移植教程
FreeRTOS简介
FreeRTOS 介绍
FreeRTOS 是市场领先的面向微控制器和小型微处理器的实时操作系统 (RTOS),与世界领先的芯片公司合作开发,现在每 170 秒下载一次。FreeRTOS 通过 MIT 开源许可免费分发,包括一个内核和一组不断丰富的 IoT 库,适用于所有行业领域。FreeRTOS 的构建突出可靠性和易用性。
省却这些繁琐的苦涩难懂的概念,我们来看个简单的:比如你现在用的裸机编程,那么你会用while(1)来监测,这样会导致一个现象:你在while(1)闪烁一颗灯后,在while(1)中又想实现手动控制舵机,那么加入在点亮一颗灯的函数后有很多代码才轮到控制舵机的函数,当你点击舵机旋转按钮,有肯能就会导致舵机按钮按过后,好久才会有反应。这就是弊端,不呢能够及时的响应。而如果使用FreeRTOS,则可完成实时的操作,把这几个操作看成一个一个任务,人物之间互不打扰的,这样就实现了实时的效果。
FreeRTOS优点
- 可移植:对于不同的开发板,均支持移植,提高了通用性。
- 开源 :开源能够节省很多成本,因为开源免费。
- 轻量级
- 可定制
FreeRTOS移植
FreeRTOS 下载
点击FreeRTOS官网下载连接下载FreeRTOS
下载完成后解压至就合适的位置,

FreeRTOS目录结构
但注意,只有上面的圈中的第一个才有有用,但也不要把删除其他的。

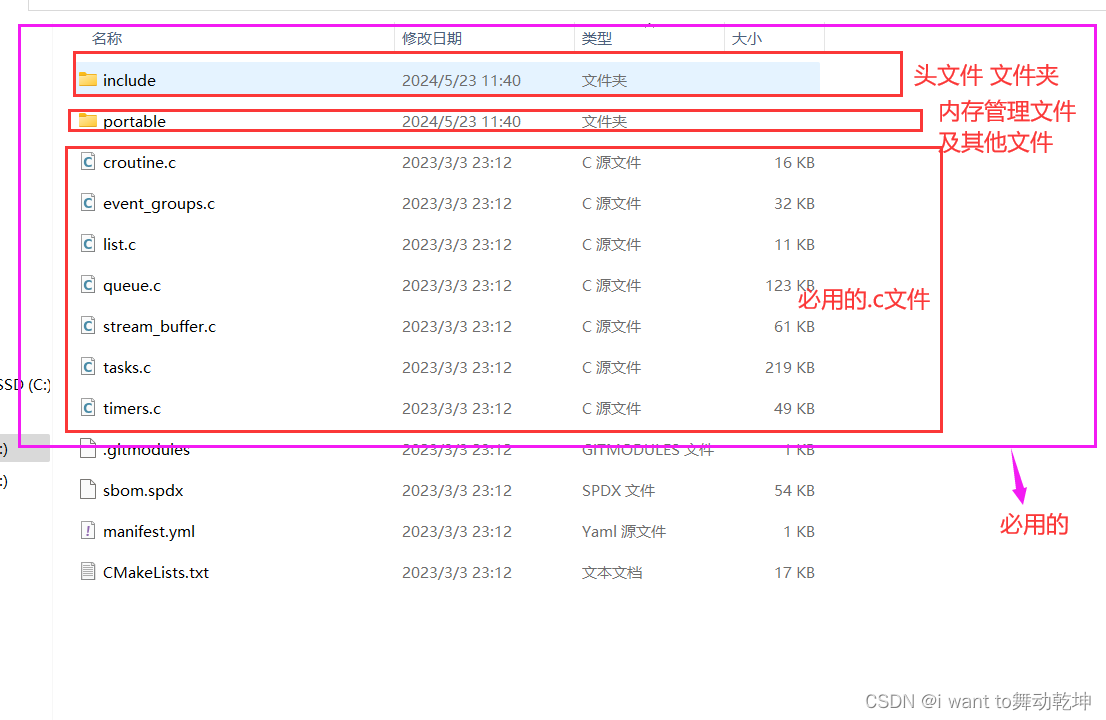
打开圈中的FreeRTOS的文件目录
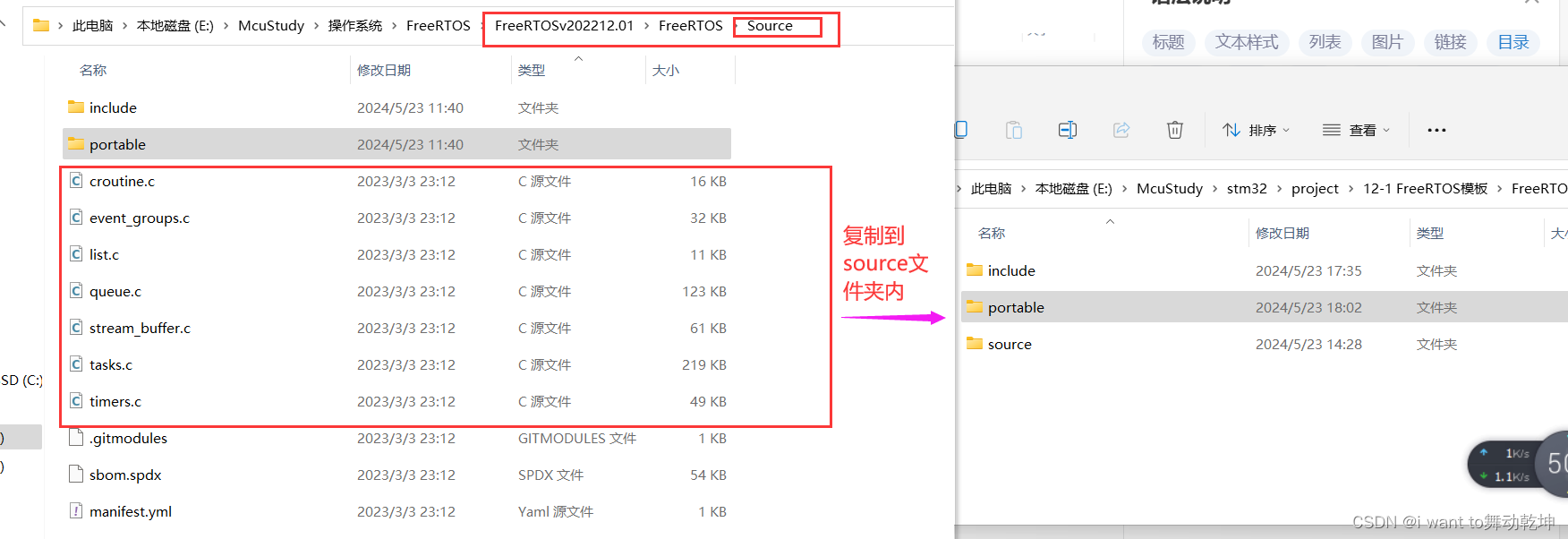
打开存放内核的Source,查看有哪些文件即文件夹:
