1.数据准备:
本机是Ubuntu18.04,带有2.7和3.6.9两个版本的python,下载的是evo 1.12.0版本,下载地址为GitHub - MichaelGrupp/evo: Python package for the evaluation of odometry and SLAM
我的电脑使用python2.7无法安装,只支持python3.6.9的,因此需要切换版本。
2.设置优先级,数字越大越优先,
sudo update-alternatives --install /usr/bin/python python /usr/bin/python2 2
sudo update-alternatives --install /usr/bin/python python /usr/bin/python3 3然后检查切换是否成功:
输入命令:python --version

3.安装相应的pip3:
sudo apt install python3-pip查看安装之后的版本:
pip3 -V
4.安装依赖
sudo apt-get install tcl-dev tk-dev python3-tk5.安装
最后直接在下载好的源码文件evo-master中输入安装命令:
sudo pip install evo --upgrade --no-binary evo如果出现错误

则取消用户权限 ,直接输入:pip install evo --upgrade --no-binary evo 即可
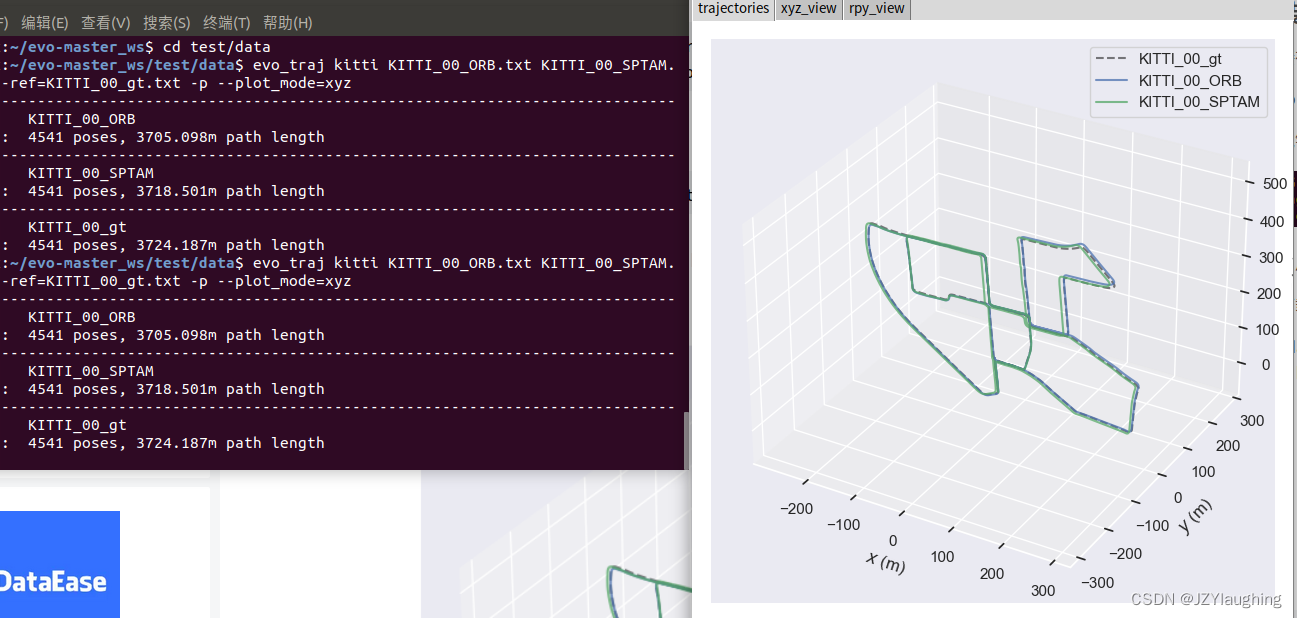
6.测试(下载的文件自带数据包)
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xyz