概述
什么是pnc map
PncMap是Planning and Control Map的缩写,即用于规划控制使用的地图
- 这是Planning用来对接Routing搜索结果的子模块。
- pnc map是专门为规划控制模块设计的库函数。 它在hd map层次之上,负责一些地图相关信息的处理。比如查询车辆可能的路由段,然后对每个路由段合成一个路径path。
pnc map作用
pnc map的作用就是将routing的结果,进行一系列的操作处理,找到一个局部的(固定长度),可以供规划使用的,车辆能够正常驶入的局部地图(RouteSegments),后续用于生成规划中的ReferenceLine结构。
为什么有了高精地图还需要pnc_map
- 为规划模块的独立性更高,避免与高精地图的数据格式耦合,导致可迁移性变差。
作用
pnc map主要是将routing发送的轨迹规划转变为能够生成reference的中间数据
-
pnc_map封装在reference_line_provider下,主要供其在由routing结果到ReferenceLine的过程中做前期准备。
-
PncMap类负责对接Routing搜索结果的更新。它会根据车辆当前位置,提供车辆周边的RouteSegments信息供ReferenceLineProvider生成ReferenceLine。
“车辆周边”与车辆的纵向和横向相关,具体如下:
- 对于纵向来说,PncMap返回的结果是前后一定范围内的。
- 具体的范围由下面三个值决定:
- 即:向后是30米的范围。向前是根据车辆的速度返回180米或者250米的范围。
// modules/map/pnc_map/pnc_map.cc
DEFINE_double(
look_backward_distance, 30,
"look backward this distance when creating reference line from routing");
DEFINE_double(look_forward_short_distance, 180,
"short look forward this distance when creating reference line "
"from routing when ADC is slow");
DEFINE_double(
look_forward_long_distance, 250,
"look forward this distance when creating reference line from routing");
- 对于横向来说,如果Routing的搜索结果包含变道的信息。则PncMap提供的数据会包含自车所在车道和变道后的相关通路。
PncMap中的下面这个方法用来接收车辆的状态更新。当然,这其中很重要的就是位置状态。
bool PncMap::UpdateVehicleState(const VehicleState &vehicle_state)
此时PncMap会计算车辆已经经过了哪些Routing的途经点,以及下一个目标点等信息。
在每一个Planning计算循环中,ReferenceLineProvider都会传入车辆的VehicleState给PncMap,并从PncMap获取车辆周围的通路(RouteSegments)。
PncMap中的下面这个方法返回Routing途经点还有哪些没有达到:
std::vector<routing::LaneWaypoint> PncMap::FutureRouteWaypoints() const
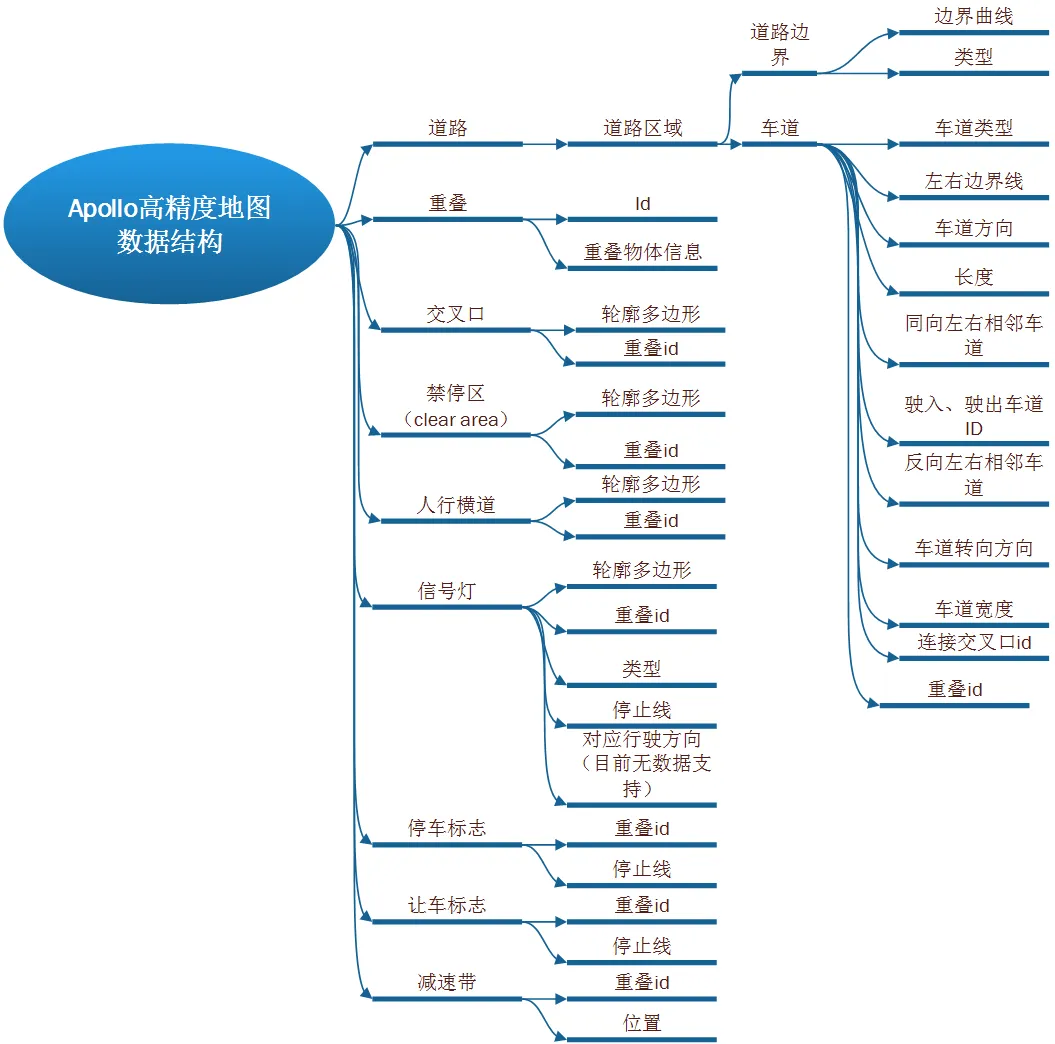
相关数据结构
- PointENU位于modules/common/proto/geometry.proto,描述了地图上的一个点。
- SLPoint位于 modules/common/proto/pnc_point.proto,描述了Frenet坐标系上的一个点
LaneWayPoint
- pnc map中的LaneWayPoint:
- 表示地图道路中的一个点
- 包含了道路id,s值,全局坐标信息。
- hd map中的LaneWaypoint:
- 描述了车道上的点
- 位于
modules/map/pnc_map/path.h - 与routing.proto中的LaneWayPoint有一些区别,它是hdmap中直接拿取的道路点,包含道路信息以及s和l信息
// 为路由模块的输入,车辆在全局地图中必须经过的点
// PointENU为东北天坐标系,apollo中被简化为二维横轴墨卡托坐标系
message LaneWaypoint {
optional string id = 1;
optional double s = 2;
optional apollo.common.PointENU pose = 3;
// When the developer selects a point on the dreamview route editing
// the direction can be specified by dragging the mouse
// dreamview calculates the heading based on this to support construct lane way point with heading
optional double heading = 4;
}
RoutingRequest
message RoutingRequest {
...
repeated LaneWaypoint waypoint = 2;
}
RoutingRequest为dreamview上发出的routing请求点,主要关注LaneWaypoint这个数据类型,表示routing算法导航出的路径需要经过这些LaneWaypoint点。
RoutingResponse
RoutingResponse表示的是routing的搜索结果信息,主要由多段RoadSegment组成。

- 它是routing模块输出的结果的数据类型
- 被定义在modules/routing/proto/routing.proto文件中
- 是参考线接收到的数据
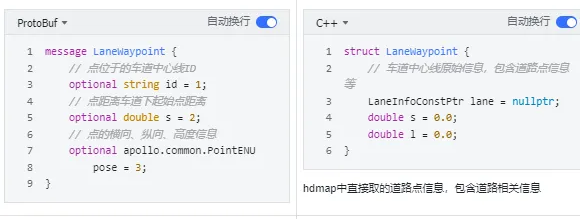
RoadSegment
RoadSegment:
- 描述道路,一条道路可能包含了并行的几条通路。
- 一条道路可能包含多条并行的通路(Passage)
RouteSegments中有如下一些方法值得关注: - NextAction():车辆接下来要采取的动作。可能是直行,左变道,或者右变道。
- CanExit():当前通路是否可以接续到Routing结果的另外一个通路上。
- GetProjection():将一个点投影到当前通路上。返回SLPoint和LaneWaypoint。
- Stitch():缝合另外一个RouteSegments。即:去除两个RouteSegments间重合的多余部分,然后连接起来。
- Shrink():缩短到指定范围。
- IsOnSegment():车辆是否在当前RouteSegments上。
- IsNeighborSegment():当前RouteSegments是否是车辆的临近RouteSegments。
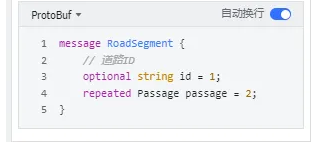
Passage
pnc map中的passage:
- 描述通路,通路是直连不含变道的可行驶区域。
- 一个通路可能包含了前后连接的多个车道(LaneSegment)。
hd map中的RouteSegments:
- RouteSegments可以理解为routing中的passage信息,也是由多段LaneSegment组成
- 它其中会包含若干个车道信息。这个类继承自std::vector< LaneSegment>。
- 在pnc_map中会将routing结果的Passage信息转换为RouteSegments,这两者其实可以看做同一东西。
- RouteSegments这个数据类型非常重要,其包含了pnc_map的主要功能及输出结果,这个类中也有许多对路由段进行处理的函数,为之后更好地生成ReferenceLine做准备
LaneSegment
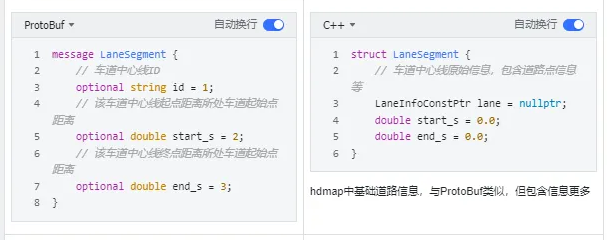
- pnc map中的LaneSegment:
- 描述车道。
- 车道是道路中的一段,自动驾驶车辆会尽可能沿着车道的中心线行驶。
- LaneSegment是最基础的车道数据类型,包含了道路id,起始点,终点
- hd map中的LaneSegment:
- 是hdmap中最基础的道路数据类型,和routing.proto中的LaneSegment类似,但包含了更多的信息。
// 其中id存储的为全局唯一的车道id,即定义在map_lane.proto中的Lane的id
message LaneSegment {
optional string id = 1;
optional double start_s = 2;
optional double end_s = 3;
}
关系
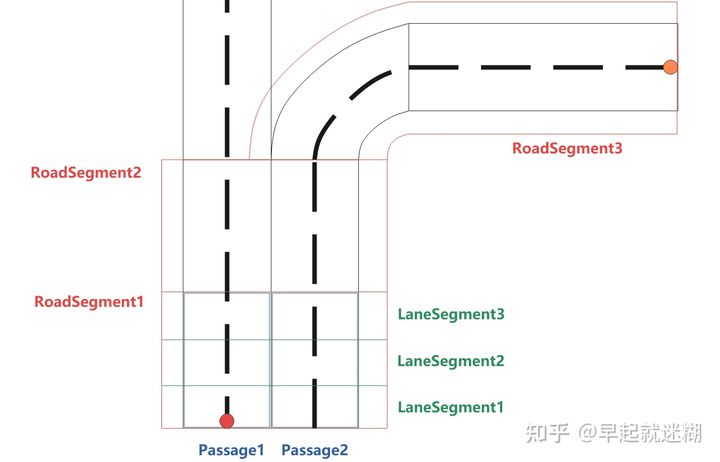
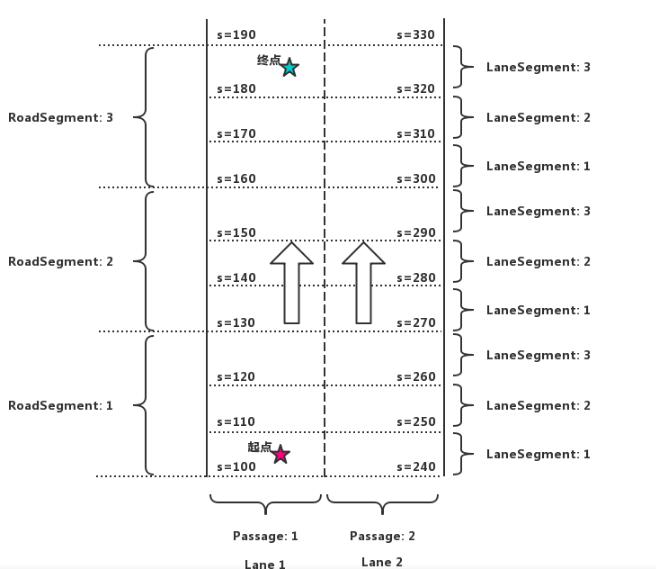
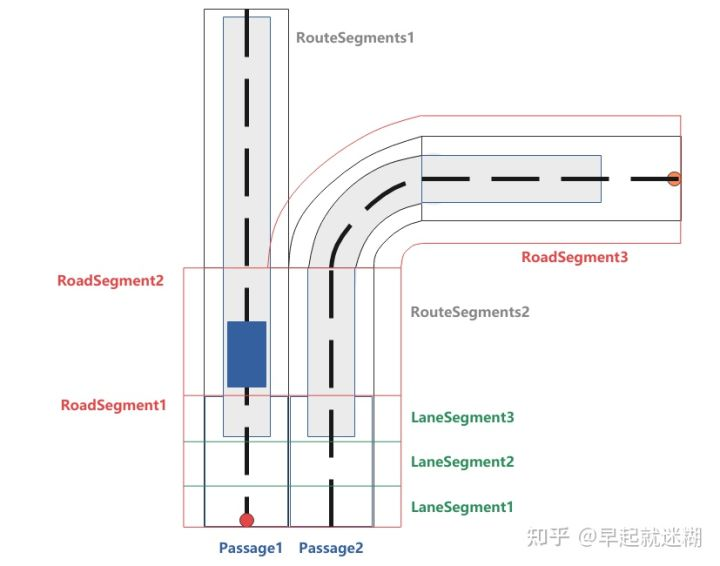
路由模块将道路结构分解为多个RoadSegment,每个RoadSegment又包括多个通道:Passage,每个Passage又由多个LaneSegment组成。
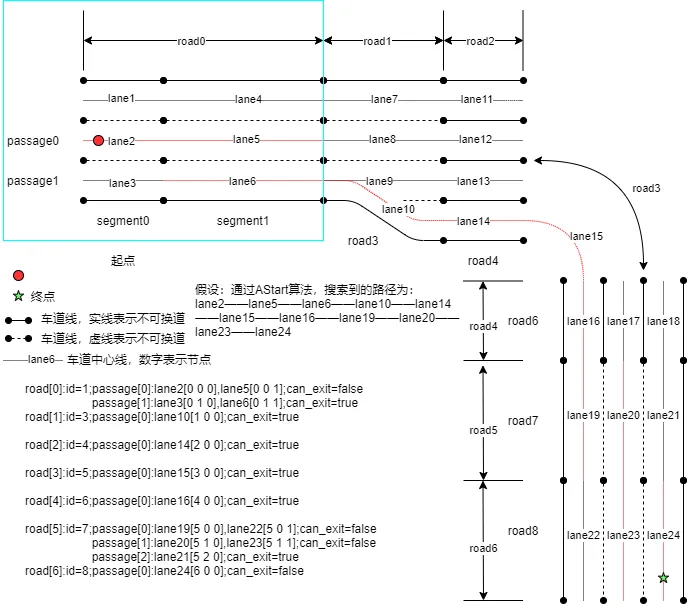
如图所示,为双车道中的一个例子。
- 红色点为Routing起点,橙色为终点。
- 则RoutingResponse中给我们的结果就是RoadSegment1, 2, 3。
- RoadSegment1中包括两个Passage(即每个车道为一个通道),每个Passage又包括三个LaneSegment。
这样做有什么好处呢?
- 当我们为RoadSegment,Passage,LaneSegment编号时,就可以将Routing模块输出的地图道路信息中每个车道中的每个LaneSegment快速的索引出来。如图中(1, 1, 1)代表左下角红圈所在的LaneSegment。
另外需要注意的是Passage中的两个属性: - can_exit : 代表能否从当前通道去下一个通道。用于判断将来是否需要变道。例如Passage1中can_exit为false, Passage2中为true。
- change_lane_type : 代表当前通道是直行(FORWARD),左转(LEFT)还是右转(RIGHT)。 图中Passage2为RIGHT, 因为需要右转才能到终点。Passage1为FORWARD。
RoadSegment,Passage,LaneSegment图解如下:
RouteSegments
/**
* @brief class RouteSegments
*
* This class is a representation of the Passage type in routing.proto.
* It is extended from a passage region, but keeps some properties of the
* passage, such as the last end LaneWaypoint of the original passage region
* (route_end_waypoint), whether the passage can lead to another passage in
* routing (can_exit_).
* This class contains the original data that can be used to generate
* hdmap::Path.
**/
class RouteSegments : public std::vector<LaneSegment>
pnc_map的主要步骤
pnc_map封装在reference_line_provider下,主要供其在由routing结果到ReferenceLine的过程中做前期准备,而实现这一功能的主要步骤分为两步:
- 处理routing结果:这部分接收routing模块的路径查询响应,然后进行一定的处理,最后存储到map相关的数据结构,供后继使用
- 指的是PncMap::UpdateRoutingResponse
- 构造RouteSegments结构
- 指的是PncMap::GetRouteSegments()
+目的:根据当前自车的位置,查询自身可以行驶的车道段(Passage && LaneSegment) - 它会即根据第一步转换的routing信息及自车位置,构造route_segment。这个我们从该函数的入参也可以很清晰的看出来。
- 入参:车辆的状态(包含车辆的位置,速度,偏航角,加速度等信息)
- 入参:backward_length和forward_length是路径短生成过程中前向与后向修正距离
- 返回:返回的是短期内(注意是短期内,长期调度不确定因素太多,无法实现)车辆的运动轨迹route_segments
- 指的是PncMap::GetRouteSegments()
bool PncMap::GetRouteSegments(const VehicleState &vehicle_state,
const double backward_length,
const double forward_length,
std::list<RouteSegments> *const route_segments)
在这之后,reference_line_provider 里会将RouteSegments转换为hdmap::Path结构,再转成ReferenceLine结构,继而进行平滑
- 问题:在Prediction障碍物短期运动方案规划中,"短期"是指当前障碍位置到LaneSequence的第一个最近Lanepoint的位置的路段(在LanePoint构建时,每条LaneSequence最多持有20个LanePoint,每两个LanePoint之间的距离为2m),所以Prediction中的短期大致预测在2m这个邻域范围内障碍物的运动轨迹。那么Planning模块对无人车短期的路径查询,"短期"是多少范围或者是什么概念?
- 回答:Planning对主车"短期"路径查询的距离段由函数后向查询距离backward_length和前向查询距离forward_length决定,所以查询的路长为当前主车前后backward_length + forward_length距离的路段。
- 额外补充一下,在指引线提供器中,调用该函数,后向查询距离FLAGs_look_backward_distance默认为30m,前向查询距离取决于主车速度,若速度很大 linear_velocity() * FLAGS_look_forward_time_sec > FLAGS_look_forward_short_distance,其中FLAGS_look_forward_time_sec默认8s,FLAGS_look_forward_short_distance默认150m),前向查询设置为look_forward_long_distance,默认250m;否者速度小时设置为FLAGS_look_forward_short_distance,150m。