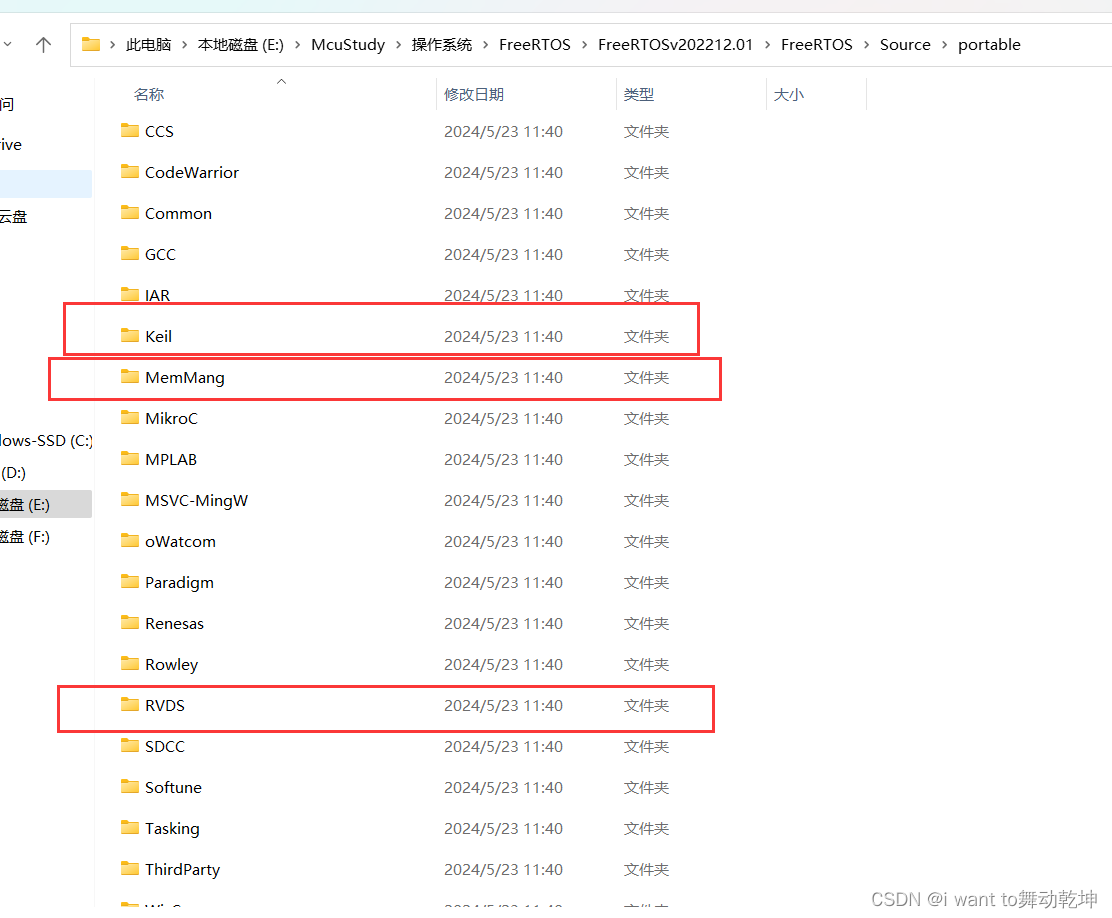
在portable文件夹内有如下文件夹,选中我们所需的(圈中的即为我们所需的)

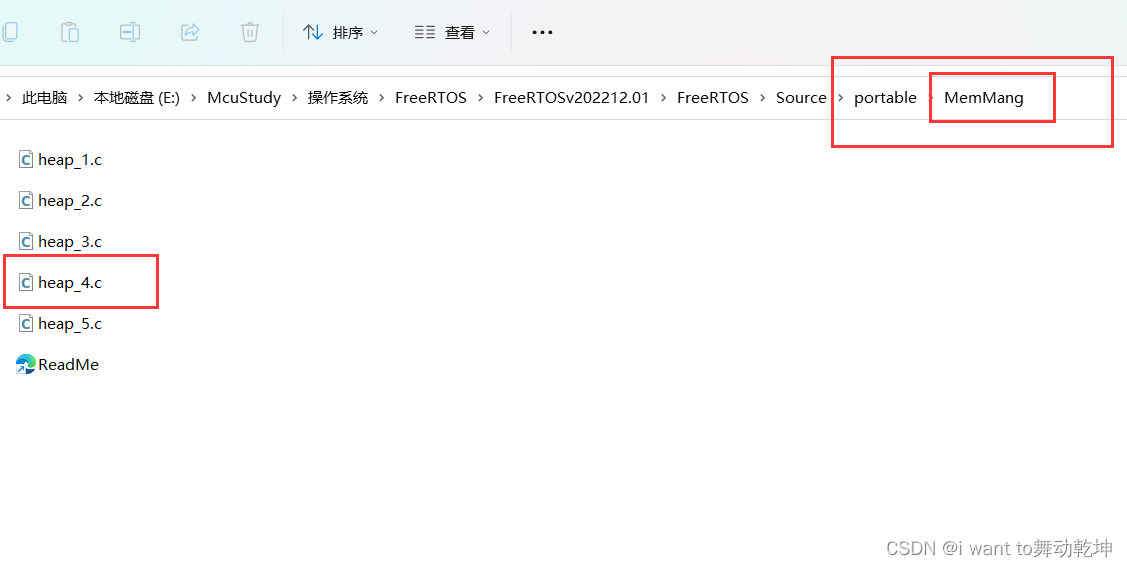
在MenMang文件夹内有如下文件,我们要用到内存管理算法4:
在RVDS文件夹选择要使用的开发板系列:
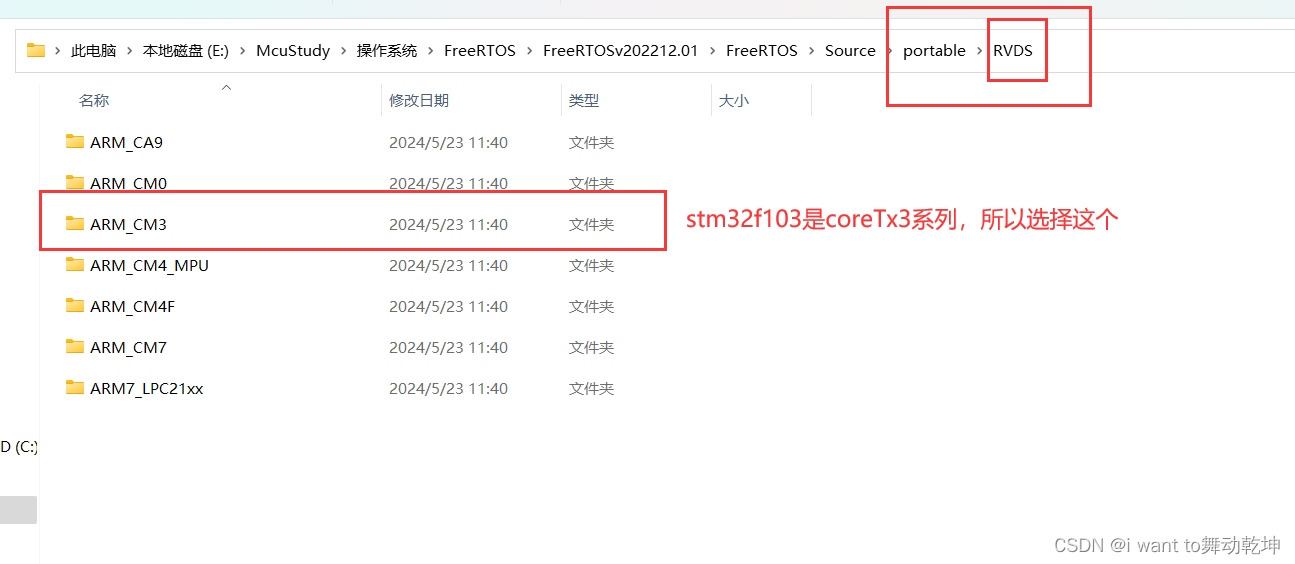
在ARM_CM3文件夹内有如下文件:

移植开始
在之前STM32的模板中新建:没有模板的,可参考我的前篇文章:【STM32标准库开发 工程模板建立最强最详细总结,详细到炸裂,一顿狂输出,看完立刻起飞】 建立模板:我这里提供一个建立好的模板:
工程模板下载
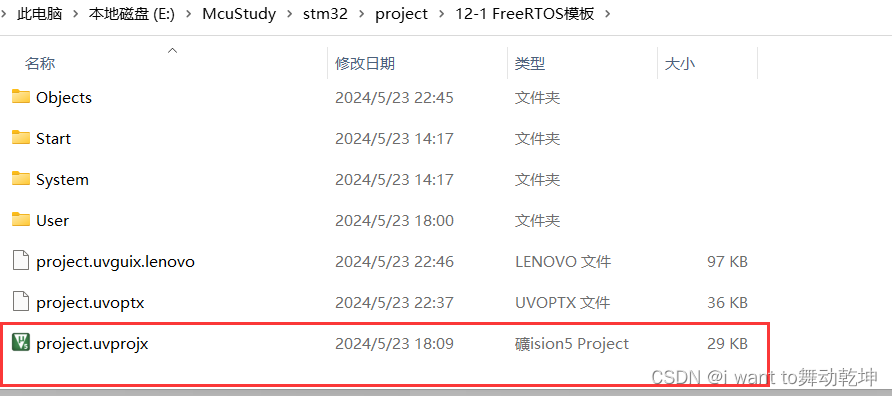
