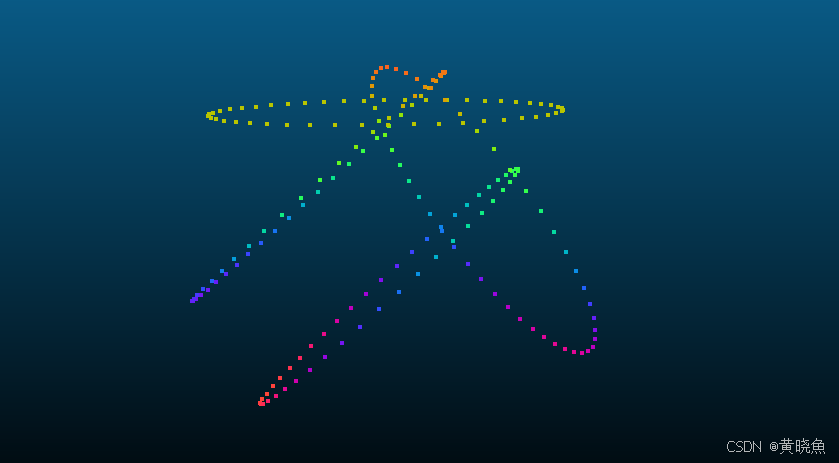
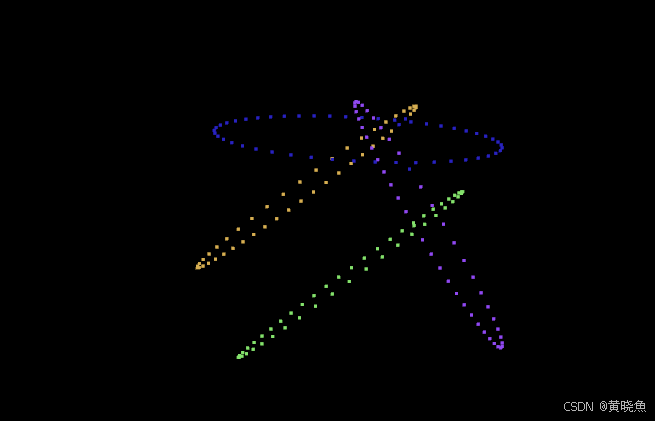
测试效果
简介
没有
测试代码
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
cloud = PCL_Common::K_ReadPcdData("D:\\1_Kita\\Circle3DCloud.pcd");
PCL_Common::K_ShowCloud(cloud, 2);
// -------------------------------定义所需容器--------------------------------
std::vector<int> totalInners;
std::vector<int> indices(cloud->points.size());
std::iota(std::begin(indices), std::end(indices), (int)0);
float dist = 0.1; // 距离阈值
float minPointNum = 10; // 最小点数
in