参考书籍《动手学深度学习(pytorch版),参考网址为:
https://tangshusen.me/Dive-into-DL-PyTorch/#/chapter05_CNN/5.1_conv-layer
https://zh-v2.d2l.ai/chapter_convolutional-neural-networks/index.html
请大家也多多支持这两个很好用的平台~
大部分内容为书中内容,也有部分自己实验和添加的内容,如涉及侵权,会进行删除。
一、 二维卷积层
卷积神经网络(convolutional neural network)是含有卷积层(convolutional layer)的神经网络。本章中介绍的卷积神经网络均使用最常见的二维卷积层。它有高和宽两个空间维度,常用来处理图像数据。本节中,我们将介绍简单形式的二维卷积层的工作原理。
1.1 二维互相关运算
虽然卷积层得名于卷积(convolution)运算,但我们通常在卷积层中使用更加直观的互相关(cross-correlation)运算。在二维卷积层中,一个二维输入数组和一个二维核(kernel)数组通过互相关运算输出一个二维数组。 我们用一个具体例子来解释二维互相关运算的含义。如图所示,输入是一个高和宽均为3的二维数组。我们将该数组的形状记为3×3或(3,3)。核数组的高和宽分别为2。该数组在卷积计算中又称卷积核或过滤器(filter)。卷积核窗口(又称卷积窗口)的形状取决于卷积核的高和宽,即2×2。图5.1中的阴影部分为第一个输出元素及其计算所使用的输入和核数组元素:0×0+1×1+3×2+4×3=19。
在二维互相关运算中,卷积窗口从输入数组的最左上方开始,按从左往右、从上往下的顺序,依次在输入数组上滑动。当卷积窗口滑动到某一位置时,窗口中的输入子数组与核数组按元素相乘并求和,得到输出数组中相应位置的元素。图5.1中的输出数组高和宽分别为2,其中的4个元素由二维互相关运算得出:
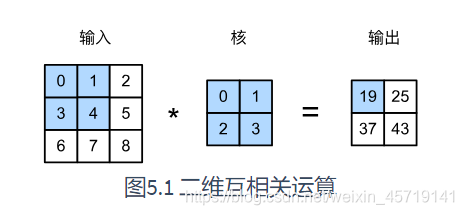
0×0+1×1+3×2+4×3=19,
1×0+2×1+4×2+5×3=25,
3×0+4×1+6×2+7×3=37,
4×0+5×1+7×2+8×3=43.
demo1:
import torch
def corr2d(X, K): # 接受输入数组X与核数组K,并输出数组Y
h, w = K.shape
Y = torch.zeros((X.shape[0] - h + 1, X.shape[1] - w + 1)) # 输出的形状
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i, j] = (X[i: i + h, j: j + w] * K).sum()
return Y
X = torch.tensor([[0, 1, 2], [3, 4, 5], [6, 7, 8]])
K = torch.tensor([[0, 1], [2, 3]])
print(corr2d(X, K))
out1:
tensor([[19., 25.],
[37., 43.]])
1.2 二维卷积层
二维卷积层将输入和卷积核做互相关运算,并加上一个标量偏差来得到输出。卷积层的模型参数包括了卷积核和标量偏差。在训练模型的时候,通常我们先对卷积核随机初始化,然后不断迭代卷积核和偏差。
下面基于corr2d函数来实现一个自定义的二维卷积层。在构造函数__init__里我们声明weight和bias这两个模型参数。前向计算函数forward则是直接调用corr2d函数再加上偏差。
class Conv2D(nn.Module):
def __init__(self, kernel_size):
super(Conv2D, self).__init__()
self.weight = nn.Parameter(torch.randn(kernel_size))
self.bias = nn.Parameter(torch.randn(1))
def forward(self, x):
return corr2d(x, self.weight) + self.bias
卷积窗口形状为p×q的卷积层称为p×q卷积层。同样,p×q卷积或p×q卷积核说明卷积核的高和宽分别为p和q。
1.3 图像中物体边缘检测
下面来看一个卷积层的简单应用:检测图像中物体的边缘,即找到像素变化的位置。首先我们构造一张6×8的图像(即高和宽分别为6像素和8像素的图像)。它中间4列为黑(0),其余为白(1)。
demo2:
# 图像中物体边缘检测
X = torch.ones(6, 8)
X[:, 2:6] = 0
print(X)
# 构造一个高和宽分别为1和2的卷积核K。当它与输入做互相关运算时,如果横向相邻元素相同,输出为0;否则输出为非0
K = torch.tensor([[1, -1]])
# 将输入X和卷积核K做互相关运算,可以看出,我们将从白到黑的边缘和从黑到白的边缘分别检测成了1和-1。其余部分的输出全是0
Y = corr2d(X, K)
print(Y)
out2:
tensor([[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.]])
tensor([[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.]])
由此,卷积层可通过重复使用卷积核有效地表征局部空间。
1.4 通过数据学习核数组
最后来看一个例子,它使用物体边缘检测中的输入数据X和输出数据Y来学习我们构造的核数组K。我们首先构造一个卷积层,其卷积核将被初始化成随机数组。接下来在每一次迭代中,我们使用平方误差来比较Y和卷积层的输出,然后计算梯度来更新权重。
demo3:
# 通过数据学习核数组
# 构造一个核数组形状是(1, 2)的二维卷积层
conv2d = Conv2D(kernel_size=(1, 2))
step = 20
lr = 0.01
for i in range(step):
Y_hat =