文章目录
一、ROS命令与节点话题查看
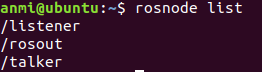
1.rosnode
终端输入:rosnode list 查看节点
如果报错,表示rose没有启动。
如果只能查看到一个节点,表示talker和listener没有运行。
正常情况下如图:


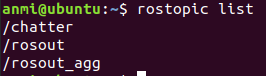
2.rostopic
终端输入:rostopic查看话题
终端输入:rostopic info /chatter 查看chatter的话题信息
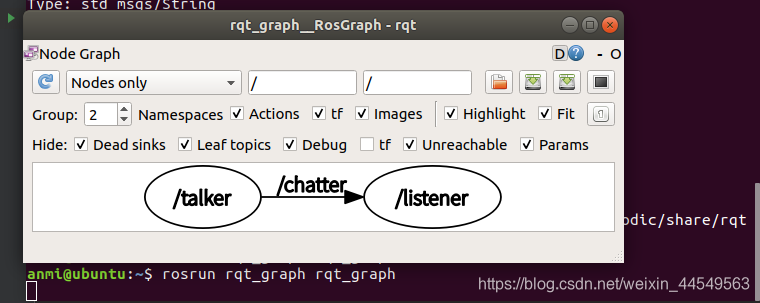
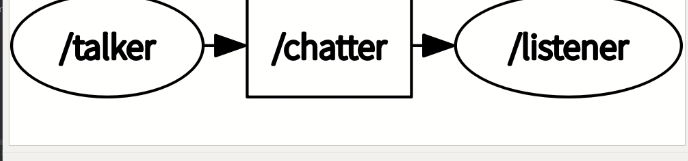
终端输入:rosrun rqt_graph rqt_graph查看节点关系图
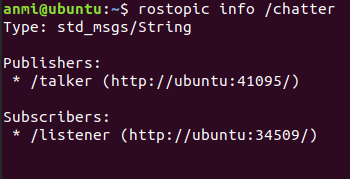
3.rostopic info/话题名称
查看话题发布的消息类型,发布者是哪个节点,接收者是哪个节点。
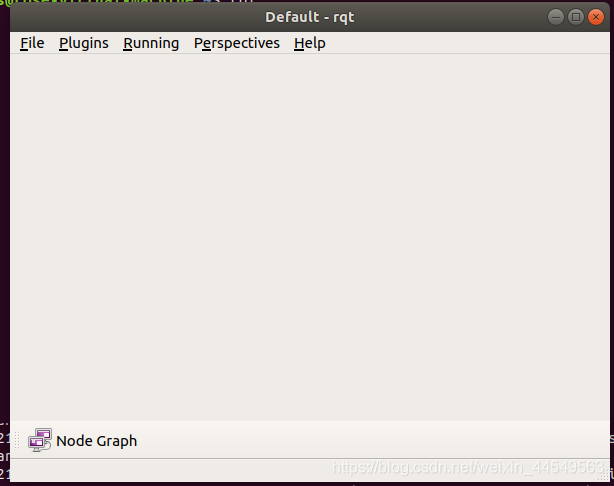
4.rosrun rqt_graph rqt_graph
打开节点图
二、rqt工具与节点话题查看
- 简洁操作:终端输入
rqt,弹出可视化操作框,piuguns–>introspection --> node graph 可以直接打开关系图 - rqt中还有很多目录,可以查看了解