💯 欢迎光临清流君的博客小天地,这里是我分享技术与心得的温馨角落 💯
🔥 个人主页:【清流君】🔥 📚 系列专栏: 运动控制 | 决策规划 | 机器人数值优化 📚 🌟始终保持好奇心,探索未知可能性🌟



摘要
本篇文献提出了一种基于数字孪生模型的无人驾驶地面车辆( UGV )交叉口避碰规划与控制策略。
- 建立了
UGV的DT系统,包括四个层次,即,物理空间、虚拟空间、应用服务和数据处理。 - 在虚拟空间中,根据实时环境和障碍物信息,采用
A-star算法和二次规划相结合的方法进行避碰轨迹规划。 - 以规划轨迹为期望轨迹,设计了一种双向跟踪控制方法,实现了虚拟
UGV和物理UGV的同步跟踪。 - 在双向跟踪控制方法中,设计了非线性扩张状态观测器、运动控制器和有限时间滑模控制器。
实验结果表明了基于 DT 系统的 UGV 避碰规划与控制策略的有效性和优越性。
一、简介
1.1 无人驾驶地面车辆的在交叉口应用背景
在当今人工智能领域,无人驾驶地面车辆 UGV 被广泛应用于物流、仓储、生活服务和军事等场景。随着其应用的增加,确保 UGV 在交叉口等共用道路上的安全与防撞操作变得尤为重要。
为此,研究提出了一种系统方法,以便在缺乏全局协调的情况下实现交叉口的协作运动。此外,利用有监督算法解决车间调度问题,以防止车辆侧面碰撞的策略也得到了发展。
1.2 传统防撞方法及其局限性
传统的防撞方法依赖于激光雷达、摄像头和红外传感器等技术,进行路径规划和避障,但往往需要高性能的机载计算机和昂贵的实验验证。
1.3 数字孪生技术的引入与优势
数字孪生 DT 技术的引入为 UGV 提供了更高效的模拟与优化手段,通过在虚拟环境中进行测试,改善物理实体的运行性能,降低成本。 DT 技术通过建立虚拟实体,实时监控并优化机器人与环境之间的交互,有效实现 UGV 的碰撞避免。
1.4 A-star 算法与二次规划在 UGV 轨迹规划中的应用
A
A
A - star 算法作为一种常见的轨迹规划工具,能够在虚拟空间中为 UGV 提供最优轨迹。然而,在将轨迹点作为 UGV 的目标轨迹之前,需要对这些点进行多项式拟合与优化。结合二次规划方法,可以为 UGV 在高速公路等场景中避开动态障碍物提供最佳轨迹。
1.5 基于 ESO 和 SMC 的双向跟踪控制方案
为了实现物理 UGV 和虚拟 UGV 之间的双向跟踪控制,设计了基于扩展状态观测器 ESO 和滑模控制 SMC 的方案,以应对外部干扰和动力学不确定性。最终,本研究旨在通过基于 DT 技术的 UGV 避碰轨迹规划与控制策略,提升 UGV 在交叉口的运行效率,并降低开发成本。
1.6 主要贡献
-
1 1 1 )基于
DT技术,在虚拟空间中完成避碰轨迹规划,以提高操作效率,减少UGV的计算负担。 -
2 2 2 )提出了一种双向跟踪控制方法,实现了物理
UGV和虚拟UGV在不同扰动下对规划轨迹的同步跟踪。 -
3 3 3 )在有限时间滑模控制器中引入非线性连续饱和函数,以适应规划速度的快速变化,并保证速度误差的快速收敛。
本文的组织结构如下:
- 第二部分:介绍了一个用于
UGV的四层DT系统。 - 第三部分:给出了
UGV的运动学模型和动力学模型。 - 第四部分:基于
DT系统对UGV的避碰规划和控制策略进行了研究。 - 第五部分:给出了实验结果,第六节给出了结论。
二、数学问题与DT系统
2.1 相关工作
在交叉口无人驾驶地面车辆 UGV 防撞应用领域,已在避碰技术、算法和控制策略方面取得显著进展。数字孪生 DT技术在多个行业快速发展,尽管其在 UGV 管理中的应用尚不普遍,但潜力巨大。避碰作为 UGV 导航的重要部分,促使了多种算法的提出,特别是 A-star 和快速搜索随机树等路径规划算法,依赖激光雷达和摄像头等传感器获取障碍物信息。
UGV 控制策略也在动态环境中取得了进展,传统的 PID 控制因其简单有效被广泛应用,而自抗扰控制和滑模控制 SMC 等先进技术则适用于更复杂的不确定环境。本研究旨在通过集成 DT 技术,提升 UGV 在交叉口的安全性和效率,增强控制能力并降低开发成本。
2.2 问题描述
基于 DT 技术设计了一种有效的 UGV 交叉口避碰规划与控制策略。下图显示了 UGV 在交叉口遇到横向接近的障碍车辆。
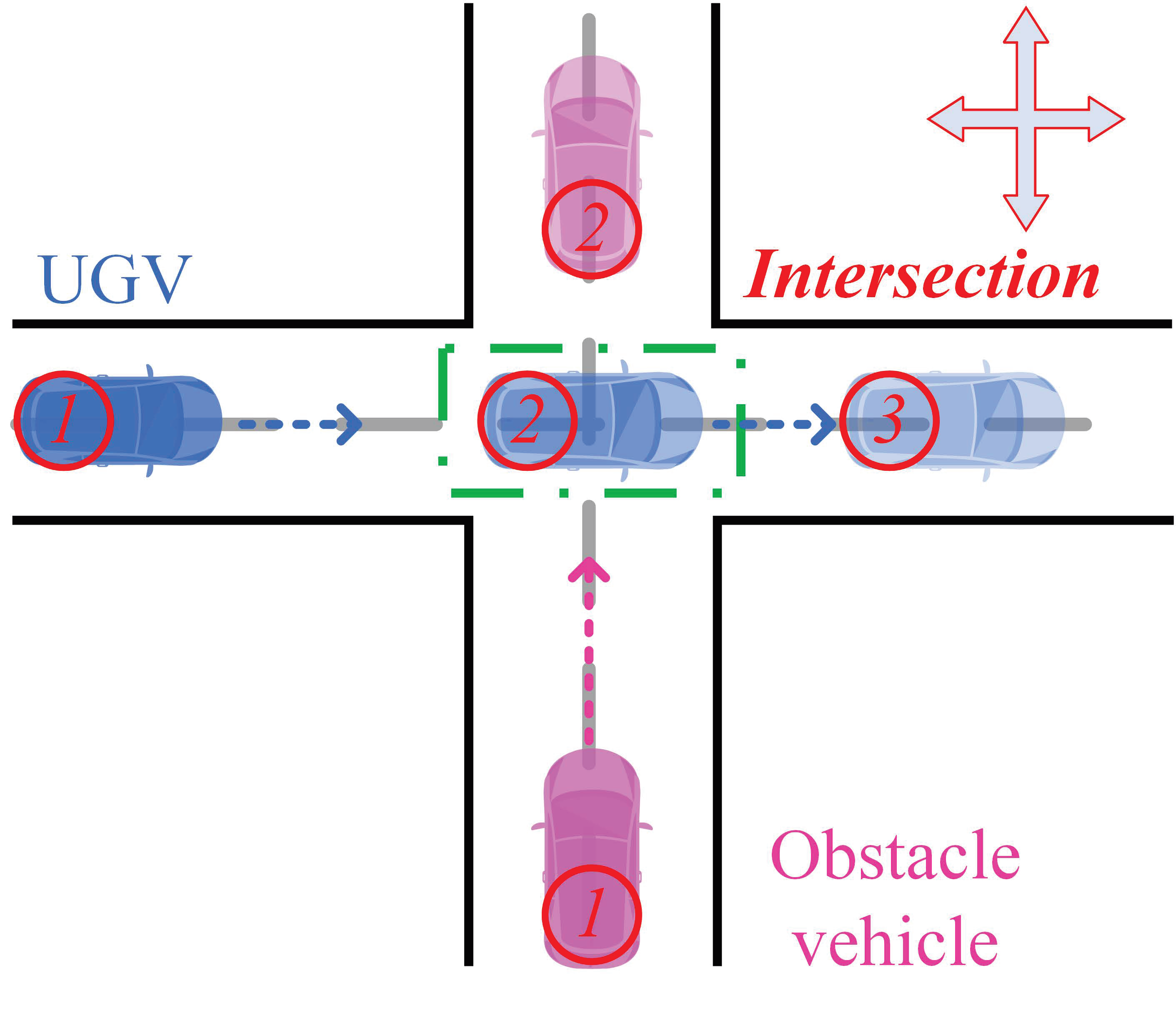
注意: UGV 与障碍车辆的交叉路口的距离和速度相同,一般情况下, UGV 在感应到障碍车辆后,会停车等待其通过交叉口,上图中, UGV 避让障碍车辆的过程通过表示不同时刻的序号来描述。
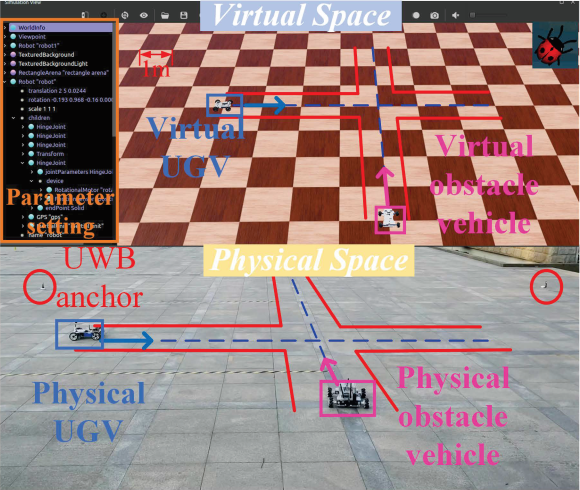
2.3 数字孪生系统
建立四层 DT 系统,为实现 UGV 虚拟物理空间信息交换、运动可视化监控、避碰规划与控制奠定了基础。 DT 系统的详细架构如图所示。
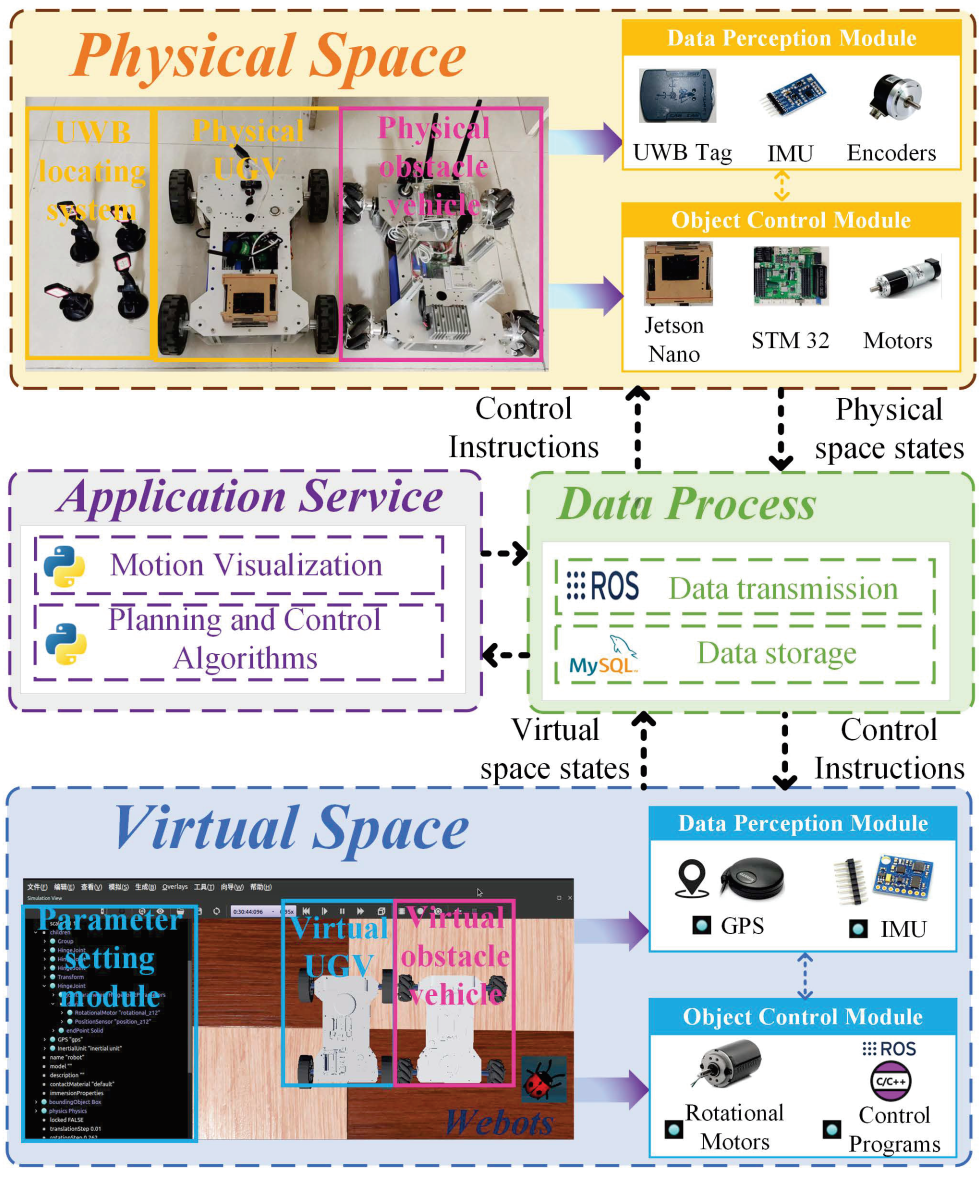
(1) 物理空间层
在上图的黄色方框中,物理空间包括物理 UGV 、物理障碍车辆和超宽带( UWB )定位系统。一个刚体、两个转向前轮和两个驱动后轮组成了实体无人车的机构。此外,物理 UGV 还配备了惯性测量单元( IMU ),四个带编码器的电机,
S
T
M
32
STM 32
STM32 微控制器, Jetson Nano 微计算机和 UWB 标签。各部分功能如下:
- IMU中的加速度计和陀螺仪:测量物理
UGV的加速度和角度信息。 - 电机:驱动前轮和后轮,编码器反馈车轮速度信号。
- STM32微控制器:作为物理
UGV的底层核心,用于外部通信和电机控制。 - 装有机器人操作系统(ROS)的Jetson Nano 微型计算机:可以对实体
