最近在看CS231N的课程,同时也顺带做配套的作业,在Assignment2 中关于Batch Normalization的具体数学过程则困惑了很久,通过参看一些博客自己推导了一遍,供大家参考。
Batch Normalization
首先,关于Batch Normalization的具体实现过程就不在此介绍了,想了解的可以参看论文或者博客。
对于Batch Normalization的前向传播可以参看下图的过程,它主要思路就是将每个Batch的输入根据均值
μB
和方差
2B
进行归一化,然后再进行尺度缩放到
yi
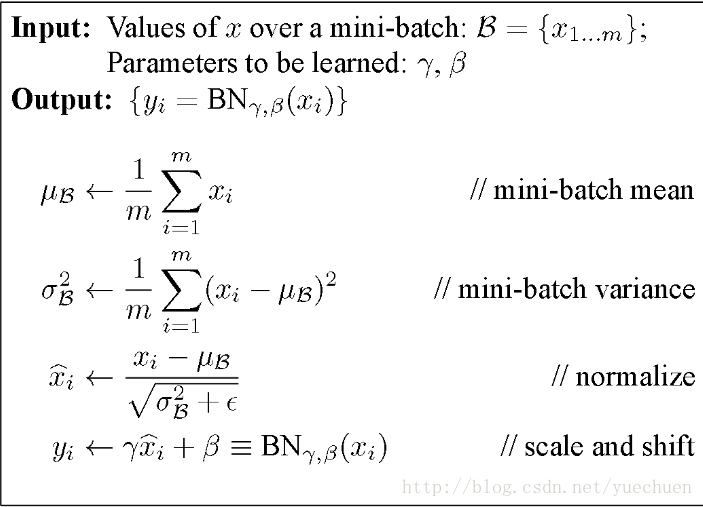
对于前向传播网络,可以很直观的给出实现代码
def batchnorm_forward(x, gamma, beta, bn_param):
"""
Input:
- x: (N, D)维输入数据
- gamma: (D,)维尺度变化参数
- beta: (D,)维尺度变化参数
- bn_param: Dictionary with the following keys:
- mode: 'train' 或者 'test'
- eps: 一般取1e-8~1e-4
- momentum: 计算均值、方差的更新参数
- running_mean: (D,)动态变化array存储训练集的均值
- running_var:(D,)动态变化array存储训练集的方差
Returns a tuple of:
- out: 输出y_i(N,D)维
- cache: 存储反向传播所需数据
"""
mode = bn_param['mode']
eps = bn_param.get('eps', 1e-5)
momentum = bn_param.get('momentum', 0.9)
N, D = x.shape
# 动态变量,存储训练集的均值方差
running_mean = bn_param.get('running_mean', np.zeros(D, dtype=x.dtype))
running_var = bn_param.get('running_var', np.zeros(D, dtype=x.dtype))
out, cache = None, None
# TRAIN 对每个batch操作
if mode == 'train':
sample_mean = np.mean(x, axis = 0)
sample_var = np.var(x, axis = 0)
x_hat = (x - sample_mean) / np.sqrt(sample_var + eps)
out = gamma * x_hat + beta
cache = (x, gamma, beta, x_hat, sample_mean, sample_var, eps)
running_mean = momentum * running_mean + (1 - momentum) * sample_mean
running_var = momentum * running_var + (1 - momentum) * sample_var
# TEST:要用整个训练集的均值、方差
elif mode == 'test':
x_hat = (x - running_mean) / np.sqrt(running_var + eps)
out = gamma * x_hat + beta
else:
raise ValueError('Invalid forward batchnorm mode "%s"' % mode)
bn_param['running_mean'] = running_mean
bn_param['running_var'] = running_var
return out, cache上述代码基于CS231N Assignment2,值得注意的是Batch Normalization对于在训练和测试阶段的计算方法不一样,因为训练阶段的均值和方差是基于一个Batch的数据,而测试阶段是基于整个训练集求得。
梯度反向传播
Batch Normalization最让人头疼的就是理清楚反向传播梯度并写成代码,当然它依然遵循链式求导法则。首先我们基于上图,将变量定义如下:
- σ 为一个batch所有样本的方差
- μ 为样本均值
- xˆ 为归一化后的样本数据
- yi 为输入样本 xi 经过尺度变化的输出量
- γ 和 β 为尺度变化系数
-
∂L∂y
为已知,并假设
x
和
y 都为(N,D)维,即有N个维度为D的样本
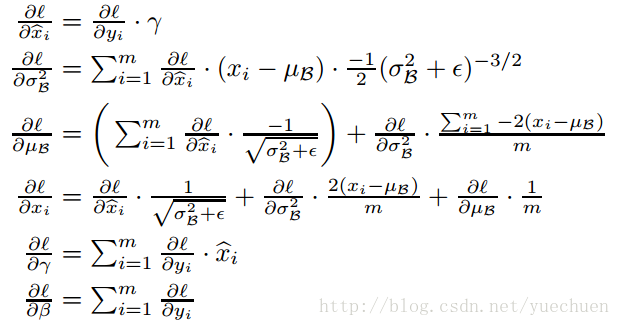
由于网络正向传播是根据 γ β 和 xˆ 将 xi 变换为 yi ,那么反向传播则是根据 ∂L∂yi 求得 ∂L∂γ ∂L∂β 和 ∂L∂xi 。
上面两个式子都涉及到Batch中的N个样本的累加,因为N个样本的 yi 对 β γ 都有影响。
直接求 ∂L∂xi 步骤比较长,不直观,且 μ(x) 、 σ(x) 、 xˆ(x) ,因此我们首先求 ∂L∂xˆ 、 ∂L∂μ 和 ∂L∂σ :
下面,就可以求
∂L∂xi
啦:
在上面的式子中我写成 ∂L∂xi 而不是 ∂L∂x 是为了方便理解,当然在代码中我们会表示成后者以提高计算速度。至此,我们就完成了Batch Normalization的梯度反向传播的全过程,并得到论文给出的结果:
下面,我们就根据上面的步骤来完成代码:
def batchnorm_backward(dout, cache):
"""
Inputs:
- dout: 上一层的梯度,维度(N, D),即 dL/dy
- cache: 所需的中间变量,来自于前向传播
Returns a tuple of:
- dx: (N, D)维的 dL/dx
- dgamma: (D,)维的dL/dgamma
- dbeta: (D,)维的dL/dbeta
"""
x, gamma, beta, x_hat, sample_mean, sample_var, eps = cache
N = x.shape[0]
dgamma = np.sum(dout * x_hat, axis = 0)
dbeta = np.sum(dout, axis = 0)
dx_hat = dout * gamma
dsigma = -0.5 * np.sum(dx_hat * (x - sample_mean), axis=0) * np.power(sample_var + eps, -1.5)
dmu = -np.sum(dx_hat / np.sqrt(sample_var + eps), axis=0) - 2 * dsigma*np.sum(x-sample_mean, axis=0)/ N
dx = dx_hat /np.sqrt(sample_var + eps) + 2.0 * dsigma * (x - sample_mean) / N + dmu / N
return dx, dgamma, dbeta