教程基于《无人驾驶原理与实践》3.3.4,请结合此书学习。
教程源码下载:https://download.csdn.net/download/xiangxiang613/13192600
解压后,此教程文件结构如下:
build文件夹:
说明:
1.cloud1.pcd和cloud2.pcd为用于配准的点云文件,cloud3.pcd为保存配准后的点云图文件,最终将用于可视化。
2.修改程序:
原配置文件中的路径为:/home/adam/book_code/chapter_3/NDT_PCL_demo
需要修改为自己的项目文件路径后才能cmake通过,eg:/home/tzx/book_code/chapter_3/NDT_PCL_demo
涉及的文件有:build/CMakeCache.txt, build/cmake_install.cmake, 以及build/Makefile,
用查找替换功能很方便替换!
3.需要编写的核心文件为nomal_distributions_transform.cpp(文件名在书中没有提及名称)
nomal_distributions_transform.cpp代码:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/registration/ndt.h>
#include <pcl/filters/approximate_voxel_grid.h>
#include <pcl/visualization/pcl_visualizer.h>
// 代码清单3-5 读取点云信息
pcl::PointCloud<pcl::PointXYZ>::Ptr read_cloud_point(std::string const &file_path){
// Loading first scan.
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> (file_path, *cloud) == -1)
{
PCL_ERROR ("Couldn't read the pcd file\n");
return nullptr;
}
return cloud;
}
// 代码清单3-13 将配准以后的点云图可视化
void visualizer(pcl::PointCloud<pcl::PointXYZ>::Ptr target_cloud, pcl::PointCloud<pcl::PointXYZ>::Ptr output_cloud){
// Initializing point cloud visualizer
boost::shared_ptr<pcl::visualization::PCLVisualizer>
viewer_final (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer_final->setBackgroundColor (0, 0, 0);
// Coloring and visualizing target cloud (red).
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>
target_color (target_cloud, 255, 0, 0);
viewer_final->addPointCloud<pcl::PointXYZ> (target_cloud, target_color, "target cloud");
viewer_final->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
1, "target cloud");
// Coloring and visualizing transformed input cloud (green).
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>
output_color (output_cloud, 0, 255, 0);
viewer_final->addPointCloud<pcl::PointXYZ> (output_cloud, output_color, "output cloud");
viewer_final->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
1, "output cloud");
// Starting visualizer
viewer_final->addCoordinateSystem (1.0, "global");
viewer_final->initCameraParameters ();
// Wait until visualizer window is closed.
while (!viewer_final->wasStopped ())
{
viewer_final->spinOnce (100);
boost::this_thread::sleep (boost::posix_time::microseconds (100000));
}
}
int main(int argc, char **argv) {
// 代码清单3-6 读取点云
auto target_cloud = read_cloud_point(argv[1]); // arg[1]就是cloud1.pcd
std::cout << "Loaded " << target_cloud->size () << " data points from cloud1.pcd" << std::endl;
auto input_cloud = read_cloud_point(argv[2]); // arg[2]就是cloud2.pcd
std::cout << "Loaded " << input_cloud->size () << " data points from cloud2.pcd" << std::endl;
// 代码清单3-8 过滤输入点云
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::ApproximateVoxelGrid<pcl::PointXYZ> approximate_voxel_filter;
approximate_voxel_filter.setLeafSize(0.2, 0.2, 0.2);
approximate_voxel_filter.setInputCloud(input_cloud);
approximate_voxel_filter.filter(*filtered_cloud);
std::cout<<"Filtered cloud contains "<< filtered_cloud->size() << "data points from cloud2.pcd" << std::endl;
// 代码清单3-10 初始化NDT并且设置NDT参数
pcl::NormalDistributionsTransform<pcl::PointXYZ, pcl::PointXYZ> ndt;
ndt.setTransformationEpsilon(0.01);
ndt.setStepSize(0.1);
ndt.setResolution(1.0);
ndt.setMaximumIterations(35);
ndt.setInputSource(filtered_cloud);
ndt.setInputTarget(target_cloud);
// 代码清单3-11 初始化变换参数并开始优化
Eigen::AngleAxisf init_rotation(0.6931, Eigen::Vector3f::UnitZ());
Eigen::Translation3f init_translation (1.79387, 0.720047, 0);
Eigen::Matrix4f init_guess = (init_translation * init_rotation).matrix();
pcl::PointCloud<pcl::PointXYZ>::Ptr output_cloud (new pcl::PointCloud<pcl::PointXYZ>);
ndt.align(*output_cloud, init_guess);
std::cout << "Normal Distribution Transform has converged:" << ndt.hasConverged()
<< "score: " << ndt.getFitnessScore() << std::endl;
// 代码清单3-12 保存配准以后的点云图,输出到文件cloud3.pcd
pcl::transformPointCloud(*input_cloud, *output_cloud, ndt.getFinalTransformation());
pcl::io::savePCDFileASCII("../cloud3.pcd", *output_cloud);
// 代码清单3-13 将配准以后的点云图可视化
visualizer(target_cloud, output_cloud);
return 0;
}
怎么使用?(书中没有提及,但项目内的README.md有说明)
——————————————————————————————————————————————————
这里演示一下!