UGV进行二次开发。 - UWB标签:作为超宽带定位系统的一部分,被固定在物理
UGV上,以获取实时位置信息。
此外,物理障碍车辆用作交叉路口下的障碍车辆。
(2) 虚拟空间层
在上图的蓝框中,虚拟空间是基于 Webots 开源仿真软件构建的物理空间的镜像
3
D
3D
3D 模型。虚拟空间的构建步骤如下。
-
1
1
1 )3D模型:基于实体
UGV的定量特征,利用三维建模软件等比例构建虚拟UGV的三维模型。 -
2
2
2 )环境构建:在
Webots中设置一个足够大的矩形空间,作为虚拟无人车的事件空间。 -
3
3
3 )参数设定:将虚拟
UGV的三维模型导入Webots中,并为其添加机器人节点,通过与物理UGV一致的机器人节点,为虚拟UGV设置质量、刚体属性、运动约束等物理属性。 -
4
4
4 )电机和传感器:在前后轮设置电机和编码器,实现虚拟无人车的运动控制。在虚拟
UGV上安装了全球定位系统(GPS)和IMU,以获取实时位置和角度信息。
基于 Webots 与 ROS 的实时通信,在 ROS 上开发控制程序,实现对虚拟无人车的操作。同样,虚拟障碍车在静态和动态特性方面与物理障碍车严格一致。
(3) 应用服务层
应用服务如上图中的紫色框所示。应用服务作为 DT 系统的核心维度,承担着运营管理和技术支持的角色。虚拟空间中的虚拟 UGV 在静态属性维度和动态动作维度上同步映射物理空间中的物理 UGV 。因此,应用服务通过调用 Webot 来管理物理空间的
3
D
3D
3D 运动可视化。
针对本文所研究的交叉口条件,设计了虚拟无人车和实体无人车的避碰轨迹规划和控制算法。在虚拟空间中设计了一种全局轨迹规划方法,实现了虚拟无人车的避碰。本研究的双向跟踪控制方法实现了实体 UGV 的交叉口防撞。
(4) 数据处理层
在上图的绿色框中,数据进程的任务是处理来自物理空间、虚拟空间和应用服务的数据。基于上述 ROS 主题通信方法,数据进程接收来自虚拟空间和物理空间的状态数据,并通过应用服务计算后发送控制指令数据。
此外,来自其他层的数据通过 MySQL 数据库存储。来自物理空间、虚拟空间和应用服务的数据的传输和存储驱动 DT 系统的适当功能。
三、初步设计
3.1 系统建模
在下图描绘了虚拟 UGV 在全局坐标{
X
X
X ,
0
0
0 ,
Y
Y
Y }中的运动学分析。
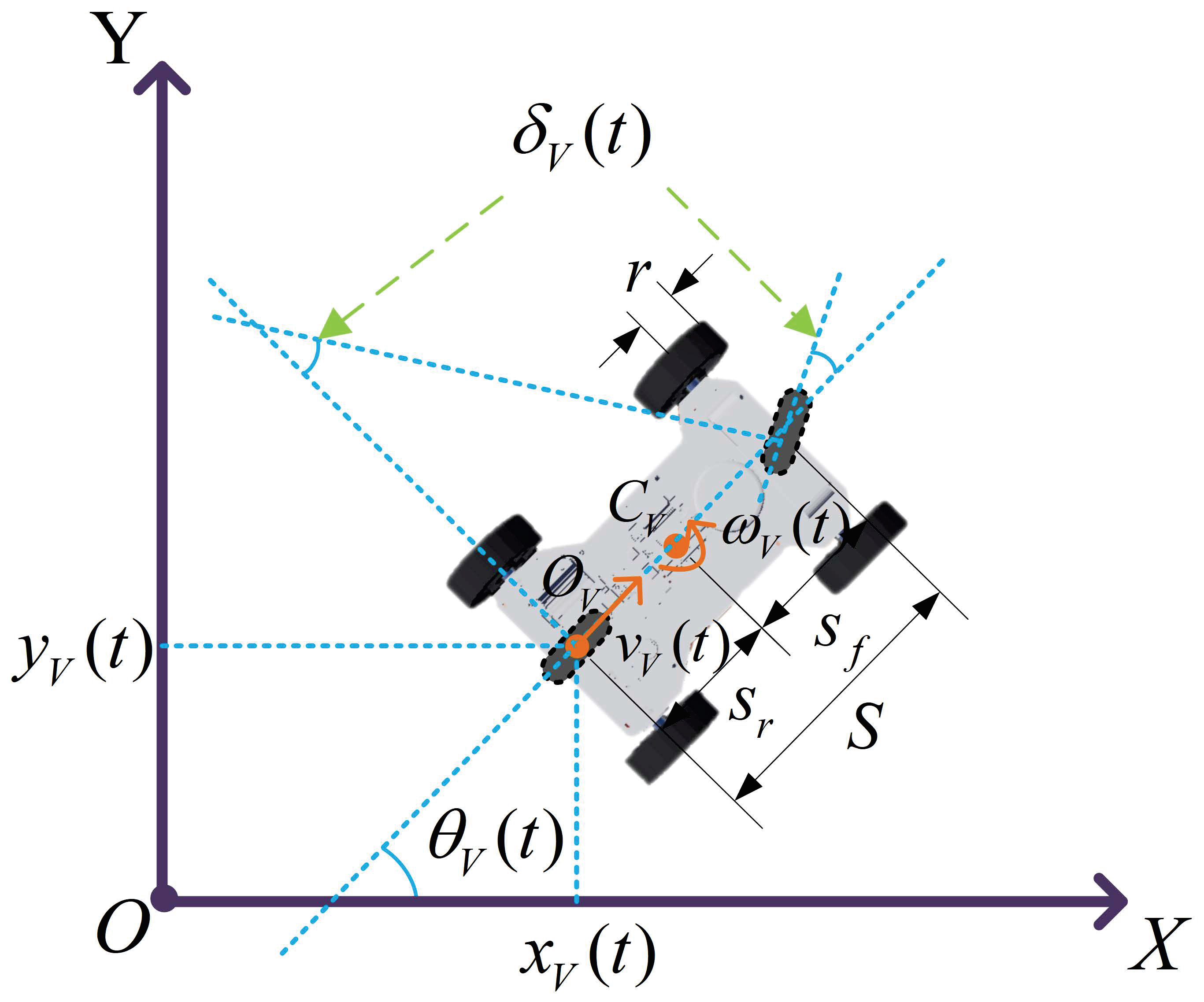
在上图中,
C
V
C_V
CV是虚拟 UGV 的重心,
O
V
O_V
OV是两个后轮的中点,
r
r
r 表示车轮半径,
S
S
S 表示车身长度,
s
f
s_f
sf 和
s
r
s_r
sr 分别表示到前后轮
C
V
C_V
CV的长度
Q
V
(
t
)
=
(
x
V
(
t
)
,
y
V
(
t
)
,
θ
V
(
t
)
)
Q_V(t)= ( x _ { V } ( t ) , y _ { V } ( t ) , \theta _ { V } ( t ) )
QV(t)=(xV(t),yV(t),θV(t))表示虚拟 UGV 在全局坐标 {
X
,
O
,
Y
X ,O, Y
X,O,Y} 上的位置,
δ
V
(
t
)
δ _V ( t )
δV(t) 表示前轮偏转角,
v
V
(
t
)
v_V ( t )
vV(t)表示线速度
ω
V
(
t
)
=
v
V
(
t
)
tan
(
δ
V
(
t
)
)
/
S
\omega _ { V } ( t ) = v _ { V } ( t ) \tan ( \delta _ { V } ( t ) ) / S
ωV(t)=vV(t)tan(δV(t))/S表示角速度。令
V
V
(
t
)
=
[
v
V
(
t
)
,
ω
V
(
t
)
]
T
V _ { V } ( t ) = \left[ v _ { V } ( t ) , \omega _ { V } ( t ) \right] ^ { T }
VV(t)=[vV(t),ωV(t)]T得虚拟 UGV 的运动学模型为
Q
˙
V
(
t
)
=
L
(
θ
V
(
t
)
)
V
V
(
t
)
(1)
\dot { Q } _ { V } ( t ) = L ( \theta _ { V } ( t ) ) V _ { V } ( t )\tag{1}
Q˙V(t)=L(θV(t))VV(t)(1)其中
L
(
θ
V
(
t
)
)
=
[
cos
(
θ
V
(
t
)
)
0
sin
(
θ
V
(
t
)
)
0
0
1
]
L(\theta_V(t))=\begin{bmatrix}\cos(\theta_V(t))&0\\\sin(\theta_V(t))&0\\0&1\end{bmatrix}
L(θV(t))=
cos(θV(t))sin(θV(t))0001
根据文献,虚拟 UGV 的动力学模型如下所示:
m
v
˙
V
(
t
)
=
τ
V
r
(
t
)
r
+
F
x
f
(
t
)
+
F
x
r
(
t
)
I
z
ω
˙
V
(
t
)
=
τ
V
f
(
t
)
+
F
y
f
(
t
)
s
f
+
F
y
r
(
t
)
s
r
(2)
m \dot { v } _ { V } ( t ) = \frac { \tau _ { V r } ( t ) } { r } + F _ { x f } ( t ) + F _ { x r } ( t ) \\ I _ { z } \dot { \omega } _ { V } ( t ) = \tau _ { V f } ( t ) + F _ { y f } ( t ) s _ { f } + F _ { y r } ( t ) s _ { r }\tag{2}
