前言
今天刷完状态机的1/3,以下是书写的代码。
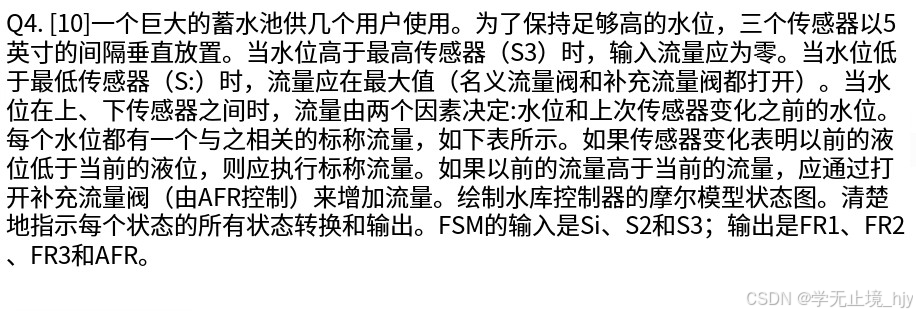
题库
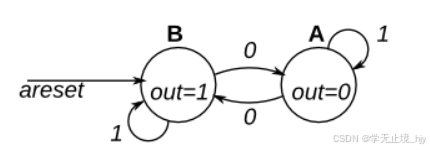
1:Fsm1(异步复位)
这是一个摩尔状态机,具有两种状态,一种输入,一种输出。实现此状态机。请注意,重置状态为 B。
本练习与FSM1S,但使用异步复位。
Solution: 本题采用两段式描述方法书写
module top_module(
input clk,
input areset, // Asynchronous reset to state B
input in,
output out);//
parameter A=0, B=1;
reg state, next_state;
always @(posedge clk, posedge areset) begin // This is a sequential always block
if(areset)
state <= B;
else
state <= next_state;
end
always @(*) begin // This is a combinational always block
//next_state = B;// State transition logic
case(state)
A:if(in == 1'b0) begin
next_state = B;
out <= 1'b0;
end
else begin
next_state = A;
out <= 1'b0;
end
B:if(in == 1'b0) begin
next_state = A;
out <= 1'b1;
end
else begin
next_state = B;
out <= 1'b1;
end
default:next_state <= next_state;
endcase
end
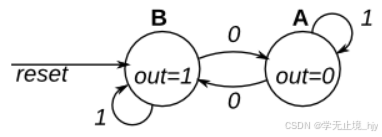
endmodule2:Fsm1(同步复位)
这是一个摩尔状态机,具有两种状态,一种输入,一种输出。实现此状态机。请注意,重置状态为 B。
本练习与FSM1 (英语),但使用同步复位。
Solution: 本题采用两段式描述方法书写
// Note the Verilog-1995 module declaration syntax here:
module top_module(clk, reset, in, out);
input clk;
input reset; // Synchronous reset to state B
input in;
output out;//
reg out;
parameter A = 0,B = 1;// Fill in state name declarations
reg present_state, next_state;
always @(posedge clk) begin
if (reset)
present_state <= B;// Fill in reset logic
else
present_state <= next_state;
end
always@(*) begin
next_state = B;
case (present_state)
A:if(in == 1'b0) begin// Fill in state transition logic
next_state = B;
out <= 1'b0;
end
else begin// Fill in state transition logic
next_state = A;
out <= 1'b0;
end
B:if(in == 1'b0)begin// Fill in state transition logic
next_state = A;
out <= 1'b1;
end
else begin// Fill in state transition logic
next_state = B;
out <= 1'b1;
end
default:next_state = next_state;
endcase
end
endmodule3:Fsm2(异步复位)
这是一个摩尔状态机,具有两种状态,一种输入,一种输出。实现此状态机。请注意,重置状态为 B。
本练习与FSM1 (英语),但使用同步复位。
Solution:
module top_module(
input clk,
input areset, // Asynchronous reset to OFF
input j,
input k,
output out); //
parameter OFF=0, ON=1;
reg state, next_state;
always @(posedge clk or posedge areset) begin
if(areset)// State flip-flops with asynchronous reset
state <= OFF;
else
state <= next_state;
end
always @(*) begin
case(state)// State transition logic
ON:if(k == 0) begin
next_state = ON;
out <= 1'b1;
end
else begin
next_state = OFF;
out <= 1'b1;
end
OFF:if(j == 0) begin
next_state = OFF;
out <= 1'b0;
end
else begin
next_state = ON;
out <= 1'b0;
end
default:next_state = next_state;
endcase
end
