使用easy_handeye手眼标定缺少rqt_easy_handeye窗口
之前操作
相关配置已参考【手眼标定】ros / easy_handeye + ur5 + realsense d435i - 知乎进行了配置
使用easy_hand_eye进行手眼标定,运行以下launch文件
roslaunch easy_handeye ur10e_handeye_calibration.launch
问题:
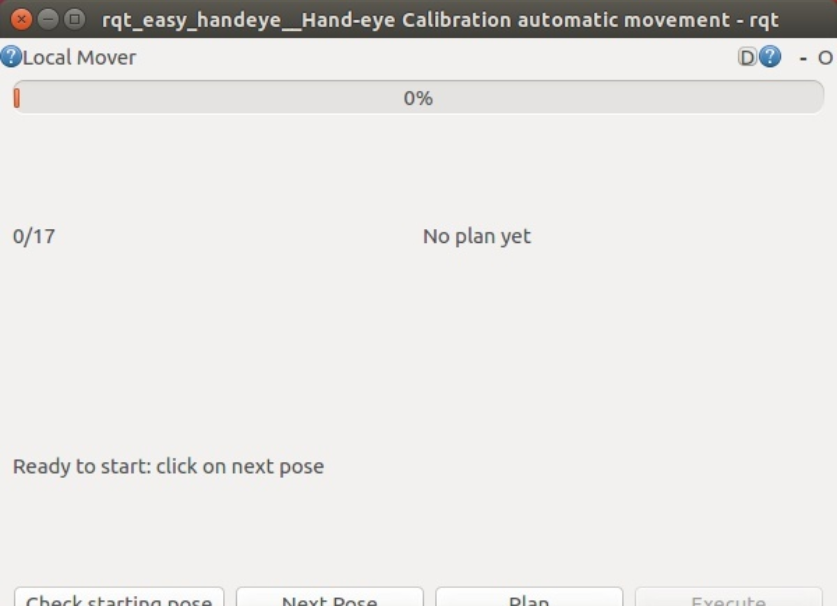
不显示rqt_easy_handeye的相关界面,无法进行标定,下图界面没有显示:
解决办法
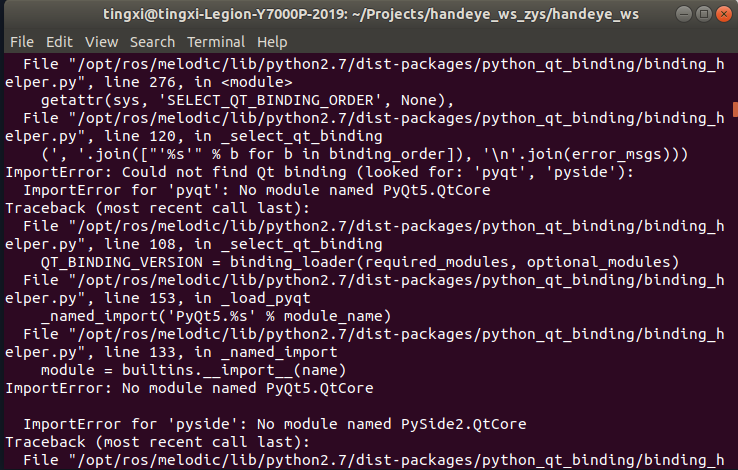
查看终端的输出,可以看到有如下报错信息:
错误的解决一
使用sudo安装pyqt5的包
sudo apt install python-pyqt5
sudo apt install python3-pyqt5
使用上述命令之后,界面不显示的问题没有解决
错误的解决二
因为使用pip安装pyqt5只能在python3的环境下安装,所以切换到python3的环境中,使用如下命令:
pip install pyqt5
但是ROS的功能包在python3的环境下运行会报错
正确的解决办法
在python2的环境下,使用pip安装PySide2这个包
pip install PySide2
安装之后,rqt_easy_handeye的界面可以正常显示了,但是又看到下面的一个错
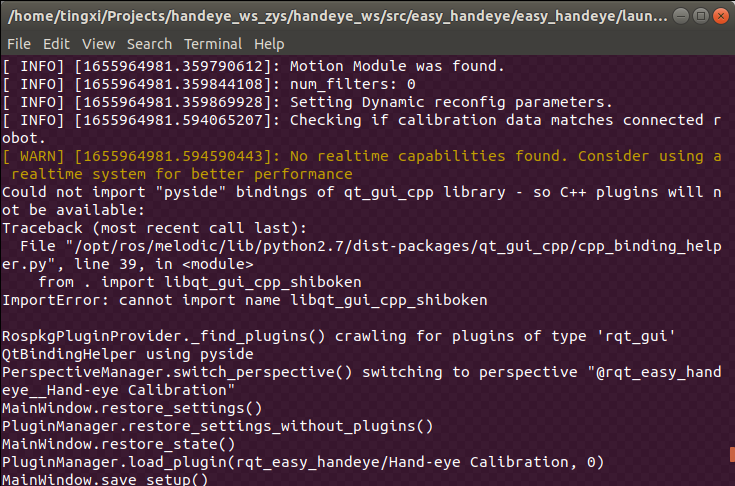
然后找下下述博客,发现该问题是正常的!现在可以去标定了
参考文献
Warning “Could not import “pyside” bindings of qt_gui_cpp library” when opening rqt_gui with pyside · Issue #7 · ros-visualization/rqt
【手眼标定】ros / easy_handeye + ur5 + realsense d435i - 知乎