mv˙V(t)=rτVr(t)+Fxf(t)+Fxr(t)Izω˙V(t)=τVf(t)+Fyf(t)sf+Fyr(t)sr(2)其中
m
m
m 和
I
z
I_z
Iz 分别为质量和转动惯量,
τ
V
r
(
t
)
τ_{ Vr} ( t )
τVr(t)和
τ
V
f
(
t
)
τ _{Vf} ( t )
τVf(t)分别为后轮和前轮的电机扭矩。前轮和后轮的纵向阻力
F
x
f
(
t
)
F_{xf} ( t )
Fxf(t)和
F
x
r
(
t
)
F_{xr} ( t )
Fxr(t)给出为:
F
x
f
(
t
)
=
−
μ
s
x
S
m
g
−
1
4
C
d
A
s
ρ
a
v
V
(
t
)
F
x
r
(
t
)
=
−
μ
s
f
S
m
g
−
1
4
C
d
A
s
ρ
a
v
V
(
t
)
(3)
F _ { x f } ( t ) = - \mu \frac { s _ { x } } { S } m g - \frac { 1 } { 4 } C _ { d } A _ { s } \rho _ { a } v _ { V } ( t ) \\ F _ { x r } ( t ) = - \mu \frac { s _ { f } } { S } m g - \frac { 1 } { 4 } C _ { d } A _ { s } \rho _ { a } v _ { V } ( t )\tag{3}
Fxf(t)=−μSsxmg−41CdAsρavV(t)Fxr(t)=−μSsfmg−41CdAsρavV(t)(3)式中,µ是车轮与地面之间的摩擦系数,
g
g
g 是重力加速度,
C
d
C_d
Cd 是空气动力阻力系数,
A
s
A_s
As 是有效横截面积,
ρ
a
ρ_a
ρa 是空气密度。对于有限的车轮侧滑角,前轮和后轮的横向阻力
F
y
f
(
t
)
F_{yf} ( t )
Fyf(t)和
F
y
r
(
t
)
F_{yr} (t )
Fyr(t)可通过下式获得:
F
y
f
(
t
)
=
−
C
f
s
f
ω
V
(
t
)
v
V
(
t
)
F
y
r
(
t
)
=
C
r
s
r
ω
V
(
t
)
v
V
(
t
)
(4)
F _ { y f } ( t ) = - C _ { f } s _ { f } \frac { \omega _V ( t ) } { v _V ( t ) } \\ F _ { y r } ( t ) = C _ { r } s _ { r } \frac { \omega _V ( t ) } { v_V ( t ) }\tag{4}
Fyf(t)=−CfsfvV(t)ωV(t)Fyr(t)=CrsrvV(t)ωV(t)(4)其中,
C
f
C_f
Cf 和
C
r
C_r
Cr 分别是前轮和后轮的侧偏刚度。结合等式(
2
2
2 )(
4
4
4 ),动态模型(
2
2
2 )被重写为:
V
˙
V
(
t
)
=
B
Γ
V
(
t
)
+
Ξ
V
(
t
)
\dot { V } _ { V } ( t ) = B \Gamma _ { V } ( t ) + \varXi _ { V } ( t )
V˙V(t)=BΓV(t)+ΞV(t)其中
B
=
[
1
m
r
0
0
1
I
z
]
,
Γ
V
(
t
)
=
[
τ
V
r
(
t
)
τ
V
f
(
t
)
]
,
Ξ
V
(
t
)
=
[
f
V
r
(
t
)
f
V
f
(
t
)
]
B=\begin{bmatrix}\frac{1}{mr}&0\\0&\frac{1}{I_z}\end{bmatrix}, \Gamma_V(t)=\begin{bmatrix}\tau_{Vr}(t)\\\tau_{Vf}(t)\end{bmatrix}, \Xi_V(t)=\begin{bmatrix}f_{Vr}(t)\\f_{Vf}(t)\end{bmatrix}
B=[mr100Iz1],ΓV(t)=[τVr(t)τVf(t)],ΞV(t)=[fVr(t)fVf(t)]
f
V
(
t
)
=
−
μ
g
−
1
2
m
C
a
A
s
ρ
a
v
V
(
t
)
f
V
(
t
)
=
(
C
r
s
r
2
−
C
f
s
f
2
)
ω
V
(
t
)
I
z
v
V
(
t
)
f _ { V } ( t ) = - \mu g - \frac { 1 } { 2 m } C _ { a } A s \rho _ { a } v _ { V } ( t ) \\ f _ { V } ( t ) = \frac { ( C _ { r } s _ { r } ^ { 2 } - C _ { f } s _ { f } ^ { 2 } ) \omega _ { V } ( t ) } { I _ { z } v _ { V } ( t ) }
fV(t)=−μg−2m1CaAsρavV(t)fV(t)=IzvV(t)(Crsr2−Cfsf2)ωV(t)以同样的方式,物理 UGV 的运动学模型被示出为:
Q
˙
P
(
t
)
=
L
(
θ
P
(
t
)
)
V
P
(
t
)
\dot { Q } _ { P } ( t ) = L ( \theta _ { P } ( t ) ) V _ { P } ( t )
Q˙P(t)=L(θP(t))VP(t)其中
Q
