ROS参数服务器增删改查实操C++
ROS通信机制包括话题通信、服务通信和参数服务器三种通信方式,各原理及代码实现如下表
| 功能 | 博客链接 | 说明 |
|---|---|---|
| VScode配置 ROS 环境 | VScode创建ROS项目 ROS集成开发环境 | 使用VScode使用配置了ROS开发环境,实现ROS开发的第一步 |
| 话题通信理论 | ROS话题通信流程理论 | 介绍了话题通信机制的原理 |
| ROS话题通信机制实操C++ | ROS话题通信机制实操C++ | 手把手的用C++实现了话题通信机制 |
| ROS话题通信机制实操Python | ROS话题通信机制实操Python | 手把手的用Python实现了话题通信机制 |
| ROS话题通信流程自定义msg格式 | ROS话题通信流程自定义msg格式 | 介绍了如何准备话题通信机制自定义msg数据格式,及相关配置 |
| ROS话题通信机制自定义msg实战C++ | ROS话题通信机制自定义msg实战C++ | 手把手的用C++实现了话题通信机制自定义msg数据通信 |
| ROS话题通信机制自定义msg实战Python | ROS话题通信机制自定义msg实战Python | 手把手的用Python实现了话题通信机制自定义msg数据通信 |
| 服务通信理论 | ROS服务通信流程理论 | 介绍了服务通信机制的原理 |
| ROS服务通信自定义srv | ROS服务通信自定义srv | 介绍了如何准备服务通信机制自定义srv数据格式,及相关配置 |
| ROS服务通信机制实操C++ | ROS服务通信机制实操C++ | 手把手的用C++实现了服务通信机制 |
| ROS服务通信机制实操Python | ROS服务通信机制实操Python | 手把手的用Python实现了话题通信机制 |
| 参数服务器理论 | ROS参数服务器理论模型 | 介绍了参数服务器的原理 |
| ROS参数服务器增删改查实操C++ | ROS参数服务器增删改查实操C++ | 用 C++ 实现了参数服务器的的增删改查操作 |
| ROS参数服务器增删改查实操Python | ROS参数服务器增删改查实操Python | 用 Python 实现了参数服务器的的增删改查操作 |
在 C++ 中实现参数服务器数据的增删改查,可以通过两套 API 实现:
-
ros::NodeHandle
-
ros::param
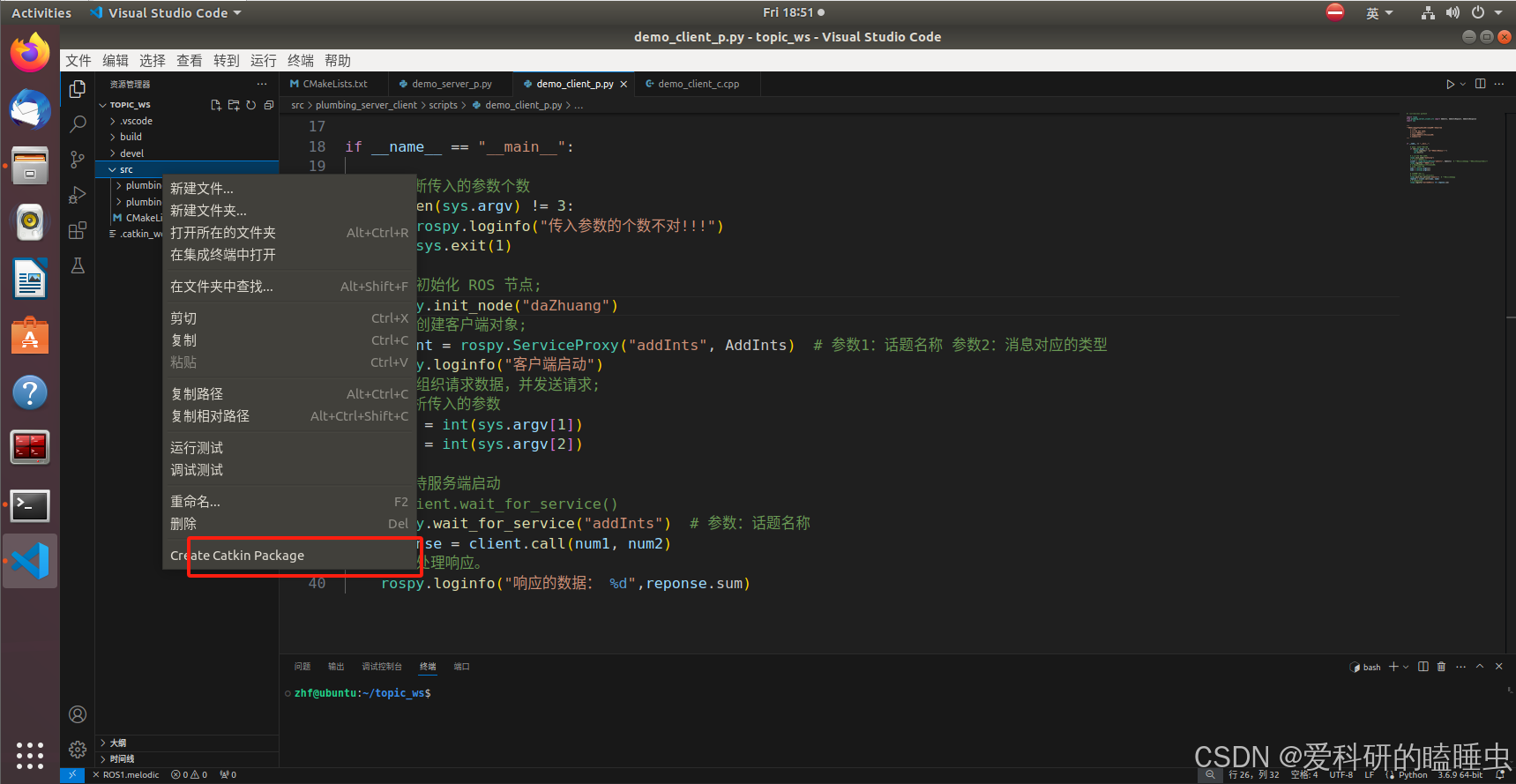
创建功能包
-
选定 src 右击 —>
create catkin package
-
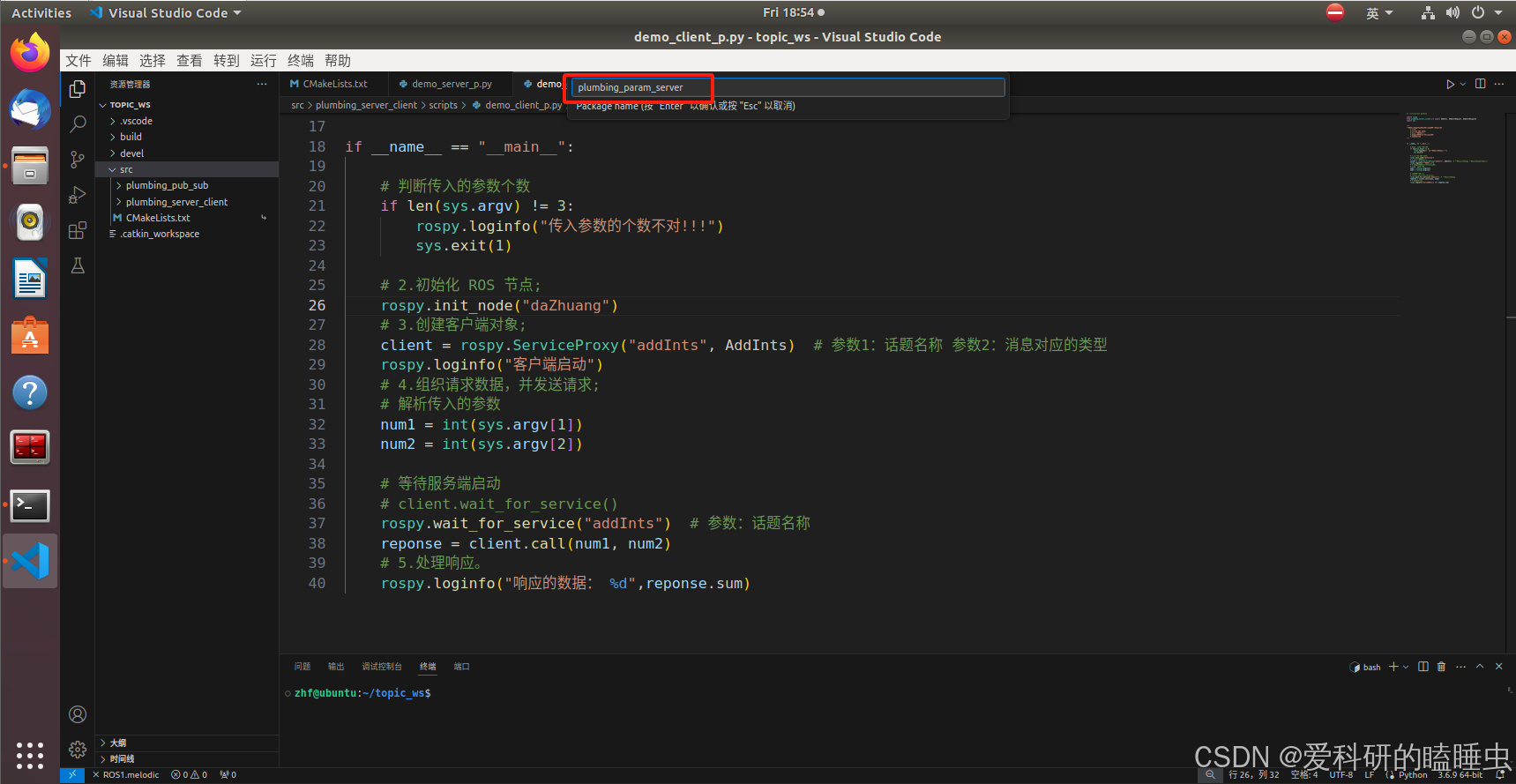
创建一个
pluming_param_server功能包 -
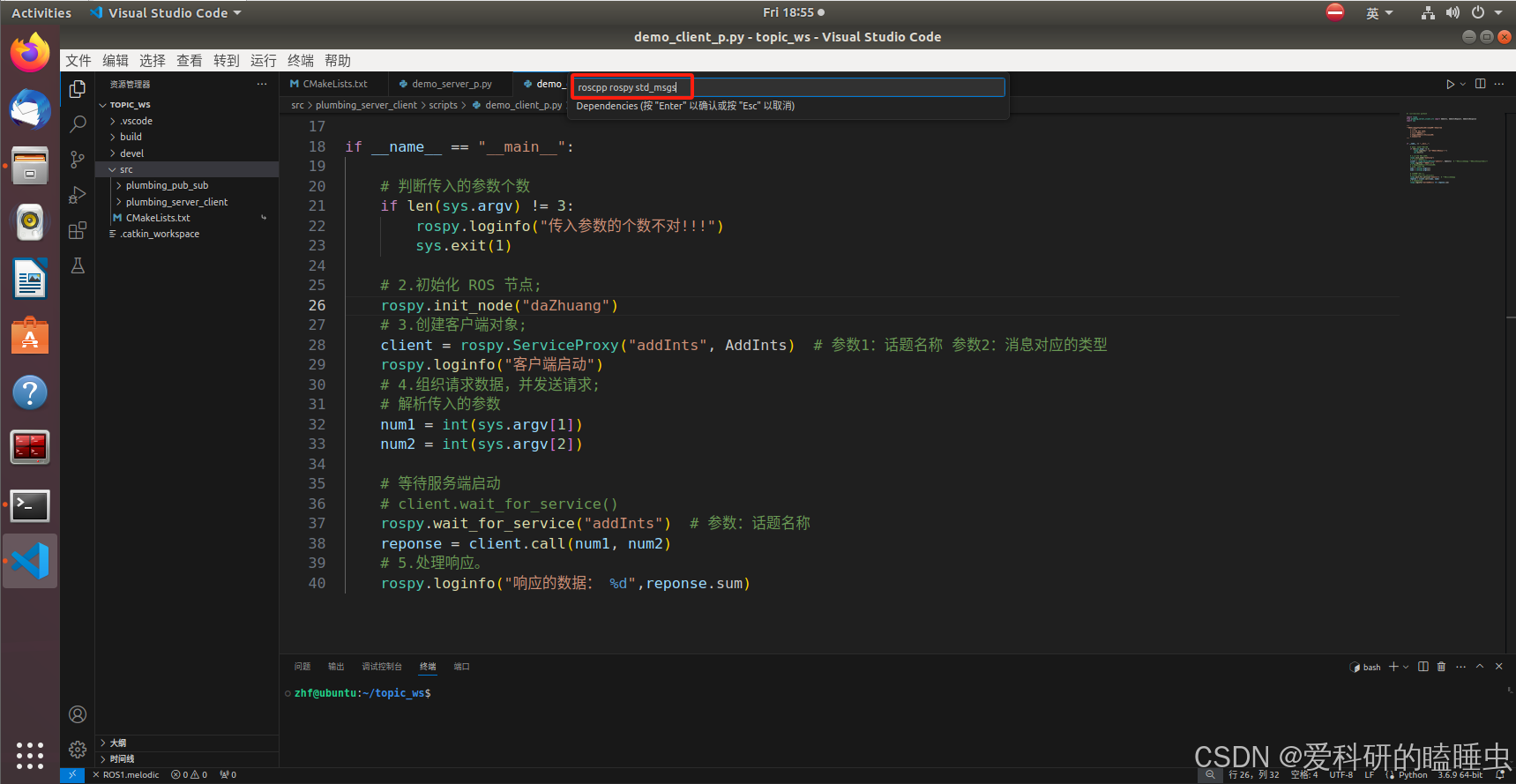
使用
roscpp rospy std_msgs作为依赖库 -
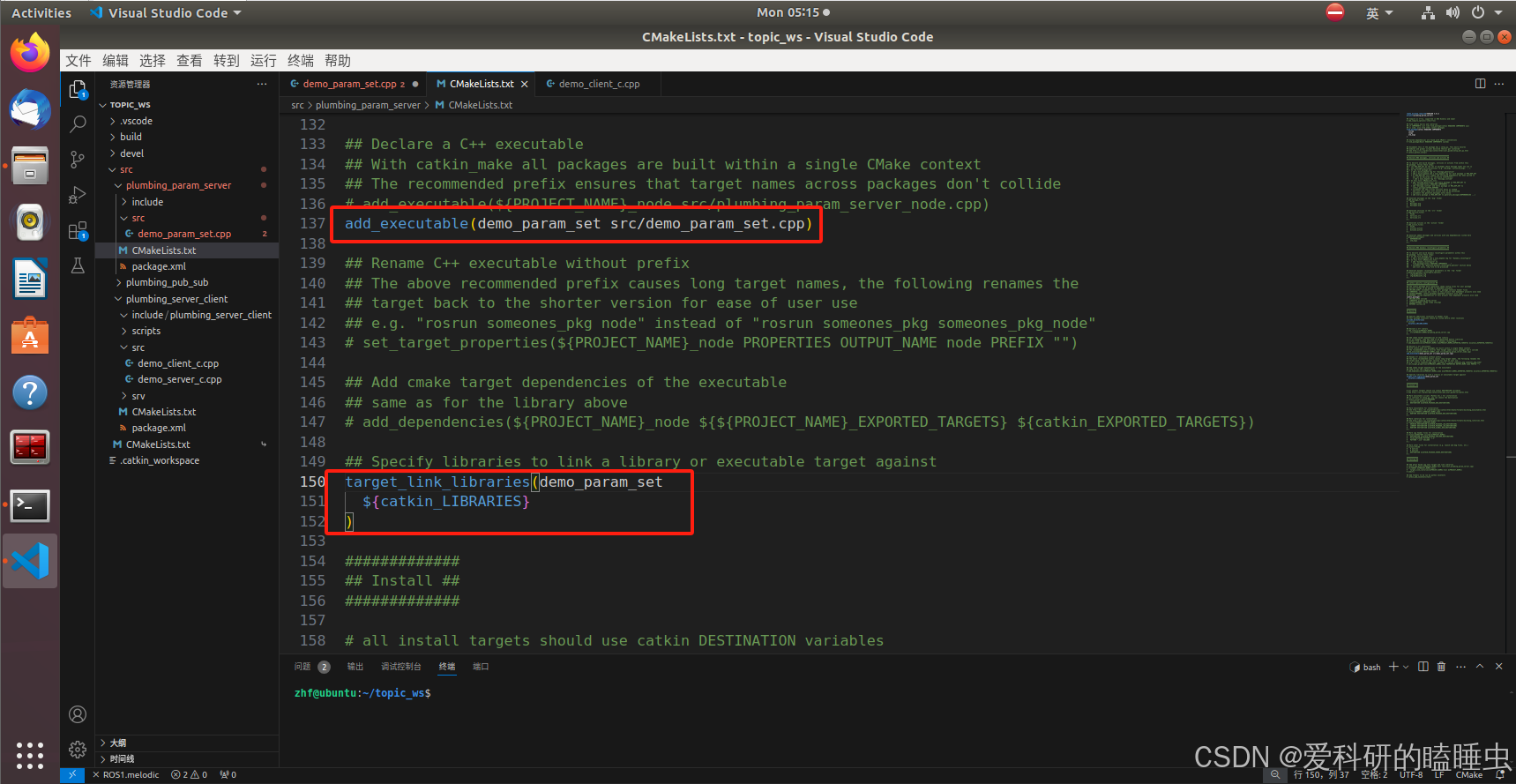
编辑配置文件
修改 plumbing_param_server 功能包下的CMakeLists.txt,找到add_executable和target_link_libraries,修改成如图所示:
参数服务器新增(修改)参数
-
新增方法,调用API,设置的格式
-
ros::NodeHandle
ros::NodeHandle nh; nh.setParam("键",值); //整型 -
ros::param
ros::param::set("键","值");
-
-
代码实现
#include "ros/ros.h" /* 参数服务器操作之新增与修改(二者API一样)_C++实现: 在 roscpp 中提供了两套 API 实现参数操作 ros::NodeHandle setParam("键",值) ros::param set("键","值") 示例:分别设置整形、浮点、字符串、bool、列表、字典等类型参数 修改(相同的键,不同的值) */ int main(int argc, char *argv[]) { setlocale(LC_ALL, ""); // 设置中文输出 ros::init(argc, argv, "set_param_c"); std::vector<std::string> stus; stus.push_back("lishi"); stus.push_back("zhf"); std::map<std::string,std::string> friends; friends["zeng"] = "hua"; friends["li"] = "cui"; // ---------------------------NodeHandle-------------------------- ros::NodeHandle nh; nh.setParam("nh_int",10); //整型 nh.setParam("nh_double",3.14); //浮点型 nh.setParam("nh_bool",true); //bool