1.底层结构
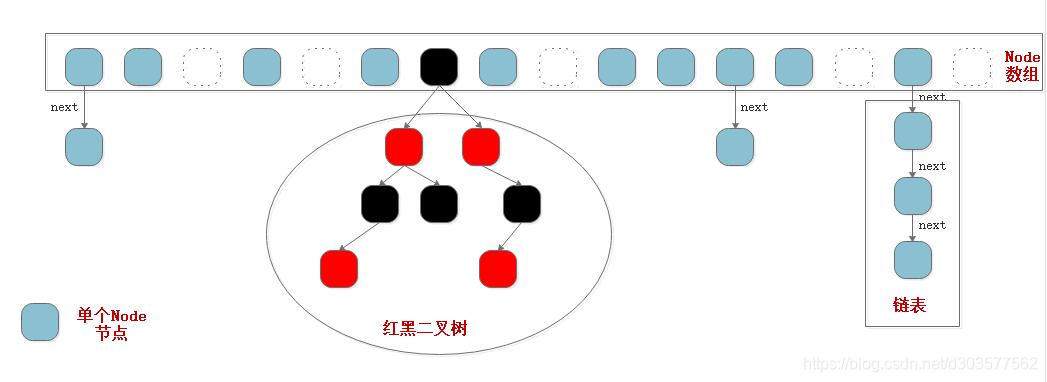
ConcurrentHashMap的底层结构和HashMap是一致的,都是使用的数组+链表+红黑树。
2.链表转化为红黑树的场景和原因
1.场景
在putVal()方法中,链表新增完一个节点的时候,会对链表长度进行判断,如果链表长度大于8(包含当前新增节点),并且数组长度大于等于64,则转化为红黑树,否则扩容。
final V putVal(K key, V value, boolean onlyIfAbsent) {
if (key == null || value == null) throw new NullPointerException();
int hash = spread(key.hashCode());
int binCount = 0;
for (Node<K,V>[] tab = table;;) {
Node<K,V> f; int n, i, fh;
if (tab == null || (n = tab.length) == 0)
tab = initTable();
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
//如果数组该位置为空
//用一次CAS操作将新new出来的Node节点放入该位置
//如果CAS失败,就说明有并发,进入下一次循环
if (casTabAt(tab, i, null,
new Node<K,V>(hash, key, value, null)))
break;
}
else if ((fh = f.hash) == MOVED)
tab = helpTransfer(tab, f);
else {
V oldVal = null;
synchronized (f) {
if (tabAt(tab, i) == f) {
if (fh >= 0) {
//binCount初始为1
binCount = 1;
//这里binCount代表链表中第几个节点
for (Node<K,V> e = f;; ++binCount) {
K ek;
if (e.hash == hash &&
((ek = e.key) == key ||
(ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
Node<K,V> pred = e;
//当添加了新节点的时候,binCount并没有增加
//因此binCount代表的是不包含新节点的原先链表长度
if ((e = e.next) == null) {
pred.next = new Node<K,V>(hash, key,
value, null);
break;
}
}
}
else if (f instanceof TreeBin) {
Node<K,V> p;
binCount = 2;
if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key,
value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
if (binCount != 0) {
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;
break;
}
}
}
addCount(1L, binCount);
return null;
}
private final void treeifyBin(Node<K,V>[] tab, int index) {
Node<K,V> b; int n, sc;
if (tab != null) {
//这里会先判定数组是否小于64
//小于的话直接扩容,不会转红黑树
if ((n = tab.length) < MIN_TREEIFY_CAPACITY)
tryPresize(n << 1);
else if ((b = tabAt(tab, index)) != null && b.hash >= 0) {
synchronized (b) {
if (tabAt(tab, index) == b) {
TreeNode<K,V> hd = null, tl = null;
for (Node<K,V> e = b; e != null; e = e.next) {
TreeNode<K,V> p =
new TreeNode<K,V>(e.hash, e.key, e.val,
null, null);
if ((p.prev = tl) == null)
hd = p;
else
tl.next = p;
tl = p;
}
setTabAt(tab, index, new TreeBin<K,V>(hd));
}
}
}
}
}
2.原因
链表查找的时间复杂度为O(N/2),红黑树查找的时间复杂度为:O(logN)。
在N为8时,链表查询时间为8/2 = 4,红黑树查找时间为log8 = 3。
此时,查询的时间优势已经有所体现,当N越大的时候,越明显。
但是红黑树的增删改的维护成本很高。为什么在链表长度大于8的时候,就要转为红黑树呢?