P
(
t
)
=
(
x
P
(
t
)
,
y
P
(
t
)
,
θ
P
(
t
)
)
Q _ { P } ( t ) = ( x _ { P } ( t ) , y _ { P } ( t ) , \theta _ { P } ( t ) )
QP(t)=(xP(t),yP(t),θP(t))表示物理 UGV 在物理全局坐标上的位置,
L
L
L (θ
P
P
P (
t
t
t ))是与
L
L
L (θ
V
V
V (
t
t
t ))具有相同形式的矩阵
L
(
θ
V
(
t
)
)
,
V
P
(
t
)
=
[
v
P
(
t
)
,
ω
P
(
t
)
]
T
L ( \theta _ { V } ( t ) ) , V _ { P } ( t ) = \left[ v _ { P } ( t ) , \omega _ { P } ( t ) \right] ^ { T }
L(θV(t)),VP(t)=[vP(t),ωP(t)]T是线速度和角速度矢量。物理 UGV 的动态模型显示为
V
˙
P
(
t
)
=
B
Γ
P
(
t
)
+
Ξ
P
(
t
)
\dot { V } _ { P } ( t ) = B \Gamma _ { P } ( t ) + \varXi _ { P } ( t )
V˙P(t)=BΓP(t)+ΞP(t)其中,
Γ
P
Γ_P
ΓP (
t
t
t )表示输入扭矩向量,
Ξ
P
Ξ_P
ΞP (
t
t
t )表示物理 UGV 的外部干扰向量。
在本文中,虚拟 UGV 与物理 UGV 在几何、运动学和物理性质上是相同的。也就是说,虚拟 UGV 遭受的外部干扰的来源也与物理 UGV 的相同。
在动力学模型(
5
5
5 )中模拟了摩擦、空气阻力和侧向偏转力。请注意, UGV 的线速度和角速度是连续变化和有界的。因此,
Ξ
V
(
t
)
Ξ _V ( t )
ΞV(t) 和
Ξ
P
(
t
)
Ξ _P ( t )
ΞP(t)在动态模型(
5
5
5 )和(
9
9
9 )中是有界且连续可微的。根据方程式(
6
6
6 )-(
7
7
7 ),表明
∣
f
˙
V
r
(
t
)
∣
≤
Ω
V
,
∣
f
˙
V
f
(
t
)
∣
≤
Ω
P
| \dot { f } _ { V r } ( t ) | \leq \Omega _ { V } , | \dot { f } _ { V f } ( t ) | \leq \Omega _ { P }
∣f˙Vr(t)∣≤ΩV,∣f˙Vf(t)∣≤ΩP其中,
Ω
V
\Omega_V
ΩV 和
Ω
P
\Omega_P
ΩP 是两个常数。
3.2 防撞研究
如图所示,提出了一种基于 DT 系统的交叉口实体 UGV 避碰规划与控制策略。
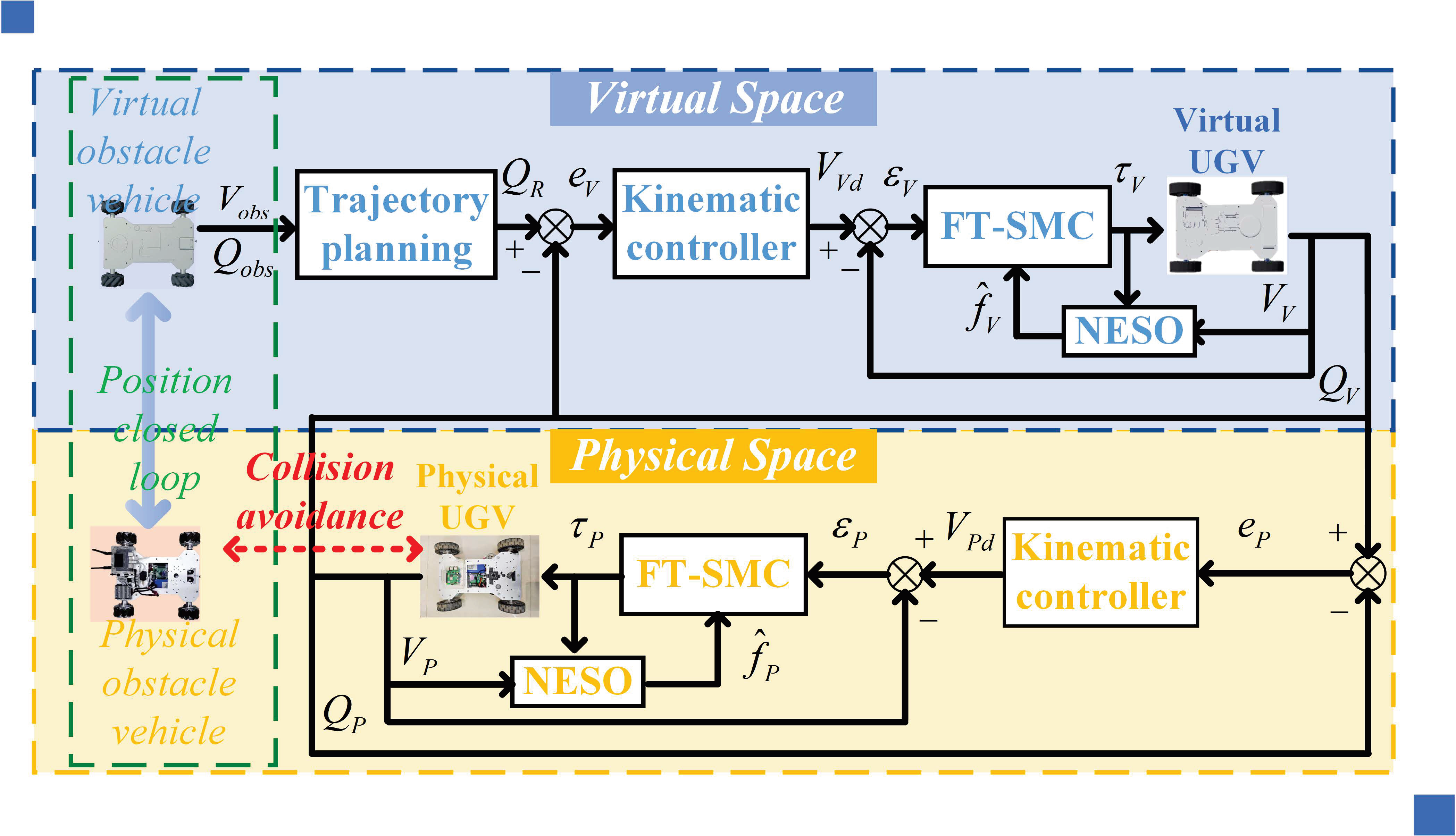
在上图中,虚拟障碍车与物理障碍车辆的运动保持位置同步。基于虚拟障碍物车辆的位置
Q
o
b
s
=
[
x
o
b
s
,
y
o
b
s
]
T
Q _ { o b s } = \left[ x _ { o b s } , y _ { o b s } \right] ^ { T }
Qobs=[xobs,yobs]T速度
V
o
b
s
=
[
v
x
o
b
s
,
v
y
o
b
s
]
T
V _ { o b s } = \left[ v _ { x o b s } , v _ { y o b s } \right] ^ { T }
Vobs=[vxobs,vyobs]T和加速度
A
o
b
s
=
[
a
x
o
b
s
,
a
y
o
b
s
]
T
A _ { o b s } = \left[ a _ { x o b s } , a _ { y o b s } \right] ^ { T }
Aobs=[axobs,ayobs]T预先在虚拟空间中完成防撞轨迹规划。
设计运动学控制器、非线性 ESO ( NESO )和有限时间滑模控制器( FT - SMC ),实现了虚拟 UGV 和物理 UGV 的双向跟踪控制。将规划轨迹
Q
R
Q_R
QR 作为期望轨迹,虚拟 UGV 和物理 UGV 通过双向跟踪控制方法同步跟踪期望轨迹
Q
R
Q_R
QR 。
在本文中,运动学控制器,非线性 ESO 和有限时间滑模控制器设计的虚拟 UGV 与物理 UGV 保持同步关系。为了简单起见,以虚拟 UGV 为例分析运动控制器、非线性 ESO 和有限时间滑模控制器的双向跟踪控制方法的稳定性。
四、防撞规划与控制策略
4.1 轨迹规划
下图是一个交叉路口的场景:
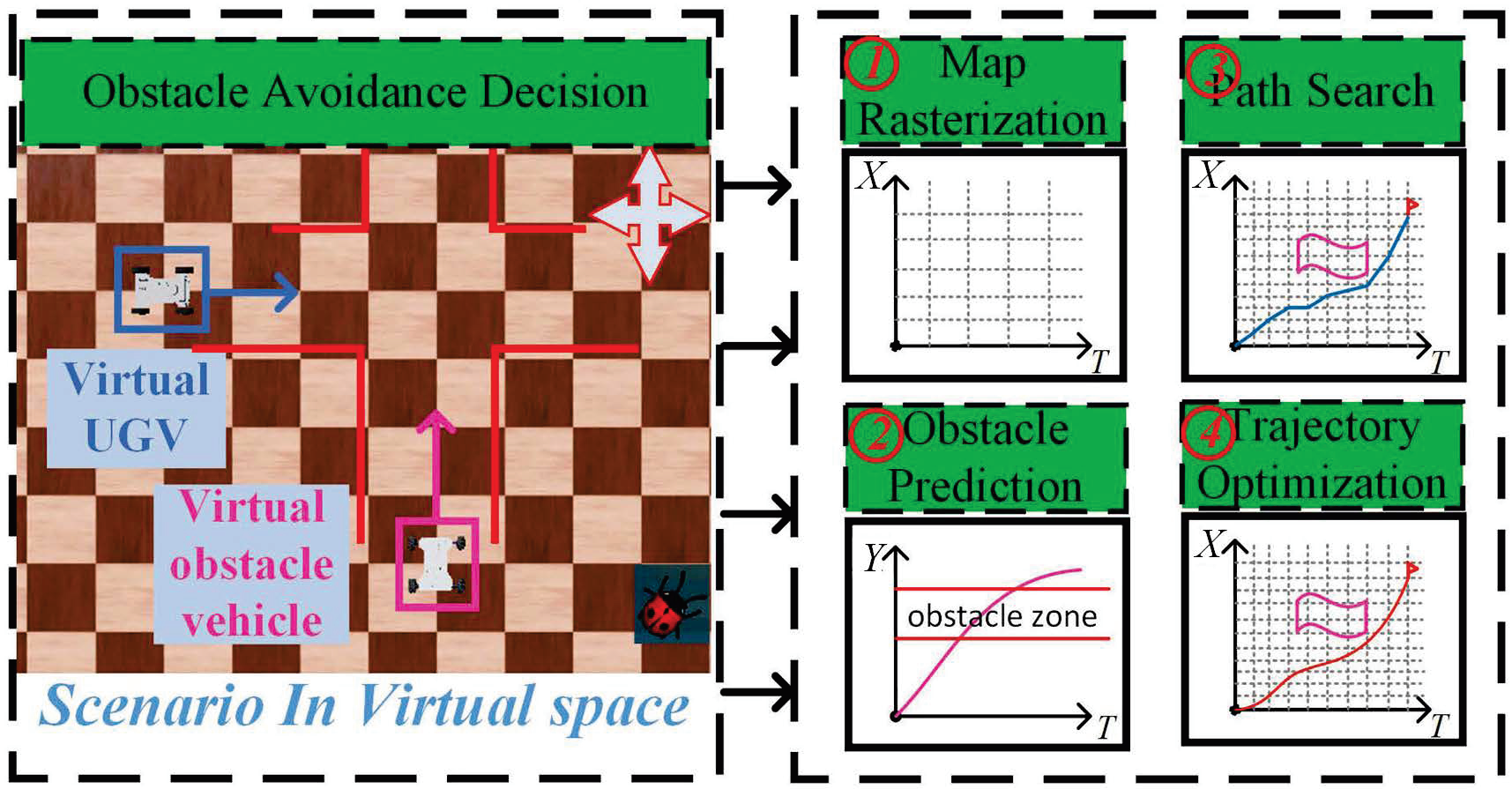
其中实体 UGV 避免与横向移动的障碍物车辆碰撞。在物理空间中很难获得障碍物车辆的位置和速度。考虑到虚拟空间中环境和障碍物车辆的完整和易于访问的信息,为虚拟 UGV 和物理 UGV 设计了轨迹规划方法,如上图所示,使用
Y
Y
Y -
T
T
T 图来预测障碍车辆,对 UGV 的
X
X
X -
T
T
T 图进行栅格化以驱动轨迹规划。
本文的轨迹规划方法由以下四个步骤驱动。
(1) 地图栅格化
通过 ROS 的服务通信,应用服务获取 Webots 中虚拟 UGV 和虚拟障碍车的环境维度、静态和动态属性等虚拟空间信息,构建栅格地图。在栅格地图中,纵轴表示虚拟 UGV 的前进方向,横轴表示时间。
(2) 障碍物预测
虚拟障碍物车辆的速度
V
o
b
s
(
t
)
V_{obs} ( t )
Vobs(t)和加速度
A
o
b
s
(
t
)
A_{obs} ( t )
