CAN协议
- CAN(Controller Area Network)即控制器局域网络。
- 特点:
- 多主网络:网络上的任何节点都可以主动发送数据,不需要一个固定的主节点。
- 双绞线:使用双绞线作为通信介质,支持较远的通信距离。
- 差分信号:使用差分信号传输,增强了抗干扰能力。
- 非破坏性仲裁:多个节点同时发送数据时,具有更高优先级(较低ID)的帧会获得总线控制权。
- 错误检测:具有错误检测和容错机制,能够检测出传输错误并自动重传。
- 数据帧:标准数据帧长度为8字节,扩展数据帧可以更长。
- 传输速率:通常在125 kbps至1 Mbps之间,高速CAN可达5 Mbps。
- 工作原理:
- 帧格式:CAN协议定义了多种帧类型,包括数据帧、远程帧、错误帧和过载帧。
- 仲裁:通过帧ID进行仲裁,ID越低优先级越高。
- 位速率:所有节点必须以相同的位速率通信。
- CAN协议中主要帧类型的格式:
1. 数据帧
数据帧用于传输实际的数据。
2. 远程帧
远程帧用于请求发送具有特定ID的数据帧。
数据帧和远程帧格式:
帧起始 | 仲裁场 | 控制场 | 数据场 | CRC场 | ACK场 | 帧结束
1位 1-2字节 1字节 0-8字节 3字节 2位 7位
3. 错误帧
当某个节点检测到错误时,它会发送错误帧来中断当前传输。
错误帧格式:
错误标志 | 错误界定符
6位 8位
4. 过载帧
过载帧用于在需要更多时间来处理接收到的帧时暂时停止总线活动:
过载帧格式:
过载标志 | 过载界定符
6位 8位
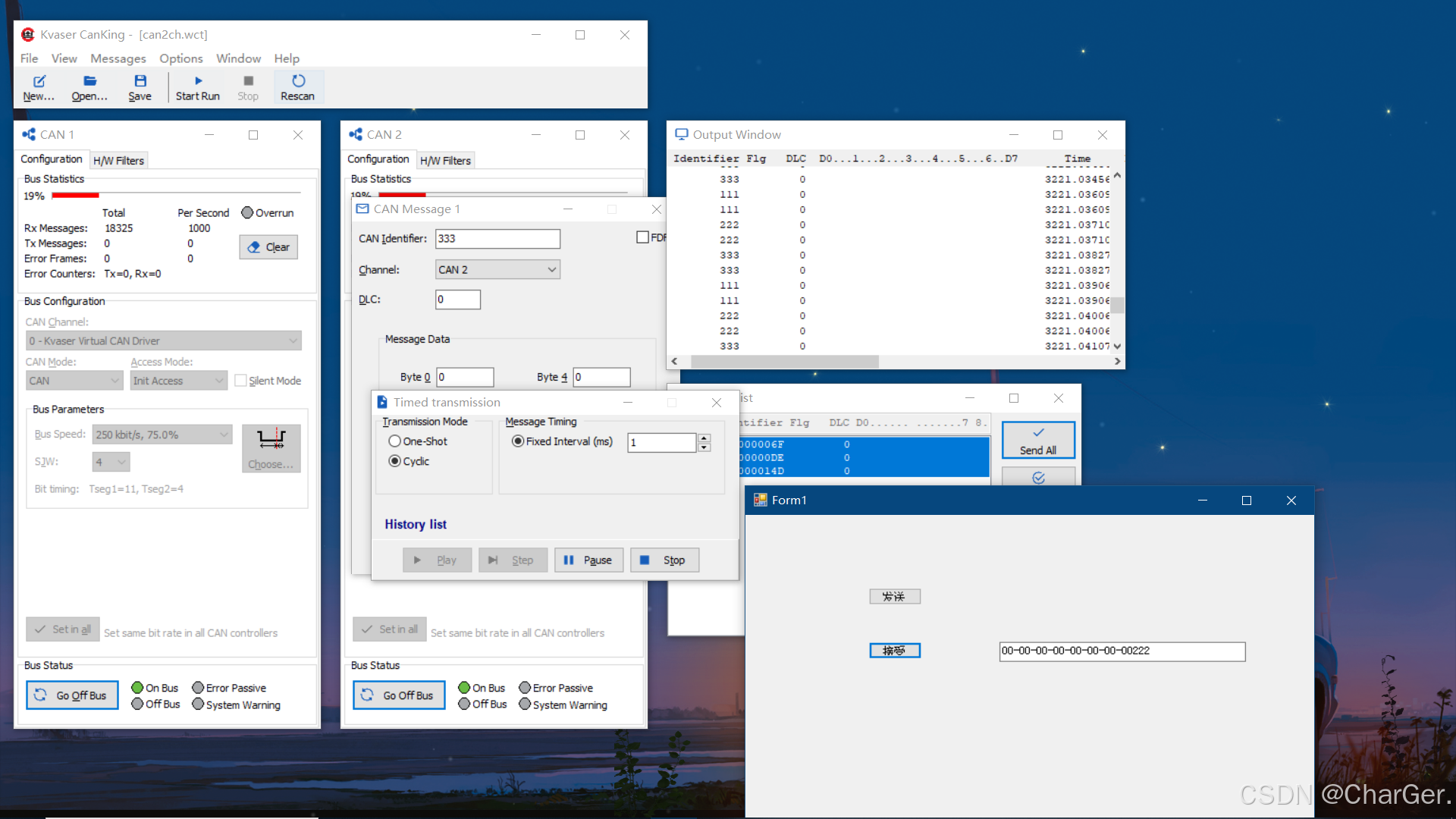
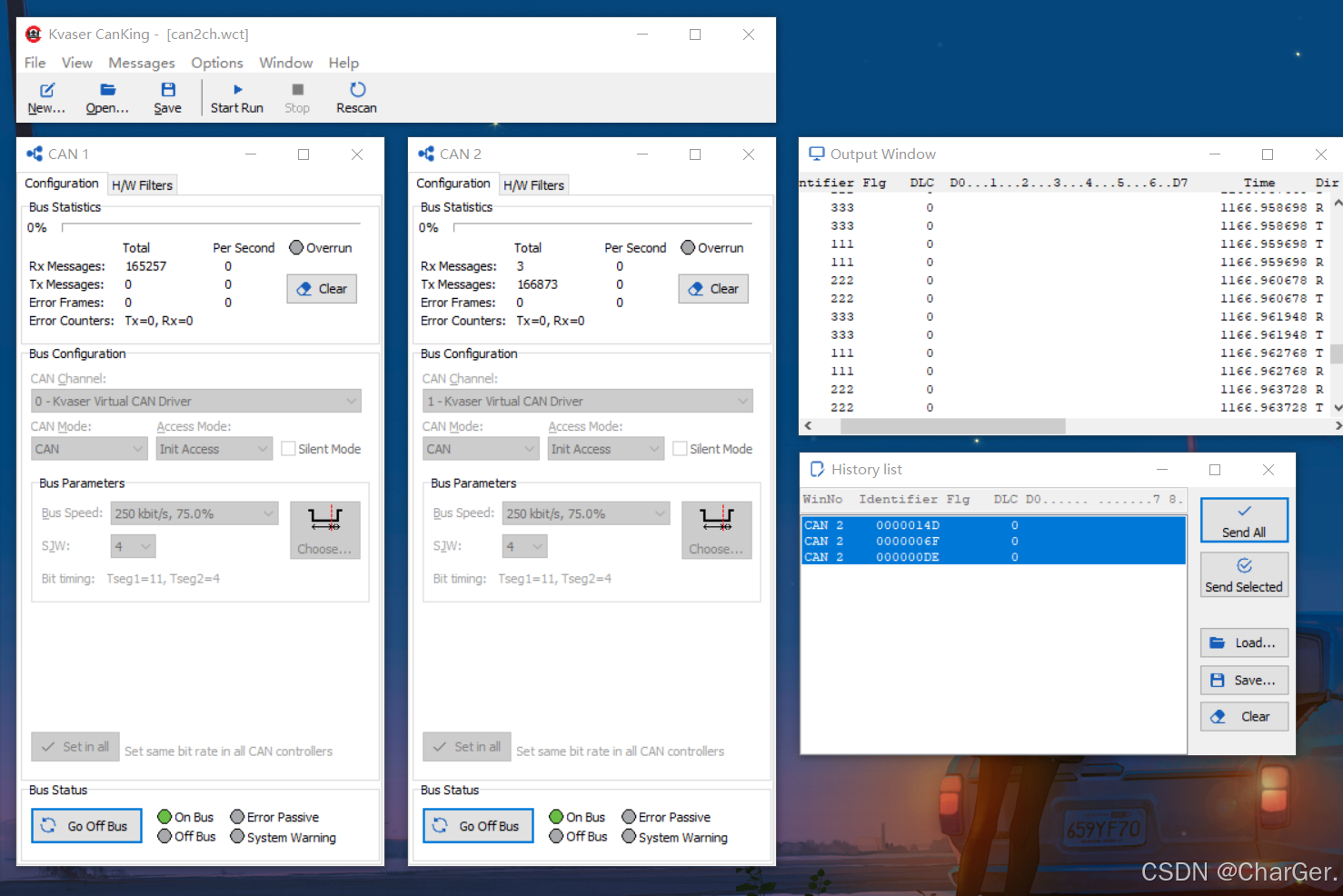
基于Kvaser实现CAN通信
配置环境:1.官网下载KvaserCANKing,KvaserCANDriver,KvaserCANDll ->
2.进行安装 -> 3.开启驱动 -> 4.开启CANKing -> 5.新建项目。
配置VS项目:1.在下载的DLL文件中找到Kvaser.Canlib库 -> 2.将此库导入vs项目 ->
