ROS从入门到放弃学习笔记(一)——ROS系统安装及实践
前言
最近因为项目需要开始学习ROS,所以将所学重点整理为笔记,以备不时之需。
一、ZSH安装及配置
因为在ROS中要经常使用一些命令,所以在Ubuntu中选择了功能更为强大的ZSH作为默认的shell。
-
ZSH安装
使用apt软件包管理器在Ubuntu上安装ZSHsudo apt install zsh(1) ZSH安装
ZSH安装完成后并不会自动设置为默认shell。因此必须手动修改设置,使ZSH为默认shell#查看当前使用的shell echo $SHELL #将ZSH设置为默认shell chsh -s $(which zsh) chsh -s /usr/bin/zsh(2) 设置ZSH
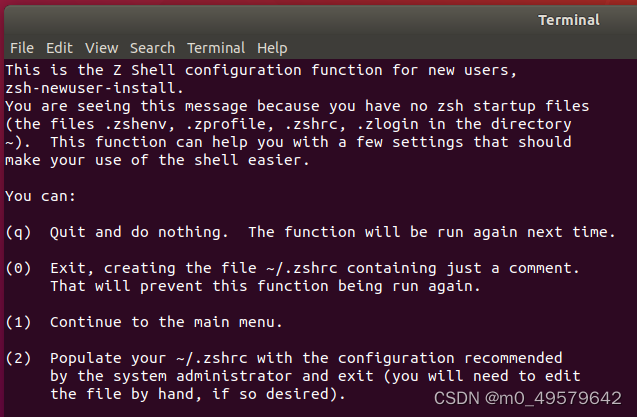
重启,ALT + CTRL + T打开命令行即可使用新的ZSH shell,初次打开需要对其进行设置
按下2,直接自动用默认参数填充.zshrc文件。
如需手动设置每个配置,则按下1进入主菜单,主菜单将显示一些推荐的配置选项。在此配置与历史相关的参数,如保留多少历史行和历史文件的位置。进入“历史配置页面(History Configuration page)”,输入“1”或“2”或“3”来更改相关的配置。一旦做了更改,状态将从“尚未保存(not yet saved)”更改为“设置但未保存(set but not saved)”,按下0以记住更改。
(3)恢复Bash Shell
如果想要恢复到旧shell,可以输入以下指令sudo apt –purge remove zsh chsh -s $(which “SHELL NAME”) -
oh-my-zsh
oh-