接着上篇ROS2-QT合并编程,编写基于ROS2-QT的自定义话题消息
1.创建功能包
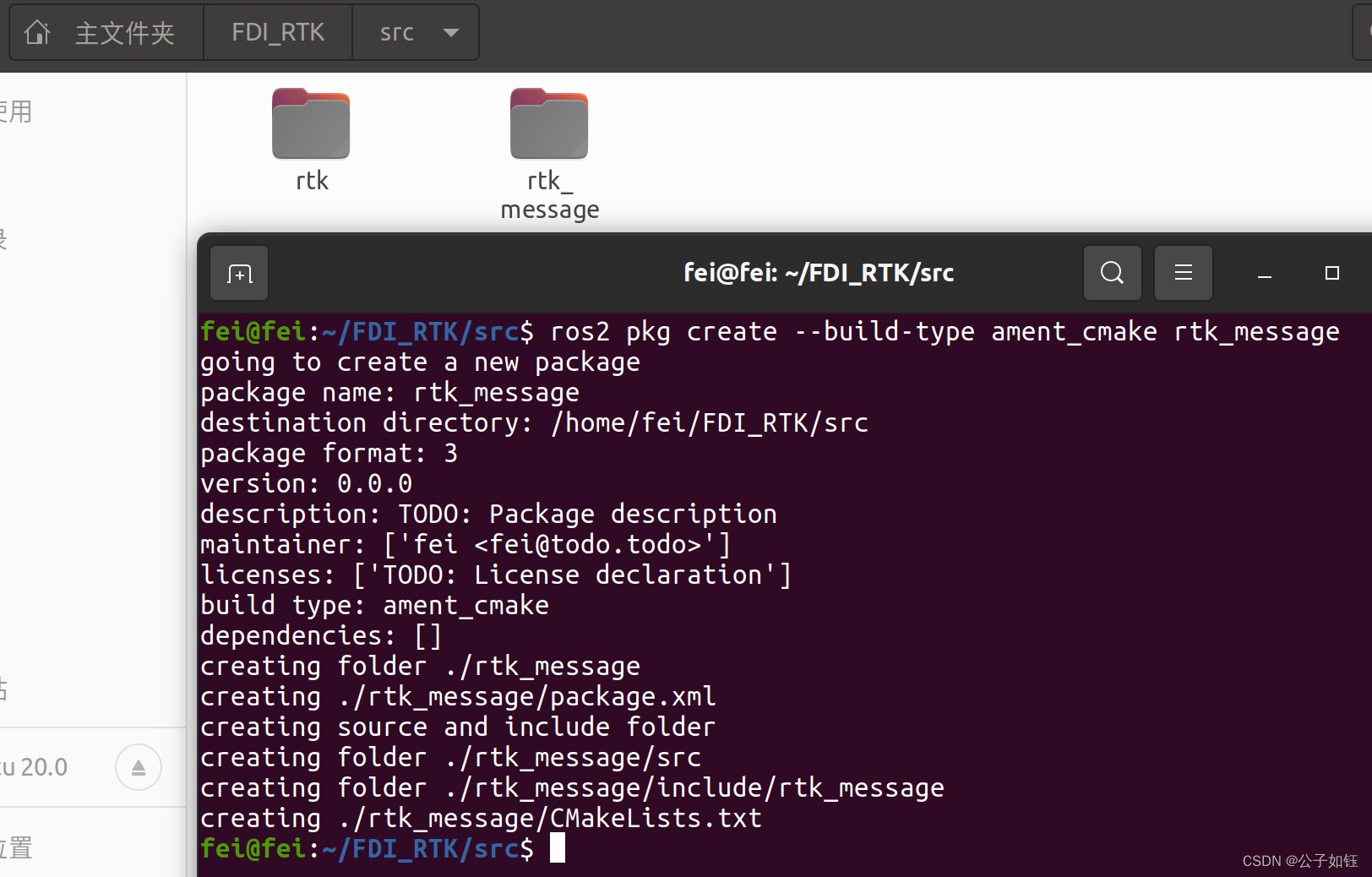
在ros2-QT的FDI_RTK的src中,进入终端,创建新功能包
ros2 pkg create --build-type ament_cmake rtk_message
2.创建.msg
提要:因为只需要自定义.msg来发布话题,所以.srv .action这里不做详细说明,可参考:https://blog.csdn.net/shoufei403/article/details/124789752
如果需要自定义.msg .srv .action,文件最好放置在各自的文件夹中。
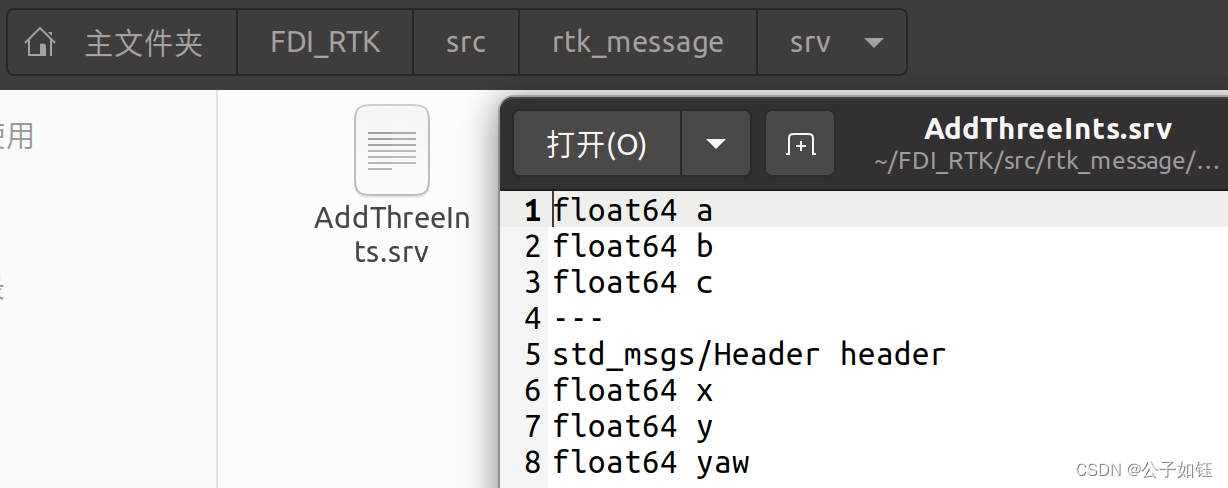
这里,把自定义的.msg或.srv(只是为了参考需求作案例)文件放置在各自的文件夹中,在功能包rtk_message中创建两个文件夹分别保存自定义文件。

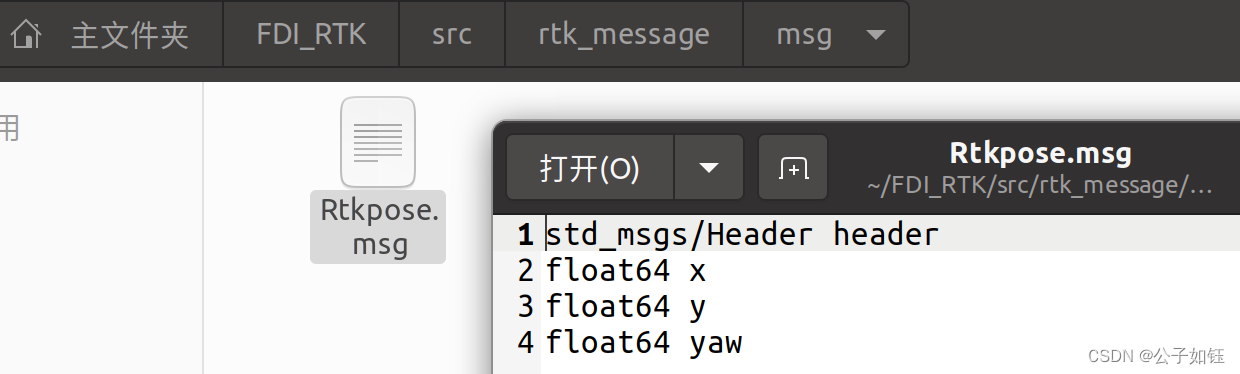
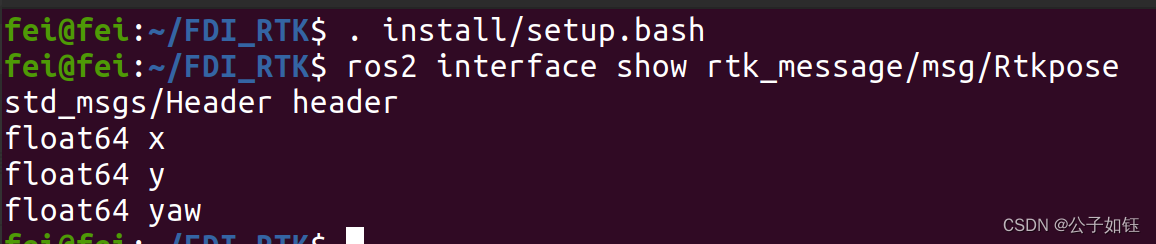
std_msgs/Header header //这里引用了ROS2定义好的时间消息头部
float64 x //定义的变量名称首字母不能大写
float64 y
float64 yaw
3.修改CMakeLists.txt
修改rtk_message中的CMakeLists.txt。
