承接上一篇(控制算法简析4——物理世界与控制工程)。
一旦获得了系统的状态空间或传递函数形式的数学模型,我们便可以分析这些模型来预测系统在时域和频域中的动态响应。通常将控制系统设计为高稳定性,高响应速度,低稳态误差,以及减小振荡。也就是“稳准快”。在本节中,我们将展示如何从系统模型中确定这些动态属性。
时域响应概述
时域响应表示动态系统的状态在受到特定输入时随时间的变化。由于我们得出的模型由微分方程组成,因此必须执行一些积分以确定系统的时域响应,对于某些简单的系统,可以使用闭区间的形式分析解决。但是,对于大多数系统,尤其是非线性系统或需要复杂输入的系统,此积分必须以数字方式进行,幸运的是,MATLAB提供了许多有用的资源来计算多种类型的输入来获得时域响应。
线性动态系统的时域响应由瞬态响应和稳态响应组成,瞬态响应取决于初始条件,稳态响应取决于系统输入,这些分别对应于齐次微分方程的特定解。
频域响应概述
本教程中介绍的所有示例均通过线性常数系数微分方程建模,因此均为线性不变(LTI)。LTI系统具有极其重要的特性,如果系统的输入为正弦波,则稳态输出也将是相同频率的正弦波,但通常具有不同的幅度和相位。这些幅度和相位差表示为频率的函数,即组成了系统的频率响应。
LTI备注:
可以通过以下方式从系统的传递函数中找到系统的频域响应:创建频率向量(从0到无穷大之间变化),并计算在这些频率下的传递函数的值。如果 G ( s ) G(s) G(s) 是系统的开环传递函数,而 ω \omega ω 是频率矢量,则可以绘制 G ( j w ) G(jw) G(jw) 与 ω \omega ω 的关系图。由于 G ( j w ) G(jw) G(jw) 是复数,因此我们可以绘制其幅值和相位(伯德图),也可以绘制其在复平面上的位置(奈奎施特图),两种方法显示相同的信息,但方式不同。
稳定性
出于我们的目的,我们将使用“有界输入有界输出(BIBO)的稳定性定义,该定义指出如果输出对所有输入保持有界,则系统是稳定的。实际上,这意味着系统在运行时不会“发散”。
传递函数表示法在分析系统稳定性时特别有用,如果传递函数的所有极点(分母等于0的
s
s
s 的值)都为负实部,则系统是稳定的。如果任一极点具有正实部,则系统不稳定。如果我们查看复数
s
s
s 平面上的极点,则所有极点都必须在左半平面(LHP)中来确保稳定性。如果在虚轴上有任何一对对偶极点,则系统在一定程度上是稳定的,并且系统将趋于振荡,具有纯虚数极点的系统不被认为是BIBO稳定的,对于这样的系统,将存在无界响应的有界输入。LTI系统模型的极点可以使用“pole”命令,其示例如下所示:
s = tf('s');
G = 1/(s^2+2*s+5)
pole(G) % 计算传递函数的极点
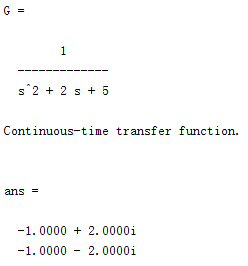
可以看出极点的实部均为负值,因此系统是稳定的。
系统的阶
动态系统的阶是其微分方程的最高导数的阶,同样,它是传递函数分母中 s s s 的最高次幂。一、二阶和高阶系统的重要特性将在下面进行回顾。
一阶系统
一阶系统是最简单的动态系统,一些常见的示例包括质量块阻尼系统和RC电路。
一阶微分方程的一般形式如下:
y ′ + a y = b u y'+ay=bu y′+ay=bu
一阶传递函数的形式是:
G ( s ) = b s + a = k d c τ s + 1 G(s)=\frac{b}{s+a}=\frac{k_{dc}}{\tau s+1} G(s)=s+ab=τs+1kdc
其中参数 k d c k_{dc} kdc 和 τ \tau τ 表征了一阶系统的特征。
零极点:一阶系统只有一个极点,在这种情况下
s
=
−
a
s=-a
s=−a,因此,如果
a
a
a 为正,则系统稳定;如果
a
a
a 为负,则系统不稳定,标准一阶系统没有零点。
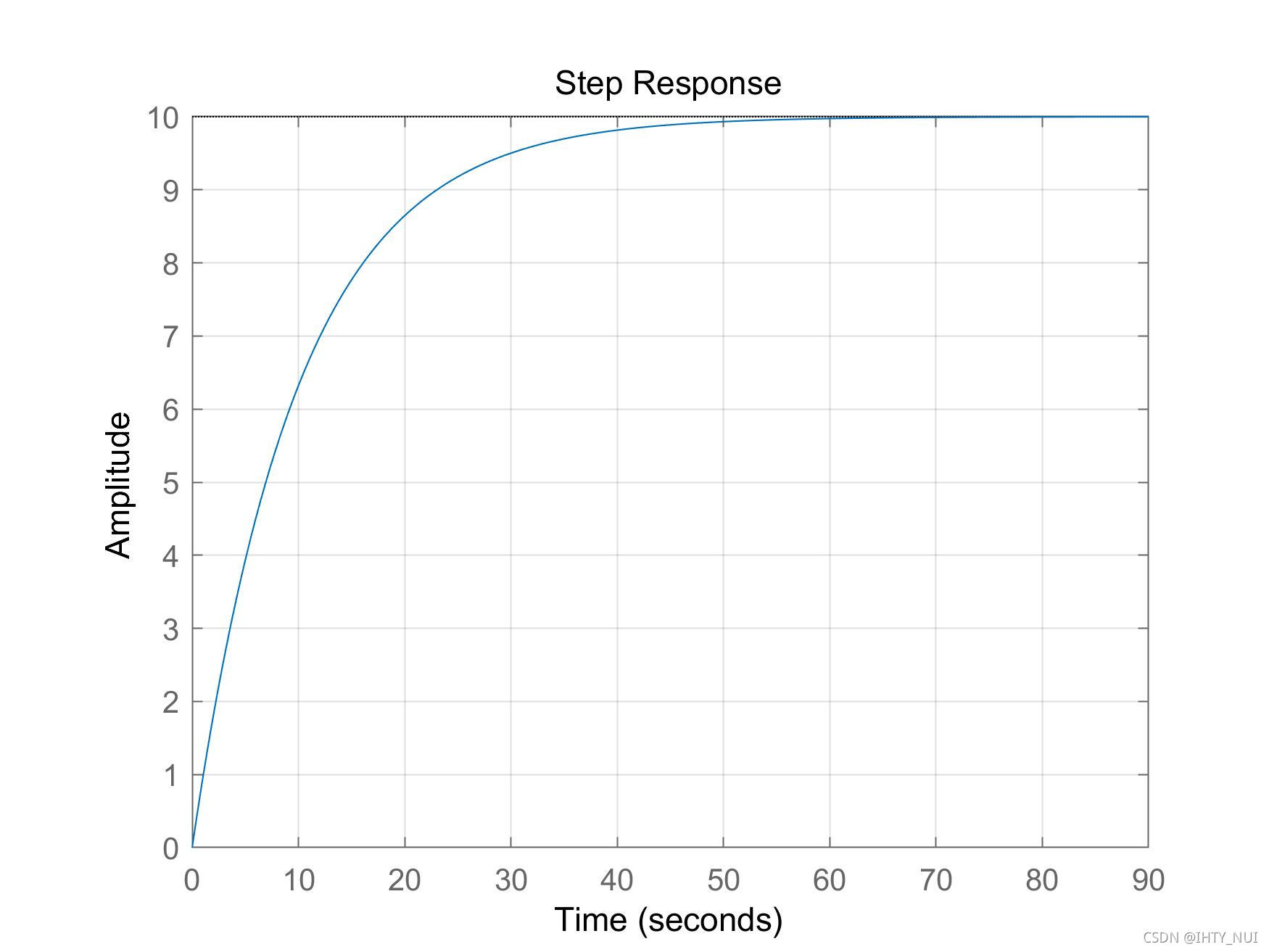
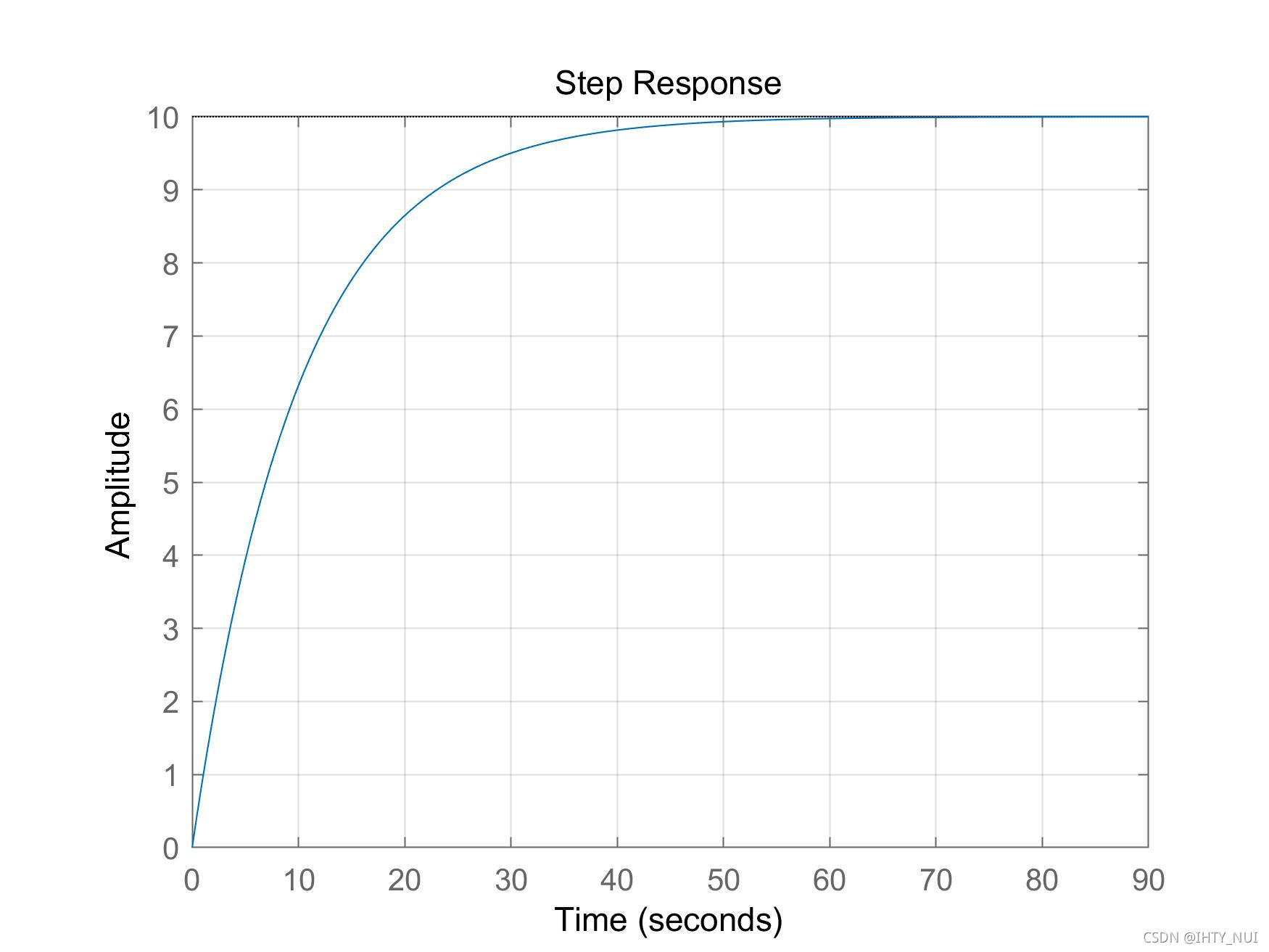
阶跃响应
我们可以使用以下MATLAB命令计算对节约输入u uu的系统时间响应:
k_dc = 5;
Tc = 10;
u = 2;
s = tf('s');
G = k_dc/(Tc*s+1)
step(u*G)
阶跃响应图:
伯德图:
bode(G)
伯德图采用对数频率标度,因此可以看到更大的频率范围。同样,使用对数分贝单位(dB)表示幅度,定义为:
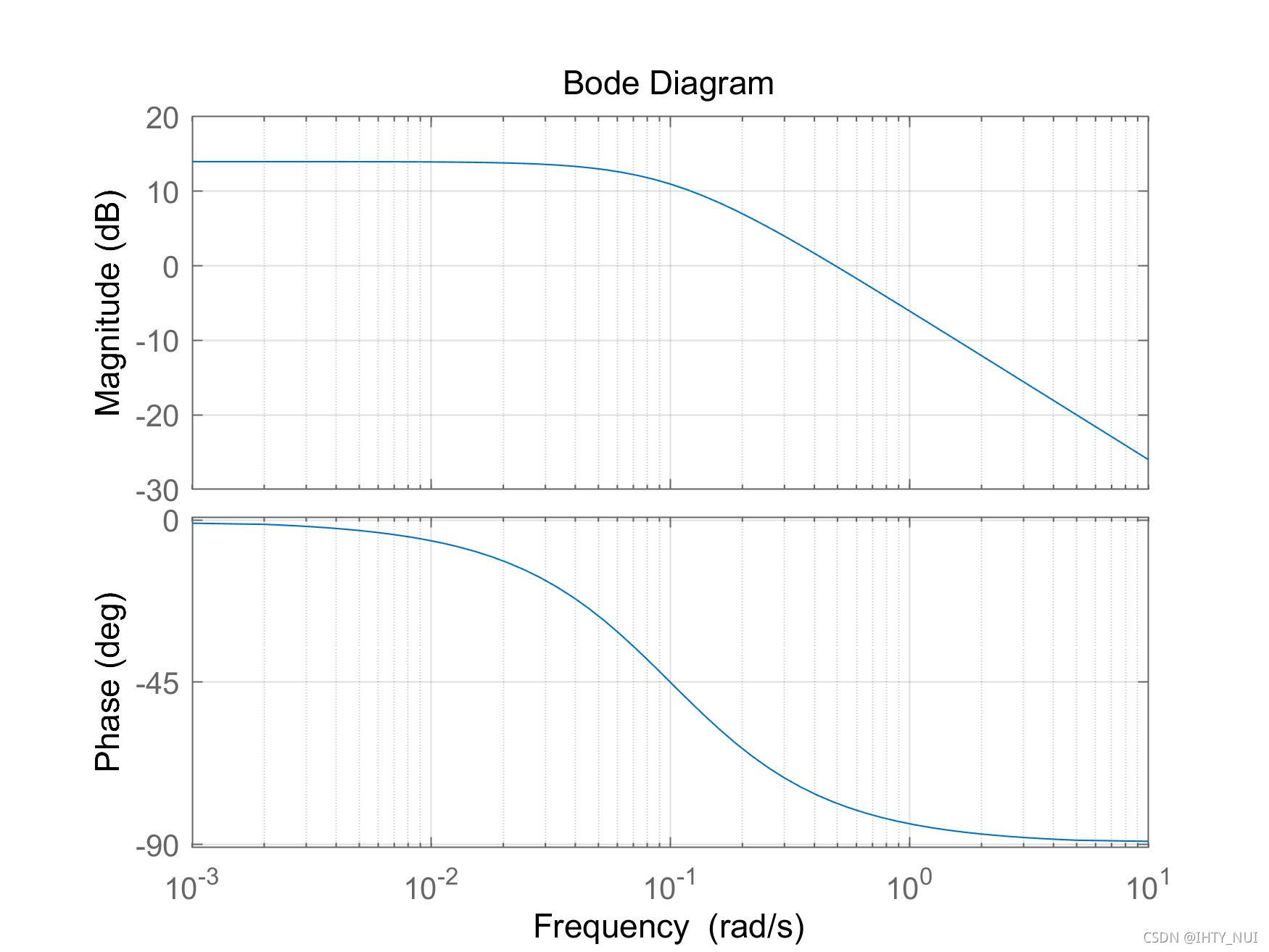
M d B = 20 l o g 10 ( M ) M_{dB}=20log_{10}(M) MdB=20log10(M)
与频率轴一样,分贝标度使我们可以再单个图上查看更大范围的幅度。同样,正如我们将在后续教程中看到的那样,当模块与控制器串联放置时,整个系统的传递函数是各个传递函数的乘积,使用dB标度,整个系统的幅度图就是各个传递函数的幅度图的总和。整个系统的相位图也是各个相位图的总和。
在后续控制器设计的频率方法部分,我们将看到如何使用伯德图来计算闭环稳定性和反馈系统的性能。
二阶系统
二阶系统在实践中经常会遇到,并且是显示振荡的最简单的动态系统类型。例如包括质量块弹簧阻尼器系统和RLC电路,实际上,许多真实的高阶系统可以近似为二阶以便于分析。
二阶微分方程的规范形式如下:
m y ′ ′ + b y ′ + k y = f ( t ) my''+by'+ky=f(t) my′′+by′+ky=f(t)
规范的二阶函数具有以下形式,其中具有两个极点且没有零点。
G ( s ) = 1 m s 2 + b s = k d c w n 2 s 2 + 2 ζ w n s + w n 2 G(s)=\frac{1}{ms^2+bs}=\frac{k_{dc}w^2_n}{s^2+2\zeta w_ns+w^2_n} G(s)=ms2+bs1=s2+2ζwns+wn2kdcwn2
其中, k d c = 1 k k_{dc}=\frac{1}{k} kdc=k1, ζ = b 2 k m \zeta=\frac{b}{2\sqrt{km}} ζ=2kmb, w n = k m w_n=\sqrt{\frac{k}{m}} wn=mk,参数 k d c k_{dc} kdc、 ζ \zeta ζ、 w n w_n wn 表征了典型二阶系统的行为。
零极点
规范的二阶传递函数有两个极点:
s p = − ζ w n ± j w 1 − ζ 2 s_p=-\zeta w_n\pm jw\sqrt{1-\zeta^2} sp=−ζwn±jw1−ζ2
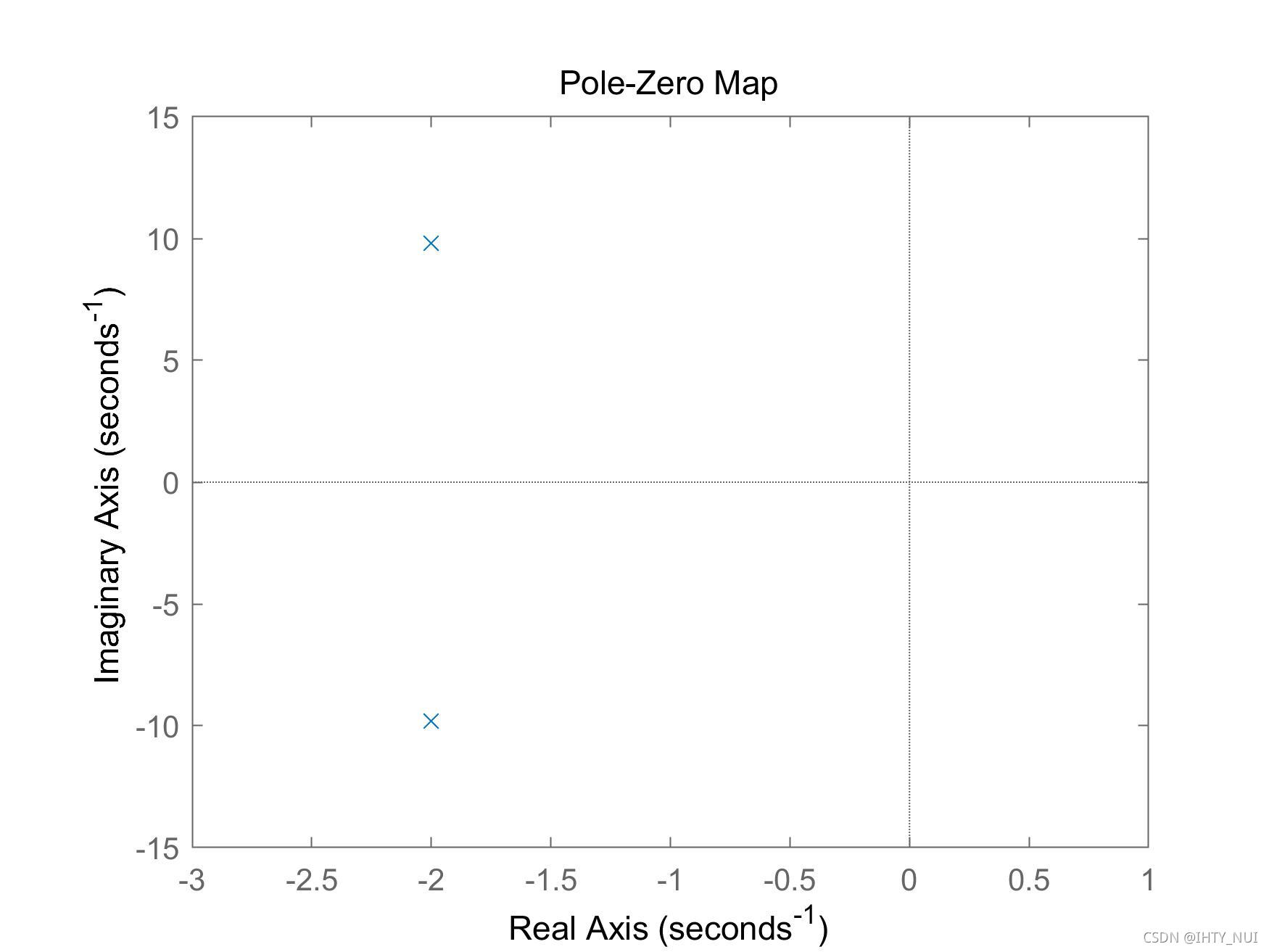
欠阻尼系统
如果
ζ
<
1
\zeta <1
ζ<1,则系统阻尼不足,在这种情况下,两个极点都具有负实数的复值,因此,系统是稳定的,但在接近稳态值时会震荡。
k_dc = 1;
w_n = 10;
zeta = 0.2;
s = tf('s');
G1 = k_dc*w_n^2/(s^2 + 2*zeta*w_n*s + w_n^2);
pzmap(G1)
axis([-3 1 -15 15])
零极点图:
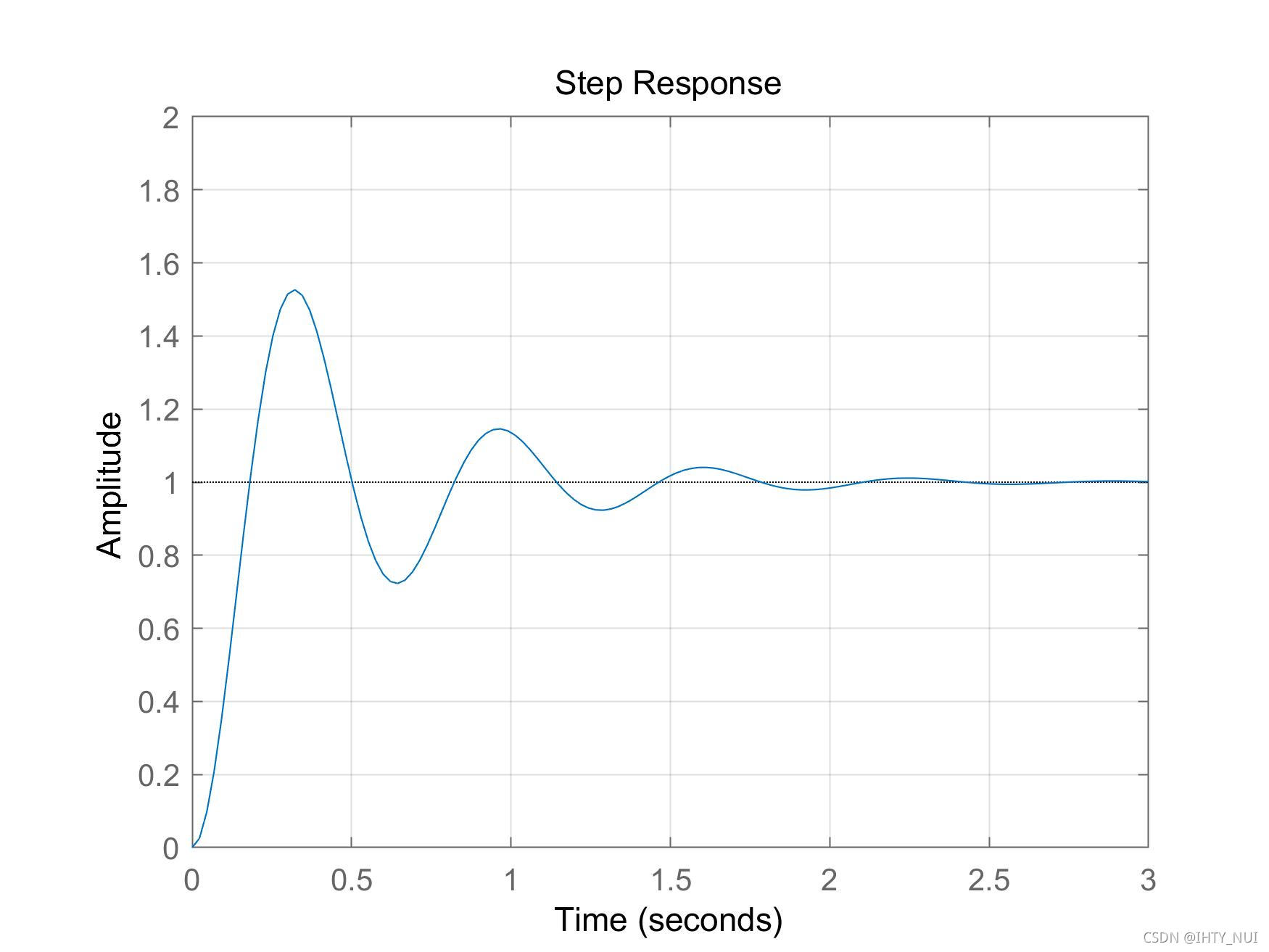
step(G1)
axis([0 3 0 2]) %
阶跃响应图:
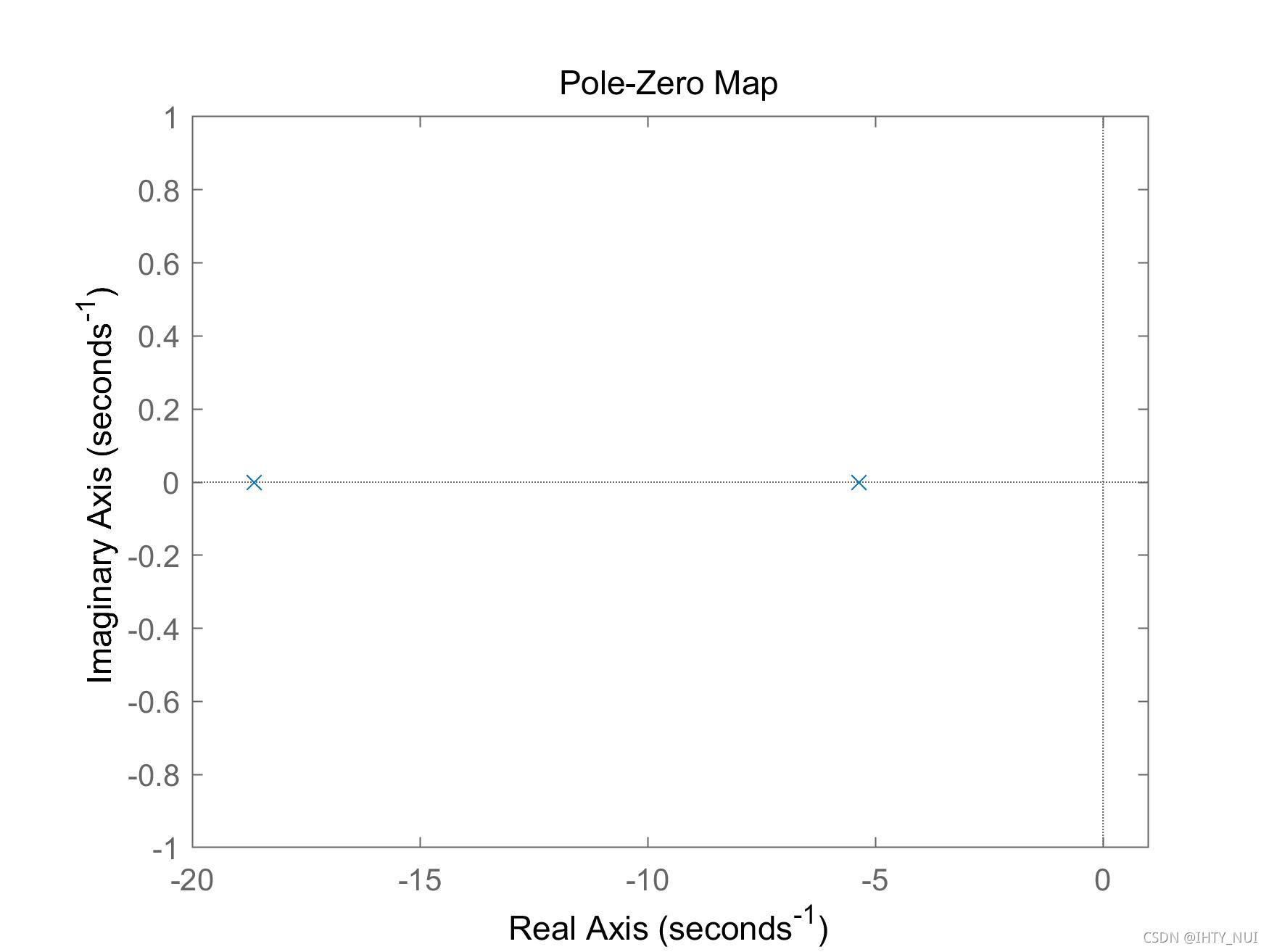
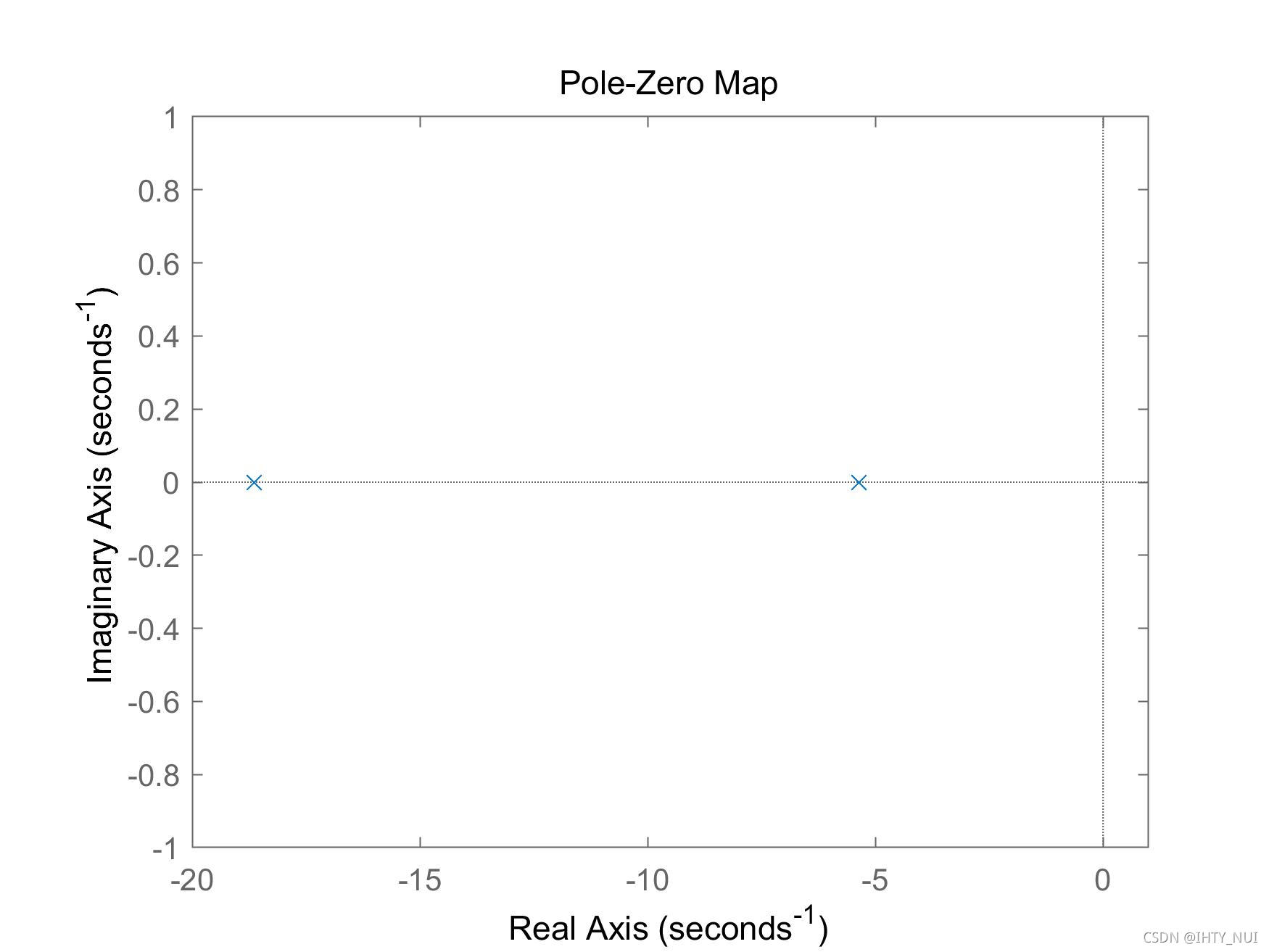
过阻尼系统
如果
ζ
>
1
\zeta >1
ζ>1 ,则系统属于过阻尼系统,两个极点的实部都是负数,因此,系统是稳定的,不会振荡。过阻尼系统的阶跃响应和零极点图如下所示:
zeta = 1.2;
G2 = k_dc*w_n^2/(s^2 + 2*zeta*w_n*s + w_n^2);
pzmap(G2)
axis([-20 1 -1 1])
零极点图:
step(G2)
axis([0 1.5 0 1.5])
阶跃响应图:
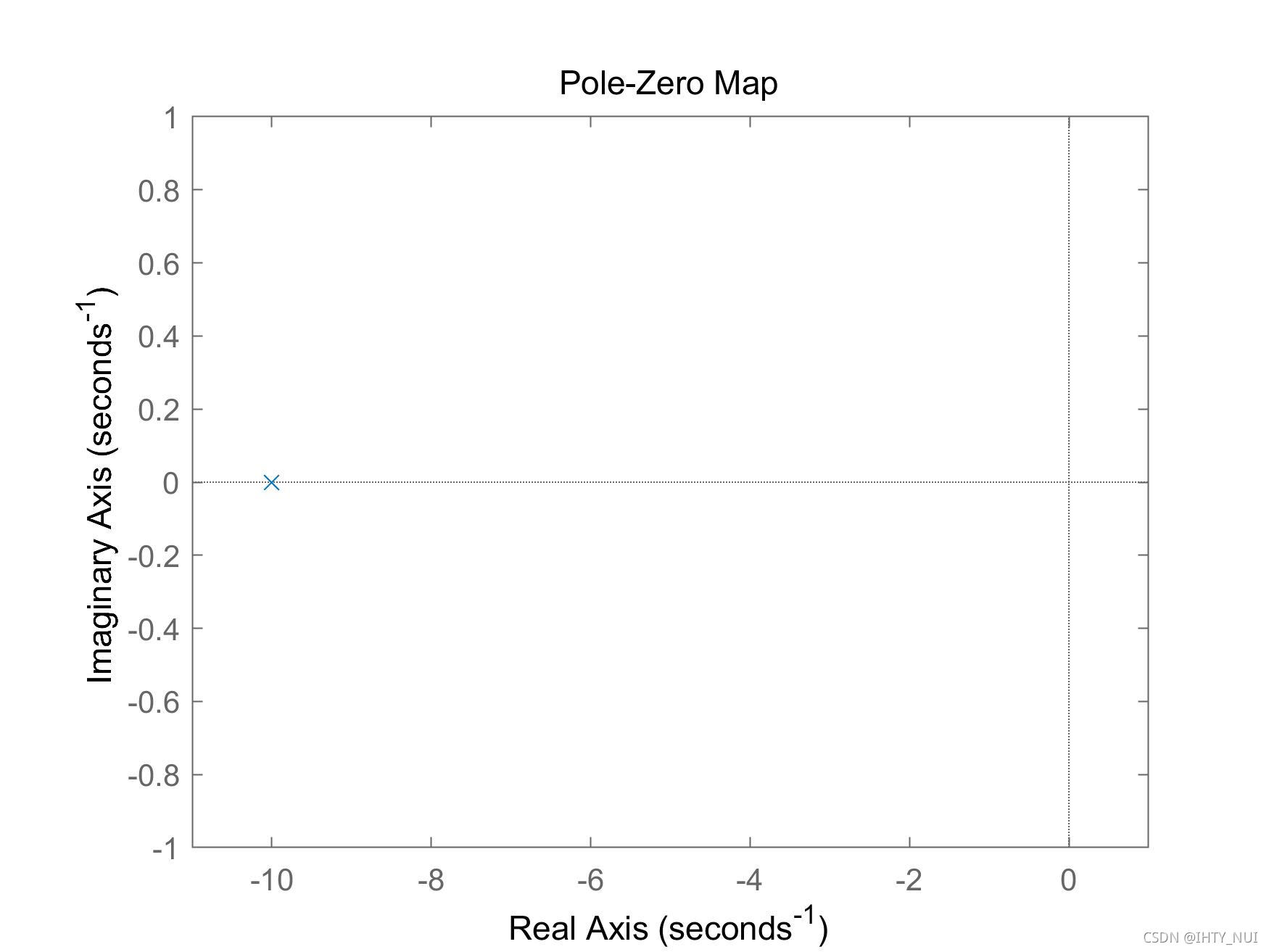
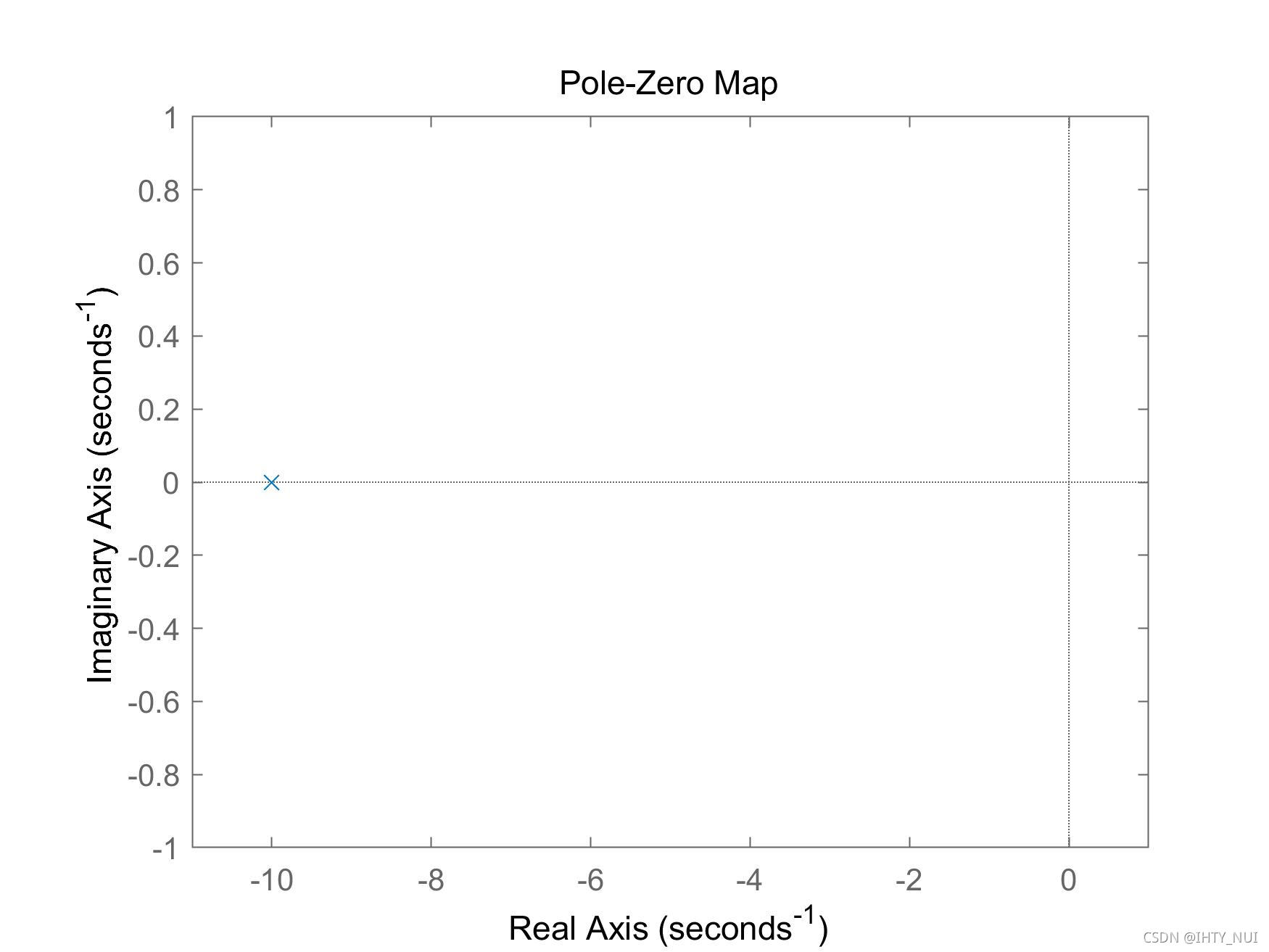
临界阻尼系统
如果
ζ
=
1
\zeta =1
ζ=1 ,则系统是临界阻尼系统,两个极点相等并都在实轴上,对于规范的二阶系统,当系统处在临界阻尼时,可实现最快的建立时间。现在,将阻尼比设置为1,然后重新绘制阶跃响应曲线和零极点图:
zeta = 1;
G3 = k_dc*w_n^2/(s^2 + 2*zeta*w_n*s + w_n^2);
pzmap(G3)
axis([-11 1 -1 1])
零极点图:
step(G3)
axis([0 1.5 0 1.5])
阶跃响应图:
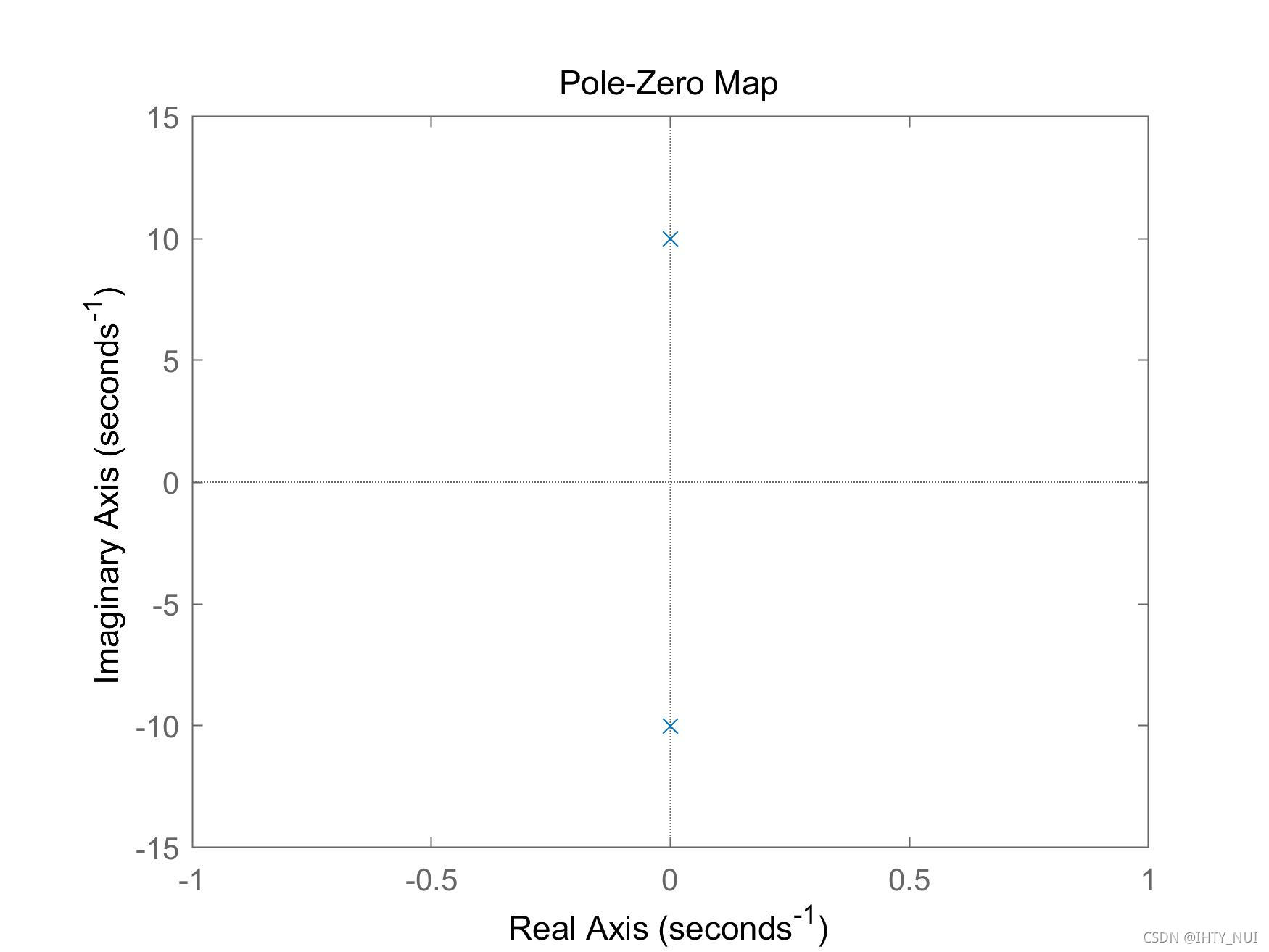
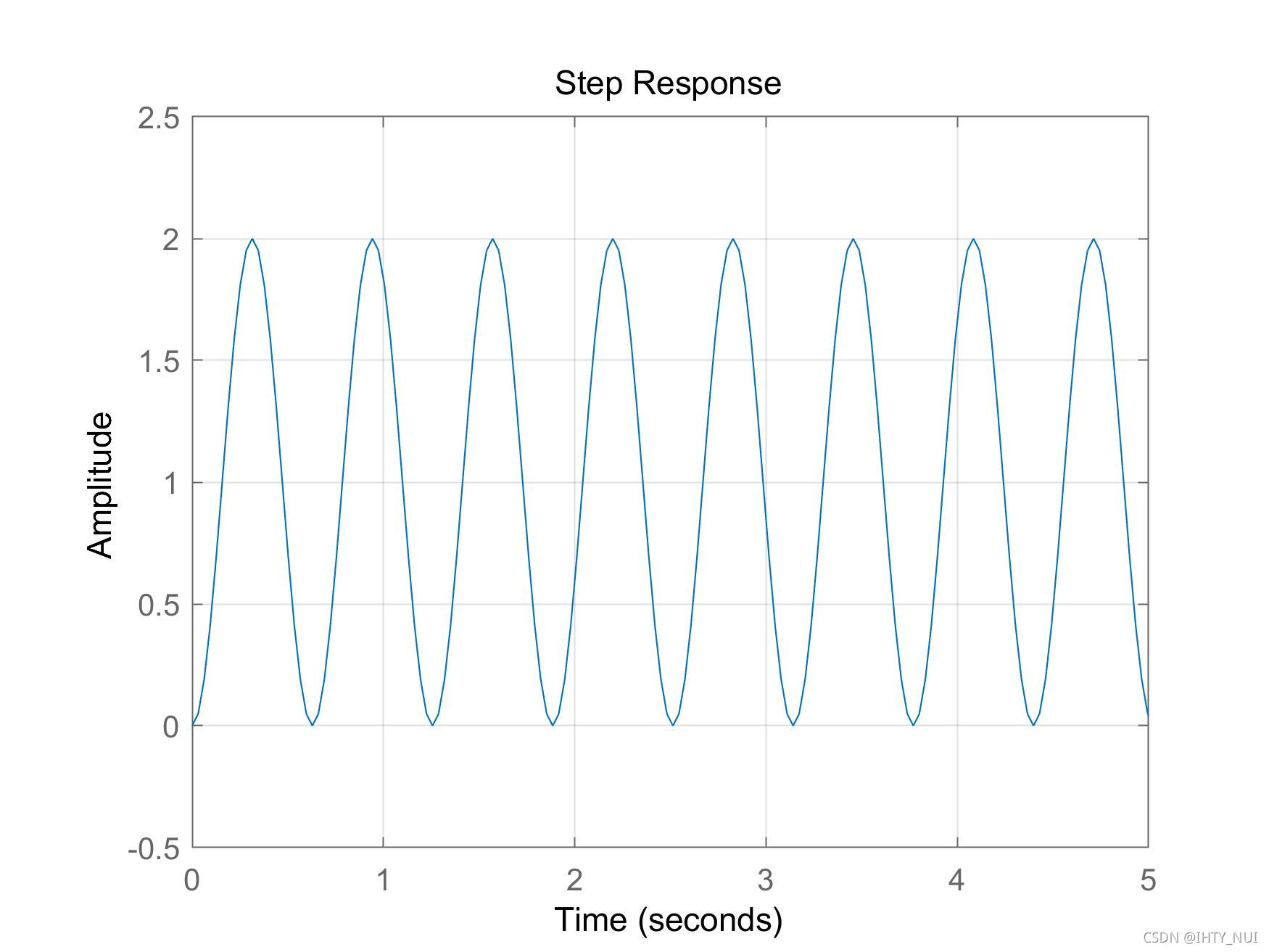
无阻尼系统
如果
ζ
=
0
\zeta =0
ζ=0,则系统是无阻尼系统,在这种情况下,极点都在虚轴上,因此,系统是稳定的,阶跃响应会无限振荡。
zeta = 0;
G4 = k_dc*w_n^2/(s^2 + 2*zeta*w_n*s + w_n^2);
pzmap(G4)
axis([-1 1 -15 15])
零极点图:
step(G4)
axis([0 5 -0.5 2.5])
阶跃响应图:
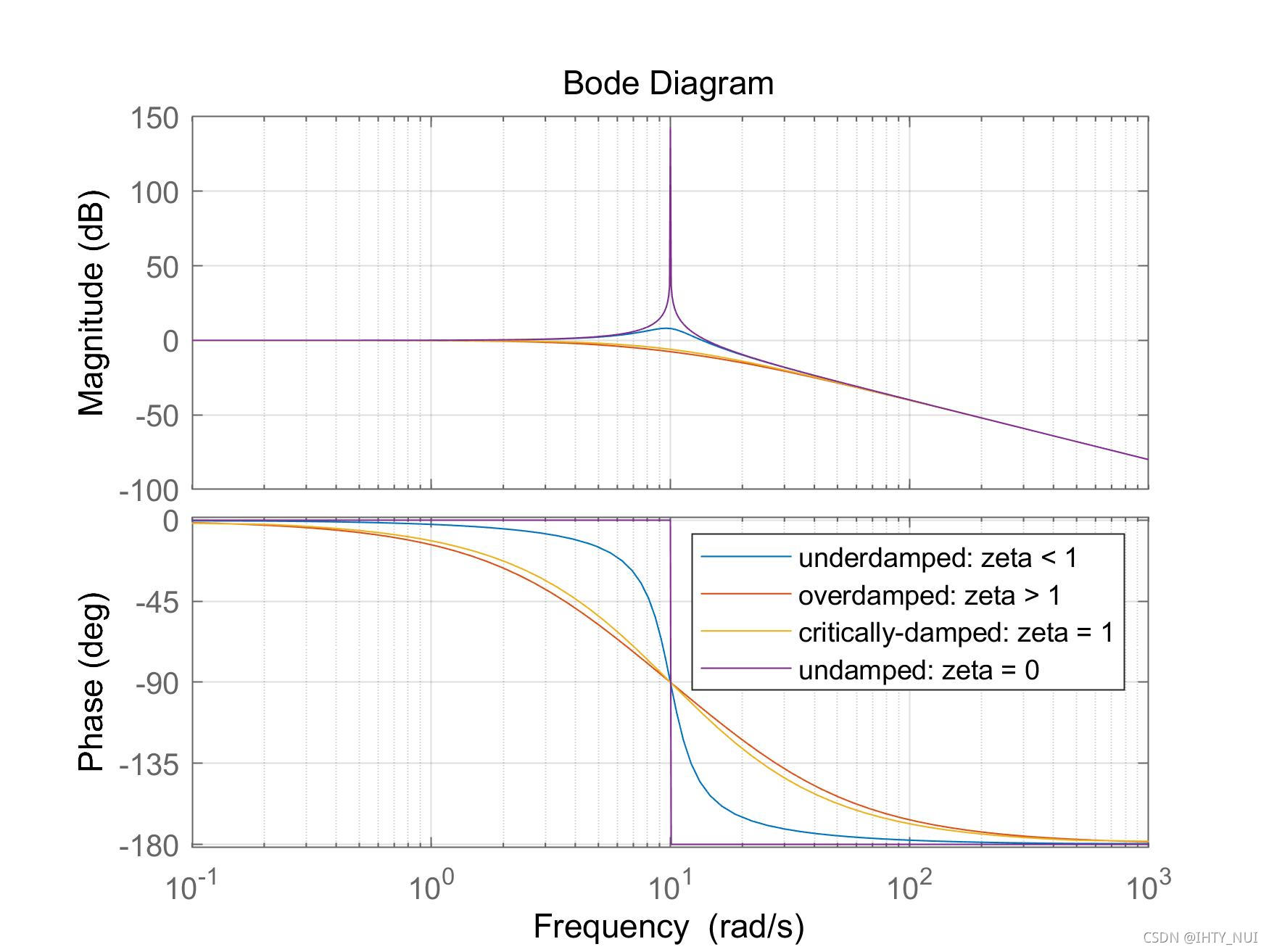
伯德图
我们在下面显示了二阶系统所有阻尼条件的伯德幅值图和相位图:
bode(G1,G2,G3,G4)
legend('underdamped: zeta < 1','overdamped: zeta > 1','critically-damped: zeta = 1','undamped: zeta = 0')
————————————————
版权声明:本文为CSDN博主「浩子_up」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/zh471021698/article/details/105844194