nh.setParam("nh_string","hello NodeHandle"); //字符串 nh.setParam("nh_vector",stus); // vector nh.setParam("nh_map",friends); // map //修改演示(相同的键,不同的值) nh.setParam("nh_int",10000); // ---------------------------param------------------------------- ros::param::set("param_int",20); ros::param::set("param_double",3.14); ros::param::set("param_string","Hello Param"); ros::param::set("param_bool",false); ros::param::set("param_vector",stus); ros::param::set("param_map",friends); //修改演示(相同的键,不同的值) ros::param::set("param_int",20000); return 0; } -
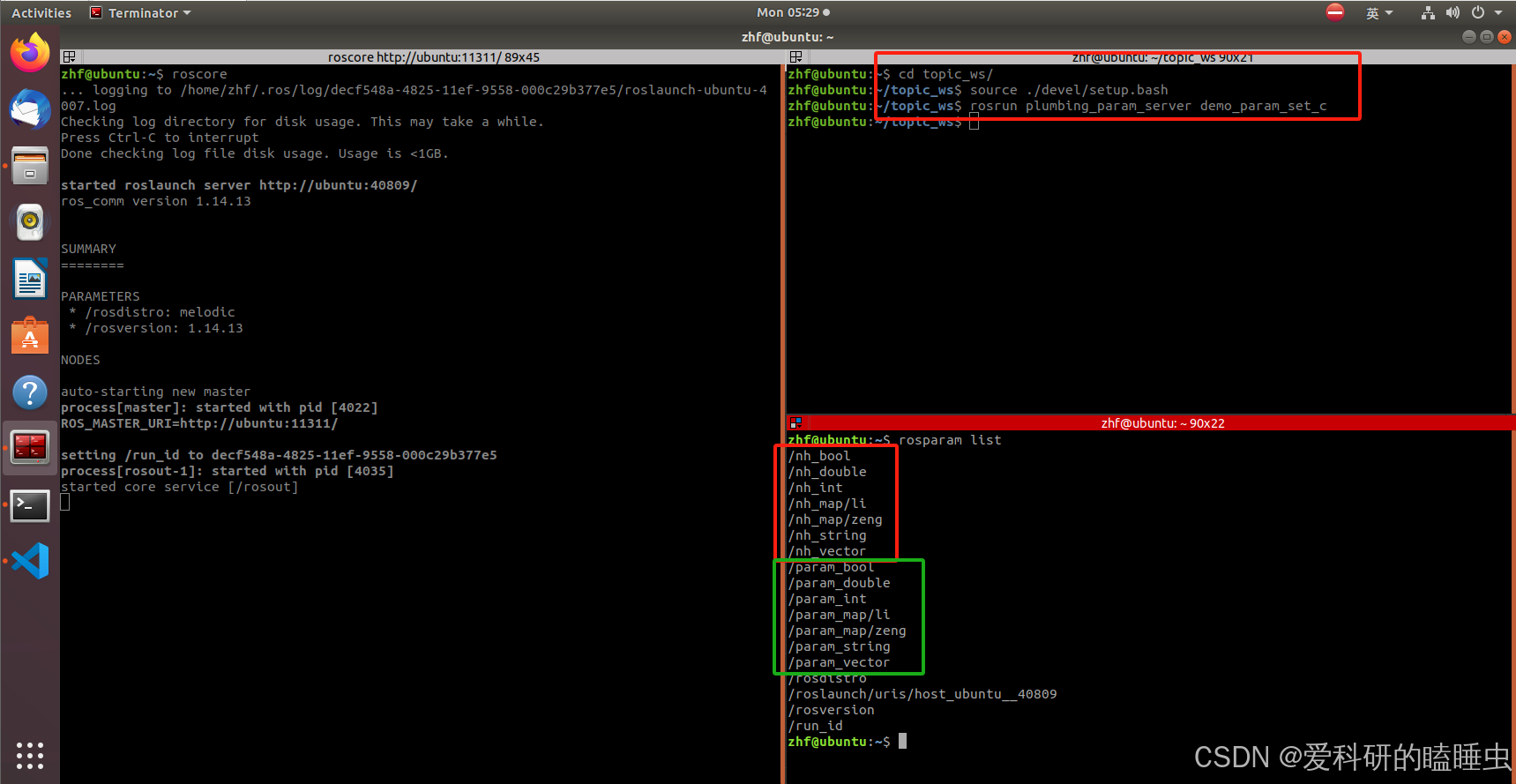
查看设置的参数
开启一个Terminal,运行 roscore 命令;再开启一个新的Terminal,运行source ./devel/setup.bash rosrun plumbing_param_server demo_param_set_c;再开启一个Terminal,运行rosparam list,查看设置的参数
修改参数与新增参数相同,设置不同值就可以
参数服务器获取参数
-
查看参数
-
ros::NodeHandle
-
param(“键”,“默认值”)
键存在,返回对应的键的值,否则返回默认值ros::NodeHandle nh; int res = nh.param("键","默认值"); // 键存在,返回对应的键的值,否则返回默认值 -
getParam(“键”, get_param_int)
如果键存在,则返回true,并将结果赋给get_param_int;如果键不存在,返回false,并不赋值给get_param_intros::NodeHandle nh; int get_param_int bool flag = nh.getParam("键", get_param_int); // 如果键存在,则返回true,并将结果赋给get_param_int;如果键不存在,返回false,并不赋值给get_param_int if (flag) { ROS_INFO("getParam 获取结果:%d", get_param_int); } else { ROS_INFO("查询的变量不存在!!!"); } -
getParamCached(“键”, get_param_int2)
是对getParam的优化,提高变量获取效率
如果键存在,则返回true,并将结果赋给get_param_int;如果键不存在,返回false,并不赋值给 get_param_intros::NodeHandle nh; int get_param_int2 bool flag = nh.getParamCached("键", get_param_int2); // 如果键存在,则返回true,并将结果赋给get_param_int2;如果键不存在,返回false,并不赋值给get_param_int2 if (flag) { ROS_INFO("getParamCached 获取结果:%d", get_param_int2); } else { ROS_INFO("查询的变量不存在!!!"); } -
getParamNames(name)
获取服务器种所有的键,存储在参数name中std::vector<std::string> names; nh.getParamNames(names); // 获取服务器种所有的键,并存在name中 for (auto &&name : names) { ROS_INFO("查询到的键为 %s",name.c_str()); } -
hasParam(“键”)
判断某个键是否存在,存在返回true,不存在返回falsebool flag = nh.hadParam("键"); // 判断某个键是否存在,存在返回true,不存在返回false -
searchParam(“键”,key)
如果键存在,并将键名赋值给 key;如果键不存在,并不赋值给 keystd::string key; nh.searchParam("nh_int",key); ROS_INFO("搜索键:%s", key.c_str());
-
-
ros::param
与NodeHandle类似
-
-
代码实现
#include "ros/ros.h" /* 参数服务器操作之查询_C++实现: 在 roscpp 中提供了两套 API 实现参数操作 ros::NodeHandle param(键,默认值) 存在,返回对应结果,否则返回默认值 getParam(键,存储结果的变量) 存在,返回 true,且将值赋值给参数2 若果键不存在,那么返回值为 false,且不为参数2赋值 getParamCached(键,存储结果的变量)--提高变量获取效率 存在,返回 true,且将值赋值给参数2 如果键不存在,那么返回值为 false,且不为参数2赋值 getParamNames(std::vector<std::string>) 获取所有的键,并存储在参数 vector 中 hasParam(键) 是否包含某个键,存在返回 true,否则返回 false searchParam(参数1,参数2) 搜索键,参数1是被搜索的键,参数2存储搜索结果的变量 ros::param ----- 与 NodeHandle 类似 */ int main(int argc, char *argv[]) { setlocale(LC_ALL,""); ros::init(argc,argv,"get_param"); // ------------------------------------NodeHandle-------------------------- ros::NodeHandle nh; // 1.param 函数 int res1 = nh.param("nh_int",100); // 键存在 int res2 = nh.param("nh_int2",100); // 键不存在 ROS_INFO("param获取结果:%d,%d",res1,res2); // 2.getParam 函数 int nh_int_value; double nh_double_value; bool nh_bool_value; std::string nh_string_value; std::vector<std::string> stus; std::map<std::string, std::string> friends; nh.getParam("nh_int",nh_int_value); nh.getParam("nh_double",nh_double_value); nh.getParam("nh_bool",nh_bool_value); nh.getParam("nh_string",nh_string_value); nh.getParam("nh_vector",stus); nh.getParam("nh_map",friends); ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d", nh_int_value, nh_double_value, nh_string_value.c_str(), nh_bool_value ); for (auto &&stu : stus) { ROS_INFO("stus 元素:%s",stu.c_str()); } for (auto &&f : friends) { ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str()); } // 3.getParamCached() nh.getParamCached("nh_int",nh_int_value); ROS_INFO("通过缓存获取数据:%d",nh_int_value); // 4.getParamNames() std::vector<std::string> param_names1; nh.getParamNames(param_names1); for (auto &&name : param_names1) { ROS_INFO("名称解析name = %s",name.c_str()); } ROS_INFO("----------------------------"); // 5.hadParam ROS_INFO("存在 nh_int 吗? %d",nh.hasParam("nh_int")); //判断某个键是否存在,存在返回true,不存在返回false ROS_INFO("存在 nh_intttt 吗? %d",nh.hasParam("nh_intttt")); // 6.searchParam() std::string key; nh.searchParam("nh_int",key); ROS_INFO("搜索键:%s",key.c_str()); //--------------------------------------------param--------------------------------- ROS_INFO("++++++++++++++++++++++++++++++++++++++++"); int res3 = ros::param::param("param_int",20); //存在 int res4 = ros::param::param("param_int2",20); // 不存在返回默认 ROS_INFO("param获取结果:%d,%d",res3,res4); // getParam 函数 int param_int_value; double param_double_value; bool param_bool_value; std::string param_string_value; std::vector<std::string> param_stus; std::map<std::string, std::string> param_friends; ros::param::get("param_int",param_int_value); ros::param::get("param_double",param_double_value); ros::param::get("param_bool",param_bool_value); ros::param::get("param_string",param_string_value); ros::param::get("param_vector",param_stus); ros::param::get("param_map",param_friends); ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d", param_int_value, param_double_value, param_string_value.c_str(), param_bool_value ); for (auto &&stu : param_stus) { ROS_INFO("stus 元素:%s",stu.c_str()); } for (auto &&f : param_friends) { ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str()); } // getParamCached() ros::param::getCached("param_int",param_int_value); ROS_INFO("通过缓存获取数据:%d",param_int_value); // getParamNames() std::vector<std::string> param_names2; ros::param::getParamNames(param_names2); for (auto &&name : param_names2) { ROS_INFO("名称解析name = %s",name.c_str()); } ROS_INFO("----------------------------"); ROS_INFO("存在 param_int 吗? %d",ros::param::has("param_int")); ROS_INFO("存在 param_intttt 吗? %d",ros::param::has("param_intttt")); std::string key; ros::param::search("param_int",key); ROS_INFO("搜索键:%s",key.c_str()); return 0; }
参数服务器删除参数
-
删除参数
-
ros::NodeHandle
deleteParam(“键”);
删除键及对应的值,删除成功返回true,否则返回falseros::NodeHandle nh; bool r1 = nh.deleteParam("nh_int"); ROS_INFO("nh 删除结果:%d",r1); -
ros::param
del(“键”);
删除键及对应的值,删除成功返回true,否则返回falsebool r2 = ros::param::del("param_int"); ROS_INFO("param 删除结果:%d",r2);
-
-
代码实现
#include "ros/ros.h" /* 参数服务器操作之删除_C++实现: ros::NodeHandle deleteParam("键") 根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false ros::param del("键") 根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false */ int main(int argc, char *argv[]) { setlocale(LC_ALL,""); ros::init(argc,argv,"delete_param"); // -------------------------NodeHandle--------------------------------- ros::NodeHandle nh; bool r1 = nh.deleteParam("nh_int"); ROS_INFO("nh 删除结果:%d",r1); // ---------------------------param------------------------------------ bool r2 = ros::param::del("param_int"); ROS_INFO("param 删除结果:%d",r2); return 0; }