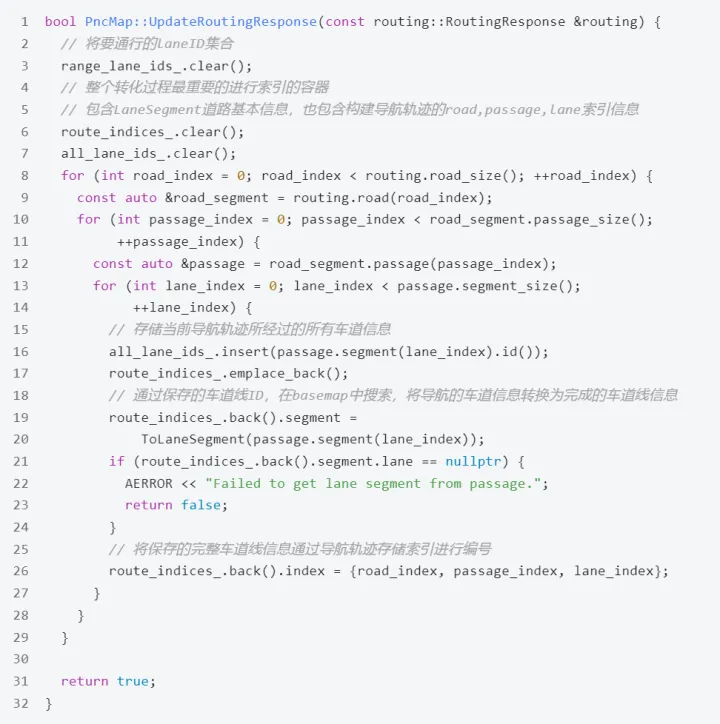
更新routing数据:PncMap::UpdateRoutingResponse()
主要函数为:
bool PncMap::UpdateRoutingResponse(const routing::RoutingResponse &routing)
可以看到,其输入为RoutingResponse成员,即routing模块的输出。
其主要功能为初始化下面加粗的三个pnc_map类成员:
- 在得到RoutingResponse后,该函数为所有的routing::LaneSegment构建了索引列表route_indices_ ,其类型为vector< RouteIndex >。并将索引相对应的LaneSegment类型转换为hdmap::LaneSegment存进RouteIndex。
- 将LaneSegment中的车道的lane_id取出,存入all_lane_ids_,和route_indices_ 中的LaneSegment一一对应。
- 查询起始点和终点在哪段LaneSegment中,存入routing_waypoint_index_。
具体解析如下:
剥离RoutingResponse
首先,每当有新的routing结果时,都需要用最新的RoutingResponse对PncMap里的数据进行更新。
- 用三个for循环分别剥离出routing结果里的road,passage,lane,
- 将每条lane的id存进all_lane_ids这个数组中
- 将每个lane_segment及{road_index, passage_index, lane_index} 存进route_indices_中。
从上述代码可以响应结果剥离工作比较简单,就是对这条完整路径进行RoadSegment,Passage,LaneSegment的存储。举个例子:
图中左上角蓝色方框为一个road的示例,包含road_index,passage_index,lane_index,左下角在生成的RoutingResponse上进行车道线编号。
在举个例子:
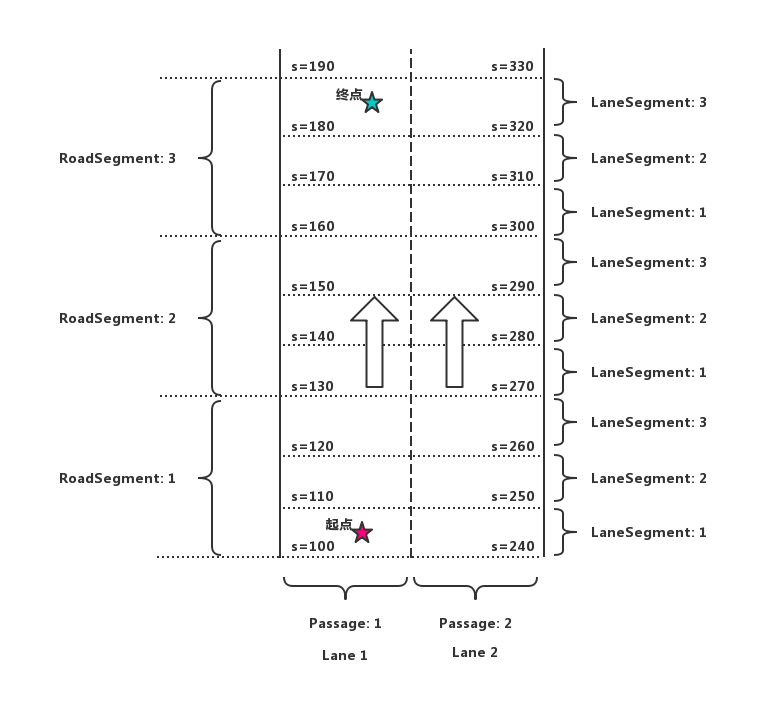
查询点处理
在UpdateRoutingResponse中,第二步是将routing中的request点信息转化后的索引数据中进行匹配,找到具体的LaneSegment信息:
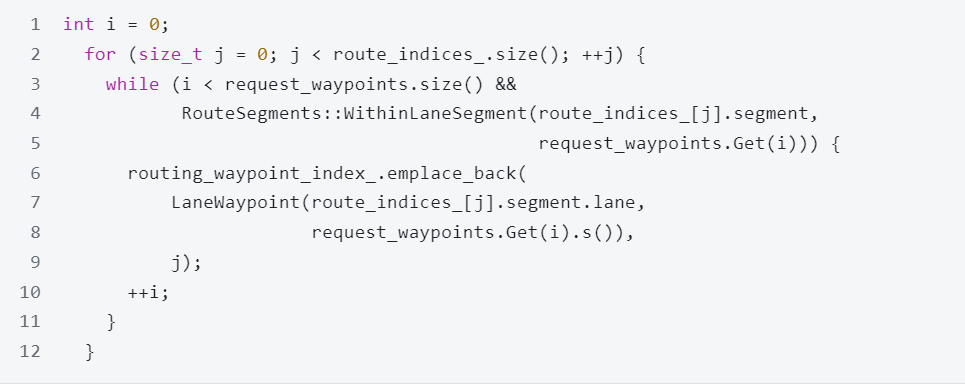
举个例子,上图中,该次查询的查询点waypoint一共两个,起点(红色星星)和终点(蓝色星星)。这一步需要对这两个waypoint进行处理,计算这两个waypoint分别在上述的那些LaneSegment中,准确的说是上述all_lane_ids_中每个LaneSegment包含有哪些waypoint。
我们来看下WithinLaneSegment是怎么实现的。
/// file in apollo/modules/map/pnc_map/route_segments.cc
bool RouteSegments::WithinLaneSegment(const LaneSegment &lane_segment, const routing::LaneWaypoint &waypoint) {
return lane_segment.lane && lane_segment.lane->id().id() == waypoint.id() &&
lane_segment.start_s - kSegmentationEpsilon <= waypoint.s() &&
lane_segment.end_s + kSegmentationEpsilon >= waypoint.s();
}
从代码中可以看到,waypoint在lane_segment中需要满足条件:
- waypoint和lane_segment的所在的车道lane的id必须一致
- waypoint的累计距离s必须在lane_segment的start_s和end_s之间。
最终生成的数据在routing_waypoint_index_
构造RouteSegments:PncMap::GetRouteSegments
该函数为pnc_map的第二个步骤,也是其主要功能,即根据第一步骤转换的routing信息及自车位置来构造route_segments,这个我们从该函数的入参也可以很清晰的看出来。
简单来说,它的作用就是根据车辆当前位置生成短期通道
- 输入为车辆当前位置,前向查找距离,后向查找距离,
- 输出为std::list< RouteSegments>,list中每一个RouteSegments代表一条参考线经过的RouteSegments。在apollo中,该list的元素被限制为了最多为两个
/// file in apollo/master/modules/map/pnc_map/pnc_map.cc
PncMap::GetRouteSegments(const VehicleState &vehicle_state,
const double backward_length,
const double forward_length,
std::list<RouteSegments> *const route_segments)
关于输出RouteSegments:
- class RouteSegments : public std::vector< LaneSegment>
