💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
本算法深度依托于时间差定位(TDOA)的核心原理,其核心在于通过高度精确的测量技术,捕获并分析标签与多个基站间信号到达的时间差异,进而精确计算出标签相对于每对基站之间的距离差。这一步骤为后续的精确定位奠定了坚实的基础。随后,利用从多个基站收集到的丰富测量数据,我们构建出一系列精密的双曲面方程,这些方程在数学上精准地描述了标签可能的空间位置。
为了高效地求解这组复杂的双曲面方程,算法巧妙地采用了经过优化的Stoica-Ingvarsson(SI)算法。该算法以其卓越的求解速度和准确性,能够快速且精确地锁定标签的位置,显著提升了定位过程的效率。
然而,在实际部署与运用过程中,我们不可避免地会遇到诸如设备自身时延误差、信号在复杂环境中传播时产生的多径干扰,以及无处不在的环境噪声等多重挑战,这些因素都可能对定位精度造成不利影响。为了克服这些难题,提升定位的准确性,本算法采取了一系列创新性的策略。
首先,通过引入Taylor级数展开算法,对初步获得的定位结果进行细致的误差修正。这一过程有效地减小了单次定位的误差,为后续步骤提供了更为可靠的起点。在此基础之上,算法进一步融合了卡尔曼滤波算法,这一强大的工具能够对标签的运动轨迹进行平滑处理,并实现动态估计。卡尔曼滤波算法凭借其独特的优势,能够实时地融合来自多个渠道的测量数据与动态模型信息,从而在动态且多变的环境中,显著提升轨迹跟踪的精度与稳定性。
通过这一系列精心的设计与优化,本算法最终实现了在复杂环境下高精度、高可靠性的定位效果,为各类应用场景提供了坚实的技术支撑。
三大定位算法:原理、优势深度剖析
SI 算法:高效定位的智慧之钥
SI(Stoica - Ingvarsson)算法,宛如定位领域一颗璀璨的新星,以其高效性和精准性在定位技术的舞台上独树一帜。它的核心思想如同一场精密的信号交响乐,巧妙地利用多个传感器接收的电磁信号,从而精确计算出目标所在的位置坐标。
想象一下,这些传感器如同忠诚的卫士,分布在不同的战略位置。当目标发射出电磁信号时,它们就会敏锐地记录下信号到达的具体时间。这些记录的时间是解开目标位置之谜的关键线索。SI 算法会对比各个传感器记录的到达时间,进而计算出信号抵达不同传感器的时间差(TDOA)。这些看似简单的 TDOA 值,实则蕴含着目标与传感器之间复杂的几何关系,就像神秘拼图的每一块,等待着算法去拼凑完整。
SI 算法将这些 TDOA 值巧妙地代入双曲面方程组中。这个双曲面方程组,就像是一本数学魔法书,详细描述了目标与传感器之间独特的空间几何关系。算法的关键之处在于,它拥有超凡的智能,能够在满足最小均方差准则的前提下,以闪电般的速度求解这些复杂的方程组。最小均方差准则就像是精准的指南针,确保算法朝着最准确的方向前进,最终得到目标精确的位置信息。
与传统的双曲面方程求解算法相比,SI 算法展现出了强大的优势。它就像一位精明的数学家,通过对计算过程进行深度优化,大幅度提高了方程组的求解速度。这种速度的提升意味着在实际应用中,能够更快地获取目标位置,赢得时间上的先机。同时,它并没有因为追求速度而牺牲精度,依然保持着较高的定位精准度,仿佛在速度与精度之间找到了完美的平衡。
Taylor 级数展开算法:定位精度的迭代攀升之旅
Taylor 级数展开算法是定位技术领域中一位执着的“精度追求者”,它是一种专门用于提高定位精度的迭代算法。在进行定位时,就像一场寻宝之旅,首先需要获得待定位目标的初始估计位置。这一初始位置可以通过其他相对粗略的定位方法得到,它就像是我们在茫茫大海中找到的第一个大致方向,虽然不够精确,但为后续的旅程奠定了基础。
一旦获得初始估计位置,算法便开启了它的迭代之旅。每一次迭代都像是一次自我完善的修行,算法会仔细计算到达时间差测量值的误差。这个误差就像是前进道路上的障碍物,算法会精准地找出它,并求解其局部最小二乘解。这个局部最小二乘解就像是一把神奇的钥匙,用于修正目标的位置坐标。通过不断地修正,使位置估计就像一颗逐渐接近目标的子弹,越来越靠近目标的真实值。 迭代过程就像一场坚持不懈的马拉松,会持续进行下去,直到测量误差小于设定的门限值。这个门限值就像是终点线,标志着算法已经达到了足够的精度。通过这种持续而稳定的迭代,Taylor 级数展开算法能够逐步减小定位误差,最终如同一位高超的工匠,打造出高精度的定位结果。该算法的精妙之处在于其递归性质,它就像一位具有远见卓识的航海家,能够在初始估计位置存在较大误差的复杂海域中,逐步逼近真实位置。这种特性使得它在那些初始定位困难的场景中发挥出了巨大的作用。
Kalman 滤波算法:动态定位的智能守护者
Kalman 滤波算法是基于线性系统状态方程的最优估计算法,如同一位忠诚且睿智的守护者,在动态系统的状态估计领域发挥着至关重要的作用。它的核心思想如同一个智能的信息处理器,通过系统的输入输出观测数据,对系统状态进行实时更新和处理。 在定位领域中,Kalman 滤波算法展现出了独特的魅力。它就像是一个拥有超级预测能力的预言家,能够充分利用目标的动态信息,如速度和加速度,来预测目标的未来位置。同时,它又像一个精细的过滤器,通过滤波过程去除噪声的影响,这些噪声就像是干扰我们视线的迷雾,一旦被去除,就能清晰地看到关于目标位置的准确估计。 Kalman 滤波算法的工作过程分为两个至关重要的步骤:预测和更新。在预测步骤中,算法根据目标的动态模型,就像一位遵循精确地图的导航仪,预测出目标下一时刻的位置。这个预测结果为后续的定位提供了初步的参考。而在更新步骤中,算法会结合新的观测数据,就像一位谨慎的决策者,对预测结果进行修正。这种动态调整的方式,使得 Kalman 滤波算法能够像一只灵活的猎豹,有效应对目标的运动变化。无论目标是加速、减速还是改变方向,它都能及时做出反应,提供连续且准确的轨迹估计,就像为目标的运动轨迹描绘了一条精准的线条,让目标的行踪尽在掌握之中。
基站定位技术的详细流程与优化方法
定义四个基站位置
首先,我们需要明确四个基站的具体位置。这些位置的选择应基于实际环境和预期的覆盖范围。假设这四个基站分别为A,B,C,DA,B,C,D,它们的位置坐标分别为(xA,yA),(xB,yB),(xC,yC),(xD,yD)(xA,yA),(xB,yB),(xC,yC),(xD,yD)。
模拟生成人的轨迹
接下来,我们模拟生成一个人的轨迹。假设该人在二维平面上的运动轨迹可以表示为一系列离散点,每个点具有时间戳和位置坐标。设轨迹点集合为{(t1,(x1,y1)),(t2,(x2,y2)),…,(tn,(xn,yn))}{(t1,(x1,y1)),(t2,(x2,y2)),…,(tn,(xn,yn))},其中titi表示第ii个时间戳,(xi,yi)(xi,yi)表示该时间点的位置坐标。
SI算法获得初始观测值
使用信号强度指示(Signal Strength Indicator, SI)算法,我们可以获得每个轨迹点相对于四个基站的信号强度。这些信号强度值将作为初始观测值,用于后续的定位计算。设信号强度集合为{sA1,sA2,…,sAn}{sA1,sA2,…,sAn},其中sAisAi表示第ii个轨迹点相对于基站AA的信号强度。
Taylor级数展开算法修正位置提高定位精度
通过Taylor级数展开算法,我们可以对初始观测值进行修正,以提高定位精度。具体步骤如下:
- 选择参考点:选择一个参考点,通常选择信号强度最强的基站位置。
- 计算误差函数:构建误差函数e=(xi−xA)+(yi−yA)e=(xi−xA)+(yi−yA),其中(xi,yi)(xi,yi)是轨迹点的实际坐标,(xA,yA)(xA,yA)是参考点的坐标。
- 泰勒展开:对误差函数进行泰勒级数展开,保留到二次项,得到修正后的位置坐标。
Kalman滤波算法再次修正一次位置,使其更加贴近轨迹
为了使位置更加贴近实际轨迹,我们可以使用Kalman滤波算法进行再次修正:
- 状态估计:初始化状态估计值和误差协方差矩阵。
- 预测步骤:利用上一次的状态估计值和系统动态模型,预测当前位置。
- 更新步骤:利用观测值和观测协方差矩阵,更新状态估计值。
计算均方误差
最后,我们计算修正后的位置与实际轨迹点之间的均方误差(Mean Squared Error, MSE)。具体公式为:

画图展示轨迹以及均方误差
为了直观展示定位结果,我们可以将修正后的轨迹点和均方误差绘制在二维平面上。具体步骤如下:
- 绘制轨迹点:使用蓝色圆点表示修正后的轨迹点。
- 绘制均方误差曲线:使用红色曲线表示均方误差随时间的变化情况。
通过以上步骤,我们可以清晰地看到修正后的位置与实际轨迹的接近程度以及定位精度。
在现代的定位技术研究领域中,SI(Space Intersection)算法是一种具有重要价值的定位方法。在SI算法的实际应用和实现过程里,我们深知实际环境要远比理想模型复杂得多,其中环境噪声以及信号传输时延对定位结果的精准度会产生显著影响。为了更为真实地模拟这种现实情况下存在的定位误差,在运用SI算法时,我们人为地给相关数据叠加了符合正态分布的时延以及均方误差。这是因为正态分布能够很好地反映出实际测量中大多数随机误差的统计特性,通过加入这种具有特定分布的误差,使得算法在模拟环境下更贴近实际应用情况。
与此同时,我们在实际环境下对相关参数进行测量时会发现,所测得的数据往往和理论值存在偏差。这是由于实际环境中存在诸如多径效应、信号遮挡、复杂地形等各种干扰因素,导致测量结果的准确性大打折扣。为了尽可能减小这种偏差,提高定位的精确程度,我们可以依据最小均方原则来构建并求解方程。最小均方原则的核心思想是寻求一组最优的参数,使得实际测量值与理论预测值之间的均方误差达到最小。通过求解这样的方程,我们就能够得到相对较为精确的位置信息,让定位结果更接近目标的真实位置。
当我们借助SI算法获得初始位置之后,这个初始的定位结果可能依然存在一定的测量误差,为了进一步提高定位精度,我们会引入Taylor级数展开算法。该算法具有强大的迭代优化能力,我们会利用它进行10次迭代计算。在每一次的迭代过程中,算法都会基于当前已知条件,求出一个局部最小解。这个局部最小解代表了在当前迭代步下,能够使得目标函数值(通常是与定位误差相关的函数)达到最小的位置估计。然而,这个局部最小解仅仅是在当前迭代阶段下的一个临时结果,未必就是全局最优解。所以,我们要对每次求得的局部最小解进行修正,这个修正过程结合了实际测量数据和Taylor级数展开算法的数学特性,通过不断地调整和优化,逐步降低测量误差对定位结果的影响。
经过Taylor级数展开算法的迭代修正之后,定位结果已经有了明显的改善,但仍然可能存在一些残留的噪声干扰。为了进一步提升定位的准确性和稳定性,让最终得到的定位轨迹更为平滑、接近目标的真实运动轨迹,我们会采用Kalman滤波算法。Kalman滤波算法是一种具有最优估计特性的递推算法,它能够根据系统的动态模型和观测数据,对目标的状态进行实时估计和更新。在定位应用中,它可以有效地利用之前时刻的定位信息和当前时刻的测量数据,对当前时刻的位置进行预测和校正,从而进一步滤除实际测量中存在的噪声和随机干扰。通过Kalman滤波算法的处理,我们就能够获得一条更为接近目标真实运动轨迹的定位结果。
最后,为了验证这种结合SI算法、Taylor级数展开算法以及Kalman滤波算法的综合定位方法的实际效果,我们进行了相关的仿真实验。在仿真过程中,我们使用了大量的实际模拟数据,并设置了与实际应用场景相近的环境参数和干扰条件。仿真结果清晰地显示,这种组合算法在模拟环境下的运行效果十分理想。定位结果与目标真实位置之间的误差相对较小,经过严格的误差分析和测量,其定位精度可以达到3cm量级。这一高精度的定位结果充分证明了该算法在实际应用中具有巨大的潜力和优势,能够满足诸如室内精确定位、机器人导航、智能交通等众多对定位精度要求较高的领域的需求。
📚2 运行结果

部分代码:
% Kalman滤波
Xkf=zeros(4,N); %滤波后的最优估计
Xkf(:,1)=X(:,1);%初始化
P0=eye(4);% 误差协方差阵初始化
for i=2:N
%预测方程
Xn=A*Xkf(:,i-1);%状态预测
P1=A*P0*A'+Q;%预测误差协方差
%信息方程
K=P1*G'/(G*P1*G'+R);%Kalman增益
%估计方程
Xkf(:,i)=Xn+K*(TL(:,i)-G*Xn);%状态更新
P0=(eye(4)-K*G)*P1;%滤波误差协方差更新
end
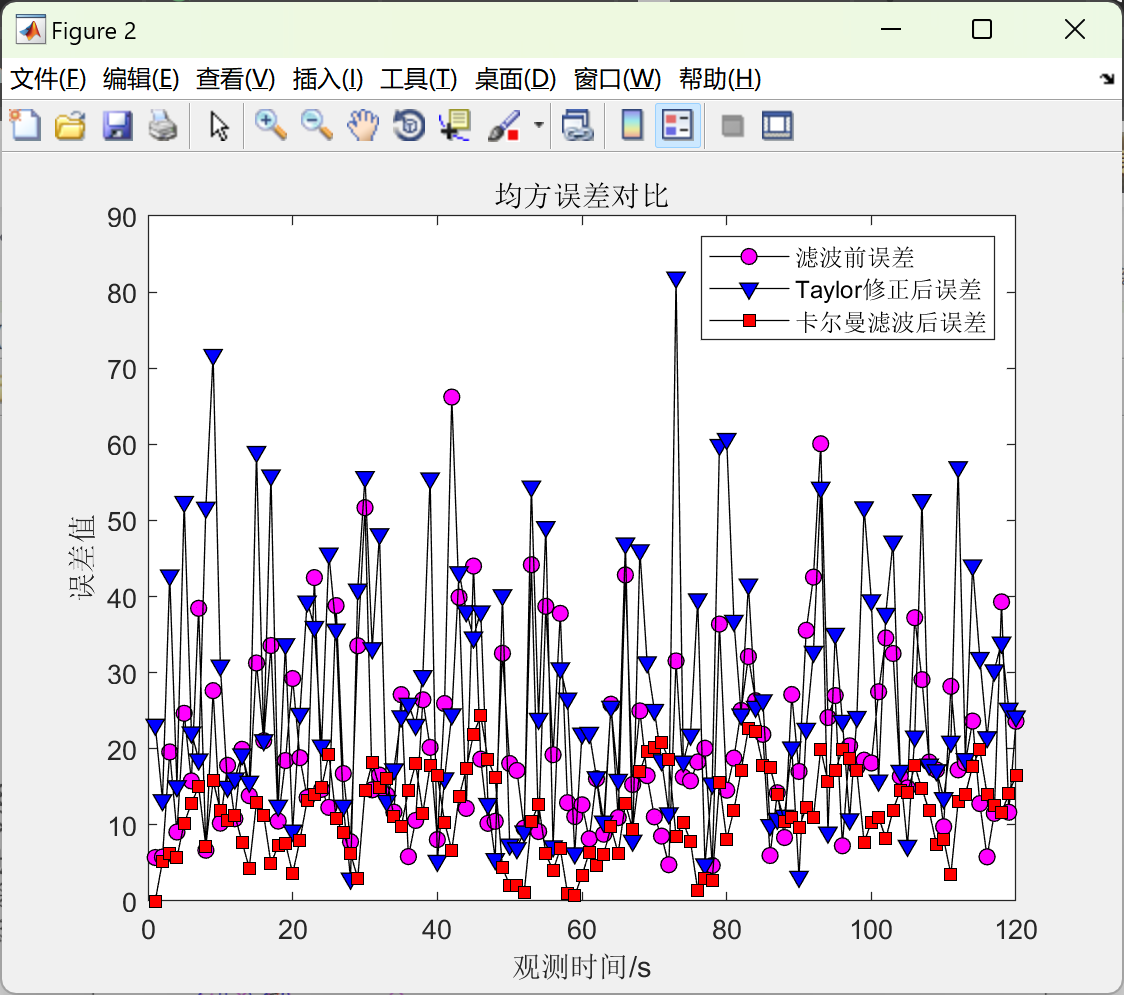
% 误差分析
for i=1:N
Observation(i)=RMS(X(:,i),Z(:,i));%滤波前的误差
TaylorFilter(i)=RMS(X(:,i),TL(:,i));%Taylor修正后的误差
KalmanFilter(i)=RMS(X(:,i),Xkf(:,i));%卡尔曼滤波后的误差
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 画图
figure
hold on;box on;
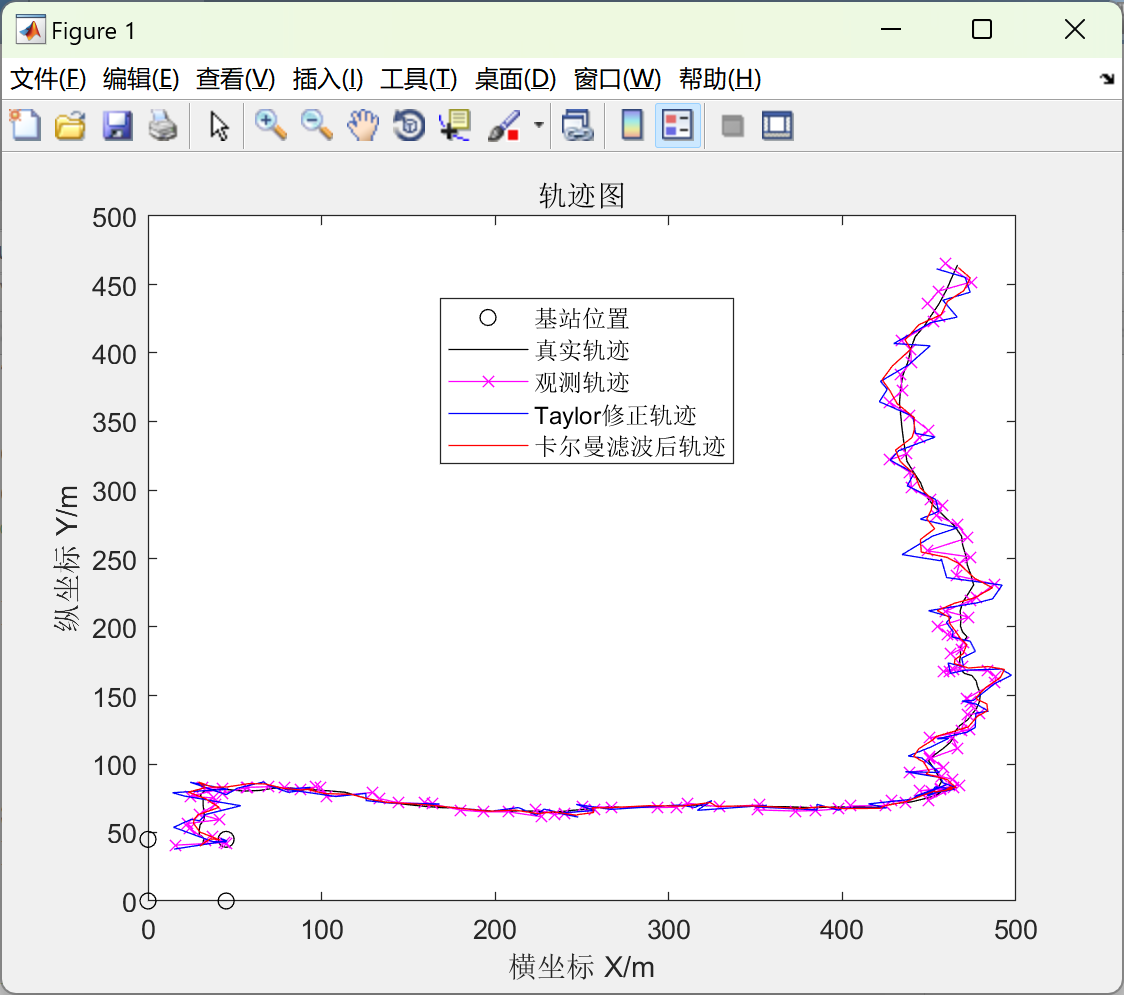
plot(BS(1,:),BS(2,:),'ko');%基站
plot(X(1,:),X(3,:),'-k');%真实轨迹
plot(Z(1,:),Z(2,:),'-mx');%观测轨迹
plot(TL(1,:),TL(2,:),'-b');%Taylor修正轨迹
plot(Xkf(1,:),Xkf(3,:),'-r');%Kalman滤波轨迹
legend('基站位置','真实轨迹','观测轨迹','Taylor修正轨迹','卡尔曼滤波后轨迹') ;
xlabel('横坐标 X/m'); ylabel('纵坐标 Y/m');
title('轨迹图');
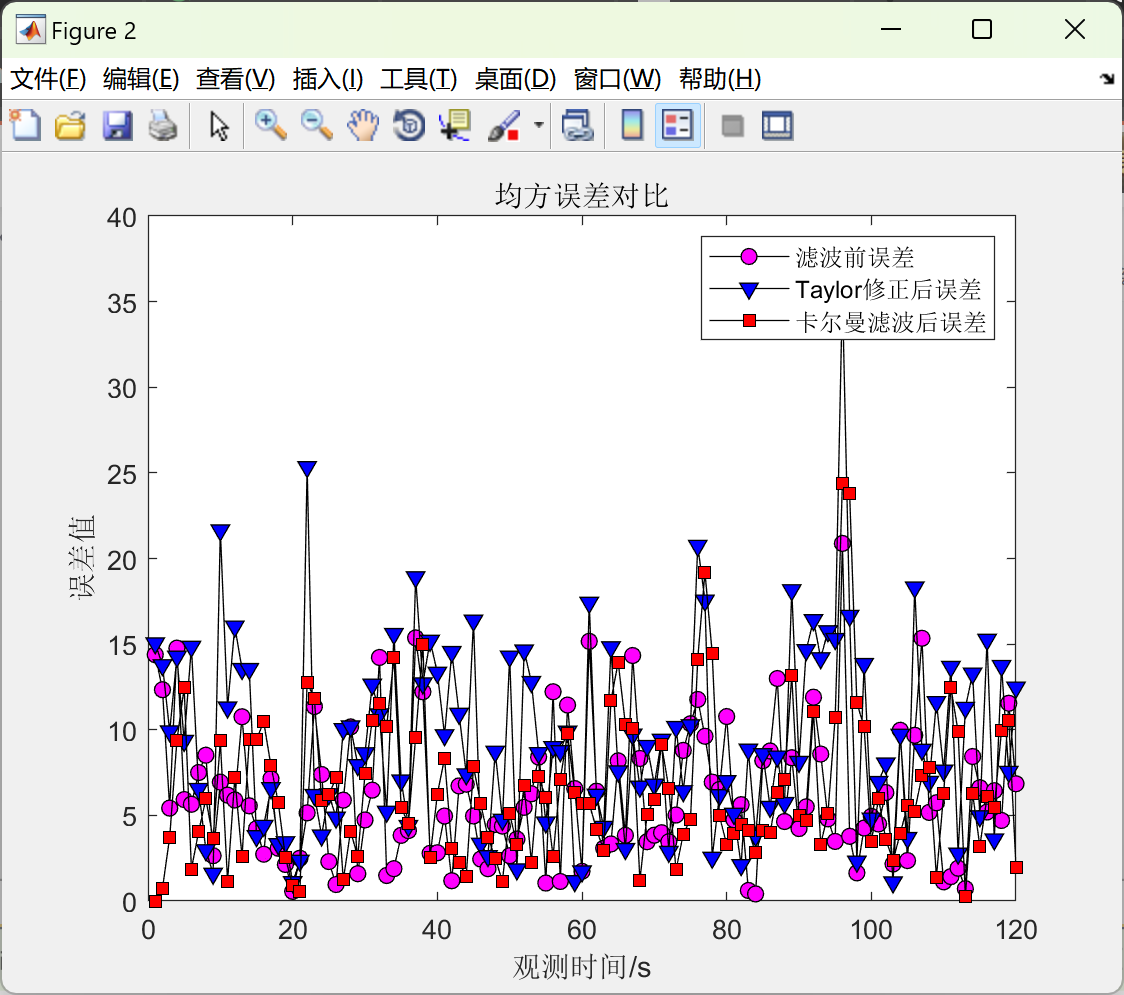
figure
hold on;box on;
plot(Observation,'-ko','MarkerFace','m');
plot(TaylorFilter,'-kv','MarkerFace','b');
plot(KalmanFilter,'-ks','MarkerFace','r');
legend('滤波前误差','Taylor修正后误差','卡尔曼滤波后误差');
xlabel('观测时间/s'); ylabel('误差值');
title("均方误差对比");
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]张晨曦. 超宽带信标室内定位系统关键技术研究[D].电子科技大学,2017.
[2]安连锁,冯强,沈国清,张世平,王鹏.基于基坐标变换的立体阵列的电站锅炉泄漏定位SI算法[J].现代电力,2011,28(06):50-53.
🌈4 Matlab代码、说明文档、文献下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取