Aobs(t)被示出为:
{
v
x
o
b
s
(
t
)
=
v
o
b
s
(
t
)
cos
(
θ
o
b
s
(
t
)
)
v
y
o
b
s
(
t
)
=
v
o
b
s
(
t
)
sin
(
θ
o
b
s
(
t
)
)
a
x
o
b
s
(
t
)
=
a
o
b
s
(
t
)
cos
(
θ
o
b
s
(
t
)
)
a
y
o
b
s
(
t
)
=
a
o
b
s
(
t
)
sin
(
θ
o
b
s
(
t
)
)
\left\{\begin{array}{l}v_{xobs}(t)=v_{obs}(t)\cos(\theta_{obs}(t))\\v_{yobs}(t)=v_{obs}(t)\sin(\theta_{obs}(t))\\a_{xobs}(t)=a_{obs}(t)\cos(\theta_{obs}(t))\\a_{yobs}(t)=a_{obs}(t)\sin(\theta_{obs}(t))\end{array}\right.
⎩
⎨
⎧vxobs(t)=vobs(t)cos(θobs(t))vyobs(t)=vobs(t)sin(θobs(t))axobs(t)=aobs(t)cos(θobs(t))ayobs(t)=aobs(t)sin(θobs(t))其中
Q
o
b
s
(
t
)
=
Q
o
b
s
(
0
)
+
V
o
b
s
(
t
)
t
+
1
2
A
o
b
s
(
t
)
t
2
Q _ { o b s } ( t ) = Q _ { o b s } ( 0 ) + V _ { o b s } ( t ) t + \frac { 1 } { 2 } A _ { o b s } ( t ) t ^ { 2 }
Qobs(t)=Qobs(0)+Vobs(t)t+21Aobs(t)t2因此,栅格地图中的虚拟 UGV 的障碍物区域可用于下一步骤。
(3) 路径搜索
使用 A-star 算法在栅格地图中搜索最优路径,完成虚拟无人车的避碰。在本文中,移动成本计算的欧几里德距离的方法。因此,从点
(
x
1
,
y
1
)
(x _1 ,y_1 )
(x1,y1)到点
(
x
2
,
y
2
)
(x _2 ,y _2 )
(x2,y2)的成本估计函数被给出为
h
{
(
x
1
,
y
1
)
,
(
x
2
,
y
2
)
}
=
(
x
2
−
x
1
)
2
+
(
y
2
−
y
1
)
2
h \left\{ ( x _ { 1 } , y _ { 1 } ) , ( x _ { 2 } , y _ { 2 } ) \right\} = \sqrt { ( x _ { 2 } - x _ { 1 } ) ^ { 2 } + ( y _ { 2 } - y _ { 1 } ) ^ { 2 } }
h{(x1,y1),(x2,y2)}=(x2−x1)2+(y2−y1)2考虑基于成本估计函数(
11
11
11 )的路径质量,获得路径评估函数为
f
(
n
)
=
g
(
n
)
+
h
{
(
x
n
,
y
n
)
,
(
x
g
,
y
g
)
}
f ( n ) = g ( n ) + h \left\{ ( x _ { n } , y _ { n } ) , ( x _ { g } , y _ { g } ) \right\}
f(n)=g(n)+h{(xn,yn),(xg,yg)}其中
g
(
n
)
g ( n )
g(n)表示从节点
0
0
0 到节点
n
n
n 的实际成本,
(
x
n
,
y
n
)
( x_n , y_n )
(xn,yn)表示节点
n
n
n 的坐标,
(
x
g
,
y
g
)
( x_g , y_g )
(xg,yg) 表示目标节点的坐标。
(4) 轨迹优化
在
A
A
A - star 算法搜索到的路径点的基础上,采用二次规划方法,得到了一条更连续、更可行的轨迹。综合考虑路径长度、能耗和安全成本,得到目标函数为
min
F
(
N
)
=
∑
i
=
1
N
{
w
1
P
C
i
+
w
2
E
C
i
+
w
3
S
C
i
}
\min { F ( N ) } = \sum _ { i = 1 } ^ { N } \left\{ w _ { 1 } P C _ { i } + w _ { 2 } E C _ { i } + w _ { 3 } S C _ { i } \right\}
minF(N)=i=1∑N{w1PCi+w2ECi+w3SCi}其中
P
C
i
=
∥
Q
(
i
+
1
)
−
Q
(
i
)
∥
2
,
E
C
i
=
Q
¨
2
(
i
)
,
S
C
i
=
α
v
v
r
e
l
(
i
)
+
α
a
a
o
b
s
(
i
)
d
o
b
s
(
i
)
+
ε
\begin{aligned}&PC_{i}=\left\|Q(i+1)-Q(i)\right\|^2, EC_i=\ddot{Q}^2(i),\\&SC_{i}=\frac{\alpha_vv_{rel}(i)+\alpha_aa_{obs}(i)}{d_{obs}(i)+\varepsilon}\end{aligned}
PCi=∥Q(i+1)−Q(i)∥2,ECi=Q¨2(i),SCi=dobs(i)+εαvvrel(i)+αaaobs(i) 其中, PCi 、 ECi 和 SCi 分别是路径长度评估、能量消耗评估和安全成本评估, dobs (
i
i
i )是到障碍物车辆的距离, vrel (
i
i
i )是 UGV 与障碍物之间的相对速度, aobs (
i
i
i )是障碍物车辆的加速度,α
v
v
v 和α
a
a
a 是比例因子来适当地加权相对速度和加速度,ε是一个小常数以避免被零除。对于一些具有随机或不可预测运动的障碍物,障碍物周围的指定缓冲区被视为潜在障碍物区域,其可以被计入安全成本评估
S
C
i
SC_i
SCi。考虑到碰撞约束和动态约束,规划轨迹
Q
Q
Q (
i
i
i )的约束条件被给出为
Q
(
i
)
∉
Q
o
b
s
,
Q
˙
(
i
)
∈
[
v
min
,
v
max
]
Q
¨
(
i
)
∈
[
a
min
,
a
max
]
\begin{aligned}&Q(i)\notin Q_{obs}, \dot{Q}(i)\in[v_{\min},v_{\max}]\\&\ddot{Q}(i)\in[a_{\min},a_{\max}]\end{aligned}
Q(i)∈/Qobs,Q˙(i)∈[vmin,vmax]Q¨(i)∈[amin,amax] 其中 Qobs 是障碍物区, vmin 和 vmax 分别是虚拟 UGV 的最小和最大速度, amin 和 amax 分别是虚拟 UGV 的最小和最大加速度。
4.2 运动学控制器
运动控制器的设计提供所需的速度,以确保收敛的位置误差。以描绘期望轨迹 QR (
t
t
t )的参考 UGV 为例,虚拟 UGV 和参考 UGV 之间的位置误差图如图
6
6
6 所示。
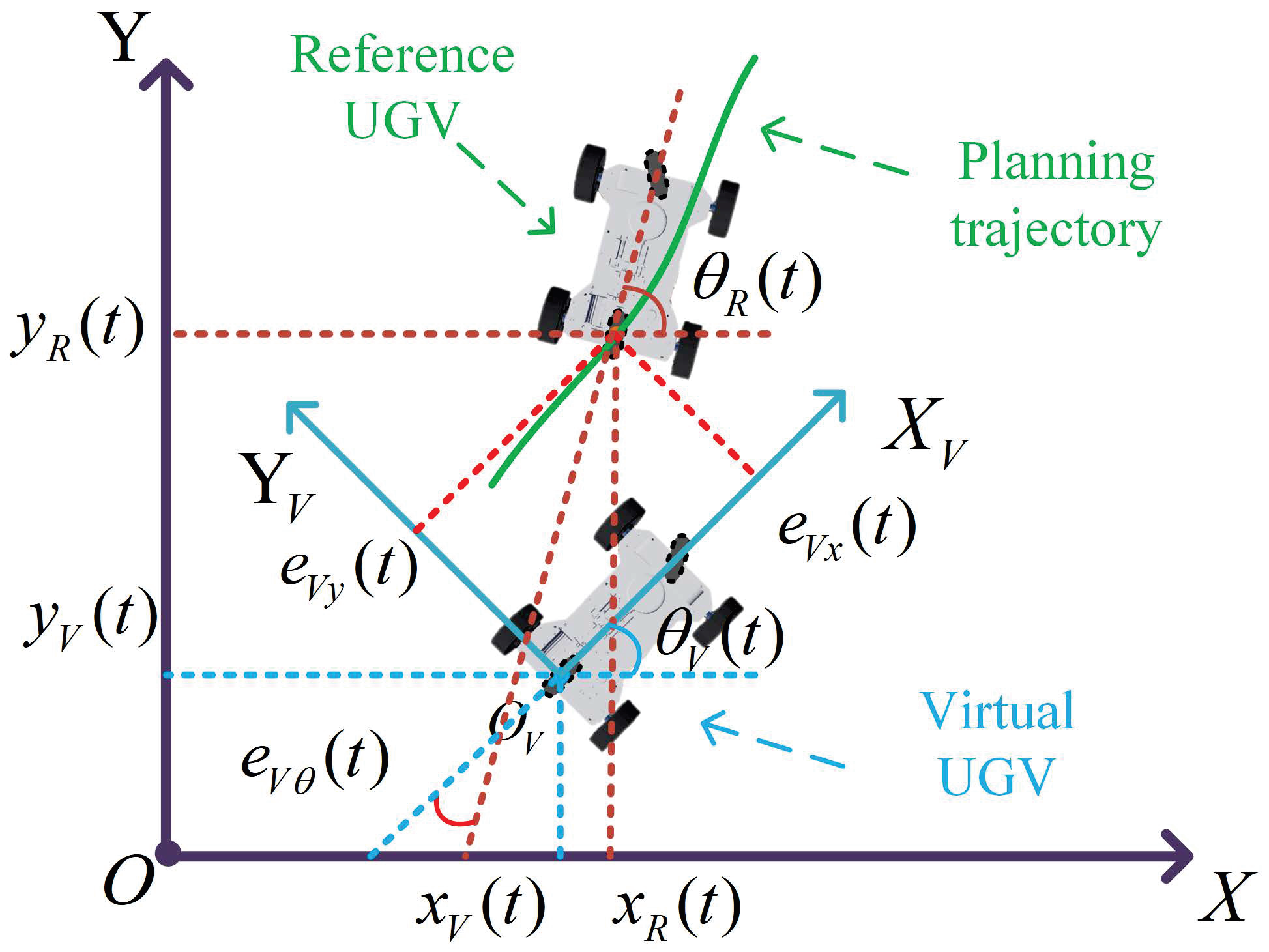
在上图中
Q
R
(
t
)
=
[
x
R
(
t
)
,
y
R
(
t
)
,
θ
R
(
t
)
]
T
Q _ { R } ( t ) = \left[ x _ { R } ( t ) , y _ { R } ( t ) , \theta _ { R } ( t ) \right] ^ { T }
QR(t)=[xR(t),yR(t),θR(t)]T表示参考 UGV 和虚拟 UGV 在局部坐标{ XV , OV , YV }上的位置误差。一个是
e
V
(
t
)
=
E
V
(
t
)
(
Q
R
(
t
)
−
Q
V
(
t
)
)
(12)
e _ { V } ( t ) = E _ { V } ( t ) ( Q _ { R } ( t ) - Q _ { V } ( t ) )\tag{12}
eV(t)=EV(t)(QR(t)−QV(t))(12)其中
E
V
(
t
)
=
[
cos
(
θ
V
(
t
)
)
sin
(
θ
V
(
t
)
)
0
−
sin
(
θ
V
(
t
)
)
cos
(
θ
V
(
t
)
)
0
0
0
1
]
E_V(t)=\begin{bmatrix}\cos(\theta_V(t))&\sin(\theta_V(t))&0\\-\sin(\theta_V(t))&\cos(\theta_V(t))&0\\0&0&1\end{bmatrix}
EV(t)=
cos(θV(t))−sin(θV(t))0sin(θV(t))cos(θV(t))0001
根据等式(
1
1
1 )和(
12
12
12 ),位置误差系统被获得为:
{
e
˙
V
x
(
t
)
=
ω
V
(
t
)
e
V
y
(
t
)
−
v
V
(
t
)
+
v
R
(
t
)
cos
(
e
V
θ
(
t
)
)
e
˙
V
y
(
t
)
=
v
R
(
t
)
sin
(
e
V
θ
(
t
)
)
−
ω
V
(
t
)
e
V
x
(
t
)
e
˙
V
θ
(
t
)
=
ω
R
(
t
)
−
ω
V
(
t
)
(13)
\left.\left\{\begin{array}{ll}\dot{e}_{Vx}(t)=\omega_V(t)e_{Vy}(t)-v_V(t)+v_R(t)\cos(e_{V\theta}(t))\\\dot{e}_{Vy}(t)=v_R(t)\sin(e_{V\theta}(t))-\omega_V(t)e_{Vx}(t)\\\dot{e}_{V\theta}(t)=\omega_R(t)-\omega_V(t)\end{array}\right.\right.\tag{13}
⎩
⎨
⎧e˙Vx(t)=ωV(t)eVy(t)−vV(t)+vR(t)cos(eVθ(t))e˙Vy(t)=vR(t)sin(eVθ(t))−ωV(t)eVx(t)e˙Vθ(t)=ωR(t)−ωV(t)(13)其中
v
R
(
t
)
v_R ( t )
vR(t) 和
ω
R
(
t
)
ω _R (t )
ωR(t)分别是参考 UGV 的线速度和角速度。基于位置误差系统(
13
13
13 ),如下设计运动控制器:
{
v
V
d
(
t
)
=
v
R
(
t
)
cos
(
e
V
θ
(
t
)
)
+
k
1
e
V
x
(
t
)
ω
V
d
(
t
)
=
ω
R
(
t
)
+
k
2
v
R
(
t
)
e
V
y
(
t
)
cos
(
e
V
θ
(
t
)
2
)
+
k
3
sin
(
e
V
θ
(
t
)
2
)
\left.\left\{\begin{array}{c}v_{Vd}(t)=v_R(t)\cos(e_{V\theta}(t))+k_1e_{Vx}(t)\\\omega_{Vd}(t)=\omega_R(t)+k_2v_R(t)e_{Vy}(t)\cos\left(\frac{e_{V\theta}(t)}{2}\right)\\+k_3\sin\left(\frac{e_{V\theta}(t)}{2}\right)\end{array}\right.\right.