- 该类从Passage扩展而来,保留了Passage的某些特征。该类包含了生成hdmap::Path类的原始数据,而Path类又可以用于初始化参考线。
简单来说,我们在这一步主要是生成连接起来的可通行的Passage,从而为生成参考线做准备。
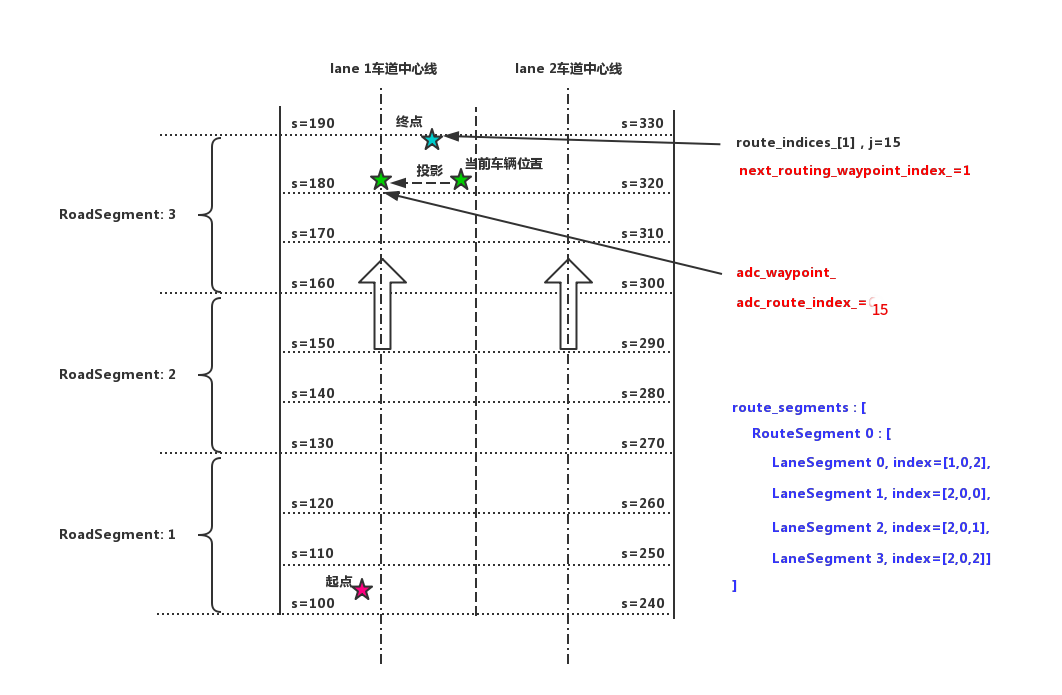
更新pnc map中无人车状态:PncMap::UpdateVehicleState
这里的更新并不是更新车辆的位置,速度等,而是根据传入的车辆状态信息,更新当前所在的LaneSegment位置以及下一必经过点的waypoint位置信息
这部分由UpdateVehicleState函数完成
UpdateVehicleState函数的签名如下:
PncMap::UpdateVehicleState(const VehicleState &vehicle_state)
- 输入为VehicleState类对象,该类被定义在modules/common/vehicle_state/proto/vehicle_state.proto文件中,主要存储自车当前的位置信息,状态信息等。
- VehicleState在这里主要用到了其全局坐标x,y,以及自车航向角heading。
这个函数完成的工作就是计算上图中的红色部分:
- 包括离当前车辆最近的车道adc_waypoint_
- adc_waypoint_所在LaneSegment在route_indices_中的索引adc_route_index_
- 下一个最近查询点在routing_waypoint_index_中的索引next_routing_waypoint_index_。
其主要逻辑根据自车的全局坐标系以及航向角,找到自车在哪一个LaneSegment中,或者说投影后距离那个LaneSegment最近,输出自车所在LaneSegment对应的index,并计算离自车最近的下一个必经点LaneWaypoint所在的LaneSegment对应的index。
我们来细细分析一下:
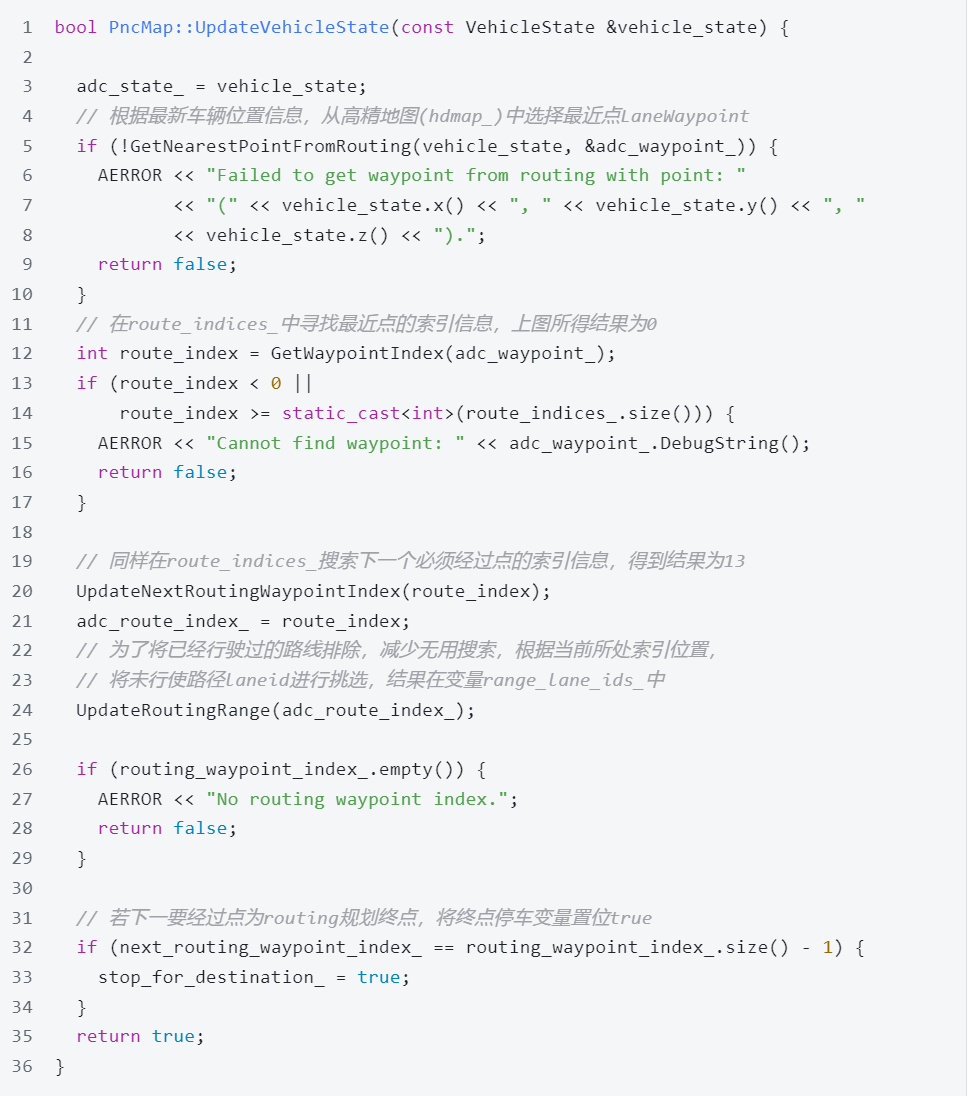
(1)根据自车状态,从routing中查找最近的道路点adc_waypoint_
/// file in apollo/modules/map/pnc_map/pnc_map.cc
bool PncMap::UpdateVehicleState(const VehicleState &vehicle_state) {
// Step 1. 计算当前车辆在对应车道上的投影adc_waypoint_
adc_state_ = vehicle_state;
if (!GetNearestPointFromRouting(vehicle_state, &adc_waypoint_)) {
return false;
}
...
}
GetNearestPointFromRouting的计算流程大致如下:
- 据当前车辆坐标(x,y)以及速度方向heading,去高精地图hd map查询车辆附近的车道(车道方向必须与heading方向夹角在90度以内,意味着都是相同方向的车道,超过90度可能是反向车道)
- 计算查询得到的车道和range_lane_ids_或者all_lane_ids_的交集,也就是查找RoutingResponse.road().passage()中的附近的车道。
- 对2中过滤得到的车道进行车辆坐标投影,可计算车辆到各个车道的距离,去最小距离的车道作为最终的投影车道,得到adc_waypoint_的车道id和累积距离s,其实也可以计算投影点,但是这里没有计算。
(2)计算索引adc_route_index_
- 计算adc_waypoint_对应的adc_route_index_
- 根据adc_waypoint来在route_indices_中查找到当前行驶到了routing哪条LaneSegment上,并将index赋给adc_route_index_
- 对应函数GetWaypointIndex()。其对应逻辑:
- 只要根据adc_waypoint_的车道id和累计距离前向或者后向查询route_indices_,
- 如果某个LaneSegment和adc_waypoint_的车道id一致,并且累计距离s在LaneSegment的[start_s, end_s]区间,
- 就可以得到投影点所在的索引adc_route_index_。
- 计算next_routing_waypoint_index_
(3)计算next_routing_waypoint_index_
- 计算自车下一个必经的waypoint点,并赋给next_routing_waypoint_index_
- 对应函数UpdateNextRoutingWaypointIndex()。其对应逻辑:
- 从当前车辆的索引开始,向后查找最近的查询点waypoint(必须是同一个LaneSegment)
- 从而得到这个查询点所在的LaneSegment索引next_routing_waypoint_index_
/// file in apollo/modules/map/pnc_map/pnc_map.cc
void PncMap::UpdateNextRoutingWaypointIndex(int cur_index) {
// 情况1. 车道倒车,后向查找,下一个查询点waypoint对应的索引查找
// search backwards when the car is driven backward on the route.
while (next_routing_waypoint_index_ != 0 &&
next_routing_waypoint_index_ < routing_waypoint_index_.size() &&
routing_waypoint_index_[next_routing_waypoint_index_].index > cur_index) {
--next_routing_waypoint_index_;
}
while (next_routing_waypoint_index_ != 0 &&
next_routing_waypoint_index_ < routing_waypoint_index_.size() &&
routing_waypoint_index_[next_routing_waypoint_index_].index == cur_index &&
adc_waypoint_.s < routing_waypoint_index_[next_routing_waypoint_index_].waypoint.s) {
--next_routing_waypoint_index_;
}
// 情况2. 车道前进,前向查找,下一个查询点waypoint对应的索引查找
// search forwards
// 第1步,查找最近包含有waypoint的LaneSegment
while (next_routing_waypoint_index_ < routing_waypoint_index_.size() &&
routing_waypoint_index_[next_routing_waypoint_index_].index < cur_index) {
++next_routing_waypoint_index_;
}
// 第2步,查找下一个最近的waypoint对应的索引
while (next_routing_waypoint_index_ < routing_waypoint_index_.size() &&
cur_index == routing_waypoint_index_[next_routing_waypoint_index_].index &&
adc_waypoint_.s >= routing_waypoint_index_[next_routing_waypoint_index_].waypoint.s) {
++next_routing_waypoint_index_;
}
if (next_routing_waypoint_index_ >= routing_waypoint_index_.size()) {
next_routing_waypoint_index_ = routing_waypoint_index_.size() - 1;
}
}
举例1
现在有以下这么个情况:
|-wp0---------------------vp--------|-------wp1-----wp2---------------wp3-----|-------------------------wp4-----|
\ LaneSegment k /\ LaneSegment k+1 /\ LaneSegment k+2 /
其中vp为当前车辆在LaneSegment中的投影,wp0, wp1, wp2, wp3分别是路径查询的4个waypoint(必须经过的点。现在我们要查询车辆下一个最近的必经点waypoint,那么结果应该是wp1!假设车辆当前是前进状态,cur_index值为k,那么:
可以判断,函数执行前,next_routing_waypoint_index_值为0(查询wp0时得到)
第1步,查找最近包含有waypoint的LaneSegment,最终得到的结果next_routing_waypoint_index_仍然为0,因为routing_waypoint_index_[next_routing_waypoint_index_].index就是wp0.index,值为k,与cur_index相等。
第2步,查找下一个最近的waypoint对应的索引,最终的结果next_routing_waypoint_index_变为1,因为adc_waypoint_.s >= wp0.s。
举例2
现在有以下这么个情况(车辆行驶到了LaneSegment k+2,并且已经经过了wp1,wp2和wp3):
|-wp0-------------------------------|----wp1--------wp2---------------wp3-----|-----vp------------------wp4-----|
\ aneSegment k /\ LaneSegment k+1 /\ LaneSegment k+2 /
其中vp为当前车辆在LaneSegment中的投影,wp0, wp1, wp2, wp3分别是路径查询的4个waypoint(必须经过的点),其中wp0,wp1,wp2和wp3已经经过了,wp4待车辆经过。现在我们要查询车辆下一个最近的必经点waypoint,那么结果应该是wp4!假设车辆当前是前进状态,cur_index值为k+2,那么:
可以判断,函数执行前,next_routing_waypoint_index_值为3(查询wp3时得到)
第1步,查找最近包含有waypoint的LaneSegment,最终得到的结果next_routing_waypoint_index_变为4,因为routing_waypoint_index_[next_routing_waypoint_index_].index就是wp3.index,值为k+1,wp3.index < cur_index。
第2步,查找下一个最近的waypoint对应的索引,next_routing_waypoint_index_仍然为4,因为adc_waypoint_.s < wp4.s
(4)到达目的地标志
/// file in apollo/modules/map/pnc_map/pnc_map.cc
bool PncMap::UpdateVehicleState(const VehicleState &vehicle_state) {
// Step 1. 计算当前车辆在对应车道上的投影adc_waypoint_
...
// Step 2. 计算车辆投影点所在LaneSegment在route_indices_`的索引`dc_route_index_`
int last_index = GetWaypointIndex(routing_waypoint_index_.back().waypoint);
if (next_routing_waypoint_index_ == routing_waypoint_index_.size() - 1 ||
(!stop_for_destination_ && last_index == routing_waypoint_index_.back().index)) {
stop_for_destination_ = true;
}
}
如果next_routing_waypoint_index_是终点的索引,表示已经到达目的地。
计算临近通道:PncMap::GetNeighborPassages
根据上一步得到的本车所处index信息,计算出当前车辆在轨迹规划中可能经过的所有相邻车道(passage)信息,作为将要生成的reference_line原始信息:
- adc_waypoint_:
- 在上一步更新车辆状态中设置
- 表示当前车辆在routing中的位置
- road_index:自车所在的road索引
- passage_idx:起始的通道索引。
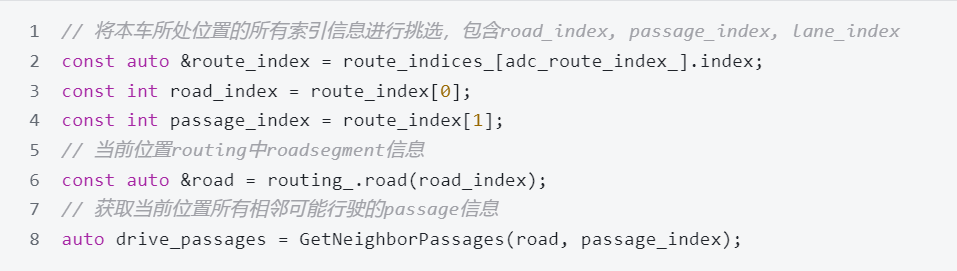
计算相邻可通行区域信息调用的是GetNeighborPassages,其入参:
- 自车所在的RoadSegment
- 通道Passage的id
这里我们简单地总结一下获取邻接可驶入通道的原则:
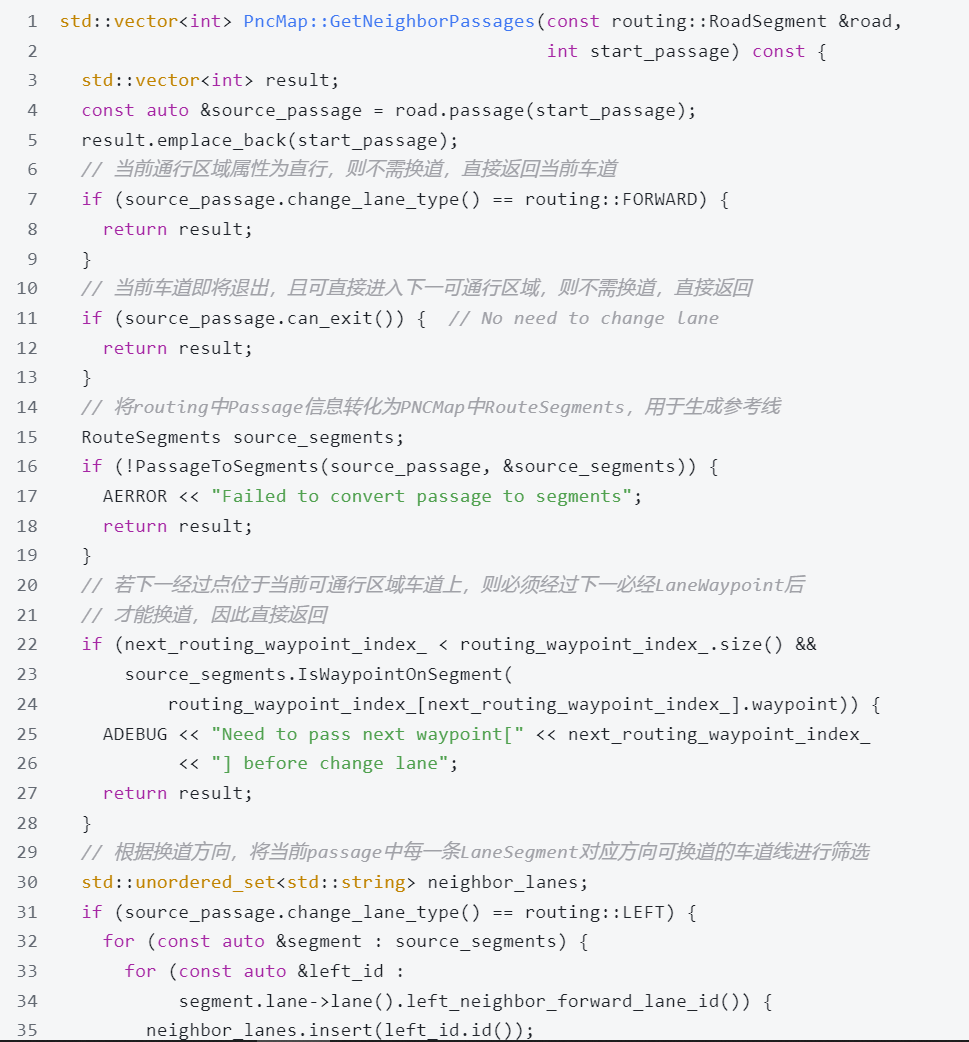
- 如果当前通道(Passage)是直行道,无法变道,那么直接返回车辆所在的车道
if (source_passage.change_lane_type() == routing::FORWARD) {
return result;
}
- 如果当前车道即将退出,则表示即将驶入下一个passage,不需要变道,直接返回车辆所在的车道
if (source_passage.can_exit()) { // no need to change lane
return result;
}
- 如果下一个必经查询点在当前车道上,此时不需要变道,则返回当前车道
RouteSegments source_segments;
if (!PassageToSegments(source_passage, &source_segments)) {
return result;
}
if (next_routing_waypoint_index_ < routing_waypoint_index_.size() &&
source_segments.IsWaypointOnSegment(routing_waypoint_index_[next_routing_waypoint_index_].waypoint)) {
return result;
}
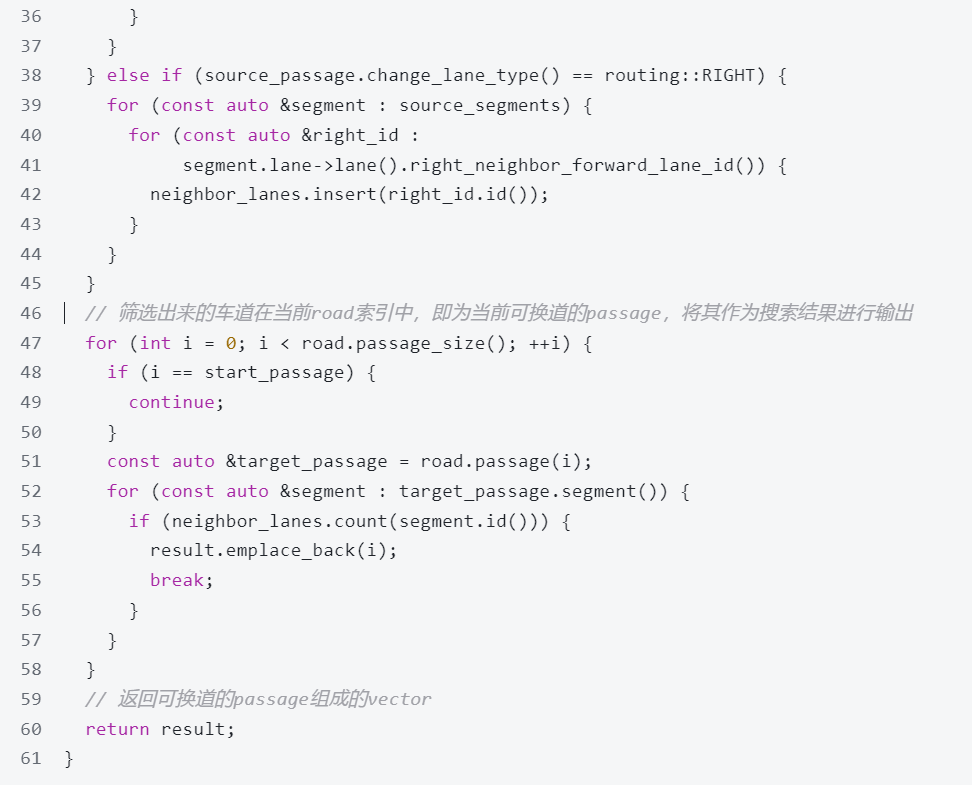
- 如果当前车道为左转或右转车道
- 从高精地图hdmap中查询当前车道对应左侧或者右侧的所有车道
- 如果当前Passage的change_lane_type为RIGHT,则输出为当前RoadSegment中自车右手边全部通道Passage的id,包括自车所在通道。
- 如果当前Passage的change_lane_type为LEFT,则输出为当前RoadSegment中自车左手边全部通道Passage的id,包括自车所在通道。
- 然后去和当前RoadSegment.passage()去做对比,找到两者共同包含的车道,就是最终的邻接车道。
- 从高精地图hdmap中查询当前车道对应左侧或者右侧的所有车道
std::unordered_set<std::string> neighbor_lanes;
if (source_passage.change_lane_type() == routing::LEFT) { // 当前passage是左转通道
for (const auto &segment : source_segments) { // 查询当前Passage中每个LaneSegment所在车道的邻接左车道
for (const auto &left_id : segment.lane->lane().left_neighbor_forward_lane_id()) {
neighbor_lanes.insert(left_id.id());
}
}
} else if (source_passage.change_lane_type() == routing::RIGHT) { 当前passage是右转通道
for (const auto &segment : source_segments) { // 查询当前Passage中每个LaneSegment所在车道的邻接右车道
for (const auto &right_id : segment.lane->lane().right_neighbor_forward_lane_id()) {
neighbor_lanes.insert(right_id.id());
}
}
}
for (int i = 0; i < road.passage_size(); ++i) {
if (i == start_passage) {
continue;
}
const auto &target_passage = road.passage(i);
for (const auto &segment : target_passage.segment()) {
if (neighbor_lanes.count(segment.id())) { // 查询当前RoadSegment中所有Passage::LaneSegment的所属车道,有交集就添加到结果中
result.emplace_back(i);
break;
}
}
}
return result;
}
举例来说,蓝色车为自车,则该函数输出Passage1, 2。
若不为双车道,例如右边有Passage3,Passage4,则输出为Passage1,2,3,4。

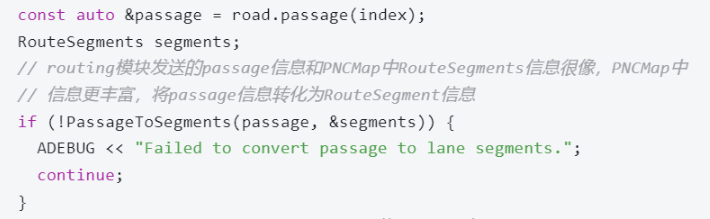
这里需要关注一下PassageToSegments。从下面可以看出,passage表达的数据内容和RouteSegments其实是类似的:RouteSegments就是将Passage中一条条lane,存进其数组中,病记录起始终止的s值
bool PncMap::PassageToSegments(routing::Passage passage,
RouteSegments *segments) const {
CHECK_NOTNULL(segments);
segments->clear();
for (const auto &lane : passage.segment()) {
auto lane_ptr = hdmap_->GetLaneById(hdmap::MakeMapId(lane.id()));
if (!lane_ptr) {
AERROR << "Failed to find lane: " << lane.id();
return false;
}
segments->emplace_back(lane_ptr, std::max(0.0, lane.start_s()),
std::min(lane_ptr->total_length(), lane.end_s()));
}
return !segments->empty();
}
生成list< RouteSegments>:根据相邻passage生成route_segments
遍历上一步输出的所有邻接车道,
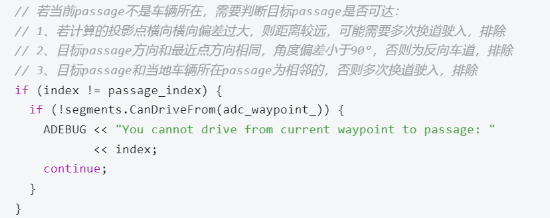
- 先对对每个相邻车道做一个是否可以驶入的检测,如果不可以驶入,那么就排除
- 为什么要做是否可以驶入的检测?因为相邻passage可能是反向的,也有可能相邻比较远(通过连续两个或以上换道才能驶入),所以需要排除。
- CanDriveFrom函数判定依据为:自车能投影到该Passage上,自车距离该Passage横向距离不能超过一条车道的宽度,自车heading应该和该Passage所在车道方向一致等。这些条件导致了最终生成的list最多只有两个RouteSegments!
