1. 原理
Nister的论文主要是奇奇怪怪的符号比较多,比较容易理解错。翻了下之前看的时候的笔记,分享出来,看看会不会有帮助。
阅读本文前,你需要有基本的矩阵,数值和多视几何的知识。
首先,你得构造约束。这个大家都知道 essential matrix的定义决定了
![\[{{\bf{q}}^{\bf{T}}}{\bf{Eq}} = {\bf{0}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlN0IlNUNiZiU3QnElN0QlN0QlNUUlN0IlNUNiZiU3QlQlN0QlN0QlN0QlN0IlNUNiZiU3QkVxJTdEJTdEKyUzRCslN0IlNUNiZiU3QjAlN0QlN0QlNUMlNUQ%3D)
如果你把E的9个成员变量完全展开,就会得到一个线性方程。
每有一个匹配点,你就可以得到一个线性方程,现在你用的是5点法,所以你有5个方程。
但是E是3乘3的矩阵,有9个成员变量,你只有五个线性方程,所以你会得到一个线性解空间,这个解空间有4个自由度。
所以我们会得到线性解空间
![\[{\bf{E}} = x{\bf{X}} + y{\bf{Y}} + z{\bf{Z}} + w{\bf{W}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QkUlN0QlN0QrJTNEK3glN0IlNUNiZiU3QlglN0QlN0QrJTJCK3klN0IlNUNiZiU3QlklN0QlN0QrJTJCK3olN0IlNUNiZiU3QlolN0QlN0QrJTJCK3clN0IlNUNiZiU3QlclN0QlN0QlNUMlNUQ%3D)
这里要多说几句,这里的 ![\[{\bf{X}},{\bf{Y}},{\bf{Z}},{\bf{W}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QlglN0QlN0QlMkMlN0IlNUNiZiU3QlklN0QlN0QlMkMlN0IlNUNiZiU3QlolN0QlN0QlMkMlN0IlNUNiZiU3QlclN0QlN0QlNUMlNUQ%3D)
![\[x,y,z,w\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUJ4JTJDeSUyQ3olMkN3JTVDJTVE)
这里需要强调两点:
1,这四个系数无论怎么取,你都能得到一个满足五个方程约束的E,但是E要成为一个essential matrix,还需要满足一些特殊的依赖,这些依赖稍后会说。
2,由于你构造的是一个齐次方程组,它的解包含一个可以任意缩放的尺度, ![\[{\bf{Ax}} = {\bf{0}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QkF4JTdEJTdEKyUzRCslN0IlNUNiZiU3QjAlN0QlN0QlNUMlNUQ%3D)
![\[s{\bf{Ax}} = {\bf{0}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUJzJTdCJTVDYmYlN0JBeCU3RCU3RCslM0QrJTdCJTVDYmYlN0IwJTdEJTdEJTVDJTVE)
![\[w = 1\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUJ3KyUzRCsxJTVDJTVE)
![\[x,y,z\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUJ4JTJDeSUyQ3olNUMlNUQ%3D)
接下来你需要做的,就是构造额外的约束,来把这三个系数
靠啥来构造约束呢?
