- ubuntu版本:ubuntu22.4
最近在学习ROS2
视频教程古月居的入门课:
视频教程
问题
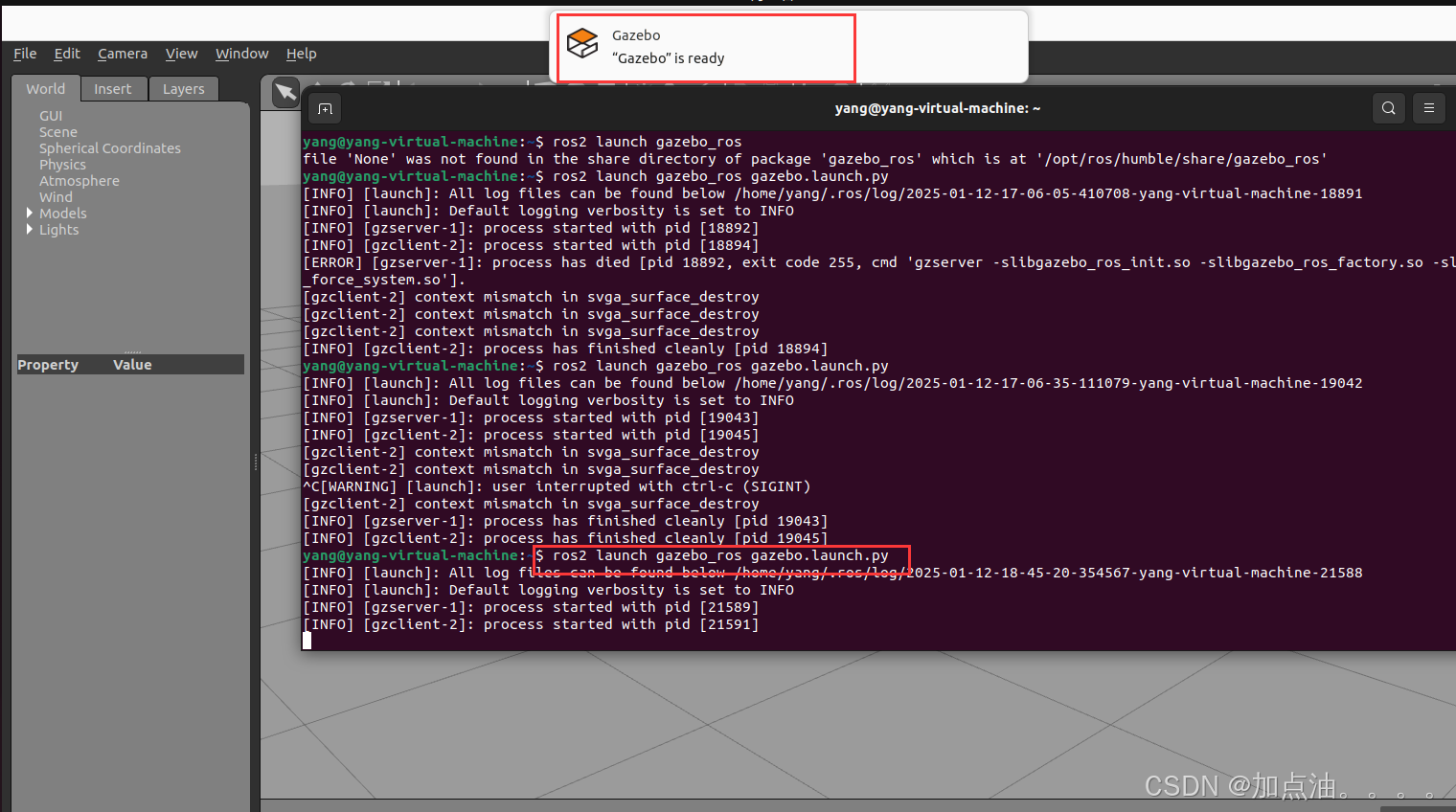
在学到关于Gazebo的时候,遇到下面问题:
运行
$ ros2 launch gazebo_ros gazebo.launch.py
在这里卡住,不弹出gazebo

解决方法
安装完Gazebo后,还需要设置一些特定的环境变量,以确保Gazebo能找到模型和其他资源。通过编辑 ~/.bashrc 文件来添加这些环境变量。以下是常用的环境变量:
- GAZEBO_MODEL_PATH:用于指定Gazebo查找模型的路径。
- GAZEBO_PLUGIN_PATH:用于指定Gazebo插件的位置。
-GAZEBO_RESOURCE_PATH:用于指定Gazebo资源(如世界文件)的位置。
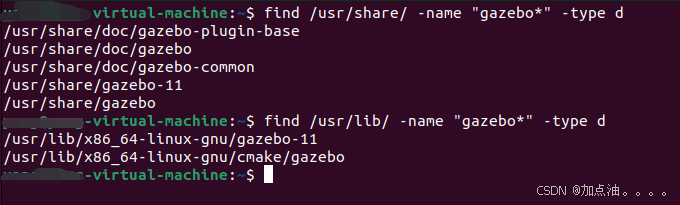
需要怎么找到这些路径:
你可以通过以下命令查找这些默认路径:
find /usr/share/ -name "gazebo*" -type d
find /usr/lib/ -name "gazebo*" -type d
添加环境变量
通过vim打开~/.bashrc文件:
sudo vim ~/.bashrc
打开 ~/.bashrc 文件并添加如下行:
# 设置Gazebo环境变量
# 设置ROS 2环境
source /opt/ros/humble/setup.bash
# 设置Gazebo环境变量
# 设置ROS 2环境
source /opt/ros/humble/setup.bash
# 设置Gazebo环境变量
export GAZEBO_MODEL_PATH=${GAZEBO_MODEL_PATH}:/usr/share/gazebo/models:/usr/share/gazebo-11/models
export GAZEBO_PLUGIN_PATH=${GAZEBO_PLUGIN_PATH}:/usr/lib/x86_64-linux-gnu/gazebo-11/plugins
export GAZEBO_RESOURCE_PATH=${GAZEBO_RESOURCE_PATH}:/usr/share/gazebo:/usr/share/gazebo-11
打开文件后,按o键进入编辑模型,将上面的添加到bashrc文件中,按esc退出编辑模型,输入:wq,退出vim
保存文件后,应用更改以使新设置生效
source ~/.bashrc
最后运行
$ ros2 launch gazebo_ros gazebo.launch.py