欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
本文ppt来自深蓝学院《机器人中的数值优化》
目录
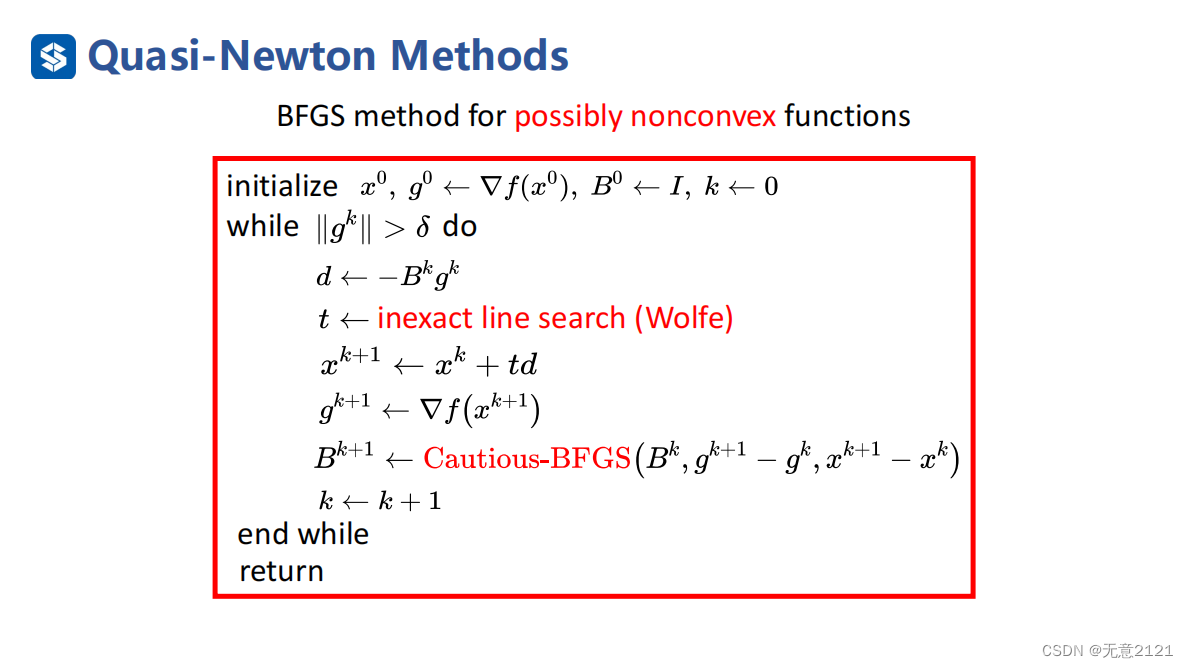
3 BFGS for nonconvex functions
1 wolfe conditions

当我们需要搜索方向是下降方向时,一定要让近似hessian的矩阵正定,这就需要满足wolfe条件
首先需要满足充分下降条件,不熟悉Armijo condition的读者请参考(5条消息) 机器人中的数值优化之最速下降法_无意2121的博客-CSDN博客
这里是weak wolfe condition:只要迭代点所在斜率大于原始点斜率的C2倍就行
这两个条件合起来就能使迭代充分下降,并且能够杜绝往前迈一小步的现象


这是一个流程关系,最终的目的是通过 wolfe conditions 保证下降方向
2 cautious update

3 BFGS for nonconvex functions