靠essential matrix的一个性质
![\[{\bf{E}}{{\bf{E}}^{\rm{T}}}{\bf{E}} - \frac{1}{2}tr({\bf{E}}{{\bf{E}}^T}){\bf{E}} = {\bf{0}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QkUlN0QlN0QlN0IlN0IlNUNiZiU3QkUlN0QlN0QlNUUlN0IlNUNybSU3QlQlN0QlN0QlN0QlN0IlNUNiZiU3QkUlN0QlN0QrLSslNUNmcmFjJTdCMSU3RCU3QjIlN0R0ciUyOCU3QiU1Q2JmJTdCRSU3RCU3RCU3QiU3QiU1Q2JmJTdCRSU3RCU3RCU1RVQlN0QlMjklN0IlNUNiZiU3QkUlN0QlN0QrJTNEKyU3QiU1Q2JmJTdCMCU3RCU3RCU1QyU1RA%3D%3D)
![\[{\bf{E = [t}}{{\bf{]}}_{\bf{ \times }}}{\bf{R}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QkUrJTNEKyU1QnQlN0QlN0QlN0IlN0IlNUNiZiU3QiU1RCU3RCU3RF8lN0IlNUNiZiU3QislNUN0aW1lcyslN0QlN0QlN0QlN0IlNUNiZiU3QlIlN0QlN0QlNUMlNUQ%3D)
我们把![\[{\bf{E}} = x{\bf{X}} + y{\bf{Y}} + z{\bf{Z}} + {\bf{W}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QkUlN0QlN0QrJTNEK3glN0IlNUNiZiU3QlglN0QlN0QrJTJCK3klN0IlNUNiZiU3QlklN0QlN0QrJTJCK3olN0IlNUNiZiU3QlolN0QlN0QrJTJCKyU3QiU1Q2JmJTdCVyU3RCU3RCU1QyU1RA%3D%3D)
1,这里的
2,由于E是3 * 3的矩阵,他们经过乘法运算之后要等于0,相当于每一个元素都要等于0,一共可以得到九个方程。
3,
所以现在我们有九个三元三次方程构成的齐次线性方程组,这样的方程组是有唯一解的,但是毕竟是三元三次的,不太好解,所以整个论文最绕的部分来了。
先看这个很魔性的图
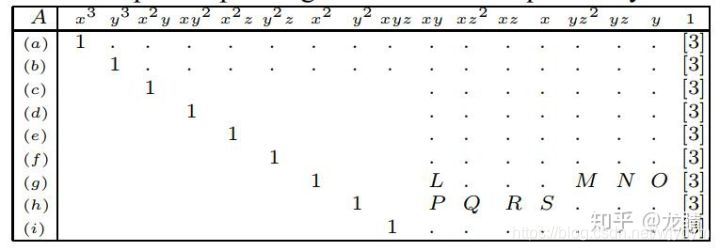
这个图要怎么理解呢?
先看第一行,这一行是我们三元三次方程,对应的各个多项式子项,这些子项我们记为向量 ![\[{\bf{\tilde x}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QiU1Q3RpbGRlK3glN0QlN0QlNUMlNUQ%3D)
再看第一列,这一列是我们几个方程对应的代号,(a)代表的是从上到下的第一个方程,(i)代表第9个方程,依次类推;
再看右下角这个大型矩阵,我们记为 ![\[{\bf{A}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QkElN0QlN0QlNUMlNUQ%3D)
![\[a{z^3} + b{z^2} + cz + d\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUJhJTdCeiU1RTMlN0QrJTJCK2IlN0J6JTVFMiU3RCslMkIrY3orJTJCK2QlNUMlNUQ%3D)
三元三次方程不好解,我们的思路是先用换元或者其他的方法,构造出一元多次方程,解出其中一个未知数,比如z,再把这个值代入,三元方程就变成了2元方程,就好解了。
为了进一步往前走,我们再确定两个事情。
首先,我们的9个方程会构成一个齐次方程组 ![\[{\bf{A\tilde x}} = {\bf{0}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QkElNUN0aWxkZSt4JTdEJTdEKyUzRCslN0IlNUNiZiU3QjAlN0QlN0QlNUMlNUQ%3D)
然后,我们看第(i)个方程,实际上他可以写成下面这样的形式
![\[(i) = xy[1] + x[2] + y[2] + [3] = 0\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlMjhpJTI5KyUzRCt4eSU1QjElNUQrJTJCK3glNUIyJTVEKyUyQit5JTVCMiU1RCslMkIrJTVCMyU1RCslM0QrMCU1QyU1RA%3D%3D)
再次提醒,这里的[1],[2],[3] 分别代表z的1阶,2阶,3阶多项式。除了z,关于x和y,只有三个系数项xy, x, y。我们实际上可以再构造几个关于关于xy, x, y的齐次方程,这样我们就能想办法消元了。
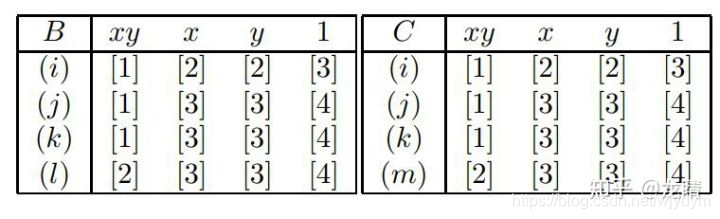
论文中构造的第一个方程是(j)