3.将项目构建为X86 -> 4.将canlib32.dll放入项目文件的debug文件夹中 -> 5.重构项目
发送消息Demo:

{
//初始化Can对象
Canlib.canInitializeLibrary();
//打开通道,获取句柄
int handle = Canlib.canOpenChannel(0, Canlib.canOPEN_ACCEPT_VIRTUAL);
//通过句柄设置波特率
Canlib.canSetBitrate(handle, Canlib.canBITRATE_500K);
//打开连接
Canlib.canBusOn(handle);
//发送
byte[] dates = new byte[] { 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08 };
//句柄,消息标识符,数据,数据位,帧类型
Canlib.canWrite(handle, 456, dates, 8, Canlib.canMSG_STD);
//关闭连接
Canlib.canBusOff(handle);
}
接收消息Demo:
{
//初始化Can对象
Canlib.canInitializeLibrary();
//打开通道,获取句柄
int handle = Canlib.canOpenChannel(1, Canlib.canOPEN_ACCEPT_VIRTUAL);
//通过句柄设置波特率
Canlib.canSetBitrate(handle, Canlib.canBITRATE_500K);
//打开连接
Canlib.canBusOn(handle);
//接受
byte[] dates = new byte[8];
Canlib.canRead(handle, out int id, dates, out int dlc, out int flag, out long time).ToString();
textBox1.Text= BitConverter.ToString(dates)+id.ToString();
Canlib.canClose(handle);
}
实现功能: