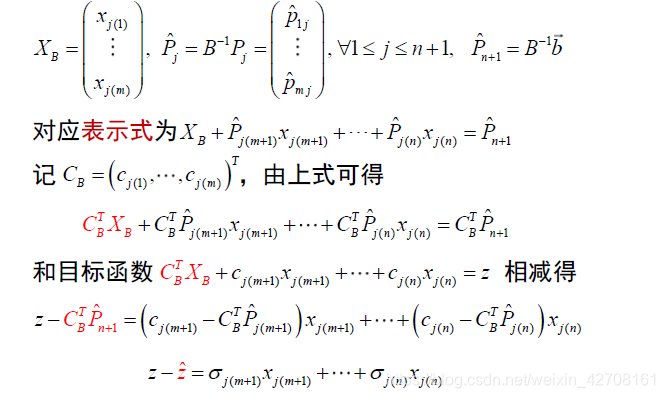
- 求出非基变量的检验数
σ j ( k ) = c j ( k ) − C B T B − 1 P j ( k ) m + 1 ≤ k ≤ n \sigma_{j(k)}=c_{j(k)}-C_{B}^{T}B^{-1}P_{j(k)}\ m+1 \leq k \leq n σj(k)=cj(k)−CBTB−1Pj(k) m+1≤k≤n - 确定进基变量
σ j ( t ) = m a x { σ j ( m + 1 ) , σ j ( m + 2 ) , . . . σ j ( n ) } \sigma_{j(t)} = max\{\sigma_{j(m+1)},\sigma_{j(m+2)},...\sigma_{j(n)}\} σj(t)=max{σj(m+1),σj(m+2),...σj(n)} - 确定出基变量
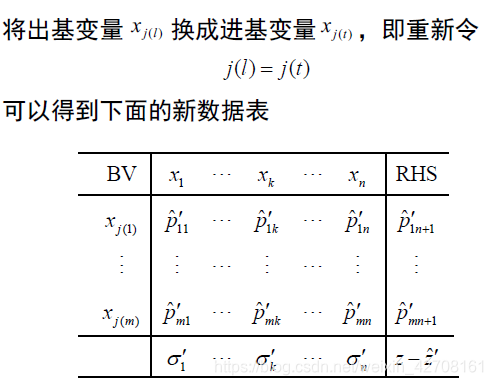
- 得到新的可行基矩阵


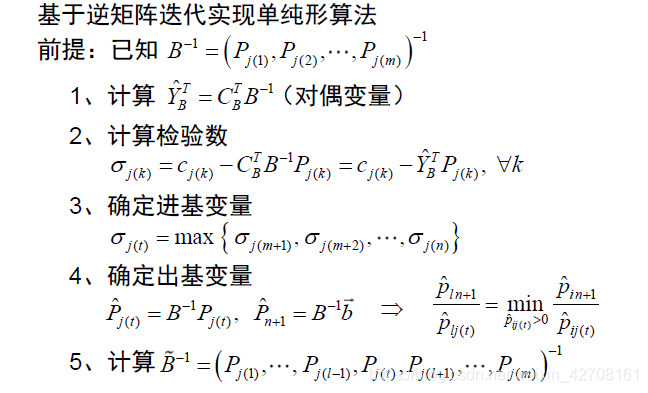
基于逆矩阵的单纯形法
核心问题:如何基于
B
−
1
B^{-1}
B−1计算出
B
−
1
~
\tilde{B^{-1}}
B−1~。这两个矩阵仅仅有1列不一样,这是一个线性代数问题,与本课程的主要内容无关,此处不再赘述。
总结:单纯形法中可能遇到的3中特殊情况。
1. 退化问题:某些基变量为0
退化问题的现象是某些基变量为0,本质是一个退化的顶点对应多个可行基矩阵,后果是可能使得单纯形法不收敛。
在选择入基变量时,应该遵循blend法则,即每次选择可入基变量下标最小的那个。
2. 没有最小非负比值。
当选定入基变量后,需要根据“保证可行性的最小非负比值原理”选定出基变量,如果没有非负比值,则说明该变量可以趋于无穷,则该问题没有有限的最优目标函数值。
3. 某个非基变量的检验数为0.
在选择入基变量时,需要将目标函数表示成非基变量的表达式。以目标值是求最大问题的为例,此时应该选择检验数大于0的非基变量入基才能改善目标函数值。
当所有非基变量的检验数都为小于等于0的时候,无论选择谁入基,都会值得目标函数变得更差,因此这时候就达到了最优条件。
有一种特殊情况是某个非基变量的检验数为0,如果选取该变量入基,则目标函数值和原来一样,但是我们得到另一组不同的基本可行解,即最优目标函数值对应了多个基本可行解,这说明原问题有无穷多最优解。
4. 退化问题和非基变量检验数为0.
前者是一个顶点对应多个可行基矩阵,后者是最优目标函数值对应多个顶点。
前者可能导致单纯形法不收敛,后者说明该问题有无穷多解。