写在前面:
上一讲我们对图有了一个大概的了解,但是只讲了如何存储图,还没有讲如何遍历图。这一讲我们来介绍图的遍历方式,一共分为深度优先搜索(DFS)和宽度优先搜索(BFS)。
深度优先搜索
深度优先搜索 ,简称为 DFS 。事实上,我们在树的遍历中早已涉及 DFS ,层、前序遍历、中序遍历和后序遍历都属于深度优先遍历的方式,因为这些遍历方式本质上都归结于栈。
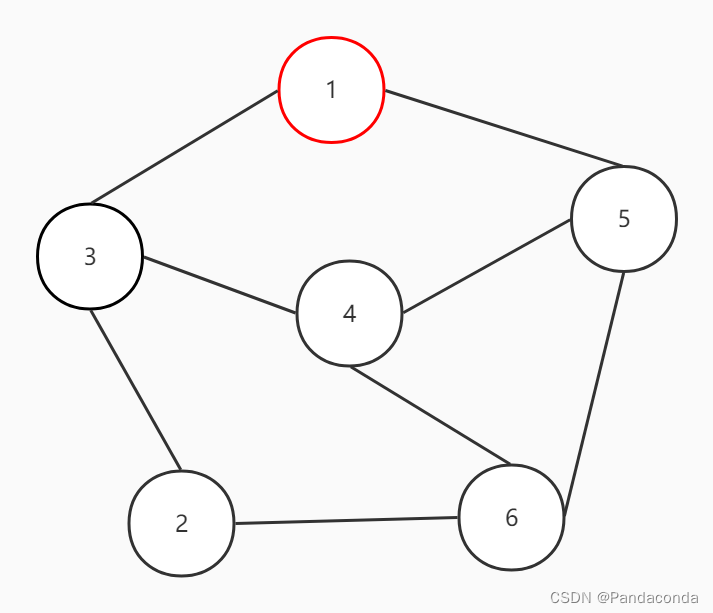
为了方便大家理解,我们还是以画图的方式来呈现(我们从结点 1 开始遍历):
1、从结点 1 的第一个相邻结点即结点 2 开始遍历,先遍历哪个点一般取决于存储边的时候是以什么方式进行。
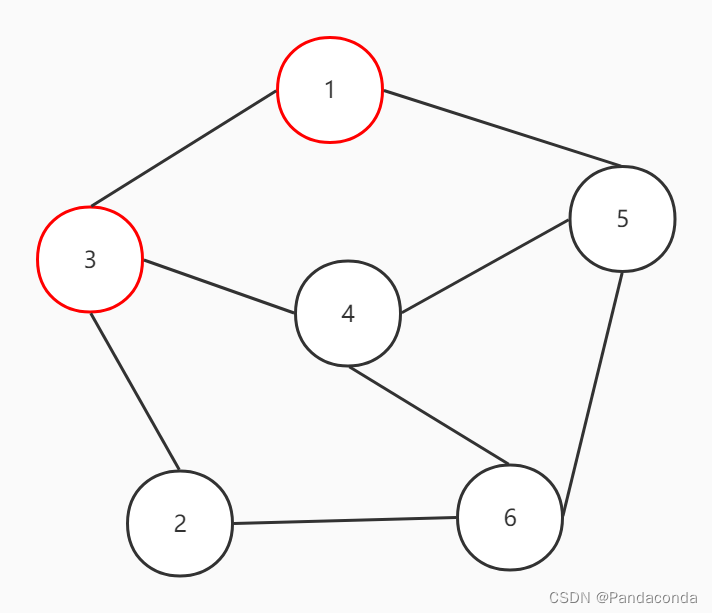
2、以相同的方式继续沿结点的第一个相邻结点即结点 2 遍历,就这样一直往前递归遍历直至无法继续向前。
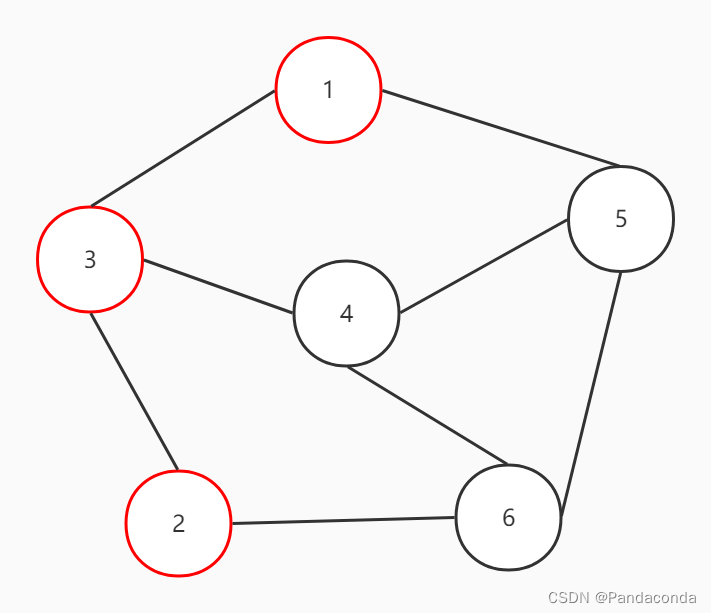
3、同上,往结点 6 进行遍历。
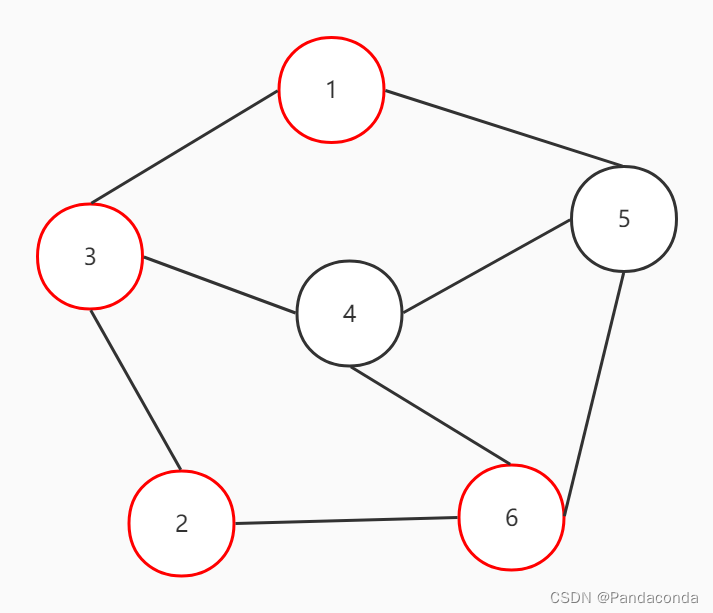
4、同上,往结点 4 进行遍历。
5、这里需要注意,结点 4 与结点 3 是相连的,所以可能会遍历到结点 3 ,但是结点 3 已经遍历过了,故直接跳到下一个结点即结点 5 进行遍历。
6、此时发现与结点 5 相邻的所有结点都已经遍历过了,故遍历结束。
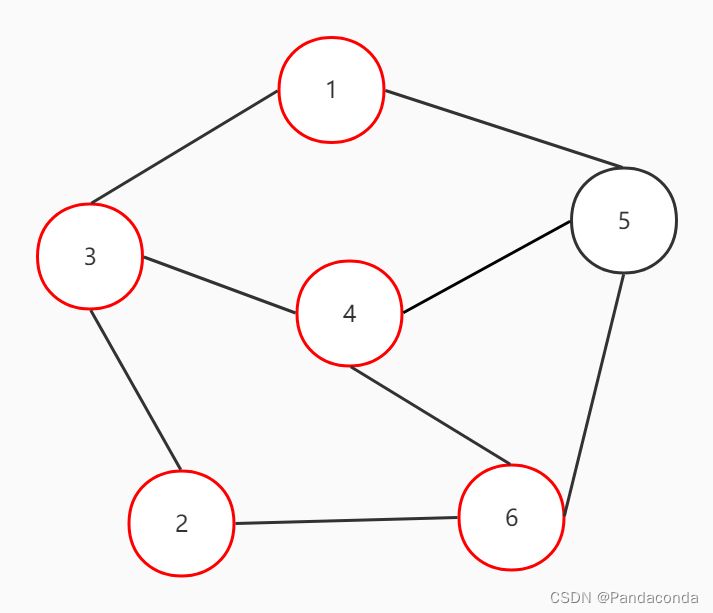
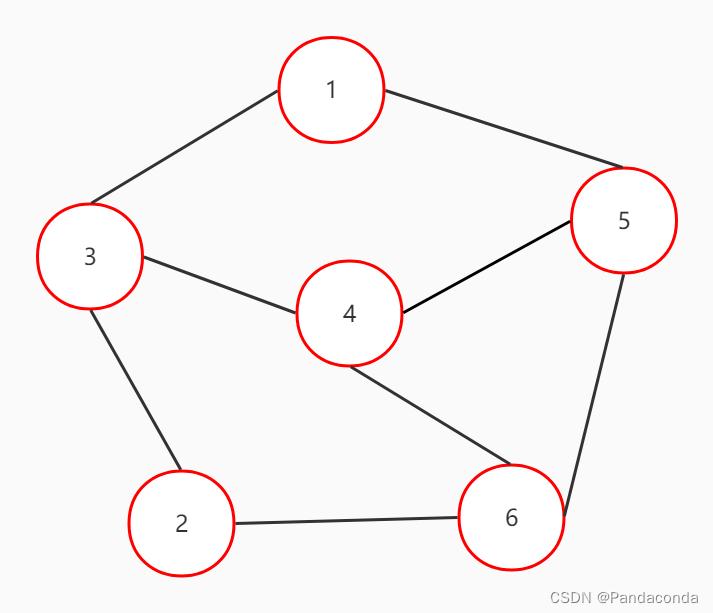
其实我们通过上面的操作可以发现,深度优先搜索就是往一个方向一条路走到黑,不撞南墙不回头,没有遇到死路就不会进行回溯。
构建图
我们这里存储的是无向图,采用邻接表进行存储,还不清楚邻接表的小伙伴可以去看我上一讲的内容,这里附上传送门:
//定义结点
struct VertexNode
{
int data; //结点数据
int weight = 0; //边的权值
VertexNode* next = NULL;
};
//定义图
struct GraphAdjList
{
VertexNode* AdjList[MaxVertices]; //用邻接表存储无向图
int numV, numE;
};
//构建图
void CreatGraph(GraphAdjList& G)
{
int vi, vj, w;
cout << "请输入顶点数:" << endl;
cin >> G.numV;
cout << "请输入顶点信息:" << endl;
//初始化结点数组
for (int i = 0; i < G.numV; i++)
{
cin >> vi;
VertexNode* new_node = new VertexNode;
new_node->data = vi;
G.AdjList[i] = new_node;
}
cout << "请输入边的数量:" << endl;
cin >> G.numE;
cout << "请输入边的信息:" << endl;
for (int i = 0; i < G.numE; i++)
{
cin >> vi >> vj >> w;
//找到结点在数组中的位置,存储边 vi -> vj
for (int j = 0; j < G.numV; j++)
{
if (vi == G.AdjList[j]->data)
{
VertexNode* temp = G.AdjList[j];
//这里采用尾插法
while (temp->next != NULL)
{
temp = temp->next;
}
VertexNode* newEdge = new VertexNode;
newEdge->data = vj;
newEdge->weight = w;
temp->next = newEdge;
break;
}
}
//由于存储的是无向图,故要还要反过来存储边 vj -> vi
int t = vi;
vi = vj;
vj = t;
for (int j = 0; j < G.numV; j++)
{
if (vi == G.AdjList[j]->data)
{
VertexNode* temp = G.AdjList[j];
while (temp->next != NULL)
{
temp = temp->next;
}
VertexNode* newEdge = new VertexNode;
newEdge->data = vj;
newEdge->weight = w;
temp->next = newEdge;
break;
}
}
}
}
图的深度优先遍历
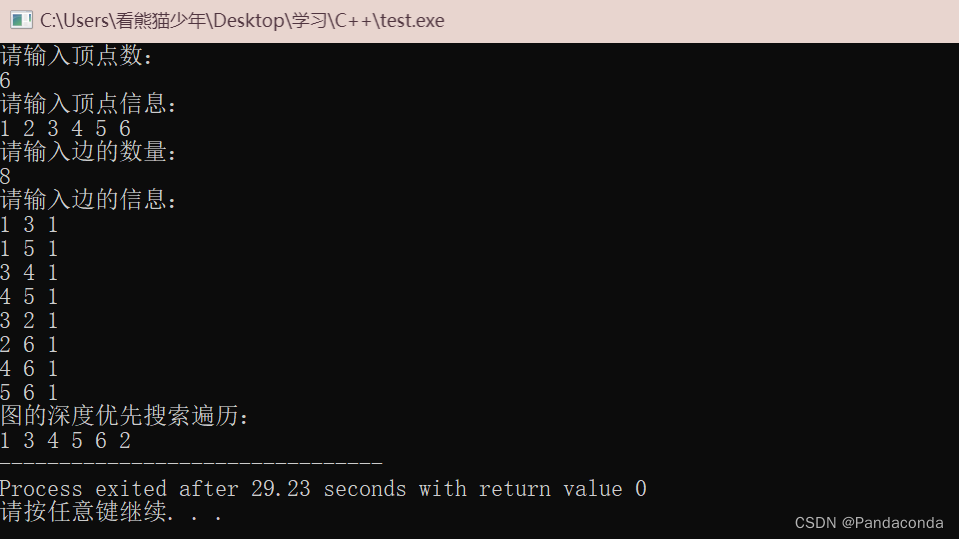
这里利用了两个遍历的函数,一个是主遍历一个是次遍历,因为在遍历的过程中要考虑到没有遍历全的情况,即沿着第一个结点的第一条边去遍历,结果遍历完仍有结点没有被遍历到。所以我们要对所有结点都进行深度遍历,这样就能确保所有结点都能被遍历到了。
另外需要注意的是,我在输入的时候同时输入了边的权值,但是下面代码中我没有输出它,大家可以根据情况调整想要输出的数据。
int visited[100] = { 0 }; //用来判断该结点是否有被访问过
//找到该结点在邻接表数组中的下标
int get_index(GraphAdjList& G, int key)
{
for (int i = 0; i < G.numV; i++)
{
if (key == G.AdjList[i]->data)
{
return i;
}
}
}
//深度优先遍历
void DFSTraverse(GraphAdjList& G, int key)
{
//遍历与该结点相连的每一条边
VertexNode* temp = G.AdjList[key]->next;
while (temp != NULL)
{
int vx = get_index(G, temp->data);
if (visited[vx] == 0)
{
cout << temp->data << " ";
visited[vx] = 1;
DFSTraverse(G, vx);
}
temp = temp->next;
}
}
//深度优先搜索
void DFS(GraphAdjList& G)
{
//遍历邻接表中每一个头结点
for (int i = 0; i < G.numV; i++)
{
//如果该结点没有被访问过,则遍历该结点
if (visited[i] == 0)
{
visited[i] = 1; //更新该结点状态
cout << G.AdjList[i]->data << " ";
//遍历与头结点向连的每一个结点
VertexNode* temp = G.AdjList[i]->next;
while (temp != NULL)
{
int vx = get_index(G, temp->data);
if (visited[vx] == 0)
{
cout << temp->data << " ";
visited[vx] = 1;
DFSTraverse(G, vx);
}
temp = temp->next;
}
}
}
}
全部代码
#include<bits/stdc++.h>
using namespace std;
#define MaxVertices 100
int Size;
int maxSize = 100;
//定义结点
struct VertexNode
{
int data; //结点数据
int weight = 0; //边的权值
VertexNode* next = NULL;
};
//定义图
struct GraphAdjList
{
VertexNode* AdjList[MaxVertices]; //用邻接表存储无向图
int numV, numE;
};
//构建图
void CreatGraph(GraphAdjList& G)
{
int vi, vj, w;
cout << "请输入顶点数:" << endl;
cin >> G.numV;
cout << "请输入顶点信息:" << endl;
//初始化结点数组
for (int i = 0; i < G.numV; i++)
{
cin >> vi;
VertexNode* new_node = new VertexNode;
new_node->data = vi;
G.AdjList[i] = new_node;
}
cout << "请输入边的数量:" << endl;
cin >> G.numE;
cout << "请输入边的信息:" << endl;
for (int i = 0; i < G.numE; i++)
{
cin >> vi >> vj >> w;
//找到结点在数组中的位置,存储边 vi -> vj
for (int j = 0; j < G.numV; j++)
{
if (vi == G.AdjList[j]->data)
{
VertexNode* temp = G.AdjList[j];
//这里采用尾插法
while (temp->next != NULL)
{
temp = temp->next;
}
VertexNode* newEdge = new VertexNode;
newEdge->data = vj;
newEdge->weight = w;
temp->next = newEdge;
break;
}
}
//由于存储的是无向图,故要还要反过来存储边 vj -> vi
int t = vi;
vi = vj;
vj = t;
for (int j = 0; j < G.numV; j++)
{
if (vi == G.AdjList[j]->data)
{
VertexNode* temp = G.AdjList[j];
while (temp->next != NULL)
{
temp = temp->next;
}
VertexNode* newEdge = new VertexNode;
newEdge->data = vj;
newEdge->weight = w;
temp->next = newEdge;
break;
}
}
}
}
int visited[100] = { 0 }; //用来判断该结点是否有被访问过
//找到该结点在邻接表数组中的下标
int get_index(GraphAdjList& G, int key)
{
for (int i = 0; i < G.numV; i++)
{
if (key == G.AdjList[i]->data)
{
return i;
}
}
}
//深度优先遍历
void DFSTraverse(GraphAdjList& G, int key)
{
//遍历与该结点相连的每一条边
VertexNode* temp = G.AdjList[key]->next;
while (temp != NULL)
{
int vx = get_index(G, temp->data);
if (visited[vx] == 0)
{
cout << temp->data << " ";
visited[vx] = 1;
DFSTraverse(G, vx);
}
temp = temp->next;
}
}
//深度优先搜索
void DFS(GraphAdjList& G)
{
//遍历邻接表中每一个头结点
for (int i = 0; i < G.numV; i++)
{
//如果该结点没有被访问过,则遍历该结点
if (visited[i] == 0)
{
visited[i] = 1; //更新该结点状态
cout << G.AdjList[i]->data << " ";
//遍历与头结点向连的每一个结点
VertexNode* temp = G.AdjList[i]->next;
while (temp != NULL)
{
int vx = get_index(G, temp->data);
if (visited[vx] == 0)
{
cout << temp->data << " ";
visited[vx] = 1;
DFSTraverse(G, vx);
}
temp = temp->next;
}
}
}
}
int main()
{
GraphAdjList GA;
CreatGraph(GA);
DFS(GA);
return 0;
}
宽度优先搜索
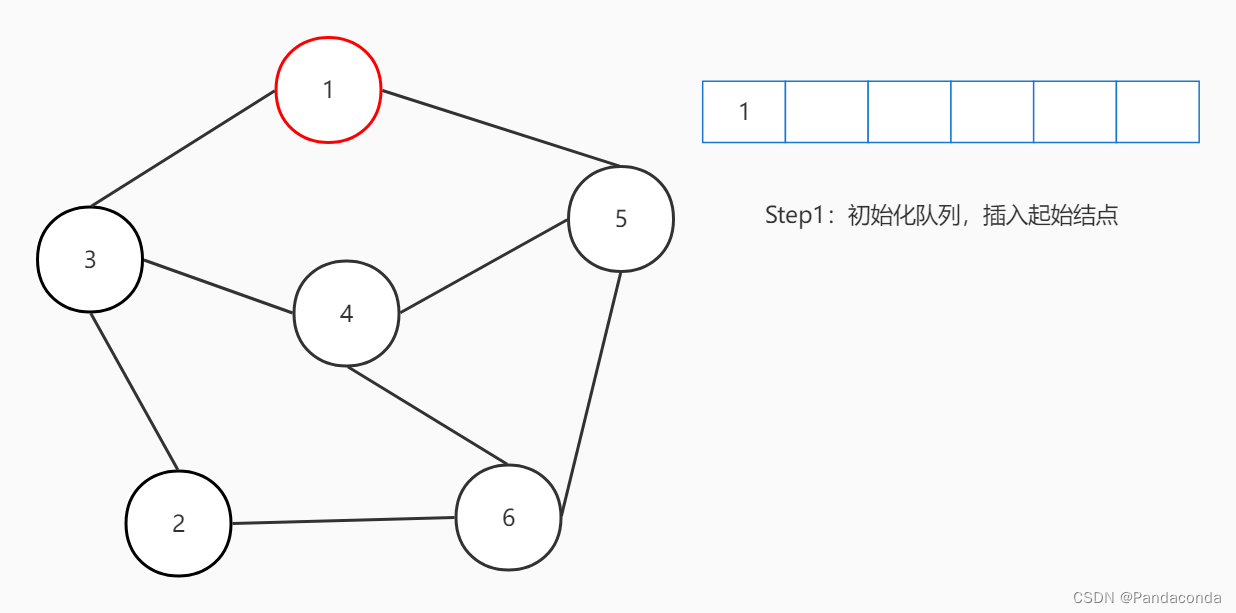
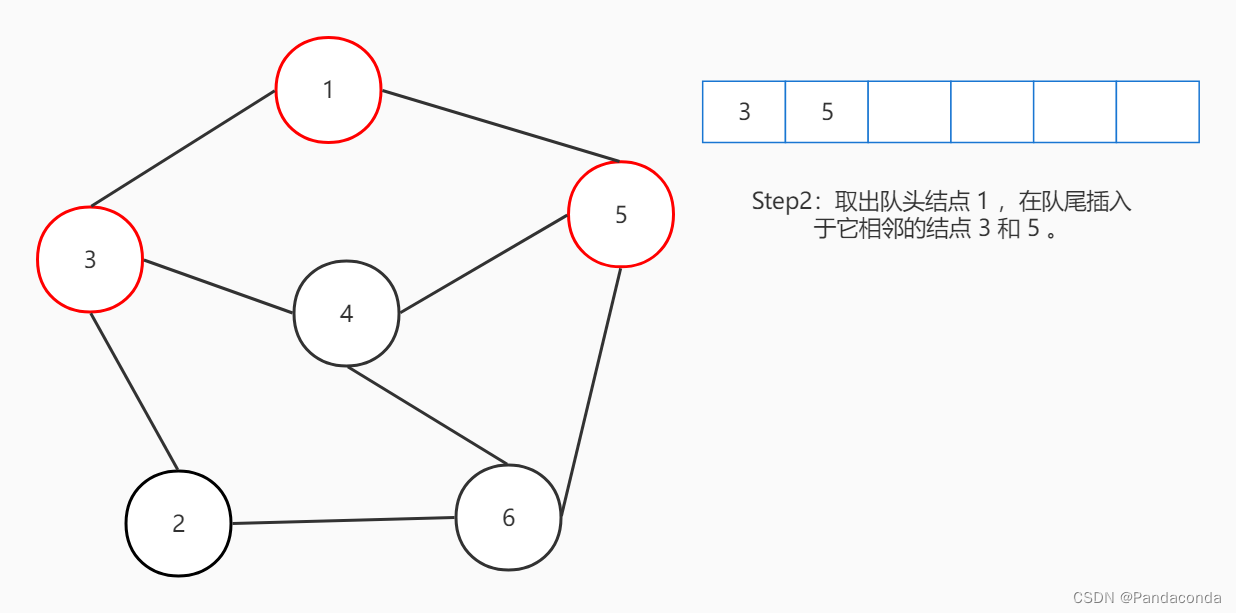
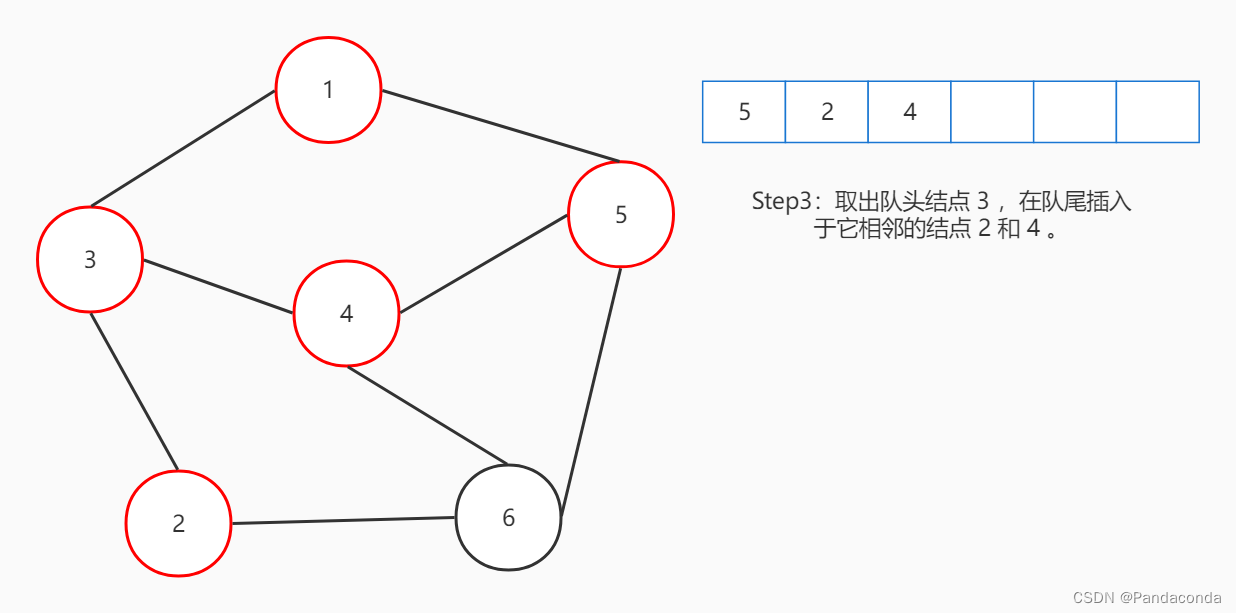
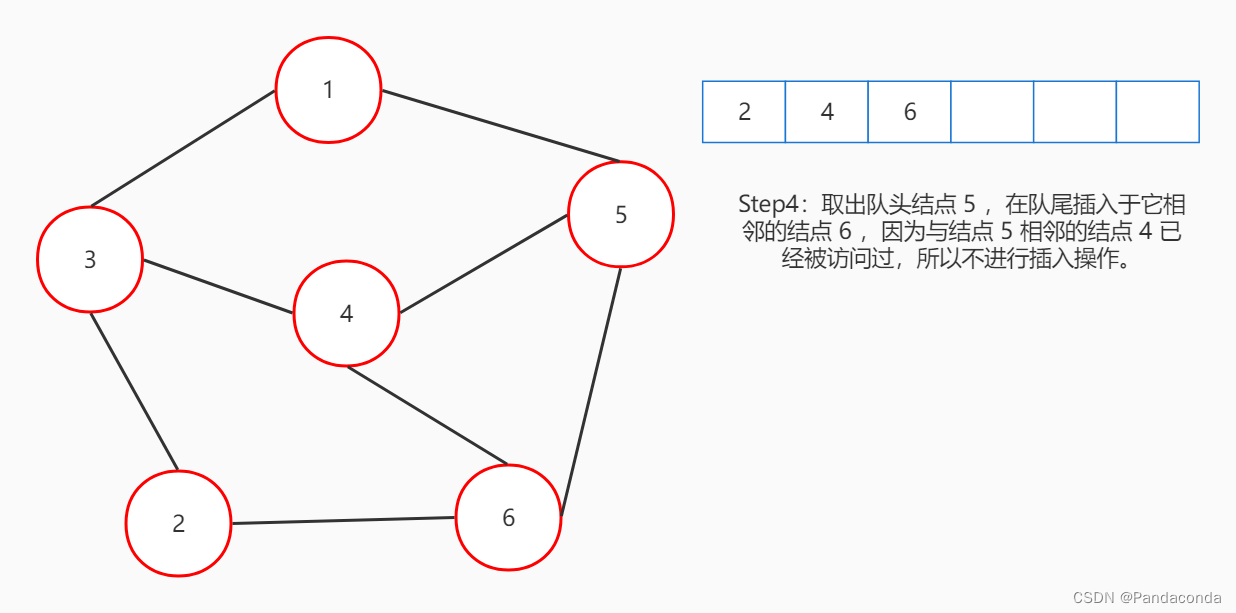
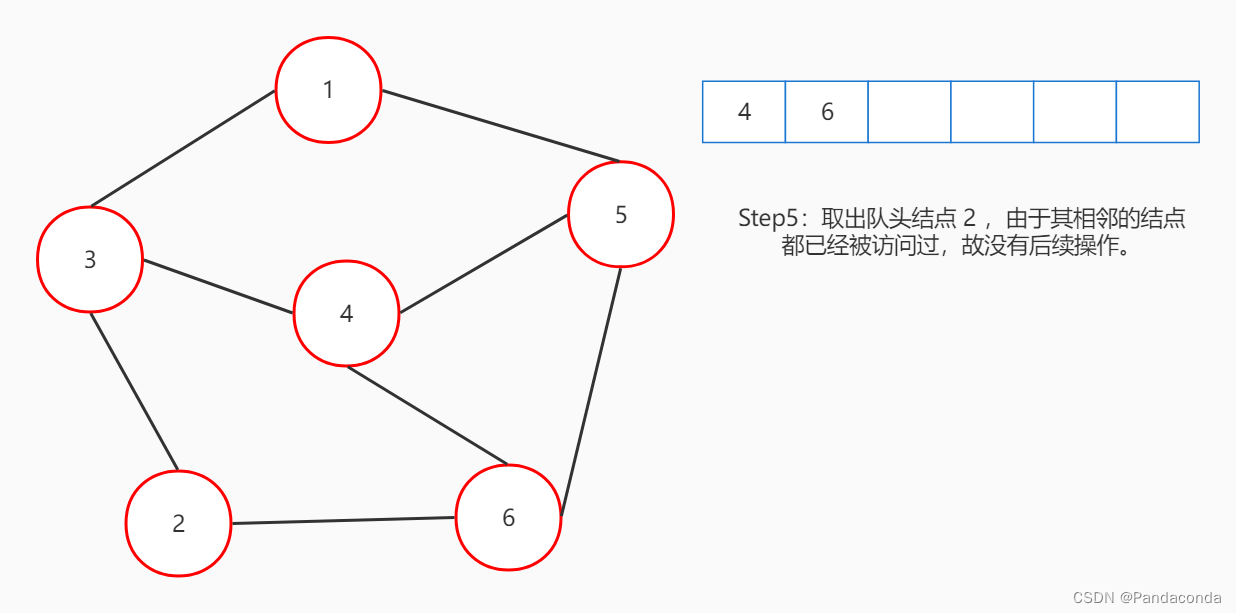
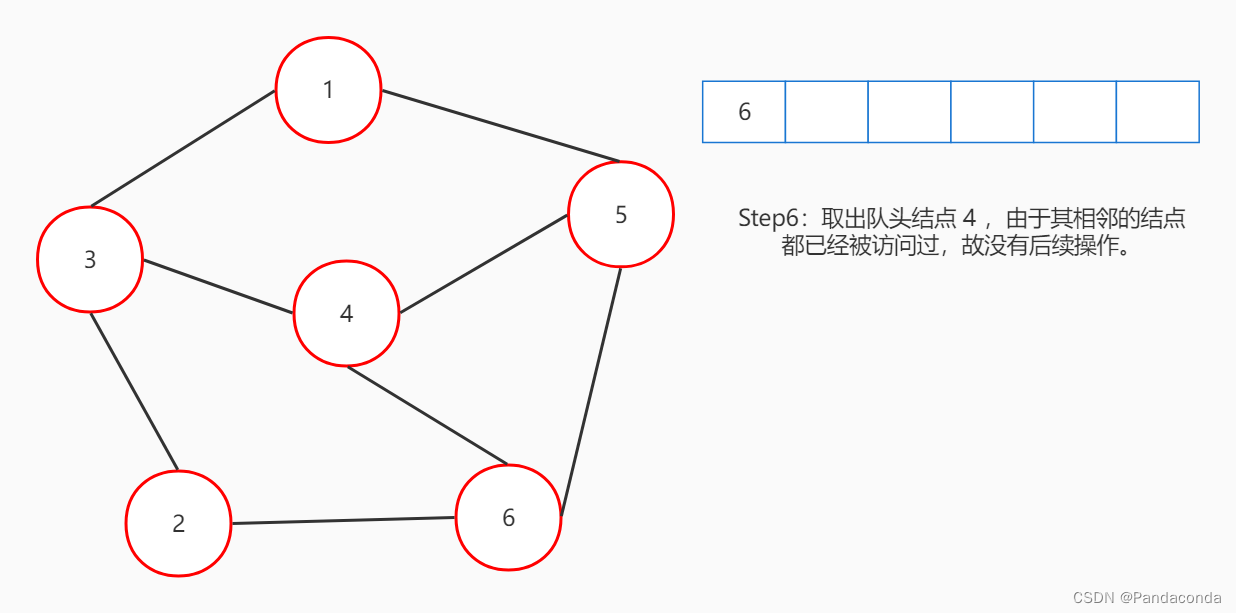
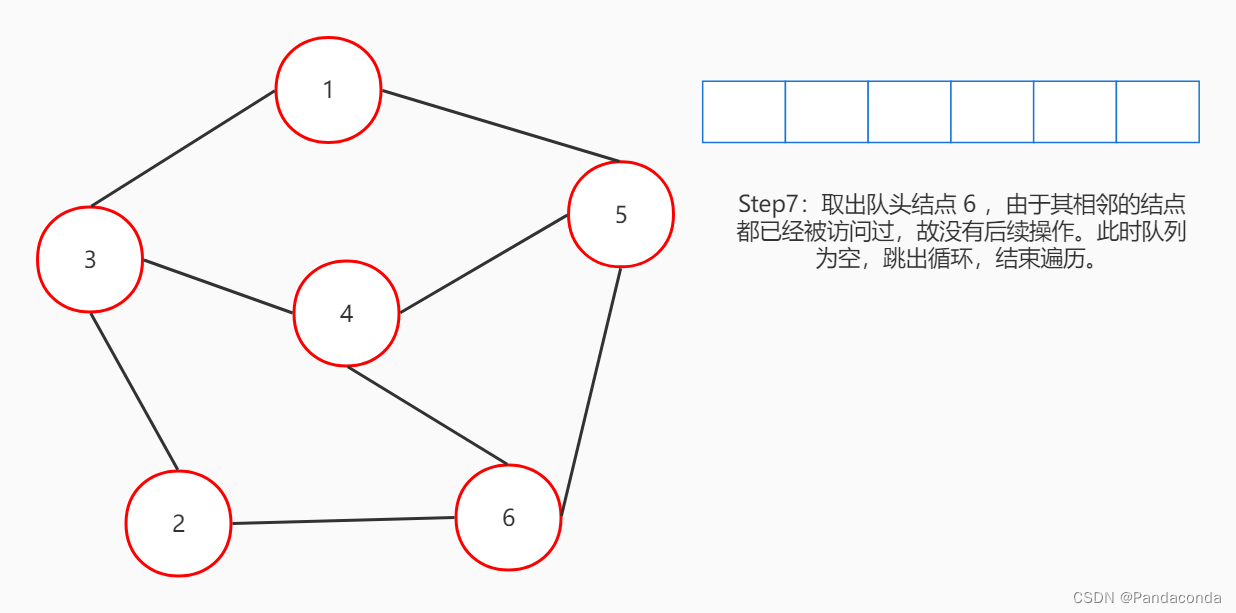
宽度优先搜索,简称 BFS 。在之前讲树的内容中,层次遍历实际上也属于宽度优先搜索。它们都用一个队列来维护元素,每次都从队头取出元素,再将与队头相邻的元素插入队尾。我们继续用图来演示:
构建图
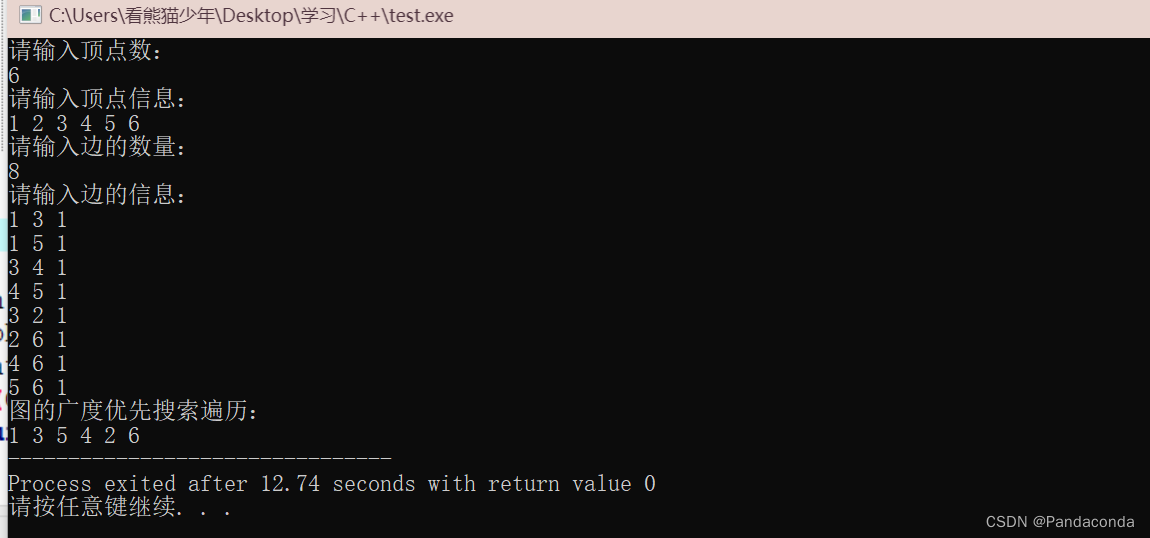
宽度优先搜索我们同样可以用邻接表来存储,上面深度优先搜索我们存的是无向图,这次我们来试试有向图,比上面少了一部分操作。因为存的是有向边,所以只需要邻接表而不需要逆邻接表。由于与上面代码重复度高,所以这个部分我直接放在后面全部代码的部分了。
图的宽度优先遍历
仔细看代码可以发现,和我们层次遍历的代码有些许相似,BFS 队列的操作代码其实都是大同小异。
这里代码和上面的深搜一样没有输出权值,但是输入包含了权值,可以根据需求调整输出内容。
另外,为了方便大家更加直观的理解,我这里就没有手动实现队列了,直接调用 C++ STL 库中的 queue 。想要再复习一下手敲队列的小伙伴,可以移步到之前的文章中看看:
线性表 - 05 队列(数组实现)
线性表 - 06 队列(链表实现)
//找到该结点在邻接表数组中的下标
int get_index(GraphAdjList &G, int key) {
for (int i = 0; i < G.numV; i++) {
if (key == G.AdjList[i]->data) {
return i;
}
}
}
//宽度优先遍历
void BFS(GraphAdjList &G) {
int visited[100] = {0}; //用来判断该结点是否有被访问过
queue<int> Q; //用一个队列来保存结点
cout << "图的广度优先搜索遍历:" << endl;
//对每个点都进行一次BFS,考虑到图中有断边的情况
for (int i = 0; i < G.numV; i++) {
//如果该结点没被访问过,才继续进行操作
if (visited[i] == 0) {
visited[i] = 1;
int vi = G.AdjList[i]->data;
Q.push(vi); //初始化队列,将起点插入队列
//每次从队头拿出结点,再将它相邻的所有结点插入队尾,直到队列为空
while (!Q.empty()) {
vi = Q.front();
Q.pop();
cout << vi << " ";
int vx = get_index(G, vi);
VertexNode *temp = G.AdjList[vx]->next;
while (temp != NULL) {
vx = get_index(G, temp->data);
if (visited[vx] == 0) {
visited[vx] = 1;
Q.push(temp->data);
}
temp = temp->next;
}
}
}
}
}
全部代码
#include <bits/stdc++.h>
using namespace std;
#define MaxVertices 100
//定义结点
struct VertexNode {
int data;
int weight = 0;
VertexNode *next = NULL;
};
//定义图
struct GraphAdjList {
VertexNode *AdjList[MaxVertices]; //用邻接表存储结点
int numV, numE;
};
//构建图
void CreatGraph(GraphAdjList &G) {
int vi, vj, w;
cout << "请输入顶点数:" << endl;
cin >> G.numV;
cout << "请输入顶点信息:" << endl;
//初始化结点数组
for (int i = 0; i < G.numV; i++) {
cin >> vi;
VertexNode *new_node = new VertexNode;
new_node->data = vi;
G.AdjList[i] = new_node;
}
cout << "请输入边的数量:" << endl;
cin >> G.numE;
cout << "请输入边的信息:" << endl;
for (int i = 0; i < G.numE; i++) {
cin >> vi >> vj >> w;
//找到结点在数组中的位置,存储边 vi -> vj
for (int j = 0; j < G.numV; j++) {
if (vi == G.AdjList[j]->data) {
VertexNode *temp = G.AdjList[j];
//这里采用尾插法
while (temp->next != NULL) {
temp = temp->next;
}
VertexNode *newEdge = new VertexNode;
newEdge->data = vj;
newEdge->weight = w;
temp->next = newEdge;
break;
}
}
}
}
//找到该结点在邻接表数组中的下标
int get_index(GraphAdjList &G, int key) {
for (int i = 0; i < G.numV; i++) {
if (key == G.AdjList[i]->data) {
return i;
}
}
}
//宽度优先遍历
void BFS(GraphAdjList &G) {
int visited[100] = {0}; //用来判断该结点是否有被访问过
queue<int> Q; //用一个队列来保存结点
cout << "图的广度优先搜索遍历:" << endl;
//对每个点都进行一次BFS,考虑到图中有断边的情况
for (int i = 0; i < G.numV; i++) {
//如果该结点没被访问过,才继续进行操作
if (visited[i] == 0) {
visited[i] = 1;
int vi = G.AdjList[i]->data;
Q.push(vi); //初始化队列,将起点插入队列
//每次从队头拿出结点,再将它相邻的所有结点插入队尾,直到队列为空
while (!Q.empty()) {
vi = Q.front();
Q.pop();
cout << vi << " ";
int vx = get_index(G, vi);
VertexNode *temp = G.AdjList[vx]->next;
while (temp != NULL) {
vx = get_index(G, temp->data);
if (visited[vx] == 0) {
visited[vx] = 1;
Q.push(temp->data);
}
temp = temp->next;
}
}
}
}
}
int main() {
GraphAdjList GA;
CreatGraph(GA);
BFS(GA);
return 0;
}
如果大家有什么问题的话,欢迎在下方评论区进行讨论哦~