![\[(j) = (e) - z(g) = xy[1] + x[3] + y[3] + [4] = 0\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlMjhqJTI5KyUzRCslMjhlJTI5Ky0reiUyOGclMjkrJTNEK3h5JTVCMSU1RCslMkIreCU1QjMlNUQrJTJCK3klNUIzJTVEKyUyQislNUI0JTVEKyUzRCswJTVDJTVE)
(j)=0是因为(e)=0 且(g)=0。
这样(j)也是关于系数项xy, x, y的一个齐次方程
类似的方式,构造关于系数项 xy, x, y的其次方程
![\[(k) = xy[1] + x[3] + y[3] + [4] = 0\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlMjhrJTI5KyUzRCt4eSU1QjElNUQrJTJCK3glNUIzJTVEKyUyQit5JTVCMyU1RCslMkIrJTVCNCU1RCslM0QrMCU1QyU1RCs%3D)
![\[(l) = xy[2] + x[3] + y[3] + [4] = 0\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlMjhsJTI5KyUzRCt4eSU1QjIlNUQrJTJCK3glNUIzJTVEKyUyQit5JTVCMyU1RCslMkIrJTVCNCU1RCslM0QrMCU1QyU1RA%3D%3D)
![\[(m) = xy[2] + x[3] + y[3] + [4] = 0\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlMjhtJTI5KyUzRCt4eSU1QjIlNUQrJTJCK3glNUIzJTVEKyUyQit5JTVCMyU1RCslMkIrJTVCNCU1RCslM0QrMCU1QyU1RA%3D%3D)
又要注意了,这里有很多个[1],[2],[3],[4],每一个分别代表一个z的多项式。
通过(i)到(m)这几个方程,都是关于xy,x,y,1的方程,我们可以把它写成系数矩阵的形式
令
我们有5个方程,实际上可以构造2个 4 * 4 的系数矩阵,分别定义为B 和 C
显然我们有齐次线性方程组
![\[{\bf{B\hat x}} = {\bf{0}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QkIlNUNoYXQreCU3RCU3RCslM0QrJTdCJTVDYmYlN0IwJTdEJTdEJTVDJTVE)
这两个系数矩阵B和C中的每一个元素,都是z的多项式。而且这两个齐次方程组,都是有非零解的,注意 ![\[{\bf{\hat x}} = {(xy,x,y,1)^T}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QiU1Q2hhdCt4JTdEJTdEKyUzRCslN0IlMjh4eSUyQ3glMkN5JTJDMSUyOSU1RVQlN0QlNUMlNUQ%3D)
计算4 * 4矩阵的行列式计算,不是太难,但是由于每一个元素都是关于z的多项式,行列式本身,也是z的多项式。我们记为
![\[\begin{array}{*{20}{c}} {(n) = \det ({\bf{B}}) = [11]=0}\\ {(o) = \det ({\bf{C}}) = [11]=0} \end{array}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlNUNiZWdpbiU3QmFycmF5JTdEJTdCJTJBJTdCMjAlN0QlN0JjJTdEJTdEKyU3QiUyOG4lMjkrJTNEKyU1Q2RldCslMjglN0IlNUNiZiU3QkIlN0QlN0QlMjkrJTNEKyU1QjExJTVEJTNEMCU3RCU1QyU1QyslN0IlMjhvJTI5KyUzRCslNUNkZXQrJTI4JTdCJTVDYmYlN0JDJTdEJTdEJTI5KyUzRCslNUIxMSU1RCUzRDAlN0QrJTVDZW5kJTdCYXJyYXklN0QlNUMlNUQ%3D)
实际上我们已经搞出了两个只跟z有关的方程,但是这个方程是一个11阶多项式。
为啥是11阶,因为行列式的值是不同行不同列乘加的结果,B和C中最高可以搞出11次项。
当然,两个11阶齐次方程,之间,如果把11阶项消元了,就可以得到一个10阶多项式
![\[(p) \equiv (n){o_{11}} - (o){n_{11}} = [10] = 0\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlMjhwJTI5KyU1Q2VxdWl2KyUyOG4lMjklN0JvXyU3QjExJTdEJTdEKy0rJTI4byUyOSU3Qm5fJTdCMTElN0QlN0QrJTNEKyU1QjEwJTVEKyUzRCswJTVDJTVE)