以下是源码的一部分:
* The main disadvantage of per-bin locks is that other update
* operations on other nodes in a bin list protected by the same
* lock can stall, for example when user equals() or mapping
* functions take a long time. However, statistically, under
* random hash codes, this is not a common problem. Ideally, the
* frequency of nodes in bins follows a Poisson distribution
* (http://en.wikipedia.org/wiki/Poisson_distribution) with a
* parameter of about 0.5 on average, given the resizing threshold
* of 0.75, although with a large variance because of resizing
* granularity. Ignoring variance, the expected occurrences of
* list size k are (exp(-0.5) * pow(0.5, k) / factorial(k)). The
* first values are:
*
* 0: 0.60653066
* 1: 0.30326533
* 2: 0.07581633
* 3: 0.01263606
* 4: 0.00157952
* 5: 0.00015795
* 6: 0.00001316
* 7: 0.00000094
* 8: 0.00000006
* more: less than 1 in ten million
源码意思是说:Hash函数算出的HashCode导致冲突的概率符合泊松分布。在达到8的时候,已经是小于千万分之一的几率了。这里的8是从0开始算的,所以说长度为9。
因此,当链表长度等于8时已经是非常小的小概率事件了。这就说明此时再进行增加的概率微乎及微,因此增加的时间复杂度可以忽略不计,主要看查询的时间复杂度就行了。于是红黑树查询复杂度的优势一下子都显现出来了。
3.扩容机制
ConcurrentHashMap的扩容机制简单概括:
1.触发条件:当前数组长度小于64时,链表树化前和节点数量达到阈值时都会触发;当前数组长度大于等于64时,只有节点数量达到阈值时才会触发。
2.扩容大小:扩容机制和HashMap一样,扩容一倍。
3.是否支持并发:扩容时支持并发扩容,通过synchronized(Node) + CAS来保证线程安全。
4.流程:新建一个2倍大小的新节点数组,然后将旧数组里面的数据转移到新节点数组中。
5.参与线程:触发扩容的线程以及在扩容阶段对节点进行修改操作的线程,如增加、替换等。
扩容是通过transfer()方法实现的
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
int n = tab.length, stride;
//计算步长,表示一个线程处理的数组长度,用来控制对CPU的使用。
//每个CPU最少处理16个长度的数组元素
//如果一个数组的长度只有16,那只有一个线程进行扩容任务
if ((stride = (NCPU > 1) ? (n >>> 3) / NCPU : n) < MIN_TRANSFER_STRIDE)
stride = MIN_TRANSFER_STRIDE; // subdivide range
if (nextTab == null) {
//初始化扩容要用的新数组
try {
@SuppressWarnings("unchecked")
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n << 1];
nextTab = nt;
} catch (Throwable ex) { // try to cope with OOME
sizeCtl = Integer.MAX_VALUE;
return;
}
nextTable = nextTab;
transferIndex = n;
}
int nextn = nextTab.length;
//这个用来标记数组中的节点已经被转移
ForwardingNode<K,V> fwd = new ForwardingNode<K,V>(nextTab);
//当为true时,线程可以参与到扩容的任务中。
//当为false时,说明线程自己的扩容任务没有结束或者扩容流程已经结束。
boolean advance = true;
//确保在提交新表格之前进行扫描
boolean finishing = false;
for (int i = 0, bound = 0;;) {
Node<K,V> f; int fh;
while (advance) {
int nextIndex, nextBound;
//扩容已经结束
if (--i >= bound || finishing)
advance = false;
//扩容任务已被划分完毕
else if ((nextIndex = transferIndex) <= 0) {
i = -1;
advance = false;
}
//通过CAS参与到扩容任务中
//CAS如果成功,则抢夺到nextIndex到nextBound这段区间的数据转移任务
else if (U.compareAndSwapInt
(this, TRANSFERINDEX, nextIndex,
nextBound = (nextIndex > stride ?
nextIndex - stride : 0))) {
bound = nextBound;
i = nextIndex - 1;
advance = false;
}
}
if (i < 0 || i >= n || i + n >= nextn) {
int sc;
if (finishing) {
//任务完成,更换新旧表引用,将新表引用置空
nextTable = null;
table = nextTab;
sizeCtl = (n << 1) - (n >>> 1);
return;
}
//sizeCtl如果为负,表示表正在初始化或调整大小
//-1用于初始化,-(1+活动的调整大小线程数)为正在调整大小
if (U.compareAndSwapInt(this, SIZECTL, sc = sizeCtl, sc - 1)) {
//如果不等于,说明还有线程正在扩容
if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT)
return;
//此时说明扩容工作已完成
finishing = advance = true;
//在提交之前再次检查一下
i = n;
}
}
//如果节点为空,打上已被转移标记
else if ((f = tabAt(tab, i)) == null)
advance = casTabAt(tab, i, null, fwd);
//如果获取到的节点已经被转移,说明已经被处理了。
else if ((fh = f.hash) == MOVED)
advance = true;
else {
//针对单个节点进行加锁
synchronized (f) {
if (tabAt(tab, i) == f) {
Node<K,V> ln, hn;
if (fh >= 0) {
int runBit = fh & n;
Node<K,V> lastRun = f;
for (Node<K,V> p = f.next; p != null; p = p.next) {
//n必定为2的幂次方也体现在这里
//b的结果只有0或者n
int b = p.hash & n;
if (b != runBit) {
runBit = b;
lastRun = p;
}
}
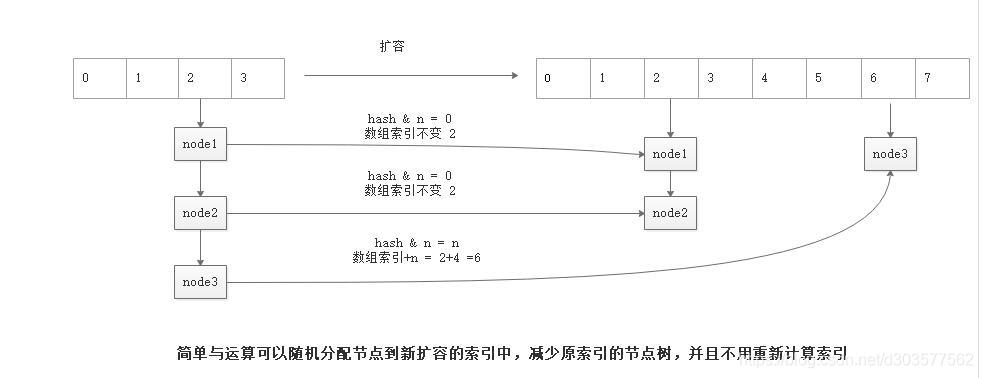
//当为0的时候,数组索引不变
if (runBit == 0) {
ln = lastRun;
hn = null;
}
//当为n的时候,数组索引+n
else {
hn = lastRun;
ln = null;
}
for (Node<K,V> p = f; p != lastRun; p = p.next) {
int ph = p.hash; K pk = p.key; V pv = p.val;
if ((ph & n) == 0)
ln = new Node<K,V>(ph, pk, pv, ln);
else
hn = new Node<K,V>(ph, pk, pv, hn);
}
//将原本表中的节点转移到新表
setTabAt(nextTab, i, ln);
setTabAt(nextTab, i + n, hn);
//原表中对应的节点置为已处理
setTabAt(tab, i, fwd);
advance = true;
}
else if (f instanceof TreeBin) {
TreeBin<K,V> t = (TreeBin<K,V>)f;
TreeNode<K,V> lo = null, loTail = null;
TreeNode<K,V> hi = null, hiTail = null;
int lc = 0, hc = 0;
for (Node<K,V> e = t.first; e != null; e = e.next) {
int h = e.hash;
TreeNode<K,V> p = new TreeNode<K,V>
(h, e.key, e.val, null, null);
if ((h & n) == 0) {
if ((p.prev = loTail) == null)
lo = p;
else
loTail.next = p;
loTail = p;
++lc;
}
else {
if ((p.prev = hiTail) == null)
hi = p;
else
hiTail.next = p;
hiTail = p;
++hc;
}
}
//树在分裂之后如果长度不够(≤6),退化为链表
ln = (lc <= UNTREEIFY_THRESHOLD) ? untreeify(lo) :
(hc != 0) ? new TreeBin<K,V>(lo) : t;
hn = (hc <= UNTREEIFY_THRESHOLD) ? untreeify(hi) :
(lc != 0) ? new TreeBin<K,V>(hi) : t;
setTabAt(nextTab, i, ln);
setTabAt(nextTab, i + n, hn);
setTabAt(tab, i, fwd);
advance = true;
}
}
}
}
}
}
4.同步机制
ConcurrentHashMap是通过CAS+synchronized(Node)来保证同步性的。
1.CAS方法
操作节点数组
static final <K,V> Node<K,V> tabAt(Node<K,V>[] tab, int i) {
return (Node<K,V>)U.getObjectVolatile(tab, ((long)i << ASHIFT) + ABASE);
}
static final <K,V> boolean casTabAt(Node<K,V>[] tab, int i,
Node<K,V> c, Node<K,V> v) {
return U.compareAndSwapObject(tab, ((long)i << ASHIFT) + ABASE, c, v);
}
static final <K,V> void setTabAt(Node<K,V>[] tab, int i, Node<K,V> v) {
U.putObjectVolatile(tab, ((long)i << ASHIFT) + ABASE, v);
}
扩容时分配任务以及记录参与的线程数
//CAS方法通过步长来分配任务
else if (U.compareAndSwapInt
(this, TRANSFERINDEX, nextIndex,
nextBound = (nextIndex > stride ?
nextIndex - stride : 0))) {
bound = nextBound;
i = nextIndex - 1;
advance = false;
}
//sizeCtl如果为负,表示表正在初始化或调整大小
//-1用于初始化,-(1+活动的调整大小线程数)为正在调整大小
if (U.compareAndSwapInt(this, SIZECTL, sc = sizeCtl, sc - 1)) {
if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT)
return;
finishing = advance = true;
i = n;
}
新增树子节点时锁树的根节点
/**
* Acquires write lock for tree restructuring.
*/
private final void lockRoot() {
if (!U.compareAndSwapInt(this, LOCKSTATE, 0, WRITER))
contendedLock(); // offload to separate method
}
2.synchronized
Synchronized用来锁头节点,也就是通过CAS方法从节点数组中取出来的节点。
f = tabAt(tab, i = (n - 1) & hash))
synchronized (f) {...}