⎩
⎨
⎧vVd(t)=vR(t)cos(eVθ(t))+k1eVx(t)ωVd(t)=ωR(t)+k2vR(t)eVy(t)cos(2eVθ(t))+k3sin(2eVθ(t))其中,
k
1
k _1
k1 、
k
2
k _2
k2 和
k
3
k _3
k3 是常数。
4.3 非线性扩展状态观测器(ESO)
在下文中,设计了一个非线性 ESO 来估计虚拟 UGV 的外部干扰。基于动态模型(
5
5
5 ),获得扩展状态系统,如下:
v
˙
V
X
(
t
)
=
b
X
τ
V
X
(
t
)
+
f
V
X
(
t
)
f
˙
V
X
(
t
)
=
ζ
V
X
(
t
)
\begin{matrix} \dot { v } _ { V _ { X } } ( t ) = b _ { X } \tau _ { V _ { X } } ( t ) + f _ { V _ { X } } ( t ) \\ \dot { f } _ { V _ { X } } ( t ) = \zeta _ { V _ { X } } ( t ) \end{matrix}
v˙VX(t)=bXτVX(t)+fVX(t)f˙VX(t)=ζVX(t) 设计了一种非线性 ESO 来估计虚拟 UGV 的外部干扰。
4.4 瞬时滑模控制器(FT-SMC)
设计了有限时间滑模控制器来跟踪来自运动控制器的期望速度。
4.5 本文设计特色
(1) A-star算法在UGV路径搜索中的应用
本文采用
A
A
A - star 算法在 UGV 的
X
X
X -
T
T
T 图上搜索避碰路径,获得参考轨迹。基于障碍物车辆的几何尺寸、位置、速度和加速度信息,计算
X
X
X -
T
T
T 图上的障碍物面积 Qobs (
t
t
t ) 可以被预测用于 UGV 的
X
X
X -
T
T
T 图上的路径搜索。
当障碍物面积 Qobs (
t
t
t )发生变化时,可以反复调用路径搜索算法寻找新的最优路径,因此,一种启发式的静态全局路径搜索方法是
A
A
A - star 算法,它既能找到最优路径,又能保证搜索时间。
A
A
A - star 算法作为一种简洁高效的启发式搜索算法,非常适合于本文提出的 DT 系统中的路径搜索。虽然其他算法如 D*Lite 和 Theta* 在许多环境中具有更好的性能,但在 DT 系统中,在先验信息的虚拟空间下,不需要更复杂的规划算法。
此外,本文重点介绍了 DT 技术和设计合适的控制器,使 UGV 有效地通过交叉口。因此,本文选择了简单而充分的
A
A
A - star 算法作为本文的路径搜索方法。
(2) 运动控制器参数与双向跟踪控制方法
用于无人驾驶地面车辆( UGV )的运动控制系统包括一个位置环控制器,它通过调整位置误差增益来控制车辆在
X
X
X 轴、
Y
Y
Y 轴和
θ
θ
θ 轴(转向角)上的运动。
此外,系统还包含一个非线性扩展状态观测器( ESO ),它用来估计车辆的速度和受到的干扰,以及一个有限时间滑模控制器( FSMC ),它确保车辆能够快速且准确地跟踪参考路径。
这些控制器的参数需要精心选择,以确保系统在各种情况下都能稳定运行,比如当车辆的参考速度或转向角发生变化时。非线性饱和函数的使用有助于减少控制过程中的抖动,提高控制的平滑性和效率。
(3) DT系统的可扩展性与实时性能
本文所述的 DT 系统的可扩展性是设计阶段的一个关键考虑因素。 DT 系统的四层结构具有固有的模块化特性,可以在不显著降低性能的情况下集成和管理额外的 UGV 和障碍物。
具体而言, DT 系统利用分布式处理和分散式控制算法来有效地管理每个虚拟和物理组件。此外, DT 系统的虚拟空间、数据处理和应用服务都建立在具有足够运算能力的计算机引擎之上,支撑了系统规模的扩展。
非线性 ESO 和有限时间滑模控制器的设计与双向跟踪控制方法的实时性能,以保持鲁棒控制性能,而不增加计算复杂度。非线性 ESO 不依赖于系统特定的模型来估计状态和干扰,从而在保持实时性能的同时减少计算开销。