- 举个例子,如下图,最终生成的list< RouteSegments>可能长这样,图中灰色区域:
- 然后判断是否是自车所在车道
- 若为自车所在通道,根据前向查找距离,后向查找距离生成一条短期通道RouteSegments,存入list< RouteSegments>。
- 若不为自车所在通道,调用CanDriveFrom查看能否从自车位置驶入该通道,若能则将自车投影到该通道并根据前向查找距离,后向查找距离生成一条短期通道RouteSegments,存入list< RouteSegments>。
- 即:也就是制定出无人车在当前情况下可能行驶的区域,每个可行驶通道将划分出一个道路区间,道路区间的长度由前向查询距离forward_length和后向查询距离backward_length决定,短期内规划的可行驶道路段长度为forward_length+backward_length。最终的路由段RouteSegments生成只需要对每个邻接可驶入的通道进行Segments生成即可。
// Step 1. update vehicle state
// Step 2. compute neighbor passages
auto drive_passages = GetNeighborPassages(road, passage_index);
// Step 3. compute route segment
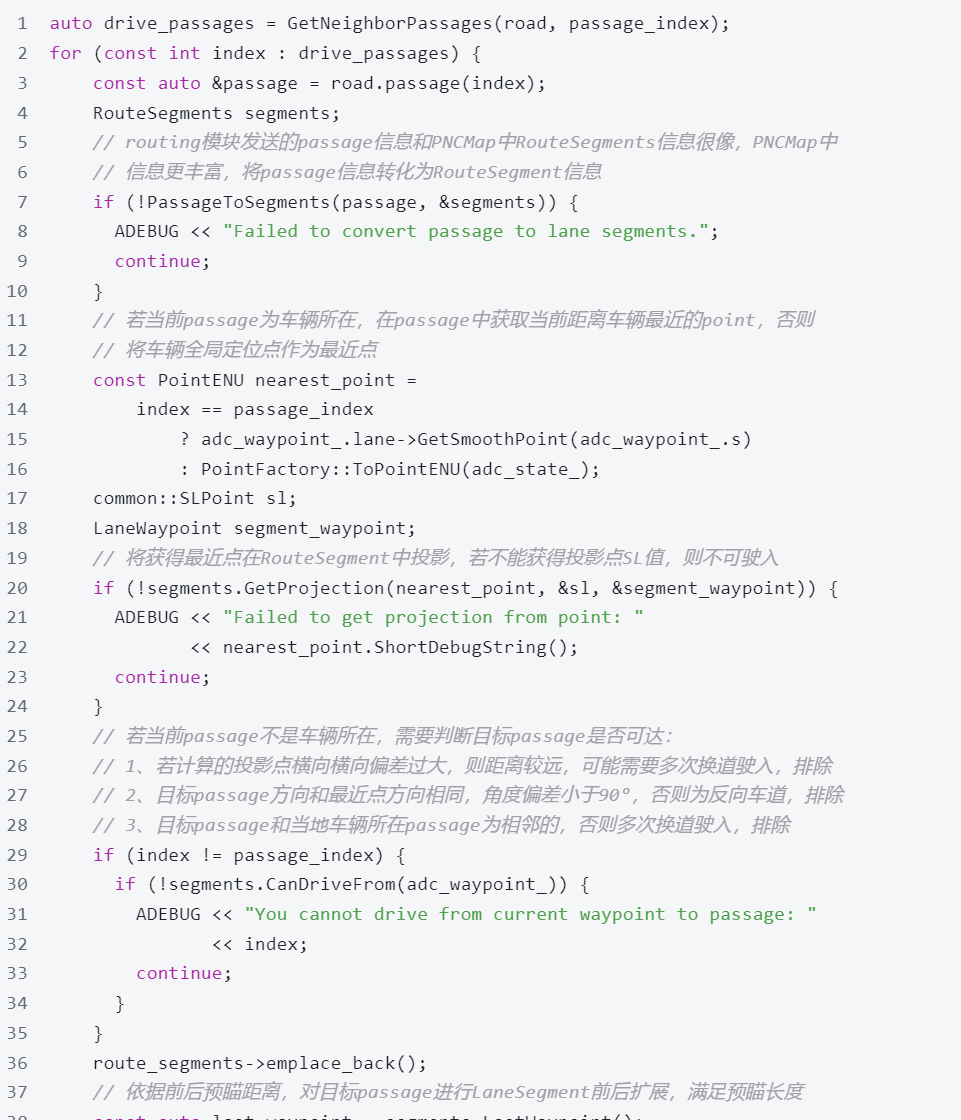
for (const int index : drive_passages) {
...
}
Passage生成对应的RouteSegments分为如下步骤,分别为:
- 先将Passage做一定的处理
-
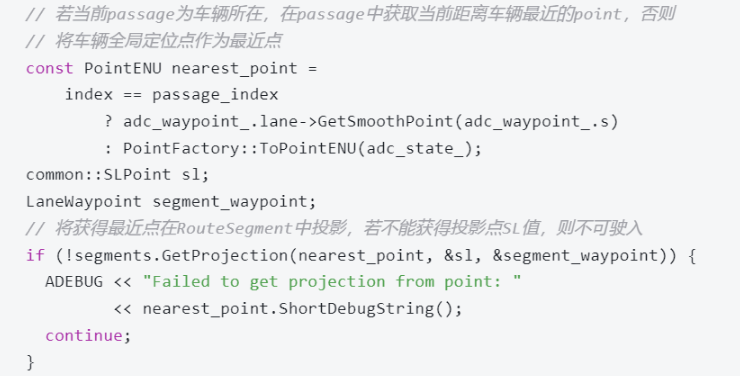
将当前车辆的坐标投影到Passage
-
检查Passage是否可驶入:就是检查临界车道是否可以驶入
-
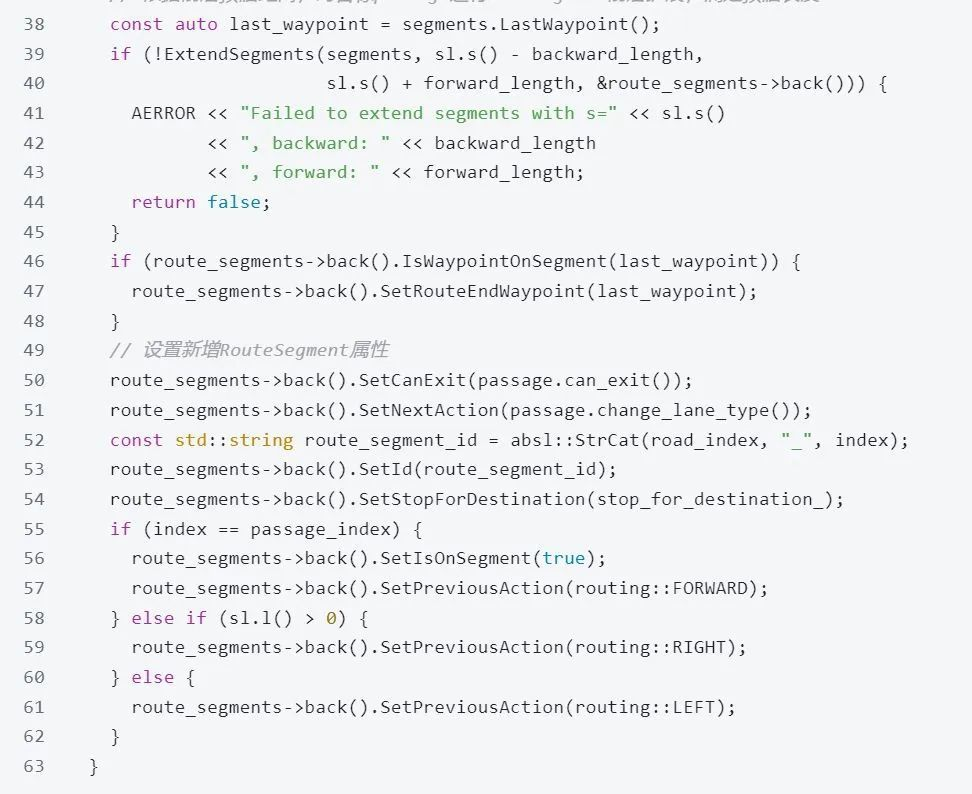
生成RouteSegmens:使用上面合法的passage生成道路段,并且使用backward_length和backward_length前后扩展道路段。
- 最后设置RouteSegments属性:上面我们已经生成了路由段,现在需要对这个路由段添加一些属性
总的如下:
至此,根据每一次车辆位置状态更新值,都可以获得当前车辆位置依据发送RoutingResponse计算得到用于规划控制使用的前后预瞄距离范围内的车道索引,用于生成reference_line。