工程模板下载完成后目录结构如下图:并将该文件夹改名为FreeRTOS工程模板
原始:
改名后:
我们在这个模板中新建文件夹FreeRTOS

在FreeRTOS文件夹内建立三个文件夹存放上述的头文件夹和内存管理文件夹以及.c文件:
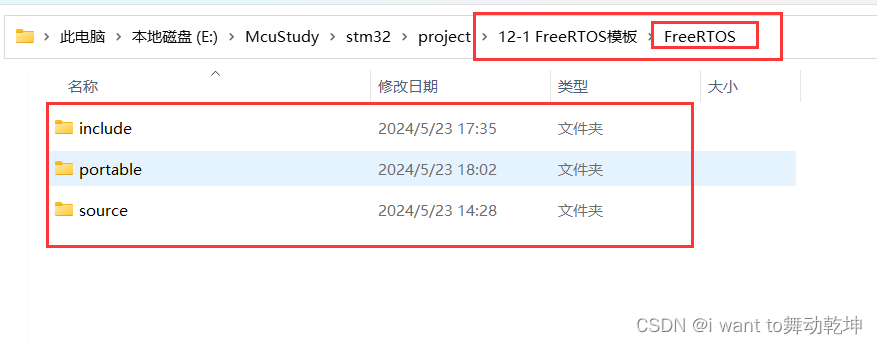
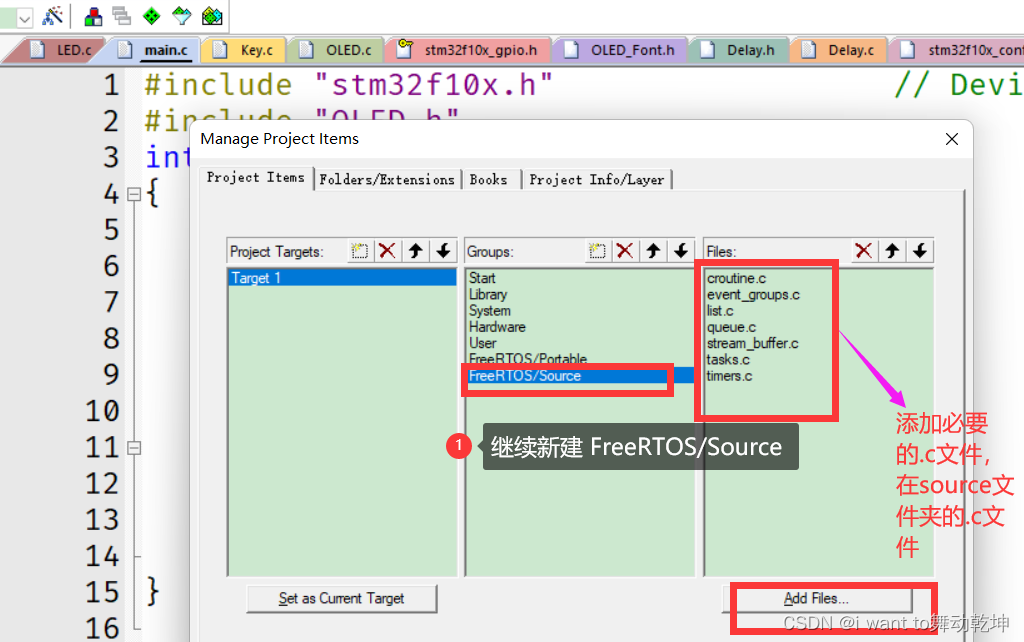
source文件夹存放.c文件
完成后

portable文件夹存放内存管理的文件夹
d.png)
include文件夹添加头文件

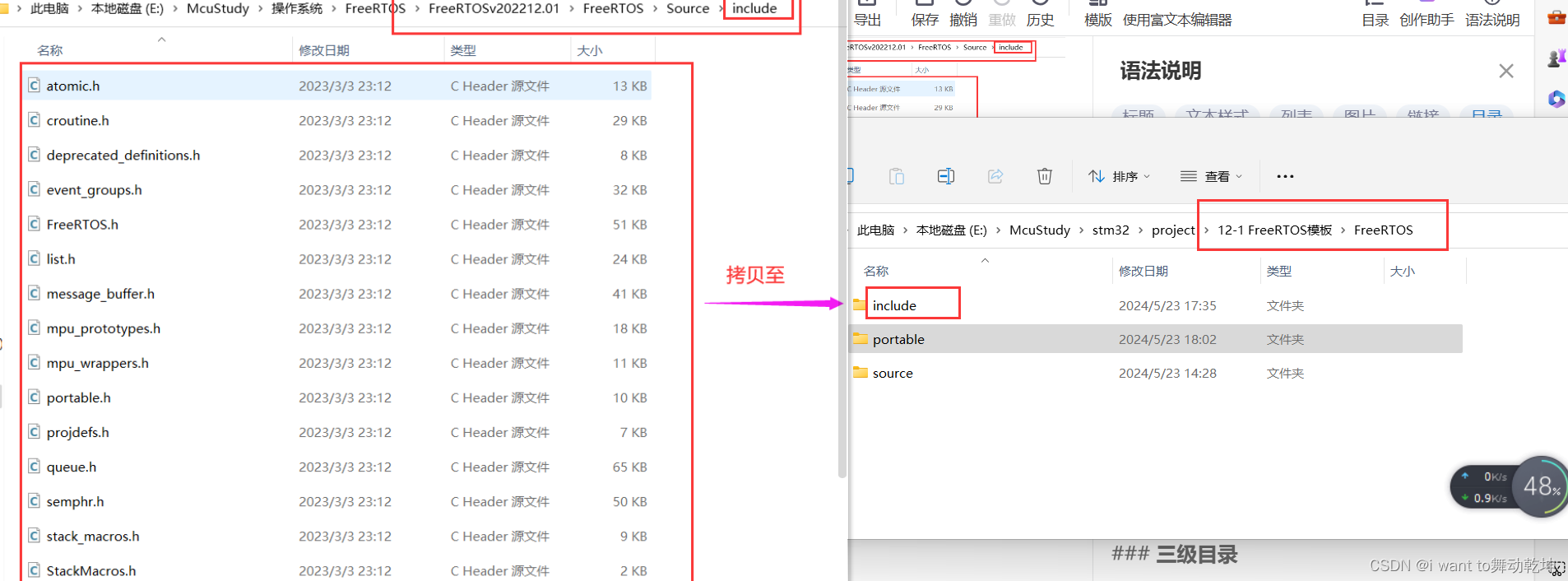
找到配置文件FreeRTOSConfig.h:
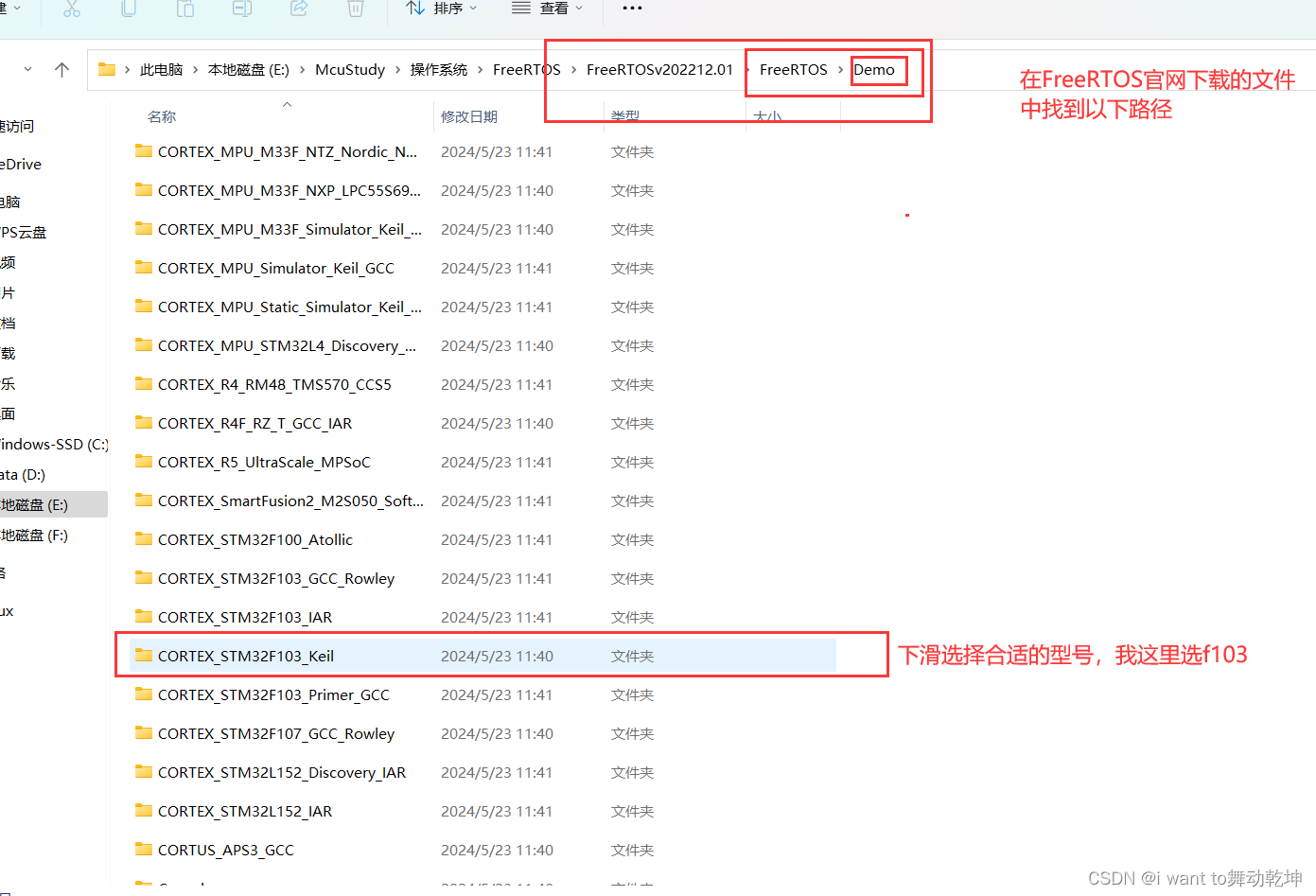
1.找到目录
