前期回顾
强化学习经典算法笔记(零):贝尔曼方程的推导
强化学习经典算法笔记(一):价值迭代算法Value Iteration
强化学习经典算法笔记(二):策略迭代算法Policy Iteration
强化学习经典算法笔记(三):蒙特卡罗方法Monte Calo Method
强化学习经典算法笔记(四):时间差分算法Temporal Difference(Q-Learning算法)
强化学习经典算法笔记(五):时间差分算法Temporal Difference(SARSA算法)
强化学习经典算法笔记——深度Q值网络
到这里,我们终于来到了深度强化学习的领域了,之前的算法都是经典RL算法,它们和DRL的关系好比是机器学习和深度学习的关系。深度神经网络的引入极大地提升了强化学习算法的效率和能力,使强化学习的研究进入了新的阶段。
简介
深度强化学习的经典之作是2015年DeepMind发表在Nature的DQN论文《Human-Level Control Through Deep Reinforcement Learning》。本篇博客就讲一讲DQN的基本框架思想,并用代码实现它。
DQN属于Q-Learning算法,也是一种Value-Based算法,并不直接学习一个Policy,而是学习Critic,也就是学习如何评价当前状态的好坏,进而根据Q值选取最佳的action。因此可以将DQN中的神经网络看做是一个复杂的Q-function,本质上,它和前几篇中提到的Q-table干的事是一样的,只不过神经网络的函数拟合能力很强,它能胜任更复杂的RL任务。
我个人观点,深度强化学习的框架大致可以分为两部分,一部分是感知(Sensoring),另一部分是决策(Decision Making)。
DRL往往需要学习一个感知算法,感知真实环境的各种信息。有的感知器输出一个标量,反映当前环境或状态动作对的好坏;有的感知器则是对真实环境进行建模,将当前状态抽象成一个隐层特征,用于后续的决策算法使用,这类算法有DeepMind的World Model和PlaNet系列,我们以后都会讲到。
感知算法是对真实环境的总结和特征提取,要想做出决策,还需要一个决策算法。比如DQN中的 ϵ − g r e e d y \epsilon-greedy ϵ−greedy算法,虽然是一个比较简单的policy算法,直接采取具有最大Q值的动作作为当前策略,但是我们也可以看做是一个决策算法,它利用了上一步的感知器对环境的感知信息。
再比如,AlphaGo系列算法中,CNN负责对当前棋盘状态提取特征,给出当前胜算(也就是评估当前状态好坏),接着蒙特卡洛树搜索算法根据CNN输出的Q值计算子结点的U值,进行棋盘搜索,完成决策。
从感知和决策的角度审视深度强化学习,深度神经网络的引入提升了感知和决策两方面的效果。我们在这一篇主要讲神经网络对感知能力的提升,而将神经网络用于决策的内容放到后面去讲。但是,将神经网络用于强化学习早已有之,不过效果一直不好,直到DQN引入了几个核心技术,才将性能大大提升,即
- 卷积神经网络 CNN
- 目标网络 Target Network
- 经验回放 Experience Replay
DQN应该是第一个采用原始图像作为CNN输入进行训练的,也应该是第一个将CNN在RL发挥巨大威力的算法。DQN中的CNN采用和AlexNet类似的结构。
目标网络是DQN的一大贡献。我们知道,与环境交互具有极大的随机性,XXXXXXXXXXXXXXXXX
经验回放是DQN的另一贡献。我们知道,一个episode是一个时间关联性很强的(状态-动作-回报)序列,如果直接拿若干个episode的序列数据来训练CNN,XXXXXXXXXXXXXXXXXXXXXXX
现在让我们看看DQN完整的算法
以下操作执行N个Episode:
- 将游戏画面 s s s进行预处理,送入CNN,输出每个动作的Q值
- 根据 ϵ − g r e e d y \epsilon-greedy ϵ−greedy算法计算应该采取的动作 a = a r g m a x ( Q ( s , a , θ ) ) a=argmax(Q(s,a,\theta)) a=argmax(Q(s,a,θ))
- 执行动作 a a a,转移到下一状态 s ′ s' s′,收到环境给出的回报
- 将序列 < s , a , r , s ′ > <s,a,r,s'> <s,a,r,s′>存入经验池
- 从经验池采样一个batch的数据,训练Q Network,实际上是一个由输入预测输出的回归问题
l o s s = ( r + γ m a x a ′ Q ( s ′ , a ′ ; θ ′ ) − Q ( s , a ; θ ) ) 2 loss=(r+\gamma max_{a'}Q(s',a';\theta')-Q(s,a;\theta))^2 loss=(r+γmaxa′Q(s′,a′;θ′)−Q(s,a;θ))2 - CNN(当前网络)训练若干代之后,将其参数拷贝给目标网络。
DQN实验
本次实验采用的游戏环境是MrPacman-v0。这个游戏很简单,控制小人吃掉路上的小长方块,同时躲避怪物的接触。每吃一个小块得10分,碰到怪物就会丢掉命,一局游戏有三条命,每条命的得分是累加的。算法的目标就是取得尽可能高的分数
导入必要的环境依赖。
import numpy as np
import gym
import tensorflow as tf
from tensorflow.contrib.layers import flatten, conv2d, fully_connected
from collections import deque, Counter
import random
import matplotlib.pyplot as plt
%matplotlib inline
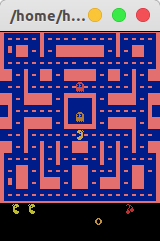
游戏环境给出的observation是210x160x3的彩色图像,如下图。
env = gym.make('MsPacman-v0')
env.render()
# env.close()
游戏的动作有九个——等待、右转、左转、向上、向下、向左移动、向右移动、向上移动和向下移动,所以我们之后要搭建的神经网络的输出也有9个。
n_outputs = env.action_space.n
# n_outputs = 9
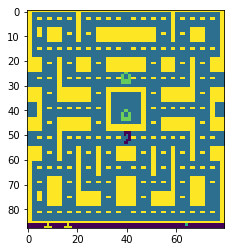
我们首先对图像进行预处理。具体包括裁剪、降采样、灰度化和提高对比度。
# color后面用于图像的锐化
color = np.array([210, 164, 74]).mean()
def preprocess_observation(obs):
'''
处理210x160x3图像
'''
# 以2为步长,截取1-176行的像素,共取88行
# 同样地,每两列取1列像素,共取80列
# img.shape = (88,80,3)
img = obs[1:176:2, ::2]
# 彩图转灰度图,即对三通道像素值取平均
img = img.mean(axis=2)
# 提高图像对比度
img[img==color] = 0
# 像素值归一化(-1,1)
img = (img - 128) / 128 - 1
return img.reshape(88,80,1)
处理过后的图像
下面来搭建DQN的核心——CNN。根据Q function的定义,Q值是评估一个状态动作对的好坏的,但是在实现算法时,状态(一个矩阵)非常适合作为CNN的输入,但是动作是一个标量,和状态同时输入CNN不好实现,所以我们实际做的是输入一个游戏状态的图像,输出所有动作的Q值。
tf.reset_default_graph()
def q_network(X, name_scope):
# Initialize layers
initializer = tf.contrib.layers.variance_scaling_initializer()
with tf.variable_scope(name_scope) as scope:
# 定义卷积操作
layer_1 = conv2d(X, num_outputs=32, kernel_size=(8,8), stride=4, padding='SAME', weights_initializer=initializer)
# summary.histogram的作用是在tensorboard中以直方图的形式可视化这个变量
tf.summary.histogram('layer_1',layer_1)
layer_2 = conv2d(layer_1, num_outputs=64, kernel_size=(4,4), stride=2, padding='SAME', weights_initializer=initializer)
tf.summary.histogram('layer_2',layer_2)
layer_3 = conv2d(layer_2, num_outputs=64, kernel_size=(3,3), stride=1, padding='SAME', weights_initializer=initializer)
tf.summary.histogram('layer_3',layer_3)
# 将2维feature map拉成向量,送入全连接层
flat = flatten(layer_3)
fc = fully_connected(flat, num_outputs=128, weights_initializer=initializer)
tf.summary.histogram('fc',fc)
# 最后一层全连接的输出是9个可能动作的Q值,注意这里没有经过激活函数,可以试一下softmax函数的效果
output = fully_connected(fc, num_outputs=n_outputs, activation_fn=None, weights_initializer=initializer)
tf.summary.histogram('output',output)
# 将网络的权重保存起来,以便拷贝给Target Network
vars = {v.name[len(scope.name):]: v for v in tf.get_collection(key=tf.GraphKeys.TRAINABLE_VARIABLES, scope=scope.name)}
return vars, output
下面创建 ϵ − g r e e d y \epsilon-greedy ϵ−greedy 策略,与之前不同,算法的 ϵ \epsilon ϵ是随着训练代数的增加而线性递减的。训练初期,策略更接近随机探索,训练后期,策略倾向于选择具有最优Q值的动作。请注意,当训练的episode数改变后,eps_decay_steps的值也要相应改变,使epsilon随着整个训练过程合理地减小。这一点在代码中也有说明。
eps_min = 0.05
eps_max = 1.0
# 每个episode约持续600-700个step
# 因此eps_decay_steps要随着num_episodes的变化而变化
eps_decay_steps = 500000
def epsilon_greedy(action, step):
'''
step = 0,epsilon=1
step = 500000,epsilon = 0.05
线性衰减
'''
epsilon = max(eps_min, eps_max - (eps_max-eps_min) * step/eps_decay_steps)
if np.random.rand() < epsilon:
# 输出随机动作epsilon_greedy
return np.random.randint(n_outputs)
else:
# 输出最优动作
return action
现在感知算法和决策算法都具备了,还差数据集。我们需要将
(
s
,
a
,
r
,
s
′
)
(s,a,r,s')
(s,a,r,s′)这样的数据存入经验池(experience replay buffer)。buffer不能用简单的list来充当,否则随着训练代数的增加,有可能内存会溢出。我们希望buffer具有线性表的各种特点,支持入队、出对,能设置最大长度。这个功能Python已经帮我们实现了,就是deque。
# from collections import deque, Counter
buffer_len = 20000
exp_buffer = deque(maxlen=buffer_len)
有了经验池,下一步就需要从经验池中取出数据,用于训练CNN。所以还要写一个sample_memories函数。
def sample_memories(batch_size):
# permutation的作用:
# 将[0, len(exp_buffer)-1] 的整数乱序排列
# [:batch_size]取打乱顺序的buffer中1个batch的数据
perm_batch = np.random.permutation(len(exp_buffer))[:batch_size]
mem = np.array(exp_buffer)[perm_batch]
# 一条数据中包括(s,a,s',r,done) 5个数据
return mem[:,0], mem[:,1], mem[:,2], mem[:,3], mem[:,4]
下面我们需要配置网络训练相关的超参数。
num_episodes = 800 # 一共玩800盘游戏
batch_size = 48 # 每次从经验池拿出48个样本训练CNN
input_shape = (None, 88, 80, 1) # 网络输入尺寸,第1维是batch
learning_rate = 0.001
X_shape = (None, 88, 80, 1)
discount_factor = 0.97 # 折扣率,表示未来回报对现在的重要程度
global_step = 0 # 将每局游戏走的步数相累加,就是全局步数
copy_steps = 100 # 每100代,当前网络向Target Network拷贝参数
steps_train = 4 # 设定游戏中每走4步,就训练CNN一次
start_steps = 2000 # 训练初期,经验池不满,所以前2000代先收集数据,不进行训练
# 在当前目录下新建logs文件夹,记录训练数据
logdir = 'logs'
tf.reset_default_graph()
# 定义送入CNN数据的接口
X = tf.placeholder(tf.float32, shape=X_shape)
# 用一个布尔值控制训练/非训练状态
in_training_mode = tf.placeholder(tf.bool)
创建2个CNN,一个Main CNN,一个Target CNN。
# main Q network
mainQ, mainQ_outputs = q_network(X, 'mainQ')
# target Q network
targetQ, targetQ_outputs = q_network(X, 'targetQ')
计算Q值。前面讲到,网络输入s,输出9个动作分别的Q值,也就是1个9维向量,但实际上我们希望的是输入(s,a),输出Q(s,a),所以需要在9维向量中取出我们真正想要的那个值,也就是数据 ( s , a , r , s ′ ) (s,a,r,s') (s,a,r,s′)中真正的a对应的Q值。
为此我们定义X_action接口,对应的是exp buffer中的action,当然其长度是batch_size,因为我们在训练中一次取batch_size个样本,每1个元素都表示当时采取的动作(0-8)。将action从0-8转换成one-hot码,如
(
0
,
0
,
0
,
1
,
0
,
0
,
0
,
0
,
0
)
(0,0,0,1,0,0,0,0,0)
(0,0,0,1,0,0,0,0,0),然后将CNN输出的9维向量,比如
(
1
,
2
,
3
,
4
,
5
,
6
,
7
,
8
,
9
)
(1,2,3,4,5,6,7,8,9)
(1,2,3,4,5,6,7,8,9)与one-hot相乘,就得
(
0
,
0
,
0
,
4
,
0
,
0
,
0
,
0
,
0
)
(0,0,0,4,0,0,0,0,0)
(0,0,0,4,0,0,0,0,0),再求和得到4。到这里,我们算出了数据样本
(
s
,
a
,
r
,
s
′
)
(s,a,r,s')
(s,a,r,s′)中
(
s
,
a
)
(s,a)
(s,a)的CNN估值。将这个值记为Q_action。
# X_action 长度 = batch_size(48), 每1个元素都表示当时采取的动作0-8
X_action = tf.placeholder(tf.int32, shape=(None,))
# Q_action 长度 = batch_size
# Q_action计算的是样本中(s,a)的CNN估计的Q值
# (0,0,0,1,0,0,0,0,0) * (1,2,3,4,5,6,7,8,9) = (0,0,0,4,0,0,0,0,0) ==sum==> 4
# one_hot(X_action,9) * targetQ_outputs ====== tf.reduce_sum ======>Q_action
Q_action = tf.reduce_sum(targetQ_outputs * tf.one_hot(X_action, n_outputs), axis=-1, keep_dims=True)
定义拷贝参数的操作
copy_op = [tf.assign(main_name, targetQ[var_name]) for var_name, main_name in mainQ.items()]
copy_target_to_main = tf.group(*copy_op)
定义优化算法和loss function
# y相当于r+γ*max(Q(s,a))
y = tf.placeholder(tf.float32, shape=(None,1))
# 训练任务相当于一个回归问题,让CNN计算出来的值Q_action越来越接近r+γ*max(Q(s,a))
loss = tf.reduce_mean(tf.square(y - Q_action))
# Adam算法用于优化
optimizer = tf.train.AdamOptimizer(learning_rate)
training_op = optimizer.minimize(loss)
# 全局参数的初始化器
init = tf.global_variables_initializer()
loss_summary = tf.summary.scalar('LOSS', loss)
# summary.merge_all()可以将几乎所有数据放在tensorboard上显示
merge_summary = tf.summary.merge_all()
# 写入训练记录文件
file_writer = tf.summary.FileWriter(logdir, tf.get_default_graph())
下面就是正式开始训练的时候了。
with tf.Session() as sess:
init.run() # 参数初始化
# for循环持续num_episode盘游戏
for i in range(num_episodes):
done = False # 该局游戏是否结束的标志
obs = env.reset() # 初始化游戏环境
epoch = 0 # 在游戏中每走1步 = 一个global_step = 一个epoch
episodic_reward = 0 # 每局游戏的总回报
actions_counter = Counter() # 一局游戏中0-8共9种动作分别执行的次数
episodic_loss = [] # 记录一局游戏中每次训练CNN时的loss
# 进入循环,直到游戏结束
while not done:
# 可视化游戏界面
env.render()
# 对游戏界面做图像预处理,obs.shape=(88,80,1)
obs = preprocess_observation(obs)
# 将当前obs送入CNN得到每个动作的Q值
actions = mainQ_outputs.eval(feed_dict={X:[obs], in_training_mode:False})
# 选Q值最大的action
action = np.argmax(actions, axis=-1)
# 记录当前选择的action
actions_counter[str(action)] += 1
# 利用epsilon-greedy策略选择动作
action = epsilon_greedy(action, global_step)
# 执行动作,得到下一个状态、回报、是否结束的标志
next_obs, reward, done, _ = env.step(action)
# 将(s,a,r,s',done)作为一条exp存入经验池
exp_buffer.append([obs, action, preprocess_observation(next_obs), reward, done])
# 前start_steps(2000)次迭代只搜集数据,不训练CNN
# 每4次迭代训练一次CNN,steps_train=4
if global_step % steps_train == 0 and global_step > start_steps:
# 从经验池中采样batch_size条数据
o_obs, o_act, o_next_obs, o_rew, o_done = sample_memories(batch_size)
# 当前状态,shape=(batch_size, 88, 80, 1)
o_obs = [x for x in o_obs]
# 下一状态
o_next_obs = [x for x in o_next_obs]
# 由o_next_obs计算的下一状态时,9个动作的Q值,shape=(batch_size, 9)
next_act = mainQ_outputs.eval(feed_dict={X:o_next_obs, in_training_mode:False})
# 利用时间差分算法计算当前真实回报,当游戏结束时刻,只有第1项o_rew,而无未来收益discount_factor * np.max(next_act, axis=-1)
y_batch = o_rew + discount_factor * np.max(next_act, axis=-1) * (1-o_done)
# 保存所有训练过程中数据
mrg_summary = merge_summary.eval(feed_dict={X:o_obs, y:np.expand_dims(y_batch, axis=-1), X_action:o_act, in_training_mode:False})
file_writer.add_summary(mrg_summary, global_step)
# 计算loss,训练CNN
train_loss, _ = sess.run([loss, training_op], feed_dict={X:o_obs, y:np.expand_dims(y_batch, axis=-1), X_action:o_act, in_training_mode:True})
episodic_loss.append(train_loss)
# print(sess.run(X_action,feed_dict={X_action:o_act}))
# print(sess.run(Q_action,feed_dict={X_action:o_act,targetQ_outputs:next_act}))
# 经过100次迭代,将main Q network权重拷贝给target Q network
if (global_step+1) % copy_steps == 0 and global_step > start_steps:
copy_target_to_main.run()
obs = next_obs
epoch += 1
global_step += 1
episodic_reward += reward
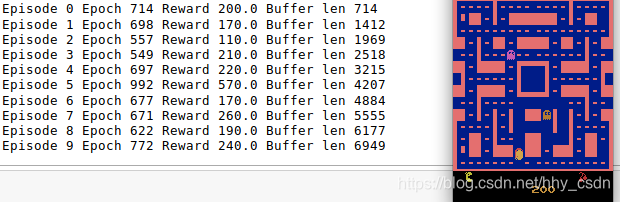
print('Episode',i,'Epoch', epoch, 'Reward', episodic_reward,'Buffer len',len(exp_buffer))
代码完整版
import numpy as np
import gym
import tensorflow as tf
from tensorflow.contrib.layers import flatten, conv2d, fully_connected
from collections import deque, Counter
import random
import matplotlib.pyplot as plt
%matplotlib inline
env = gym.make('MsPacman-v0')
n_outputs = env.action_space.n
# n_outputs = 9
# color后面用于图像的锐化
color = np.array([210, 164, 74]).mean()
def preprocess_observation(obs):
'''
处理210x160x3图像
'''
# 以2为步长,截取1-176行的像素,共取88行
# 同样地,每两列取1列像素,共取80列
# img.shape = (88,80,3)
img = obs[1:176:2, ::2]
# 彩图转灰度图,即对三通道像素值取平均
img = img.mean(axis=2)
# 提高图像对比度
img[img==color] = 0
# 像素值归一化(-1,1)
img = (img - 128) / 128 - 1
return img.reshape(88,80,1)
tf.reset_default_graph()
def q_network(X, name_scope):
# Initialize layers
initializer = tf.contrib.layers.variance_scaling_initializer()
with tf.variable_scope(name_scope) as scope:
# 定义卷积操作
layer_1 = conv2d(X, num_outputs=32, kernel_size=(8,8), stride=4, padding='SAME', weights_initializer=initializer)
# summary.histogram的作用是在tensorboard中以直方图的形式可视化这个变量
tf.summary.histogram('layer_1',layer_1)
layer_2 = conv2d(layer_1, num_outputs=64, kernel_size=(4,4), stride=2, padding='SAME', weights_initializer=initializer)
tf.summary.histogram('layer_2',layer_2)
layer_3 = conv2d(layer_2, num_outputs=64, kernel_size=(3,3), stride=1, padding='SAME', weights_initializer=initializer)
tf.summary.histogram('layer_3',layer_3)
# 将2维feature map拉成向量,送入全连接层
flat = flatten(layer_3)
fc = fully_connected(flat, num_outputs=128, weights_initializer=initializer)
tf.summary.histogram('fc',fc)
# 最后一层全连接的输出是9个可能动作的Q值,注意这里没有经过激活函数,可以试一下softmax函数的效果
output = fully_connected(fc, num_outputs=n_outputs, activation_fn=None, weights_initializer=initializer)
tf.summary.histogram('output',output)
# 将网络的权重保存起来,以便拷贝给Target Network
vars = {v.name[len(scope.name):]: v for v in tf.get_collection(key=tf.GraphKeys.TRAINABLE_VARIABLES, scope=scope.name)}
return vars, output
eps_min = 0.05
eps_max = 1.0
# 每个episode约持续600-700个step
# 因此eps_decay_steps要随着num_episodes的变化而变化
eps_decay_steps = 500000
def epsilon_greedy(action, step):
'''
step = 0,epsilon=1
step = 500000,epsilon = 0.05
线性衰减
'''
epsilon = max(eps_min, eps_max - (eps_max-eps_min) * step/eps_decay_steps)
if np.random.rand() < epsilon:
# 输出随机动作epsilon_greedy
return np.random.randint(n_outputs)
else:
# 输出最优动作
return action
# from collections import deque, Counter
buffer_len = 20000
exp_buffer = deque(maxlen=buffer_len)
def sample_memories(batch_size):
# permutation的作用:
# 将[0, len(exp_buffer)-1] 的整数乱序排列
# [:batch_size]取打乱顺序的buffer中1个batch的数据
perm_batch = np.random.permutation(len(exp_buffer))[:batch_size]
mem = np.array(exp_buffer)[perm_batch]
# 一条数据中包括(s,a,s',r,done) 5个数据
return mem[:,0], mem[:,1], mem[:,2], mem[:,3], mem[:,4]
num_episodes = 800 # 一共玩800盘游戏
batch_size = 48 # 每次从经验池拿出48个样本训练CNN
input_shape = (None, 88, 80, 1) # 网络输入尺寸,第1维是batch
learning_rate = 0.001
X_shape = (None, 88, 80, 1)
discount_factor = 0.97 # 折扣率,表示未来回报对现在的重要程度
global_step = 0 # 将每局游戏走的步数相累加,就是全局步数
copy_steps = 100 # 每100代,当前网络向Target Network拷贝参数
steps_train = 4 # 设定游戏中每走4步,就训练CNN一次
start_steps = 2000 # 训练初期,经验池不满,所以前2000代先收集数据,不进行训练
# 在当前目录下新建logs文件夹,记录训练数据
logdir = 'logs'
tf.reset_default_graph()
# 定义送入CNN数据的接口
X = tf.placeholder(tf.float32, shape=X_shape)
# 用一个布尔值控制训练/非训练状态
in_training_mode = tf.placeholder(tf.bool)
# main Q network
mainQ, mainQ_outputs = q_network(X, 'mainQ')
# target Q network
targetQ, targetQ_outputs = q_network(X, 'targetQ')
# X_action 长度 = batch_size(48), 每1个元素都表示当时采取的动作0-8
X_action = tf.placeholder(tf.int32, shape=(None,))
# Q_action 长度 = batch_size
# Q_action计算的是样本中(s,a)的CNN估计的Q值
# (0,0,0,1,0,0,0,0,0) * (1,2,3,4,5,6,7,8,9) = (0,0,0,4,0,0,0,0,0) ==sum==> 4
# one_hot(X_action,9) * targetQ_outputs ====== tf.reduce_sum ======>Q_action
Q_action = tf.reduce_sum(targetQ_outputs * tf.one_hot(X_action, n_outputs), axis=-1, keep_dims=True)
copy_op = [tf.assign(main_name, targetQ[var_name]) for var_name, main_name in mainQ.items()]
copy_target_to_main = tf.group(*copy_op)
# y相当于r+γ*max(Q(s,a))
y = tf.placeholder(tf.float32, shape=(None,1))
# 训练任务相当于一个回归问题,让CNN计算出来的值Q_action越来越接近r+γ*max(Q(s,a))
loss = tf.reduce_mean(tf.square(y - Q_action))
# Adam算法用于优化
optimizer = tf.train.AdamOptimizer(learning_rate)
training_op = optimizer.minimize(loss)
# 全局参数的初始化器
init = tf.global_variables_initializer()
loss_summary = tf.summary.scalar('LOSS', loss)
# summary.merge_all()可以将几乎所有数据放在tensorboard上显示
merge_summary = tf.summary.merge_all()