endmodule4:Fsm2(同步复位)
这是一个摩尔状态机,具有两个状态、两个输入和一个输出。实现此状态机。
本练习与FSM2型,但使用同步复位。
Solution:
module top_module(
input clk,
input reset, // Asynchronous reset to OFF
input j,
input k,
output out); //
parameter OFF=0, ON=1;
reg state, next_state;
always @(posedge clk) begin
if(reset)// State flip-flops with asynchronous reset
state <= OFF;
else
state <= next_state;
end
always @(*) begin
case(state)// State transition logic
ON:if(k == 0) begin
next_state = ON;
out <= 1'b1;
end
else begin
next_state = OFF;
out <= 1'b1;
end
OFF:if(j == 0) begin
next_state = OFF;
out <= 1'b0;
end
else begin
next_state = ON;
out <= 1'b0;
end
default:next_state = next_state;
endcase
end
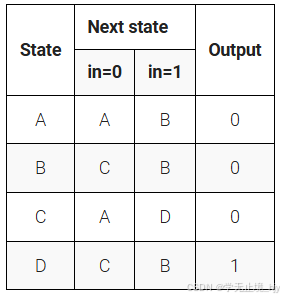
endmodule5:Fsm3comb
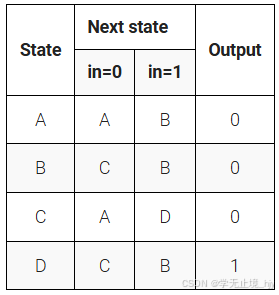
下面是具有一个输入、一个输出和四个状态的摩尔状态机的状态转换表。使用以下状态编码: A=2'b00,B=2'b01,C=2'b10,D=2'b11。
只实现该状态机的状态转换逻辑和输出逻辑(组合逻辑部分)。给定当前状态state(),根据状态转换表计算输出out()。
Solution:
module top_module(
input in,
input [1:0] state,
output [1:0] next_state,
output out); //
parameter A=0, B=1, C=2, D=3;
always @(*) begin
case(state)
A:if(in == 0) begin
next_state = A;
out <= 1'b0 ;
end
else begin
next_state = B;
out <= 1'b0 ;
end
B:if(in == 0) begin
next_state = C;
out <= 1'b0 ;
end
else begin
next_state = B;
out <= 1'b0 ;
end
C:if(in == 0) begin
next_state = A;
out <= 1'b0 ;
end
else begin
next_state = D;
out <= 1'b0 ;
end
D:if(in == 0) begin
next_state = C;
out <= 1'b1 ;
end
else begin
next_state = B;
out <= 1'b1 ;
end
default:begin
next_state = next_state;
out <= out;
end
endcase
end
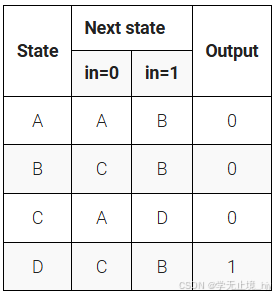
endmodule6:Fsm3onehot
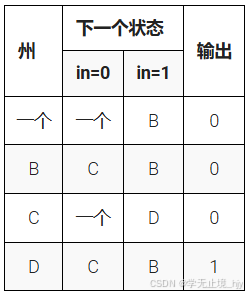
下面是具有一个输入、一个输出和四个状态的摩尔状态机的状态转换表。使用以下单次状态编码: A=4'b0001,B=4'b0010,C=4'b0100,D=4'b1000。
假定使用单次热编码,通过检验推导出状态转换和输出逻辑方程。仅实现该状态机的状态转换逻辑和输出逻辑(组合逻辑部分)。(测试平台将使用非单次热输入进行测试,以确保你没有试图做更复杂的事情)。
通过检查得出方程 是什么意思?
这意味着只需检查一个状态位,而不是所有状态位,就能确定状态机是否处于特定状态。这样,通过检查状态转换图中每个状态的输入边,就可以得到简单的状态转换逻辑方程。
例如,在上述状态机中,状态机如何才能到达状态 A?它必须使用两条输入边中的一条: "当前处于状态 A,in=0 "或 "当前处于状态 C,in=0"。由于采用了单击编码,测试 "当前处于状态 A "的逻辑方程就是状态 A 的状态位。单次编码保证了一次最多只有一个子句(乘积项)处于 "活动 "状态,因此这些子句可以直接 OR 在一起。 next_state[0] = state[0]&(~in) | state[2]&(~in)
当练习要求 "通过检查 "得到状态转换方程时,请使用这种方法。评判员会用非 "一热 "输入进行测试,以确保您的逻辑方程遵循了这种方法,而不会对非法(非 "一热")的状态位组合采取其他措施(如重置 FSM)。
虽然知道这种算法对于 RTL 级设计并不是必需的(逻辑合成器会处理这个问题),但它说明了为什么单次热 FSM 通常具有更简单的逻辑(以更多状态位存储为代价),而且这个话题经常出现在数字逻辑课程的考试中。
Solution: 看完题目给的那一大段话,然后照着写就行了。
module top_module(
input in,
input [3:0] state,
output [3:0] next_state,
output out); //
parameter A=0, B=1, C=2, D=3;
// State transition logic: Derive an equation for each state flip-flop.