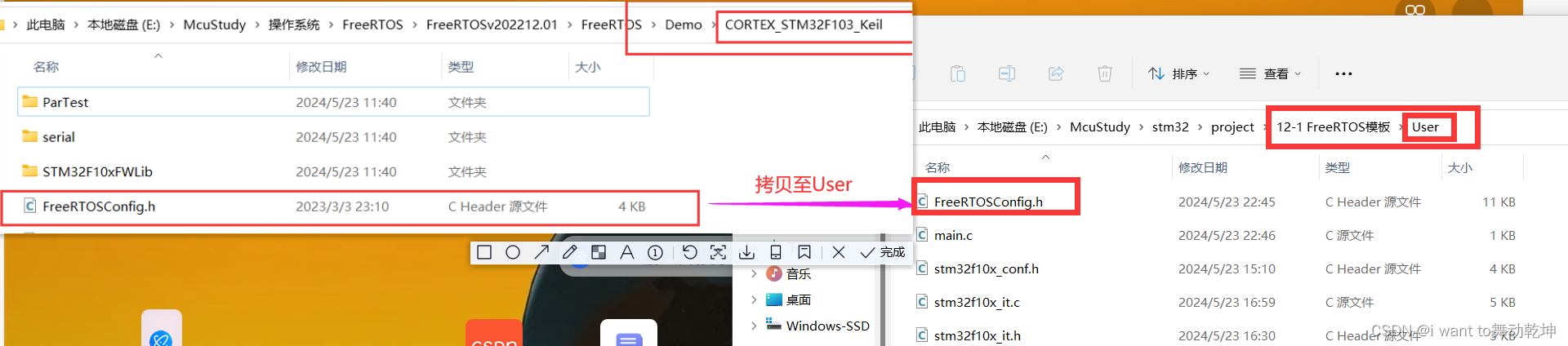
2.打开CORTEX_STM32F103_Keil 文件夹可查看到该FreeRTOSConfig.h复制该文件至User
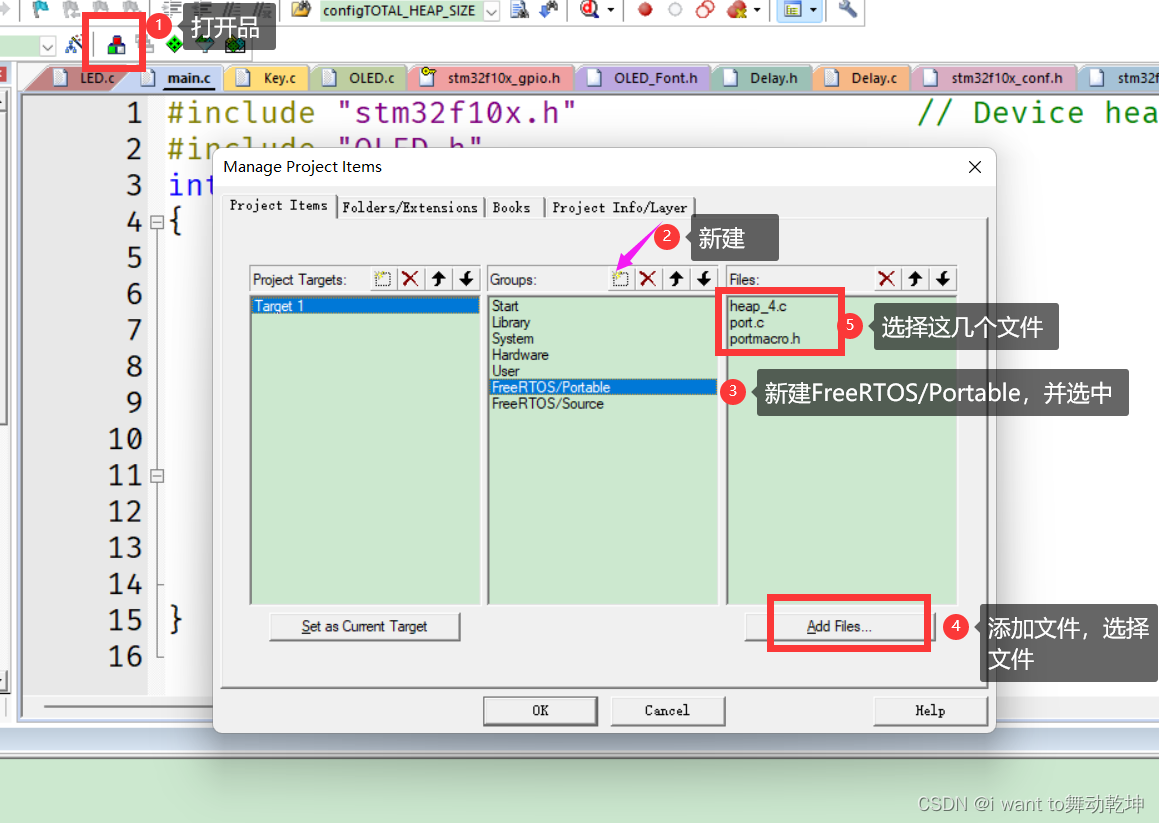
Keil5打开工程
点击“品”添加必要文件
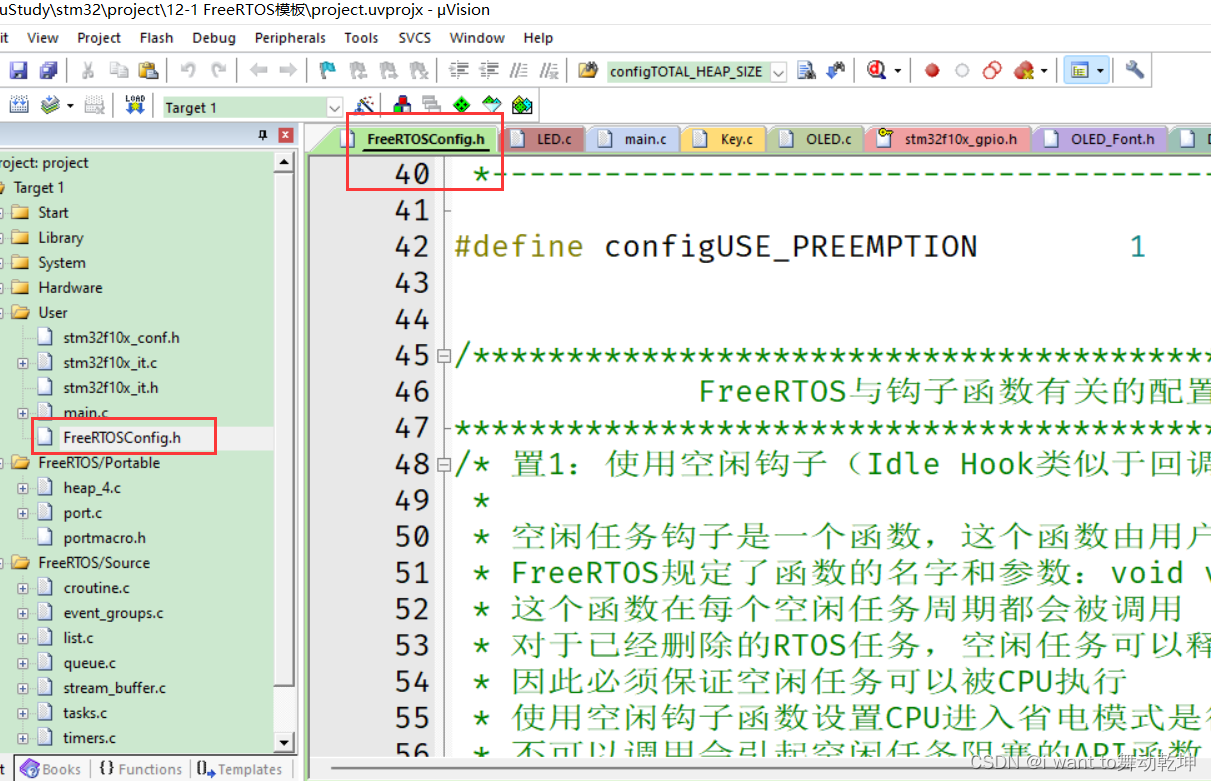
添加FreeRTOSConfig.h:
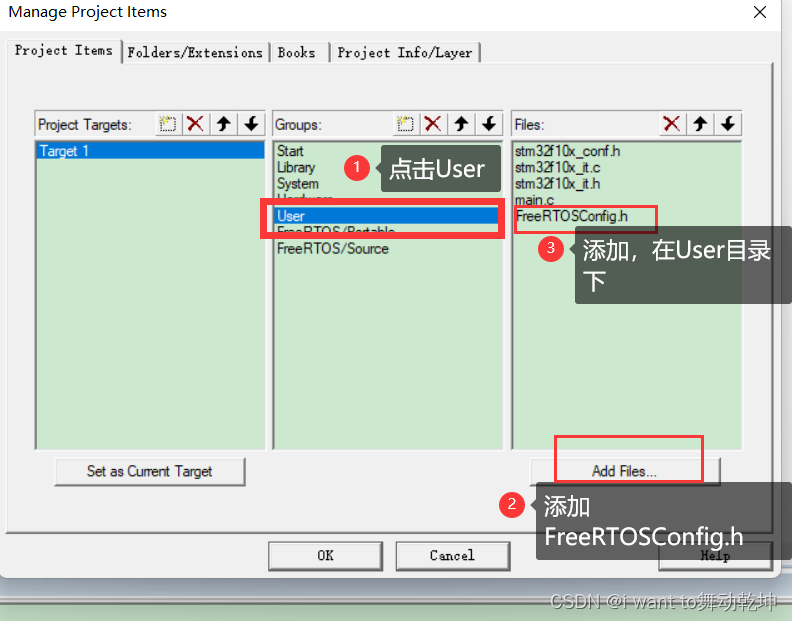
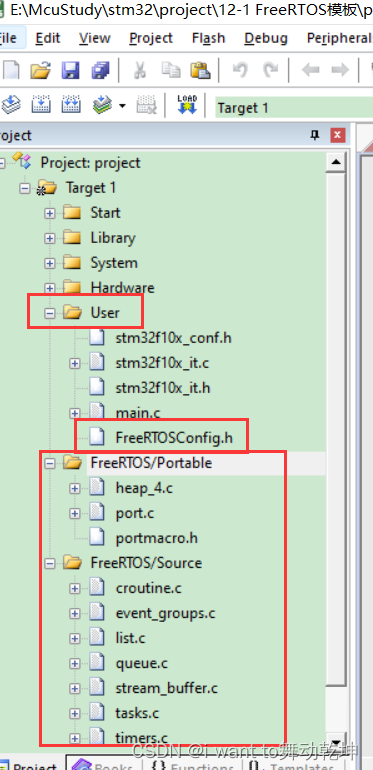
完成后:
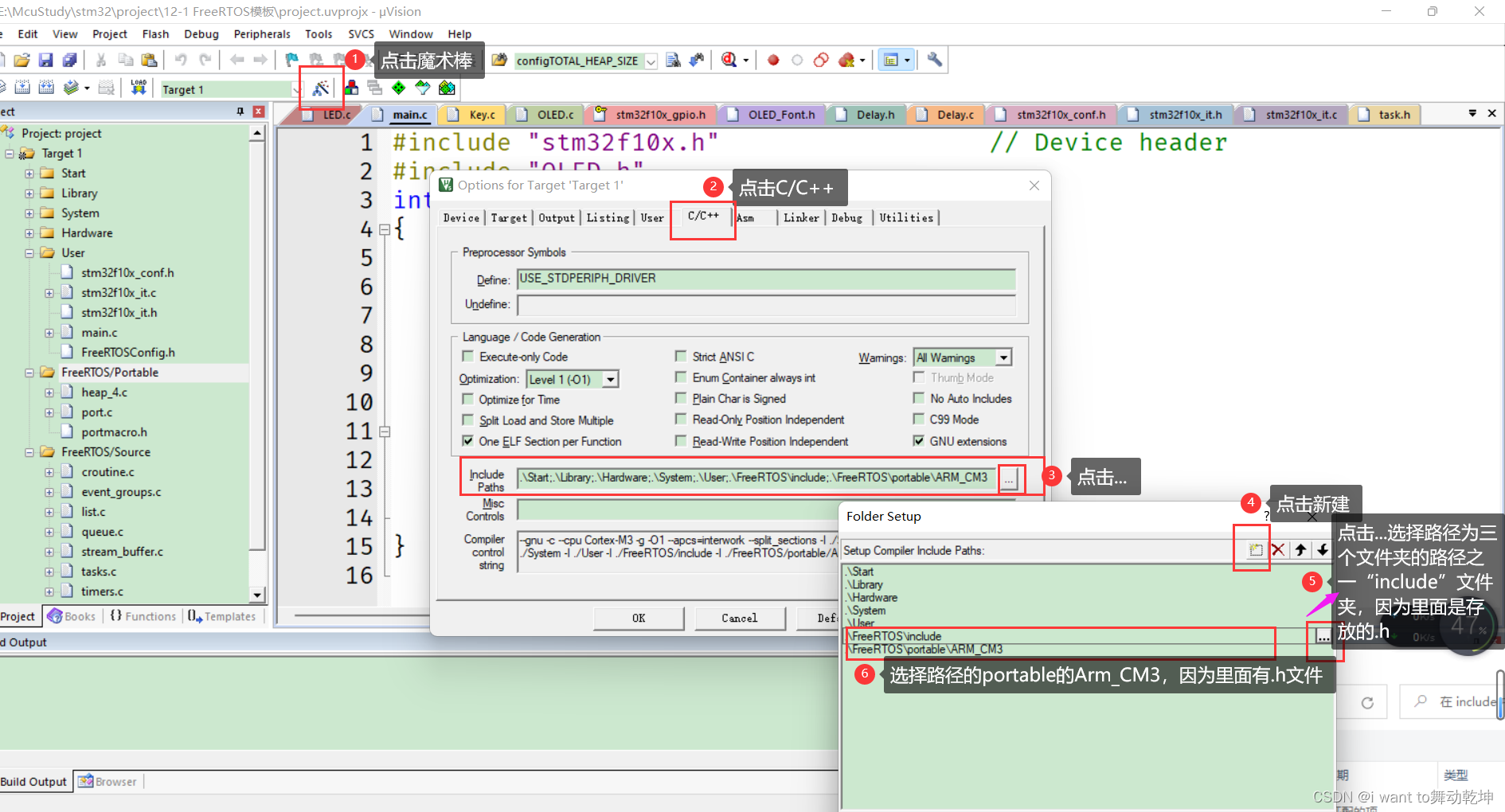
将头文件目录添加至编译器,让编译器知道.h文件路径在哪,不要忘记点OK确定按钮:
修改FreeRTOSConfig.h文件
把FreeRTOSConfig.h里面的内容替换成我下面已经裁剪好的这个:
替换里面的内容
/*
* FreeRTOS V202212.01
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* https://www.FreeRTOS.org
* https://github.com/FreeRTOS
*
*/
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/*-----------------------------------------------------------
* Application specific definitions.
*
* These definitions should be adjusted for your particular hardware and
* application requirements.
*
* THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
*
* See http://www.freertos.org/a00110.html
*----------------------------------------------------------*/
#define configUSE_PREEMPTION 1
/***************************************************************
FreeRTOS与钩子函数有关的配置选项
**************************************************************/
/* 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子
*
* 空闲任务钩子是一个函数,这个函数由用户来实现,
* FreeRTOS规定了函数的名字和参数:void vApplicationIdleHook(void ),
* 这个函数在每个空闲任务周期都会被调用
* 对于已经删除的RTOS任务,空闲任务可以释放分配给它们的堆栈内存。
* 因此必须保证空闲任务可以被CPU执行
* 使用空闲钩子函数设置CPU进入省电模式是很常见的
* 不可以调用会引起空闲任务阻塞的API函数
*/
#define configUSE_IDLE_HOOK 0 //空闲时 钩子函数 回调函数
/* 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子
*
*
* 时间片钩子是一个函数,这个函数由用户来实现,
* FreeRTOS规定了函数的名字和参数:void vApplicationTickHook(void )
* 时间片中断可以周期性的调用
* 函数必须非常短小,不能大量使用堆栈,
* 不能调用以”FromISR" 或 "FROM_ISR”结尾的API函数
*/
/*xTaskIncrementTick函数是在xPortSysTickHandler中断函数中被调用的。因此,vApplicationTickHook()函数执行的时间必须很短才行*/
#define configUSE_TICK_HOOK 0
//使用内存申请失败钩子函数
#define configUSE_MALLOC_FAILED_HOOK 0
#define configCPU_CLOCK_HZ ( ( unsigned long ) 72000000 )
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
#define configMAX_PRIORITIES ( 32 ) //可使用的最大优先级
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 128 ) //是128字,并非字节 即128*4个字节,堆栈大小以字为单位
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 17 * 1024 ) )
#define configMAX_TASK_NAME_LEN ( 16 )
#define configUSE_TRACE_FACILITY 0
#define configUSE_16_BIT_TICKS 0 //系统节拍计数器变量数据类型,1表示为16位无符号整形,0表示为32位无符号整形
#define configIDLE_SHOULD_YIELD 1 //1:空闲任务放弃CPU使用权,给其他同优先级的用户任务 2:空闲优先级和其他优先级相同。避免2,多使用1
#define configUSE_TIME_SLICING 1 //时间片调度,当优先级相同时执行
#define configUSE_QUEUE_SETS 0 //队列 为1开启,为0关闭
#define configUSE_TASK_NOTIFICATIONS 1 //开启任务通知功能,默认开启
#define configUSE_MUTEXES 0 //互斥信号量开关
#define configUSE_RECURSIVE_MUTEXES 0 //使用递归互斥信号量
#define configUSE_COUNTING_SEMAPHORES 0 //为1时使用计数信号量
/* 设置可以注册的信号量和消息队列个数 */
#define configQUEUE_REGISTRY_SIZE 10
#define configUSE_APPLICATION_TASK_TAG 0
/*****************************************************************
FreeRTOS与内存申请有关配置选项
*****************************************************************/
//支持动态内存申请
#define configSUPPORT_DYNAMIC_ALLOCATION 1
//支持静态内存
#define configSUPPORT_STATIC_ALLOCATION 0
/*
* 大于0时启用堆栈溢出检测功能,如果使用此功能
* 用户必须提供一个栈溢出钩子函数,如果使用的话
* 此值可以为1或者2,因为有两种栈溢出检测方法 */
#define configCHECK_FOR_STACK_OVERFLOW 0
/********************************************************************
FreeRTOS与运行时间和任务状态收集有关的配置选项
**********************************************************************/
//启用运行时间统计功能
#define configGENERATE_RUN_TIME_STATS 0
//启用可视化跟踪调试
#define configUSE_TRACE_FACILITY 0
/* 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数
* prvWriteNameToBuffer()
* vTaskList(),
* vTaskGetRunTimeStats()
*/
/********************************************************************
FreeRTOS与协程有关的配置选项
*********************************************************************/
//启用协程,启用协程以后必须添加文件croutine.c
#define configUSE_CO_ROUTINES 0
//协程的有效优先级数目
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
/***********************************************************************
FreeRTOS与软件定时器有关的配置选项
**********************************************************************/
//启用软件定时器
#define configUSE_TIMERS 0
//软件定时器优先级
#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES-1)
//软件定时器队列长度
#define configTIMER_QUEUE_LENGTH 10
//软件定时器任务堆栈大小
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE*2)
/*
* 某些运行FreeRTOs的硬件有两种方法选择下一个要执行的任务:
*
* 通用方法和特定于硬件的方法(以下简称"特殊方法")。
* 通用方法:
* 1.configUSE_PORT_OPTIMISED_TASK_SELECTION为О或者硬件不支持这种特殊方法。
* 2.可以用于所有FreeRTOS支持的硬件
* 3.完全用c实现,效率略低于特殊方法。
* 4.不强制要求限制最大可用优先级数目
* 特殊方法:
* 1.必须将configUSE_PORT_OPTIMISED_TASK_SELECTION设置为1。
* 2.依赖一个或多个特定架构的汇编指令(一般是类似计算前导零[CLZ]指令)。
* 3.比通用方法更高效
* 4.一般强制限定最大可用优先级数目为32
* 一般是硬件计算前导零指令,如果所使用的,MCU没有这些硬件指令的话此宏应该设置为0 !