怎么解这个10元一次方程呢?论文中的意思是用Sturm sequence去一点一点逼近。关于这个,给个传送门Sturm's theorem - Wikipedia。基本求解的思路是用Sturm的理论,可以确定一个多项式,在一个区间[a,b]之间的符号变化。如果在[a,b]直接有符号变化,则在这个区间一定是有解的,一点一点缩小区域去逼近即可。
其实到这里,这篇论文应该已经看懂了,当然10阶多项式的解多半不止一个,之后需要把每一个z的解,带回到 ![\[{\bf{C\hat x}} = {\bf{0}}\]](/image/aHR0cHM6Ly93d3cuemhpaHUuY29tL2VxdWF0aW9uP3RleD0lNUMlNUIlN0IlNUNiZiU3QkMlNUNoYXQreCU3RCU3RCslM0QrJTdCJTVDYmYlN0IwJTdEJTdEJTVDJTVE)
要挑选出正确的那个本质矩阵,你需要把本质矩阵分解成R,T,如果不知道怎么分,可以去看多视几何那本书。有了RT,你就可以拿RT来三角化每一组匹配点,得到他们的三维空间坐标。然后把这个坐标投影到两侧相机的坐标系,其中任意一个坐标系下,如果z是负的,说明这组解是不科学的。因为相机没办法看到身后的物体。这样你就可以筛选出正确的解了。需要注意本质矩阵乘以一个尺度之后,含义不会发生变化。
2. matlab程序
(An Efficient Solution to the Five-Point Relative Pose Problem)
[R_true, ~] = qr(randn(3));
t_true = randn(3,1);
t_true = t_true / norm(t_true);
tx = [0 -t_true(3) t_true(2);
t_true(3) 0 -t_true(1);
-t_true(2) t_true(1) 0];
K = eye(3);
E_true = K' * tx * R_true * K;
disp('ground truth t:');
disp(t_true');
disp('ground truth R:');
disp(R_true);
P = randn(5, 3);
P1 = (eye(3) * P')';
P2 = (R_true * P' + t_true)';
q = [P1(:,1).*P2(:,1) P1(:,2).*P2(:,1) P1(:,3).*P2(:,1) ...
P1(:,1).*P2(:,2) P1(:,2).*P2(:,2) P1(:,3).*P2(:,2) ...
P1(:,1).*P2(:,3) P1(:,2).*P2(:,3) P1(:,3).*P2(:,3)];
[~,~,V] = svd(q);
% in x, y, z, 1 order
E_poly = V(:,6:9);
% 11, 12, 13, 21, 22, 23, 31, 32, 33
detE = o2(o1(E_poly(2,:), E_poly(6,:)) - o1(E_poly(3,:), E_poly(5,:)), E_poly(7,:)) + ...
o2(o1(E_poly(3,:), E_poly(4,:)) - o1(E_poly(1,:), E_poly(6,:)), E_poly(8,:)) + ...
o2(o1(E_poly(1,:), E_poly(5,:)) - o1(E_poly(2,:), E_poly(4,:)), E_poly(9,:));
EET = zeros(3,3,10);
for i = 1:3
for j = 1:3
for k = 1:3
EET(i,j,:) = squeeze(EET(i,j,:)) + o1(E_poly((i-1)*3+k,:), E_poly((j-1)*3+k,:));
end
end
end
eta = zeros(3,3,10);
for i = 1:3
for j = 1:3
eta(i,j,:) = EET(i,j,:);
if i == j
for k = 1:3
eta(i,j,:) = eta(i,j,:) - 0.5*EET(k,k,:);
end
end
end
end
etaE = zeros(3,3,20);
for i = 1:3
for j = 1:3
for k = 1:3
etaE(i,j,:) = squeeze(etaE(i,j,:)) + o2(squeeze(eta(i,k,:)), E_poly((k-1)*3+j,:));
end
end
end
A = [detE'; reshape(etaE, [9, 20])];
A = rref(A);
% if [x y 1] is the solution to A(5:10,11:13 14:16 17:20),
% then [x y 1] is the solution to B;
% which means {sol(A(5:10,11:13 14:16 17:20))} is contained in {sol(B)}
% up to tenth degree
B = zeros(3, 3, 11);
for k = 1:3
B(k,:,:) = [[0 0 0 0 0 0 0 0 A(3+2*k,11:13)]; [0 0 0 0 0 0 0 0 A(3+2*k,14:16)]; [0 0 0 0 0 0 0 A(3+2*k,17:20)]] - ...
[[0 0 0 0 0 0 0 A(4+2*k,11:13) 0]; [0 0 0 0 0 0 0 A(4+2*k,14:16) 0]; [0 0 0 0 0 0 A(4+2*k,17:20) 0]];
end
detB = oz(oz(squeeze(B(1,2,:)), squeeze(B(2,3,:)))-oz(squeeze(B(1,3,:)), squeeze(B(2,2,:))), squeeze(B(3,1,:))) + ...
oz(oz(squeeze(B(1,3,:)), squeeze(B(2,1,:)))-oz(squeeze(B(1,1,:)), squeeze(B(2,3,:))), squeeze(B(3,2,:))) + ...
oz(oz(squeeze(B(1,1,:)), squeeze(B(2,2,:)))-oz(squeeze(B(1,2,:)), squeeze(B(2,1,:))), squeeze(B(3,3,:)));
z = roots(detB);
% z = z(:,1);
z_cand = real(z(abs(imag(z)) < 1e-7));
% one of the results is the true solution
for i = 1:length(z_cand)
z = z_cand(i);
B_recovered = reshape(reshape(B, [9, 11]) * [0 0 0 0 0 0 z^4 z^3 z^2 z^1 1]', [3, 3]);
% sanity check
% this should be near zero
detB_recovered = det(B_recovered);
[~,~,V] = svd(B_recovered);
x = V(1,3)/V(3,3);
y = V(2,3)/V(3,3);
E_recovered = reshape(E_poly * [x;y;z;1], [3, 3])';
[U,S,V] = svd(E_recovered);
% enforce positive U, V
if det(U) < 0
E_recovered = -E_recovered;
end
if det(V) < 0
E_recovered = -E_recovered;
end
t_recovered = U(:,3);
disp('find one possible solution (up to scale):');
disp('t:');
disp(t_recovered');
D = [0 1 0;-1 0 0;0 0 1];
disp('possible R1:');
Ra_recovered = U * D * V';
disp(Ra_recovered);
disp('possible R2:');
Rb_recovered = U * D' * V';
disp(Rb_recovered);
% sanity check
% these two should be near zero
detE_recovered = det(E_recovered);
constraint = E_recovered*E_recovered'*E_recovered - 0.5 * trace(E_recovered*E_recovered')*E_recovered;
end
% give two x, y, z, 1, return product in x^2, y^2, z^2, xy, xz, yz, x, y,
% z, 1 order
function r = o1(a,b)
p = a' * b;
r = [p(1,1) p(2,2) p(3,3) p(1,2)+p(2,1) p(1,3)+p(3,1) p(2,3)+p(3,2) ...
p(1,4)+p(4,1) p(2,4)+p(4,2) p(3,4)+p(4,3) p(4,4)]';
end
% give x^2, y^2, z^2, xy, xz, yz, x, y, z, 1 and x, y, z, 1
% return x^3, y^3, x^2y, xy^2, x^2z, x^2, y^2z, y^2, xyz, xy, z^2x, zx, x,
% z^2y, zy, y, z^3, z^2, z, 1
function r = o2(a,b)
p = b' * a';
r = [p(1,1) p(2,2) p(1,4)+p(2,1) p(1,2)+p(2,4) ...
p(1,5)+p(3,1) p(1,7)+p(4,1) p(2,6)+p(3,2) ...
p(2,8)+p(4,2) p(1,6)+p(2,5)+p(3,4) p(1,8)+p(2,7)+p(4,4) ...
p(1,3)+p(3,5) p(1,9)+p(4,5)+p(3,7) p(1,10)+p(4,7) p(2,3)+p(3,6) ...
p(2,9)+p(3,8)+p(4,6) p(2,10)+p(4,8) p(3,3) p(3,9)+p(4,3) ...
p(3,10)+p(4,9) p(4,10)]';
end
% mutliply two z polynomials
function r = oz(a,b)
da = 11-find(logical(a),1,'first');
db = 11-find(logical(b),1,'first');
p = a * b';
r = zeros(11,1);
for i = 0:da
for j = 0:db
r(11-i-j) = r(11-i-j)+p(11-i,11-j);
end
end
end