IMU预积分模型分析
当我们考虑一个SLAM的优化问题时,每进行一次迭代优化其对应的位姿就会改变一次,由于IMU的惯性积分需要依赖于一个位姿的初值,所以导致每次迭代优化后IMU就要重新计算一次,这会导致代码运算量过大,所以我们引入了预积分的概念,即直接计算两帧之间的相对位姿,而不依赖初值。
1.预积分计算
对于预积分的计算,我们首先要弄清楚IMU的惯性积分过程。首先,我们可以不加推导的得到一个运动微分方程:
根据上述微分方程,我们可以计算出从
i
i
i时刻到
j
j
j时刻IMU积分的结果:


根据预积分的要求,需要求的是相对结果,而且不依赖于上一时刻位姿,因此需要对上式做转换。
由于
q
w
b
t
=
q
q
w
b
i
⊗
q
b
i
b
t
q_{wb_t}=qq_{wb_i} \otimes q_{b_ib_t}
qwbt=qqwbi⊗qbibt把它带入(4)-(6)式可得:

可见,此时需要积分的项就完全和
i
i
i时刻的状态无关了。为了整理公式,把积分相关的项用下面的式子代替:
实际使用中,都是使用离散形式而非连续形式.在解算中,一般采用中值积分方法,即:
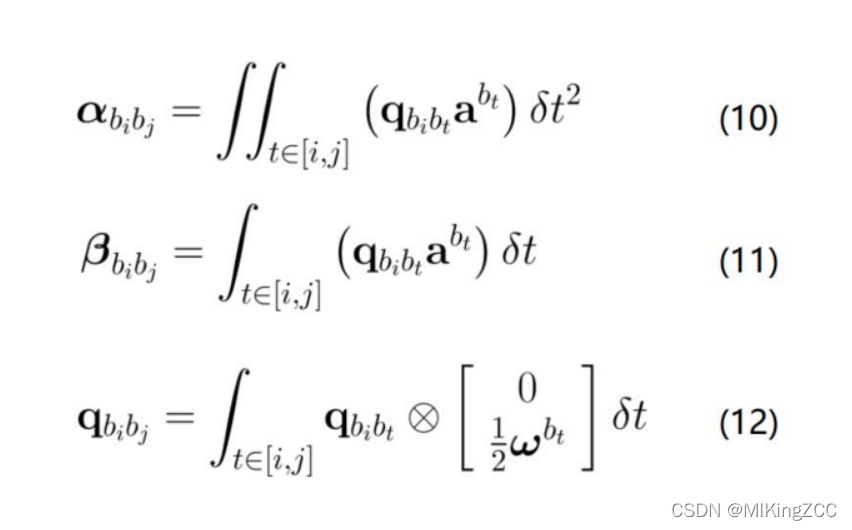
那么预积分的离散形式可以表示为:

经过以上的推导,此时状态更新的公式可以整理为:


需要注意的是,陀螺仪和加速度计的模型为:
即认为bias是在变化的,这样便于估计不同时刻的bias值,而不是整个系统运行时间内都当做常值对待。这更符合低精度mems的实际情况。但在预积分时,由于两个关键帧之间的时间较短,因此认为
i
i
i和
j
j
j时刻的bias相等。

需要注意的一点是,预积分的结果中包含了bias,在优化过程中,bias作为状态量也会发生变化,从而引起预积分结果变化。
为了避免bias变化后,重新做预积分,可以把预积分结果在bias处泰勒展开,表达成下面的形式,这样可以根据bias的变化量直接算出新的预积分结果。
其中:
此处暂时不直接给出以上各雅可比的结果,它的推导放在后面进行。



2.连续时间下预积分方差更新矩阵计算
在融合时,需要给不同信息设置权重,而权重由方差得来,因此对于IMU积分,也要计算其方差。我们首先回顾一下连续情况下的微分方程:

方差的计算方式如下:

但需注意的是,此处 F k F_k Fk和 G k G_k Gk是离散时间下的状态传递方程中的矩阵,而我们一般是在连续时间下推导微分方程,再用它计算离散时间下的传递方程。
2.1 δ θ ˙ t b k \delta \dot \theta^{b_k}_t δθ˙tbk的微分推导
为了简便写法,我们把 δ θ ˙ t b k \delta \dot \theta^{b_k}_t δθ˙tbk记为 δ θ ˙ \delta \dot \theta δθ˙
首先,我们先建立
δ
q
\delta q
δq和
δ
θ
\delta \theta
δθ的关系:

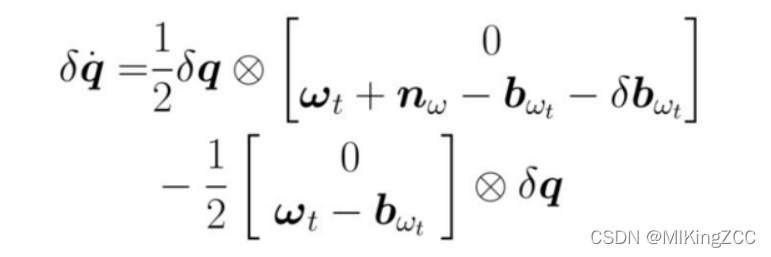
所以我们首先要先得到 δ q \delta q δq和 δ q ˙ \delta \dot q δq˙之间的关系。
1) 写出不考虑误差的微分方程

2) 写出考虑误差的微分方程

3) 写出带误差的值与理想值之间的关系

4) 将带误差的值与理想值之间的关系带入2)
其中:


5) 把1)中的关系带入4)

6) 化简方程
首先将5)中的方程移项并左乘
(
q
t
)
−
1
(q_t)^{-1}
(qt)−1可得:
又四元数相乘可以转换成矩阵与向量相乘,例如:

我们不妨把 M p M_p Mp和 M p ′ M'_p Mp′分别称为左矩阵和右矩阵。分别用 [ ∗ ] L [*]_L [∗]L和 [ ∗ ] R [*]_R [∗]R代替,因此方程可以进一步简化,我们令:
所以,我们可以得到
δ
q
\delta q
δq和
δ
q
˙
\delta \dot q
δq˙之间的关系:
又根据之前推导的
δ
q
\delta q
δq和
δ
θ
\delta \theta
δθ关系:



把它代入上式,又可以得到:
忽略其中的二阶小项,可得:


2.2 δ β ˙ t b k \delta \dot\beta^{b_k}_t δβ˙tbk的微分推导
为了简便写法,我们把 δ β ˙ t b k \delta \dot \beta^{b_k}_t δβ˙tbk记为 δ β ˙ \delta \dot \beta δβ˙
1) 写出不考虑误差的微分方程

2) 写出考虑误差的微分方程

3) 写出带误差的值与理想值之间的关系

4) 将带误差的值与理想值之间的关系带入2)

5) 把1)中的关系带入4)

6) 化简方程

2.3 δ α ˙ t b k \delta \dot\alpha^{b_k}_t δα˙tbk的微分推导
为了简便写法,我们把 δ α ˙ t b k \delta \dot \alpha^{b_k}_t δα˙tbk记为 δ α ˙ \delta \dot \alpha δα˙
1) 写出不考虑误差的微分方程

2) 写出考虑误差的微分方程

3) 写出带误差的值与理想值之间的关系

4) 将带误差的值与理想值之间的关系带入2)
5) 把1)中的关系带入4)

6) 化简方程

3.离散时间下预积分方差更新矩阵计算
得到连续时间微分方程以后,就可以计算离散时间的递推方程了,表示为:
其中:


3.1 δ θ k + 1 \delta \theta_{k+1} δθk+1的求解
由于连续时间下有:

则离散时间下应该有:

因此有:
令:
则上式可以重新写为:



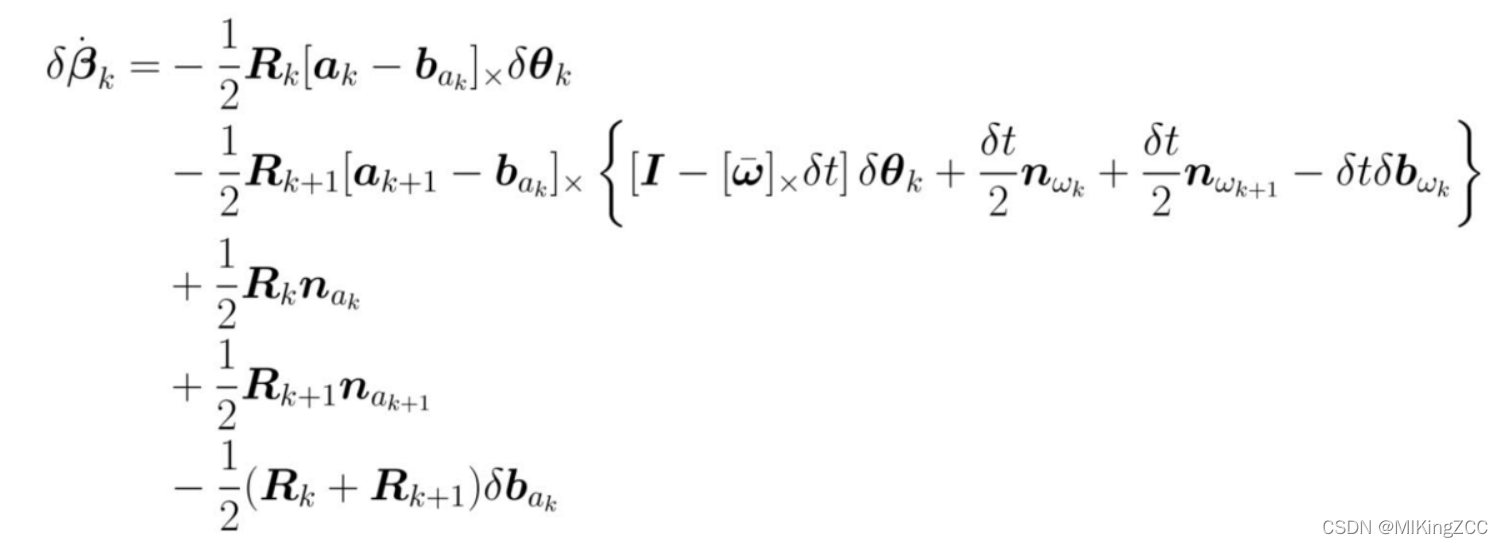
3.2 δ β k + 1 \delta \beta_{k+1} δβk+1的求解
由于连续时间下有:

则离散时间下应该有:
把3.1中求得的的
δ
θ
k
+
1
\delta \theta_{k+1}
δθk+1表达式代入上式,可得:
经过一系列合并同类项以后,最终的合并结果为:

由导数形式可以得到递推形式如下:


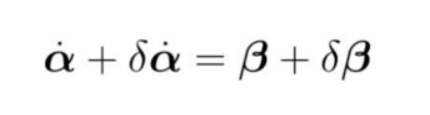
3.3 δ α k + 1 \delta \alpha_{k+1} δαk+1的求解
由于连续时间下有
δ
α
˙
=
δ
β
\delta\dot{\alpha}=\delta\beta
δα˙=δβ,则离散时间下应该有:
由导数形式可以写出递推形式:


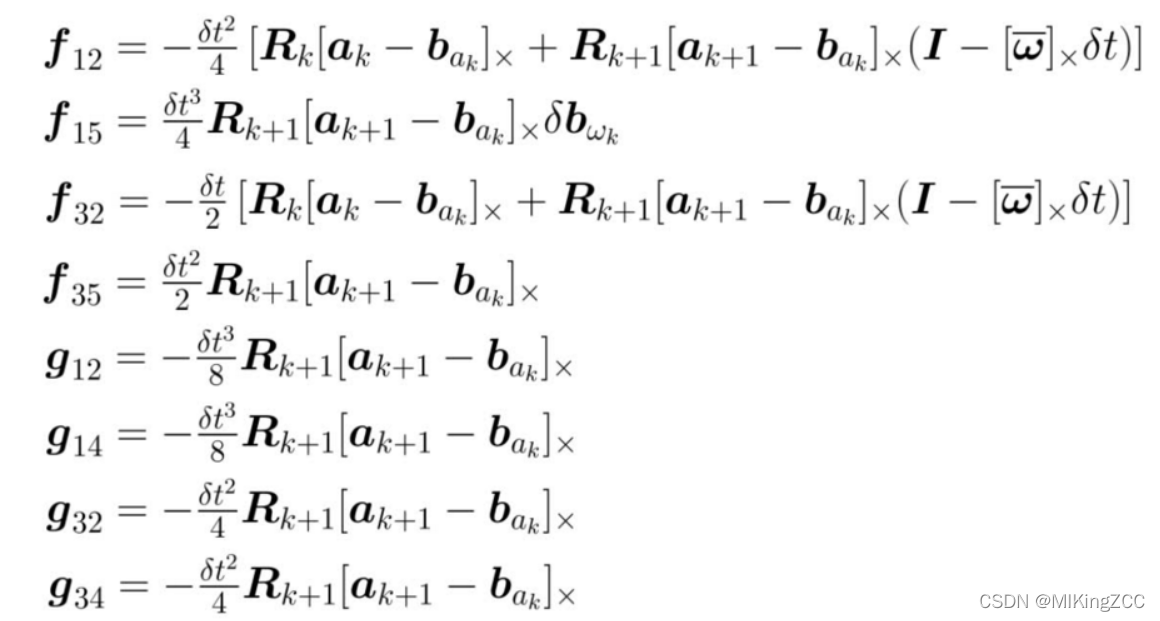
3.4 矩阵整理
由以上的推导结果,便可以写出
X
k
+
1
=
F
k
X
k
+
G
k
N
k
X_{k+1}=F_kX_k+G_kN_k
Xk+1=FkXk+GkNk中的矩阵:
上面的矩阵中,有:

4.预积分更新
回到bias变化时,预积分结果怎样重新计算的问题,再次给出它的泰勒展开形式:
这里,雅可比没有明确的闭式解,但是在推导方差的更新时,我们得到了:
通过该递推形式,可以知道:



即预积分结果的雅可比,可以通过这种迭代方式计算。
J j J_j Jj中关于bias的项,就是预积分泰勒展开时,各bias对应的雅可比。
5.残差雅可比的推导
在优化时,需要知道残差关于状态量的雅可比。由于已知姿态位姿更新的方法如下:
因此,可以很容易写出一种残差形式如下:
但是和预积分相关的量,仍然与上一时刻的姿态有关,无法直接加减,因此,把残差修正为以下形式:


待优化的变量是:
但在实际使用中,往往都是使用扰动量,因此,实际是对以下变量求雅可比



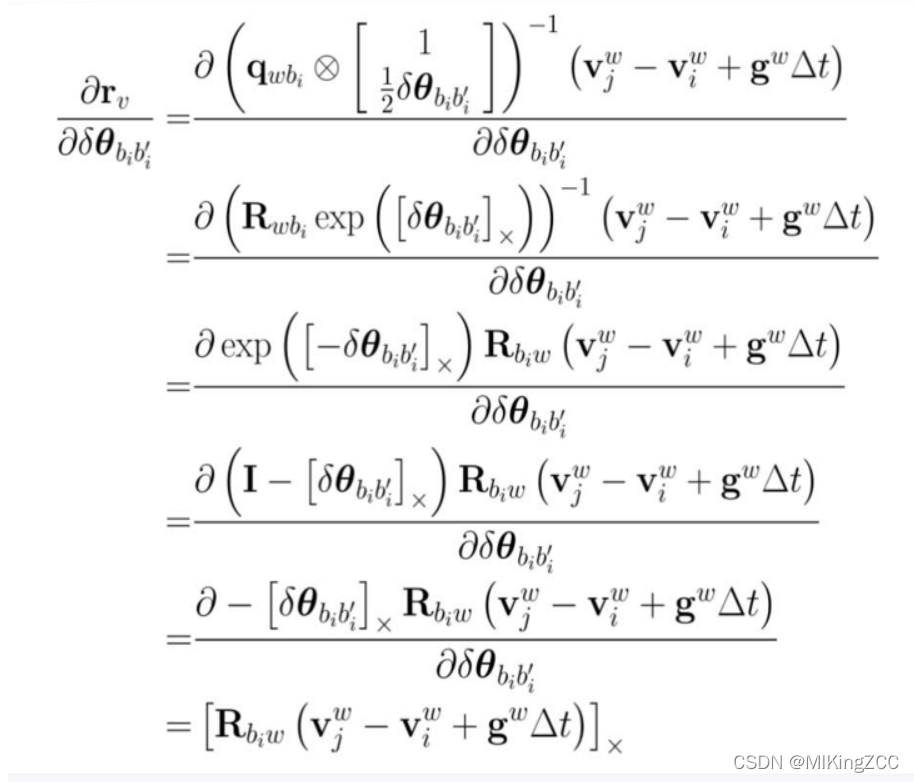
5.1 姿态残差的雅可比
1) 对 i i i时刻姿态误差的雅可比
上式可以化简为: