运行demos airport terminal
版本:
ubuntu20.04 x64 , ros-foxy-desktop-full
安装步骤
1.下载安装rmf-demos
sudo apt-get install ros-foxy-rmf-demos-gz2.下载所需要的模型(以airport terminal为例)
ros2 run rmf_building_map_tools model_downloader rmf_demos_maps -s airport_terminal
3.运行例子
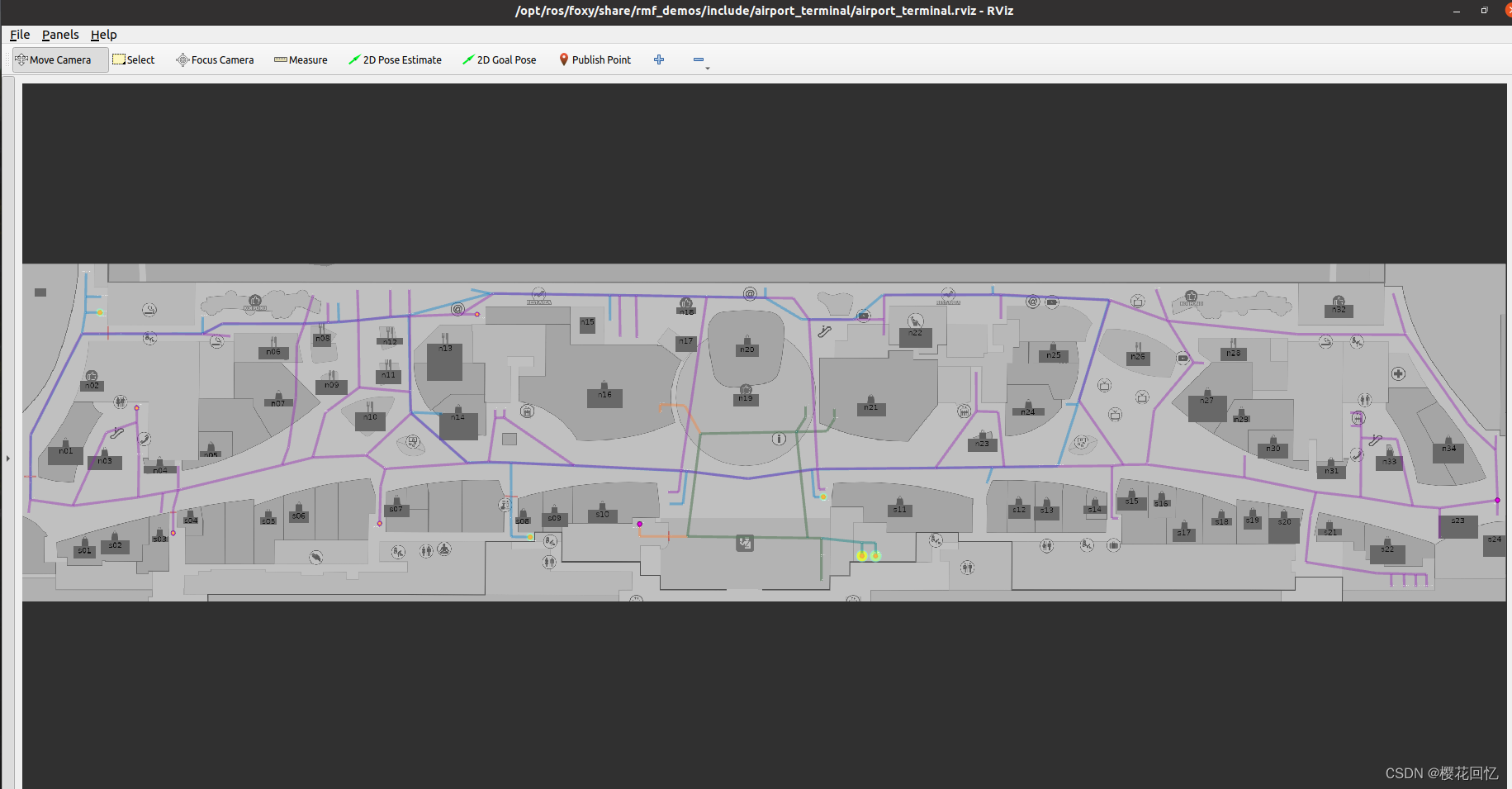
ros2 launch rmf_demos_gz airport_terminal.launch.xml
会弹出rviz 和gazebo

4. 发布任务
另起一个终端执行
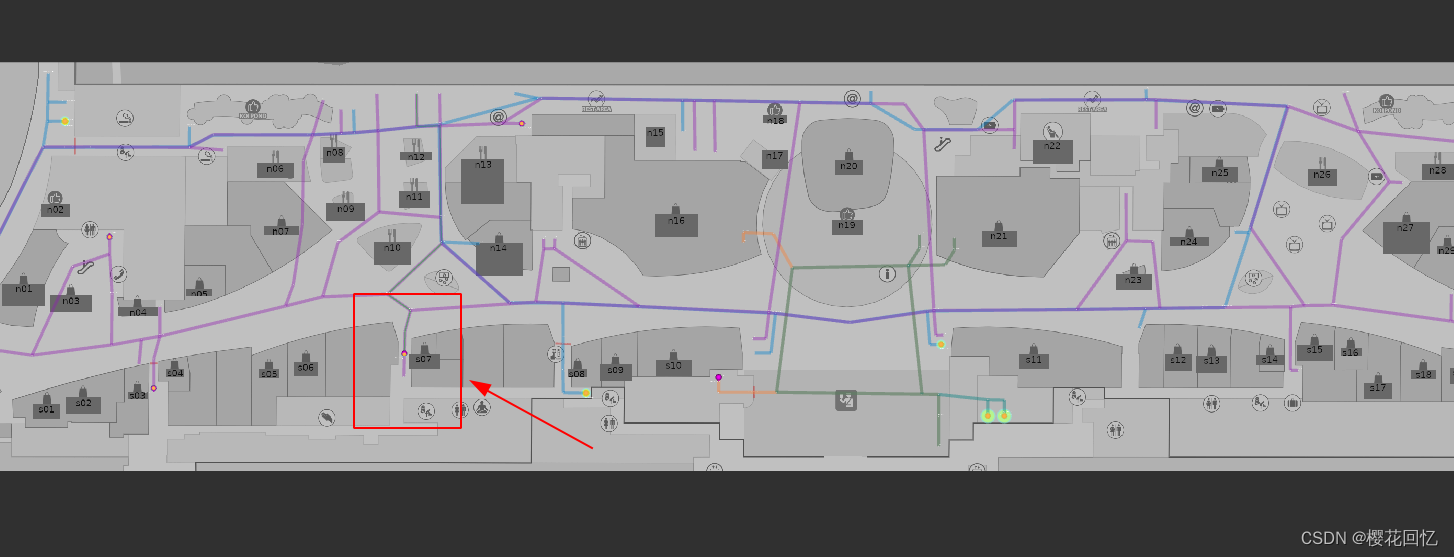
循环任务
ros2 run rmf_demos_tasks dispatch_loop -s s07 -f n12 -n 3 --use_sim_time交付任务
ros2 run rmf_demos_tasks dispatch_delivery -p mopcart_pickup -pd mopcart_dispenser -d spill -di mopcart_collector --use_sim_time清理任务
ros2 run rmf_demos_tasks dispatch_clean -cs zone_3 --use_sim_time以循环任务为例,可以看到rviz和gazebo小车动起来了

参考官方链接
Demos - Programming Multiple Robots with ROS 2
写在后面的话:
入门容易,精通难,更多人是从入门到放弃。
加油!