assign next_state[A] = (state[A]&(~in))|(state[C]&(~in));
assign next_state[B] = (state[A]&in)|(state[B]&in)|(state[D]&in);
assign next_state[C] = (state[B]&(~in))|(state[D]&(~in));
assign next_state[D] = state[C]∈
// Output logic:
assign out = state[D];
endmodule7:Fsm3(异步复位)
另请参阅:此 FSM 的状态转换逻辑
以下是具有一个输入、一个输出和四个状态的摩尔状态机的状态转换表。实现此状态机。包括将 FSM 重置为状态 A 的异步重置。
Solution:
module top_module(
input clk,
input in,
input areset,
output out); //
parameter A = 2'b0,B = 2'b1,C = 2'd2,D = 2'd3;
reg [1:0] state,next_state;
always @(posedge clk or posedge areset) begin
if(areset)
state <= A;
else
state <= next_state;
end
always @(*) begin
case(state)
A:if(in == 0) begin
next_state = A;
out <= 1'b0 ;
end
else begin
next_state = B;
out <= 1'b0 ;
end
B:if(in == 0) begin
next_state = C;
out <= 1'b0 ;
end
else begin
next_state = B;
out <= 1'b0 ;
end
C:if(in == 0) begin
next_state = A;
out <= 1'b0 ;
end
else begin
next_state = D;
out <= 1'b0 ;
end
D:if(in == 0) begin
next_state = C;
out <= 1'b1 ;
end
else begin
next_state = B;
out <= 1'b1 ;
end
default:begin
next_state = next_state;
out <= out;
end
endcase
end
endmodule8:Fsm3(同步复位)
另请参阅:此 FSM 的状态转换逻辑
以下是具有一个输入、一个输出和四个状态的摩尔状态机的状态转换表。实现此状态机。包括将 FSM 重置为状态 A 的同步重置(这与 Fsm3 的问题相同,但具有同步重置。
Solution:
module top_module(
input clk,
input in,
input reset,
output out); //
parameter A = 2'b0,B = 2'b1,C = 2'd2,D = 2'd3;
reg [1:0] state,next_state;
always @(posedge clk) begin
if(reset)
state <= A;
else
state <= next_state;
end
always @(*) begin
case(state)
A:if(in == 0) begin
next_state = A;
out <= 1'b0 ;
end
else begin
next_state = B;
out <= 1'b0 ;
end
B:if(in == 0) begin
next_state = C;
out <= 1'b0 ;
end
else begin
next_state = B;
out <= 1'b0 ;
end
C:if(in == 0) begin
next_state = A;
out <= 1'b0 ;
end
else begin
next_state = D;
out <= 1'b0 ;
end
D:if(in == 0) begin
next_state = C;
out <= 1'b1 ;
end
else begin
next_state = B;
out <= 1'b1 ;
end
default:begin
next_state = next_state;
out <= out;
end
endcase
end
endmodule9:Design a Moore Fsm
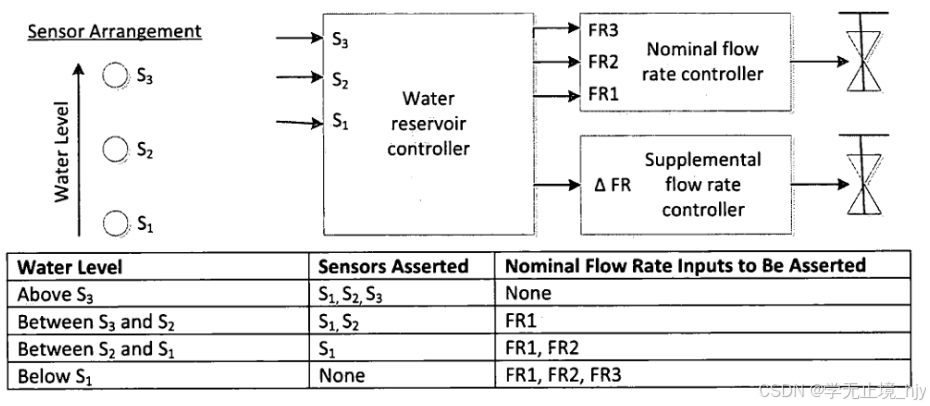
还包括高电平有效同步复位,可将状态机复位到与长时间水位低等效的状态(未断言传感器,并断言所有四个输出)。
Solution:
module top_module (
input clk,
input reset,
input [3:1] s,
output fr3,
output fr2,
output fr1,
output dfr
);
parameter s123 = 4'b0001;
parameter s23 = 4'b0010;
parameter s3 = 4'b0100;
parameter s0 = 4'b1000;
//设置状态s123:3个传感器未检测到水,s23:s1传感器检测到水,
//s3:s1和s2检测到水,s0:3个传感器都检测到水
reg [3:0] state,next_state;
reg [2:0] fr;
assign {fr3,fr2,fr1} = fr;
//第一个进程,同步时序always模块,格式化描述次态寄存器迁移到现态寄存器
always @(posedge clk) begin//本题采用三段式的写法
if(reset)
state <= s123;
else
state <= next_state;
end
//第二个进程,组合逻辑always模块,描述状态转移条件判断
always @(*) begin
case(s) //s3,s2,s1:按顺序排,0代表未检测到水,1代表检测到水。
3'b000:next_state = s123; //这里采用阻塞赋值
3'b001:next_state = s23;
3'b011:next_state = s3;
3'b111:next_state = s0;
default:next_state = s123;
endcase
end
//第三个进程,同步时序always模块,格式化描述次态寄存器输出
always @(posedge clk) begin
if(reset)
fr <= 3'b111;
else begin
case(next_state) //fr:fr3,fr2,fr1:1代表开进水阀,0代表关进水阀。
s123:fr <= 3'b111; //这里采用非阻塞赋值
s23 :fr <= 3'b011;
s3 :fr <= 3'b001;
s0 :fr <= 3'b000;
default:fr <= 3'b111;
endcase
end
end
//dfr:1代表加快水流入水箱的流速(水位降低,例如从s3到s23,即next_state < state)
//0代减慢水流入水箱的流速(水位升高,例如从s23到s3,即next_state > state)
always @(posedge clk) begin
if(reset)
dfr <= 1'b1;
else if(next_state < state)
dfr <= 1'b1;
else if(next_state > state)
dfr <= 1'b0;
else
dfr <= dfr;
end
endmodule
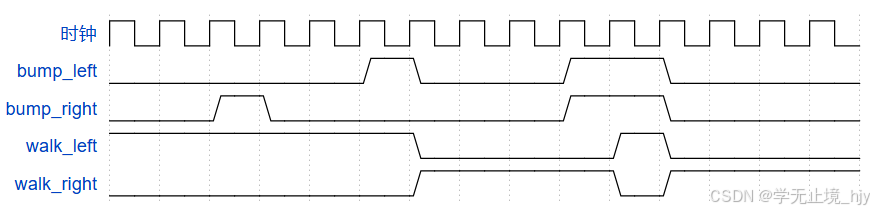
10:Lemmings1
游戏涉及大脑相当简单的小动物。如此简单,我们将使用有限状态机对其进行建模。
在旅鼠的 2D 世界中,旅鼠可以处于两种状态之一:向左走或向右走。如果它撞到障碍物,它会改变方向。特别是,如果旅鼠在左边被撞到,它会向右走。如果它在右边被撞到,它会向左走。如果它同时在两侧颠簸,它仍然会切换方向。
实现具有两个状态、两个输入和一个输出的摩尔状态机,以模拟这种行为。
Solution:
module top_module(
input clk,
input areset, // Freshly brainwashed Lemmings walk left.
input bump_left,
input bump_right,
output walk_left,
output walk_right); //
parameter LEFT=0, RIGHT=1;
reg state, next_state;
wire [1:0] bump;
assign bump = {bump_left,bump_right};
always @(posedge clk, posedge areset) begin
if(areset)
state <= LEFT;
else
state <= next_state;
end
always @(*) begin
case(state)
LEFT:if((bump == 2'b10)||(bump == 2'b11))begin
next_state = RIGHT ;
end
else begin
next_state = LEFT ;
end
RIGHT:if((bump == 2'b01)||(bump == 2'b11))begin
next_state = LEFT ;
end
else begin
next_state = RIGHT ;
end
endcase
end
// Output logic
assign walk_left = (state == LEFT);
assign walk_right = (state == RIGHT);
endmodule