*/
#define configUSE_PORT_OPTIMISED_TASK SELECTION 1
/*
* configUSE_TICKLESS_IDLE
* 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行
* 假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用以下办法解决
* 下载方法:
* 1.将开发版正常连接好
* 2.按住复位按键,点击下载瞬间松开复位按键
*
* 1.通过跳线帽将BO0T 0接高电平(3.3v)
* 2.重新上电,下载
* 1.使用FlyMcu擦除一下芯片,然后进行下载STMISP ->清除芯片(z)
*
*/
#define configUSE_TICKLESS_IDLE 0
/*配置必要的声明*/
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
#define INCLUDE_xTaskGetSchedulerState 1
/************************************************************
FreeRTOS可选函数配置选项
************************************************************/
#define INCLUDE_xTaskGetSchedulerState 1
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 1
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
#define INCLUDE_eTaskGetState 1
#define INCLUDE_xTimerPendFunctionCall 0
//#define INCLUDE_xTaskGetCurrentTaskHandle 1
//#define INCLUDE_uxTaskGetStackHighWaterMark 0
//#define INCLUDE_xTaskGetIdleTaskHandle 0
/******************************************************************
FreeRTOS与中断有关的配置选项
******************************************************************/
#ifdef __NVIC_PRIO_BITS
#define configPRIO_BITS __NVIC_PRIO_BITS
#else
#define configPRIO_BITS 4
#endif
//中断最低优先级
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15
//系统可管理的最高中断优先级,
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 //5指 中断优先级 0~5不被管控,中断5~15被freertos管控
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) ) /* 240 */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
/* This is the value being used as per the ST library which permits 16
priority values, 0 to 15. This must correspond to the
configKERNEL_INTERRUPT_PRIORITY setting. Here 15 corresponds to the lowest
NVIC value of 255. */
#define configLIBRARY_KERNEL_INTERRUPT_PRIORITY 15
#endif /* FREERTOS_CONFIG_H */
修改stm32f10x_it.c
1.添加头文件
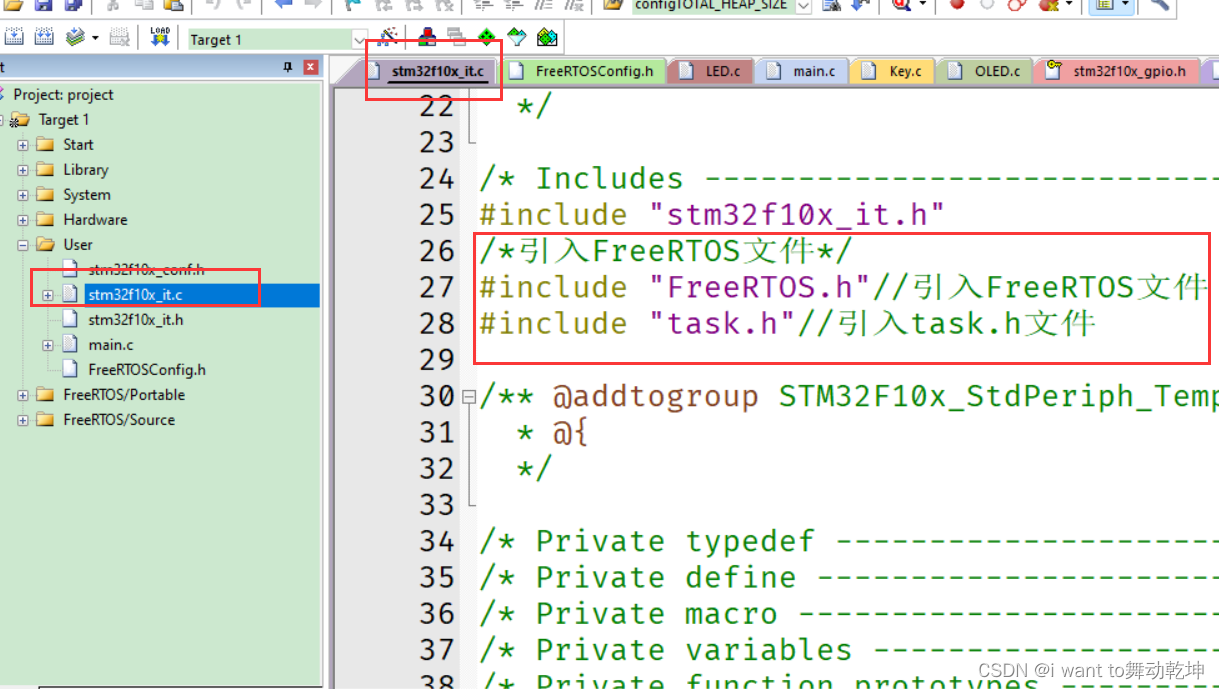
/*引入FreeRTOS文件*/
#include "FreeRTOS.h"//引入FreeRTOS文件
#include "task.h"//引入task.h文件
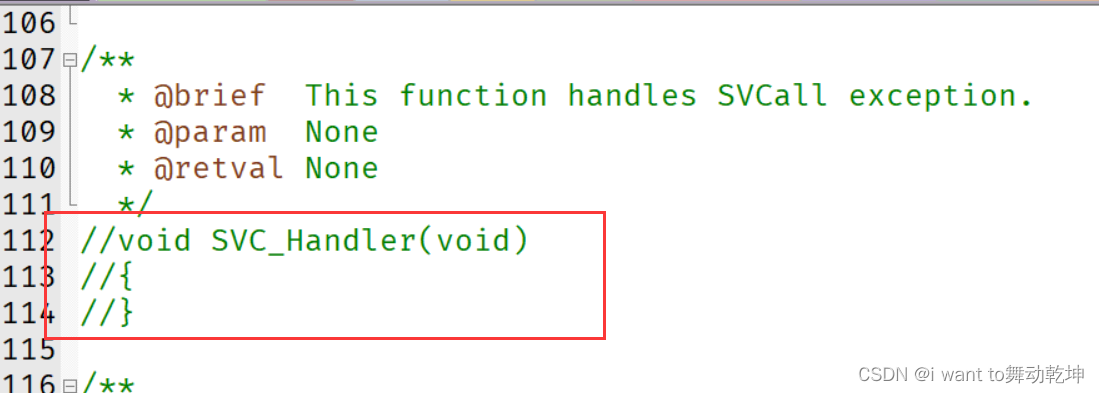
2.注释:因为FreeRTOS.h已经有定义,要用FreeRTOS里的了,如果不替换,会报重复定义的错。
3.添加内容:在SysTick_Handler(void)函数中添加内容
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//如果开启了调度
{
xPortSysTickHandler();
}
}
编译:无警告,无问题

测试
FreeRTOS闪烁第一颗小灯
main.c
#include "stm32f10x.h" // Device header
#include "LED.h"
#include "FreeRTOS.h"
#include "task.h"
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
//任务优先级
#define LED1_TASK_PRIO 2
//任务堆栈大小
#define LED1_STK_SIZE 50
//任务句柄
TaskHandle_t LED1Task_Handler;
//任务函数
void led1_task(void *pvParameters);
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
int main()
{
LED_Init();
//创建开始任务
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建LED1任务
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//LED1任务函数
void led1_task(void *pvParameters)
{
while(1)
{
LED1_ON();
vTaskDelay(1000);
LED1_OFF();
vTaskDelay(1000);
}
}
现象便是小灯1s一次的闪烁。
注意:测试小灯闪烁仅仅是在上面创建好的FreeRTOS模板中的main.c代码中加了代码而已。
完整FreeRTOS模板及小灯闪烁代码链接:
小灯闪烁及FreeRTOS动态及静态创建任务工程模板以及点灯源码
完结 ------------------------------------------------------------------ 撒花
声明:仅供学习使用