有限时间滑动模式控制器的计算仅依赖于状态误差,从而确保有限时间收敛,而不需要多次迭代或高阶导数。在每一步采样中, DT 系统只需计算少量的数学公式来求解控制输入,保证了双向跟踪控制方法的计算效率和实时性。
五、实验结果
在这一部分中,给出了一些实验结果来证明避碰规划和控制策略的有效性和优越性的 UGV 基于 DT 系统。物理空间和虚拟空间都是在图
7
7
7 中的交叉点处彼此接近的两个 UGV 上以相同的场景设置的。
上图防撞轨迹是虚拟 UGV 和物理 UGV 的成功规划。
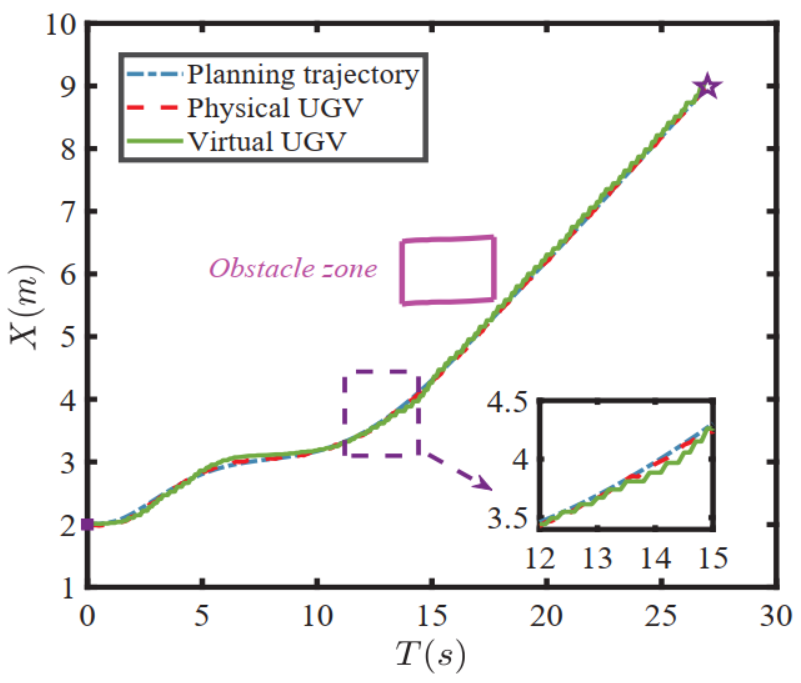
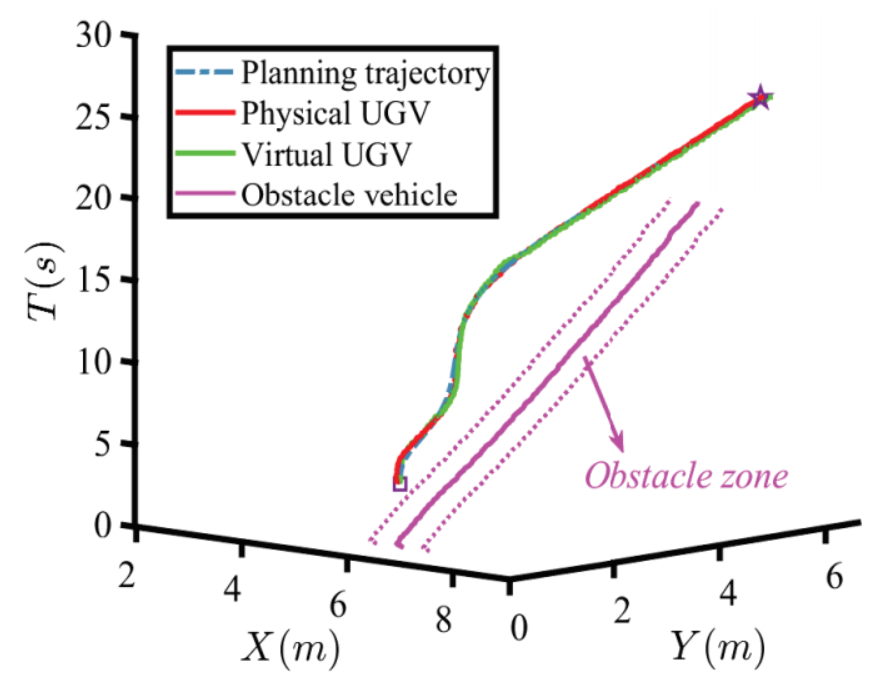
通过预测障碍车辆的障碍区域,研究规划了一条 UGV 的轨迹,要求其先减速后加速,以实现快速通过交叉口。实验中,通过虚拟 UGV 与物理 UGV 的同步轨迹验证了双向跟踪控制方法的有效性。位置误差在运动学控制器的调控下收敛到小范围,显示其对两种 UGV 均有效。
非线性扩展状态观测器( ESO )用于估计线性速度和外部扰动,结果表明其在反映真实速度及扰动方面表现良好。有限时间滑模控制器则有效调节输入转矩,尤其在 UGV 启动和加速期间。最后,通过一系列图示展示了 UGV 在复杂环境中避碰轨迹规划的成果,进一步验证了所提出的数字孪生系统的准确性。
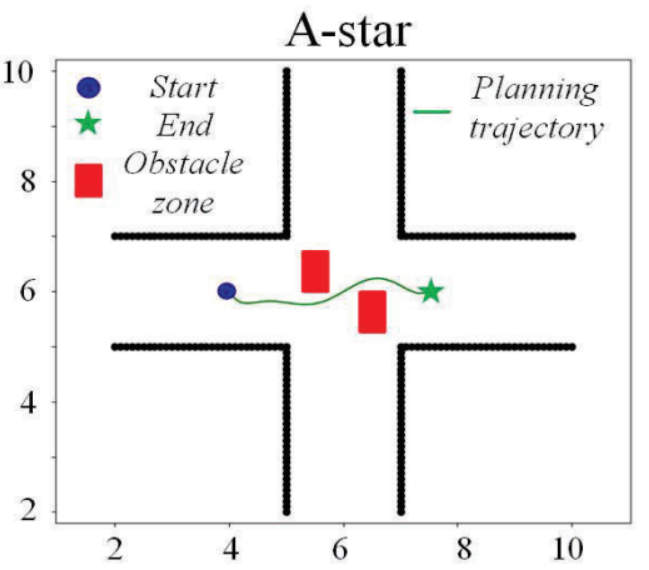
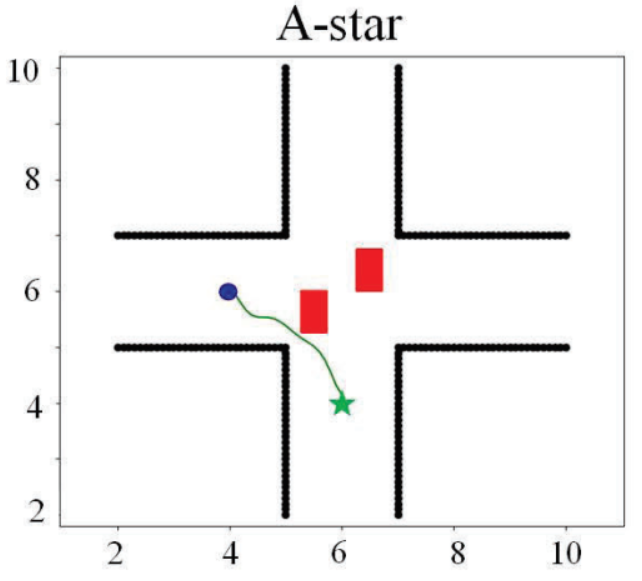
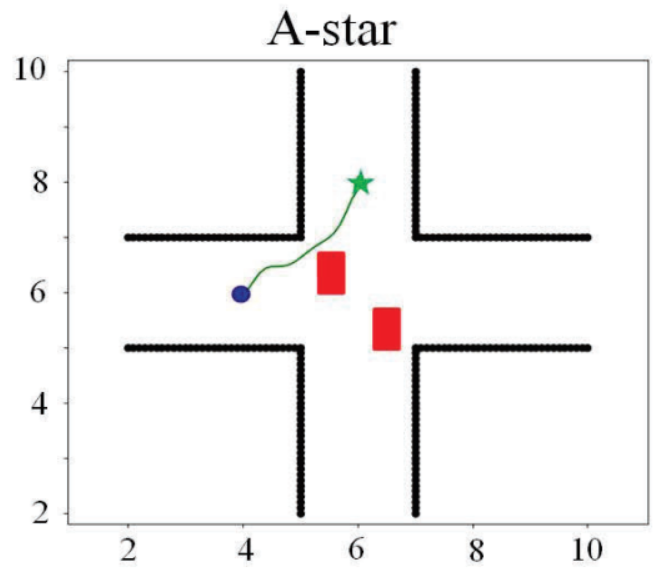
蓝色圆圈是起点,绿色五边形是终点,红色矩形是考虑障碍物面积、 UGV 宽度和安全距离的障碍物面积。对于非直线路径的复杂场景,首先利用本文提出的路径搜索和轨迹优化方法确定可行路径,然后对可行路径进行纵向规划,得到最优避碰轨迹。
UGV 的直行、右转和左转分别如图 (
a
a
a )、(
b
b
b )和(
c
c
c )所示。也就是说,本文的轨迹规划方法可以适用于其他情况,如在交叉口转弯。在下图中,进行了一些对比实验结果,以证明本文的避碰轨迹规划的优点和双向跟踪控制方法的优越性。
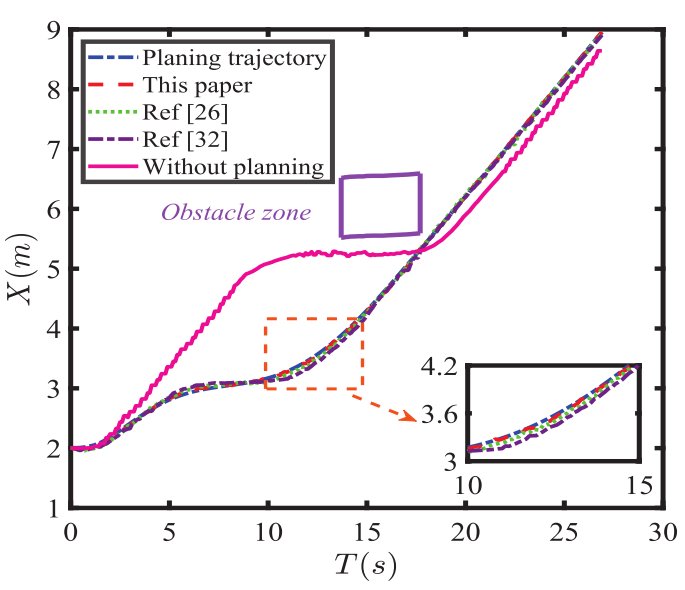
在没有预先规划的情况下,物理 UGV 在遇到障碍物车辆时会直接停车以避免碰撞。然而,通过本文提出的避碰轨迹规划方法,实体 UGV 能够在更高的速度下安全通过交叉口,有效提升了 UGV 在交叉口的运行效率。
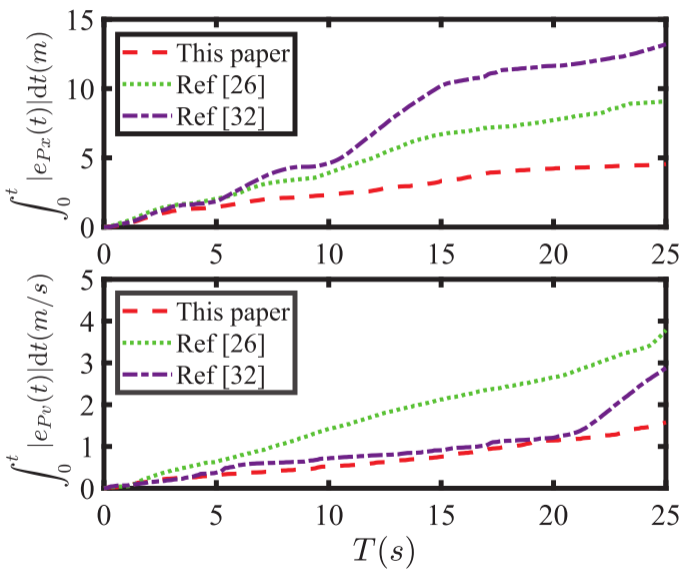
实验中,以规划轨迹作为期望轨迹,并分别采用了双向跟踪控制方法和其他两种控制方法进行对比。结果显示,双向跟踪控制方法在跟踪精度上优于其他两种方法,这一点通过均方根误差( RMSE )的数据也得到了证实。因此,实验结果验证了本文提出的避碰规划与控制策略的有效性和优越性。
六、结论
本文研究了 UGV 在交叉口与障碍物车辆的避碰问题。建立了一个四层的 DT 系统来解决 UGV 的避碰问题。基于 DT 系统提出了一种 UGV 高效避障规划与控制策略。通过地图栅格化、障碍物预测、路径搜索和轨迹优化,实现了避碰轨迹规划。
以规划轨迹为期望轨迹,设计了运动学控制器、非线性 ESO 和有限时间滑模控制器,实现了物理 UGV 和虚拟 UGV 的双向跟踪控制。对运动控制器、非线性 ESO 和有限时间滑模控制器进行了稳定性分析。
实验结果表明了该避碰规划与控制策略的有效性和优越性。
参考文献
后记:
🌟 感谢您耐心阅读这篇关于 基于数字孪生的无人驾驶车辆交叉口避碰规划与控制 的技术博客。 📚
🎯 如果您觉得这篇博客对您有所帮助,请不要吝啬您的点赞和评论 📢
🌟您的支持是我继续创作的动力。同时,别忘了收藏本篇博客,以便日后随时查阅。🚀
🚗 让我们一起期待更多的技术分享,共同探索移动机器人的无限可能!💡
🎭感谢您的支持与关注,让我们一起在知识的海洋中砥砺前行 🚀