📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨
📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】
📢:文章若有幸对你有帮助,可点赞 👍 收藏 ⭐不迷路🙉
📢:内容若有错误,敬请留言 📝指正!原创文,转载请注明出处
一、图像的掩膜操作
1.1API-filter2D
filter2D是掩膜操作的函数原型,其参数如下:
void filter2D(
InputArray src,
OutputArray dst,
int depth,
InputArray kernel,
Point anchor = Point(-1,-1),
double delta = 0,
int borderType = BORDER_DEFAULT );
参数的含义如下:
(1)InputArray类型的src ,输入图像。
(2)OutputArray类型的dst ,输出图像,图像的大小、通道数和输入图像相同。
(3)int类型的depth,目标图像的所需深度。
(4)InputArray类型的kernel,卷积核(或者更确切地说是相关核)是一种单通道浮点矩阵;如果要将不同的核应用于不同的通道,请使用split将图像分割成不同的颜色平面,并分别对其进行处理。。
(5)Point类型的anchor,表示锚点(即被平滑的那个点),注意他有默认值Point(-1,-1)。如果这个点坐标是负值的话,就表示取核的中心为锚点,所以默认值Point(-1,-1)表示这个锚点在核的中心。。
(6)double类型的delta,在将筛选的像素存储到dst中之前添加到这些像素的可选值。说的有点专业了其实就是给所选的像素值添加一个值delta。
(7)int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT。
1.2常见用法
Mat kernel = (Mat_<char>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);//此处注意小括号的位置。
filter2D(src, dst, src.depth(), kernel);//目标图像dst的深度跟src的一样。
二、全部代码
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main() {
Mat src, dst;
src = imread("D:/images/lena.png");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
Mat kernel =( Mat_<char>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);
filter2D(src, dst, src.depth(), kernel);
imshow("input image", src);
imshow("contrast image", dst);
waitKey(0);
return 0;
}
}
三、效果展示
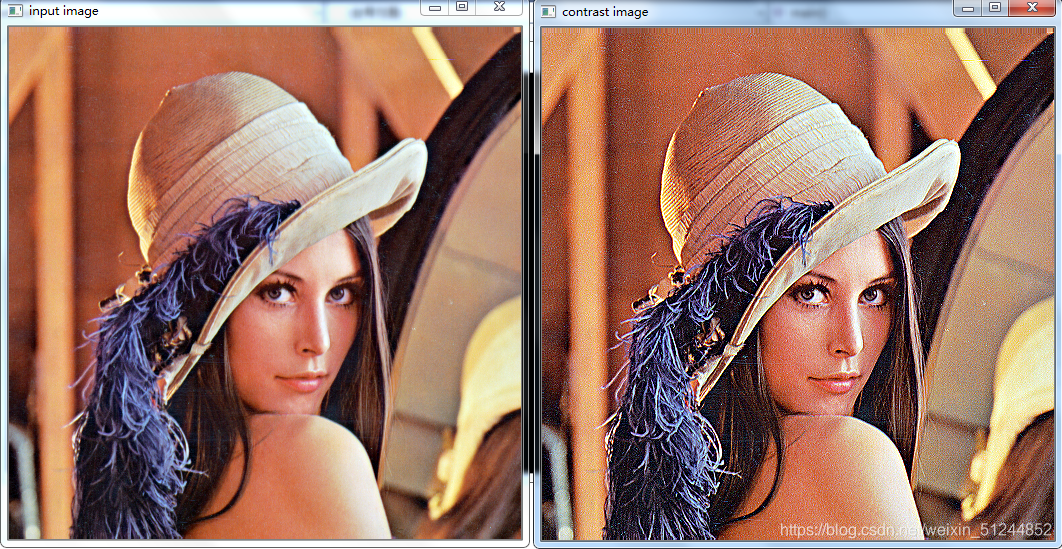
四、结论
目的:掩膜操作能增强图像的对比度