# 写入训练记录文件
file_writer = tf.summary.FileWriter(logdir, tf.get_default_graph())
with tf.Session() as sess:
init.run() # 参数初始化
# for循环持续num_episode盘游戏
for i in range(num_episodes):
done = False # 该局游戏是否结束的标志
obs = env.reset() # 初始化游戏环境
epoch = 0 # 在游戏中每走1步 = 一个global_step = 一个epoch
episodic_reward = 0 # 每局游戏的总回报
actions_counter = Counter() # 一局游戏中0-8共9种动作分别执行的次数
episodic_loss = [] # 记录一局游戏中每次训练CNN时的loss
# 进入循环,直到游戏结束
while not done:
# 可视化游戏界面
env.render()
# 对游戏界面做图像预处理,obs.shape=(88,80,1)
obs = preprocess_observation(obs)
# 将当前obs送入CNN得到每个动作的Q值
actions = mainQ_outputs.eval(feed_dict={X:[obs], in_training_mode:False})
# 选Q值最大的action
action = np.argmax(actions, axis=-1)
# 记录当前选择的action
actions_counter[str(action)] += 1
# 利用epsilon-greedy策略选择动作
action = epsilon_greedy(action, global_step)
# 执行动作,得到下一个状态、回报、是否结束的标志
next_obs, reward, done, _ = env.step(action)
# 将(s,a,r,s',done)作为一条exp存入经验池
exp_buffer.append([obs, action, preprocess_observation(next_obs), reward, done])
# 前start_steps(2000)次迭代只搜集数据,不训练CNN
# 每4次迭代训练一次CNN,steps_train=4
if global_step % steps_train == 0 and global_step > start_steps:
# 从经验池中采样batch_size条数据
o_obs, o_act, o_next_obs, o_rew, o_done = sample_memories(batch_size)
# 当前状态,shape=(batch_size, 88, 80, 1)
o_obs = [x for x in o_obs]
# 下一状态
o_next_obs = [x for x in o_next_obs]
# 由o_next_obs计算的下一状态时,9个动作的Q值,shape=(batch_size, 9)
next_act = mainQ_outputs.eval(feed_dict={X:o_next_obs, in_training_mode:False})
# 利用时间差分算法计算当前真实回报,当游戏结束时刻,只有第1项o_rew,而无未来收益discount_factor * np.max(next_act, axis=-1)
y_batch = o_rew + discount_factor * np.max(next_act, axis=-1) * (1-o_done)
# 保存所有训练过程中数据
mrg_summary = merge_summary.eval(feed_dict={X:o_obs, y:np.expand_dims(y_batch, axis=-1), X_action:o_act, in_training_mode:False})
file_writer.add_summary(mrg_summary, global_step)
# 计算loss,训练CNN
train_loss, _ = sess.run([loss, training_op], feed_dict={X:o_obs, y:np.expand_dims(y_batch, axis=-1), X_action:o_act, in_training_mode:True})
episodic_loss.append(train_loss)
# print(sess.run(X_action,feed_dict={X_action:o_act}))
# print(sess.run(Q_action,feed_dict={X_action:o_act,targetQ_outputs:next_act}))
# 经过100次迭代,将main Q network权重拷贝给target Q network
if (global_step+1) % copy_steps == 0 and global_step > start_steps:
copy_target_to_main.run()
obs = next_obs
epoch += 1
global_step += 1
episodic_reward += reward
print('Episode',i,'Epoch', epoch, 'Reward', episodic_reward,'Buffer len',len(exp_buffer))
开始训练,如下图。大功告成,下一篇讲讲DQN实验的细节,如何在Tensorboard上查看训练日志,以及如何搭建更复杂的模型以提高性能。