-
cd到项目的build路径:
eg:cd ~/book_code/chapter_3/NDT_PCL_demo/build/ -
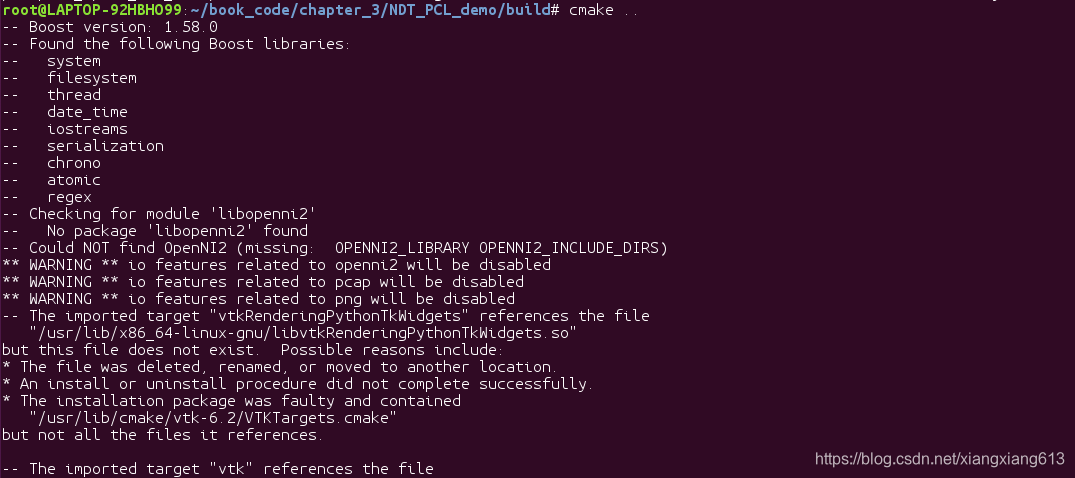
在build路径下输入以下命令:
cmake …
编译信息很多,最后会显示如下,表示编译成功:
-
在build路径下,接着输入命令:
make
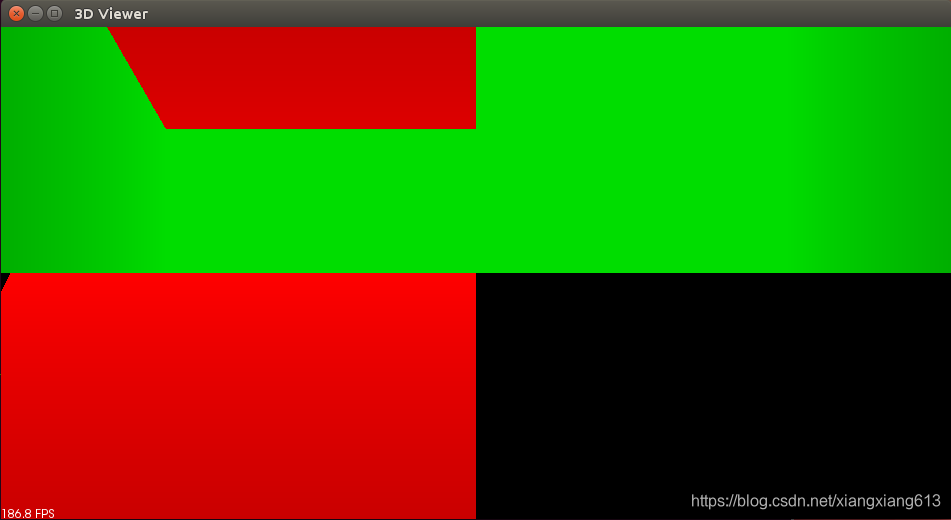
4.在build路径下,执行编译结果,可视化点云图:
./normal_distributions_transform …/cloud1.pcd …/cloud2.pcd
此时会弹出一个新的窗口,显示如下:
这个看不出什么,把它缩小一点就有感觉了。
在此窗口内,滚动鼠标滑轮即可实现缩放查看全局,按住滑动可实现平移拖动,如下所示:
OK,演示结束!其它请结合书中内容学习。