要将定义的接口转换为特定于语言的代码(如C++和Python),以便在这些语言中使用,请在CMakeLists.txt中添加以下行:
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Rtkpose.msg"
"srv/AddThreeInts.srv"
)
如果自定义的文件中没有引用ROS2已定义的消息就如上添加,这里我用到了ROS2定义好的时间消息头部std_msgs,所以如下添加:
find_package(std_msgs REQUIRED)
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Rtkpose.msg"
"srv/AddThreeInts.srv"
DEPENDENCIES std_msgs
)
4.修改package.xml
修改rtk_message中的package.xml。
因为接口依赖于rosidl_default_generators来生成特定于语言的代码,所以需要声明对它的依赖关系。将以下行添加到package.xml:
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
5.编译
在FDI_RTK中进入终端:
colcon build --packages-select rtk_message

6.验证
在FDI_RTK中进入终端,设置环境变量:
. install/setup.bash
使用如下命令,查看刚才自定义的msg接口:
ros2 interface show rtk_message/msg/Rtkpose
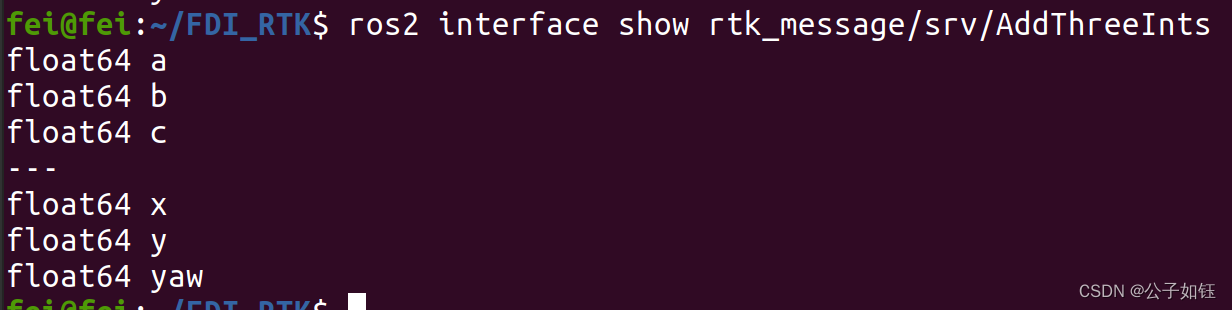
ros2 interface show rtk_message/srv/AddThreeInts
7.测试FDI设备
1)修改CMakeLists.txt
修改FDI_RTK/src/rtk中的CMakeLists.txt,增加:
find_package(std_msgs REQUIRED)
find_package(rtk_message REQUIRED)
ament_target_dependencies(rtk_ahrs rclcpp rtk_message) //也可以把 rtk_message写进已有的ament_target_dependencies()中
2)修改package.xml
修改FDI_RTK/src/rtk中的package.xml,增加:
<depend>std_msgs</depend>
<depend>rtk_message</depend>
3)构建项目,添加话题发布程序
构建整个项目,可能首次会报错,多构建几次就好了。
修改.h文件:
添加引用:#include "rtk_message/msg/rtkpose.hpp"
定义node:rclcpp::Node::SharedPtr nh_;
定义话题及Publisher 指针: std::string rtk_data_topic="/rtk_pose_2d"; rclcpp::Publisher<rtk_message::msg::Rtkpose>::SharedPtr rtk_data_pub_;
修改.cpp文件:
实例化node节点:nh_ = rclcpp::Node::make_shared("ahrs_bringup");
传递:nh_->declare_parameter<std::string>("rtk_data_topic","/rtk_pose_2d");
获取节点内参数到接口类的对象中:nh_->get_parameter("rtk_data_topic", rtk_data_topic);
rtk_data_topic 话题上发布一个类型为 rtk_message::msg::Rtkpose 的消息:rtk_data_pub_ = nh_->create_publisher<rtk_message::msg::Rtkpose>(rtk_data_topic.c_str(), 10);
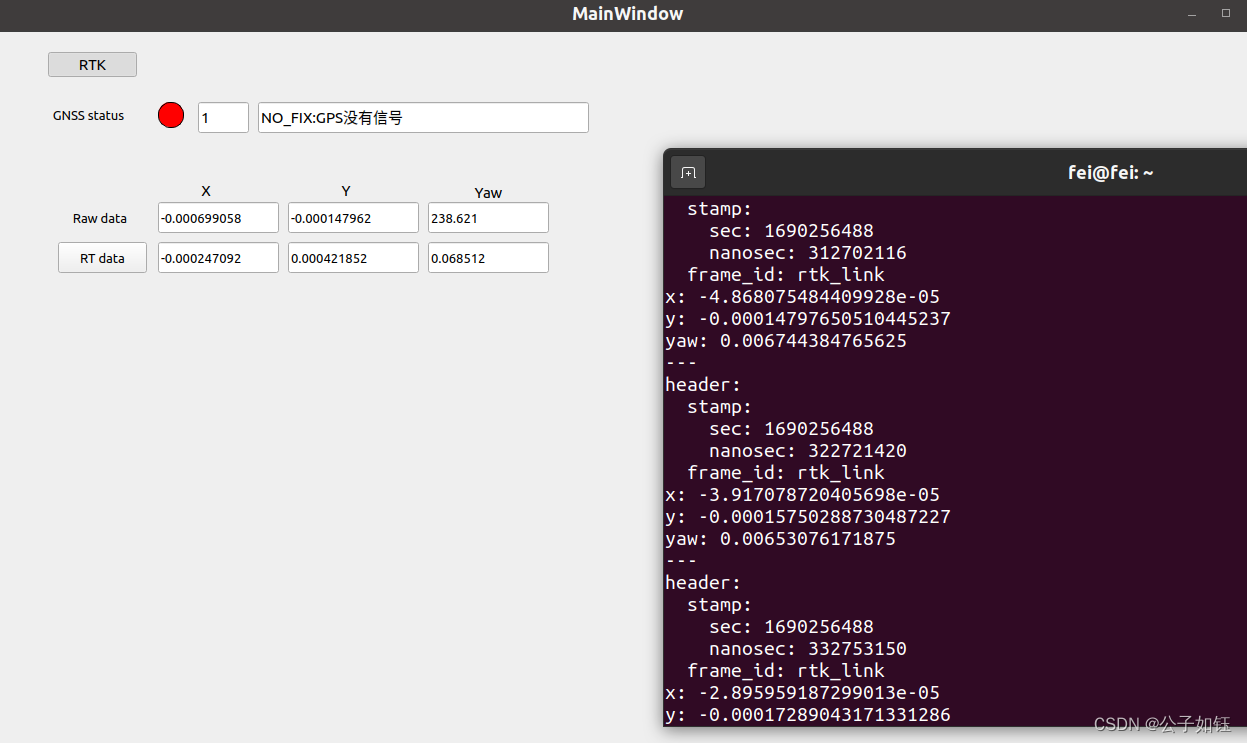
数据:
rtk_message::msg::Rtkpose rtk_data;
rtk_data.header.stamp = nh_->now();
rtk_data.header.frame_id = "rtk_xx";
rtk_data.x = x;
rtk_data.y = y;
rtk_data.yaw = yaw;
rtk_data_pub_->publish(rtk_data);
8.构建运行
构建运行项目: