中断概念
CPU在执行当前程序时,由于系统出现了某急需处理的的情况,CPU暂停正在执行的程序,转而去执行另外一段特殊程序来处理出现的紧急事务,处理结束后,CPU自动返回到带原来暂停的程序中去继续执行,这种程序在执行过程中由于外界的原因被打断的情况称为中断。
1.中断服务函数:内核响应中断后执行的相应处理程序。
2.中断向量:中断服务程序的入口地址。每个中断源都对应一个固定的入口地址。当内核响应中断请求时,就会暂停当前的程序执行,然后跳转到该入口地址执行代码。
CC2530具有18个中断源,每个中断源都由各自的一系列特殊功能寄存器来进行控制。可以编程设计相关特殊功能寄存器,设置18个中断源的优先级以及使能中断申请响应等。
外部中断的工作原理
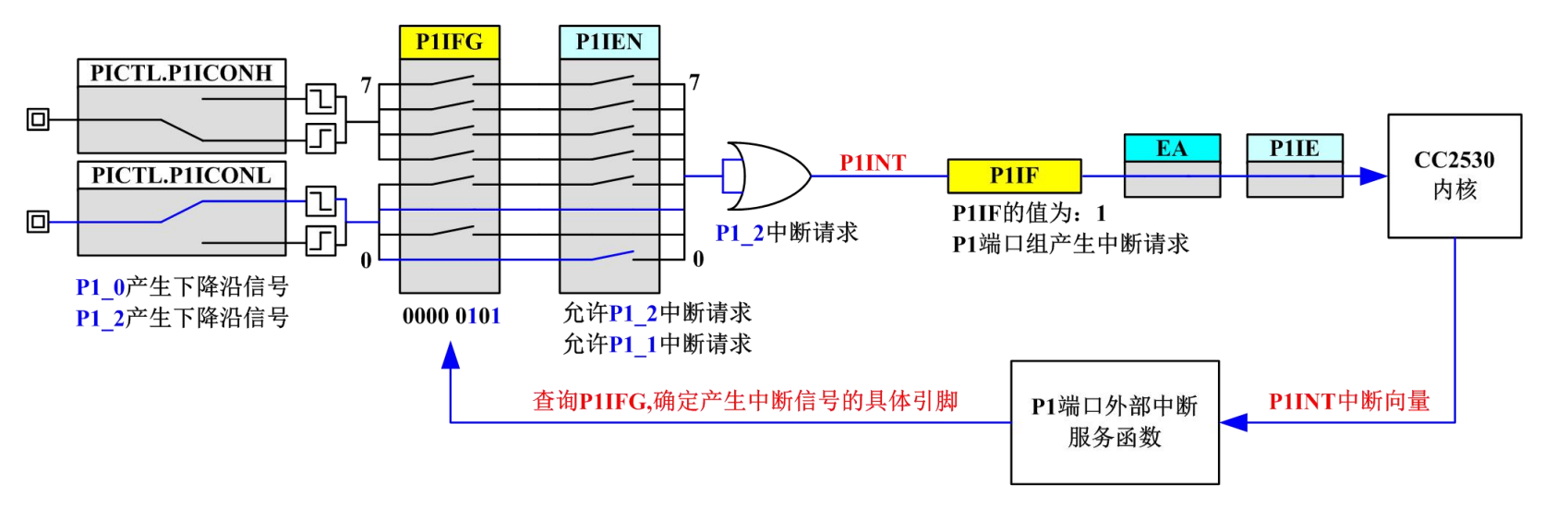
CC2530 的 P0、P1 和 P2 端口中,每一个引脚在设置为输入后,都可以用于产生外部中断。产生外部中断的信号有上升沿和下降沿 2 种,通过 PICTL 端口输入信号控制寄存器设置。 三个端口组作为三个独立的中断源,有三个中断使能控制位:IEN1.P0IE、IEN2.P1IE 和 IEN2.P2IE。每个端口组又有三个端口中断屏蔽寄存器 P0IEN、P1IEN 和 P2IEN,用于使能端口组中具体产生外部中断信号的引脚。在使能端口外部中断和总中断后,还需要通过 PxIEN 寄存器来设置当前端口组中,那些引脚具有外部中断功能。
只要端口的引脚产生了设定的中断触发信号,PxIFG 寄存器中对应的位便会置 1。在使能了 PxIEN 寄存器和 EA 总中断后,只要该端口组中有一个或多个引脚产生了中断触发信号, 对应的 PxIF 标志位置 1,内核响应便会响应该端口的外部中断请求,但内核并不知道是端口组中的哪一个引脚产生的请求。也就是说,不管是 P1_0 产生的中断请求,还是 P1_2 产生 的中断请求,在内核看来都是 P1 端口产生的中断请求。因此,在进行中断服务函数设计时, 还需要对 PxIFG 进行判断,才能确定是哪一个具体引脚产生的外部中断请求。 可以结合 P1 端口的外部中断结构,理解外部中断的工作原理。
CC2530 的 18 个中断源

寄存器
大致了解有哪些中断后,话不多说,我们来看看有关外部中断的使能寄存器:
IEN0 中断使能寄存器 0(可位寻址)
| 位 | 位名称 | 复位值 | 操作 | 描述 |
| 7 | EA | 0 | R0 | 中断系统使能控制位,即:总中断。 0:禁止所有中断。 1:允许所有中断。 |
| 6 | -- | 00 | R0 | 未使用,读为 0 |
| 5 | STIE | 0 | R/W | 睡眠定时器中断使能。 0:中断禁止 1:中断使能 |
| 4 | ENCIE | 0 | R/W | AES 加密/解密中断使能。 0:中断禁止 1:中断使能 |
| 3 | URX1IE | 0 | R/W | USART1 接收中断使能。 0:中断禁止 1:中断使能 |
| 2 | URX0IE | 0 | R/W | USART0 接收中断使能。 0:中断禁止 1:中断使能 |
| 1 | ADCIE | 0 | R/W | ADC 中断使能。 0:中断禁止 1:中断使能 |
| 0 | RFERRIE | 0 | R/W | RF 发送/接收 FIFO 中断使能。 0:中断禁止 1:中断使能 |
IEN1 中断使能寄存器 1(可位寻址)
| 位 | 位名称 | 复位值 | 操作 | 描述 |
| 7:6 | -- | 00 | R0 | 不使用,读为 0 |
| 5 | P0IE | 0 | R/W | 端口 0 中断使能。 0:中断禁止 1:中断使能 |
| 4 | T4IE | 0 | R/W | 定时器 4 中断使能。 0:中断禁止 1:中断使能 |
| 3 | T3IE | 0 | R/W | 定时器 3 中断使能。 0:中断禁止 1:中断使能 |
| 2 | T2IE | 0 | R/W | 定时器 2 中断使能 0:中断禁止 1:中断使能 |
| 1 | T1IE | 0 | R/W | 定时器 1 中断使能。 0:中断禁止 1:中断使能 |
| 0 | DMAIE | 0 | R/W | DMA 中断使能 0:中断禁止 1:中断使能 |
IEN2 中断使能寄存器 2(在 ioCC2530.h 头文件中没做位定义,故不能位寻址)
| 位 | 位名称 | 复位值 | 操作 | 描述 |
| 7:6 | -- | 00 | R0 | 不使用,读为 0。 |
| 5 | WDTIE | 0 | R/W | 看门狗定时器中断使能。 0:中断禁止 1:中断使能 |
| 4 | P1IE | 0 | R/W | 端口 1 中断使能。 0:中断禁止 1:中断使能 |
| 3 | UTX1IE | 0 | R/W | USART1 发送中断使能 0:中断禁止 1:中断使能 |
| 2 | UTX0IE | 0 | R/W | USART0 发送中断使能。 0:中断禁止 1:中断使能 |
| 1 | P2IE | 0 | R/W | USART0 发送中断使能。 0:中断禁止 1:中断使能 |
| 0 | RFIE | 0 | R/W | RF 一般中断使能。 0:中断禁止 1:中断使能 |
位寻址:可以通过位名称来修改其值,如IEN0 中断使能寄存器 0中有个位名称为EA,直接
EA=1;就行了,
上面三个是关于中断的使能位寄存器,涵盖了18个中断源,再来看看端口使能的中断寄存器,上面的寄存器是具体到某个端口,而下面的寄存器则是具体到某个引脚。
P0IEN P0 端口中断使能寄存器
| 位 | 位名称 | 复位值 | 操作 | 描述 |
| 7:0 | P0_[7:0]IEN | 0x00 | R/W | 端口 P0_7 到 P0_0 中断使能。 0:中断禁止 1:中断使能 |
P1IEN P1 端口中断使能寄存器
| 位 | 位名称 | 复位值 | 操作 | 描述 |
| 7:0 | P1_[7:0]IEN | 0x00 | R/W | 端口 P1_7 到 P1_0 中断使能。 0:中断禁止 1:中断使能 |
P2IEN P2 端口中断使能寄存器
| 位 | 位名称 | 复位值 | 操作 | 描述 |
| 7:6 | -- | 00 | R0 | 不使用,读为 0 |
| 5 | DPIEN | 0 | R/W | USB D+中断使能 |
| 4:0 | P2_[4:0]IEN | 0x00 | R/W | 端口 P2_4 到 P2_0 中断使能。 0:中断禁止 1:中断使能 |
PICTL 端口输入信号控制寄存器
| 位 | 位名称 | 复位值 | 操作 | 描述 |
| 7 | PADSC | 0 | R/W | 控制 I/O 引脚输出模式下的驱动能力。 |
| 6:4 | -- | 000 | R0 | 未使用。 |
| 3 | P2ICON | 0 | R/W | 端口 P2_4 到 P2_0 中断触发方式选择。 0:上升沿触发。 1:下降沿触发 |
| 2 | P1ICONH | 0 | R/W | 端口 P1_7 到 P1_4 中断触发方式选择。 0:上升沿触发。 1:下降沿触发 |
| 1 | P1ICONL | 0 | R/W | 端口 P1_3 到 P1_0 中断触发方式选择。 0:上升沿触发。 1:下降沿触发 |
| 0 | P0ICON | 0 | R/W | 端口 P0_7 到 P0_0 中断触发方式选择。 0:上升沿触发。 1:下降沿触发。 |
接下来,来看看对于端口外部中断来说很重要的三个标志位
P0IFG P0 端口中断状态标志寄存器
(该标志必须在清除端口中断标志 P0IF 之前清除)
| 位 | 位名称 | 复位值 | 操作 | 描述 |
| 7:0 | P0IF_[7:0] | 0x00 | R/W0 | 端口 P0_7 到 P0_0 的中断状态标志。 当输入端口有未响应的中断请求时,相应标志位硬件自动置 1, 需要通过软件人工清 0。 0:无中断请求。 1:有中断请求。 |
P1IFG P1 端口中断状态标志寄存器
(该标志必须在清除端口中断标志 P1IF 之前清除)
| 位 | 位名称 | 复位值 | 操作 | 描述 |
| 7:0 | P1IF_[7:0] | 0x00 | R/W0 | 端口 P1_7 到 P1_0 的中断状态标志。 当输入端口有未响应的中断请求时,相应标志位硬件自动置 1, 需要通过软件人工清 0。 0:无中断请求。 1:有中断请求。 |
P2IFG P2 端口中断状态标志寄存器
(该标志必须在清除端口中断标志 P2IF 之前清除)
| 位 | 位名称 | 复位值 | 操作 | 描述 |
| 7:6 | -- | 00 | R0 | 未使用,读为 0。 |
| 5 | DPIF | 0 | R/W0 | USB D+中断标志位 |
| 4:0 | P2IF_[4:0] | 0x00 | R/W0 | 端口 P2_4 到 P2_0 的中断状态标志。 当输入端口有未响应的中断请求时,相应标志位硬件自动置 1, 需要通过软件人工清 0。 0:无中断请求。 1:有中断请求。 |
呼~是不是感觉这一章的寄存器有点多呢?其实除了中断的使能寄存器,后面的端口触发的寄存器中断比赛的时候很少很少涉及得到,平常开发项目可能就经常用得到,所以,还是得学了解了解。
了解了概念、原理和寄存器,接下来看代码的了。
来完成这两道题加深对其的理解(PS:题目是欧老师的题库):

3.1完整代码:
#include "ioCC2530.h"
#define D3 P1_0 // 定义 LED 灯的引脚号
#define D4 P1_1
#define D5 P1_3
#define D6 P1_4
#define SW1 P0_1 // 定义按键的引脚号
#define SW2 P1_2
void Init_port() // 初始化端口
{
P1SEL &= ~0x1b; // 配置 P1_0、P1_1、P1_3、P1_4 为数字 IO 口
P1DIR |= 0x1b; // 配置 P1_0、P1_1、P1_3、P1_4 为输出口
P1 &= ~0x1b; // 初始化 P1_0、P1_1、P1_3、P1_4 为低电平状态
P1SEL &= ~0x04; // 配置 P1_2 为数字 IO 口
P1DIR &= ~0x04; // 配置 P1_2 为输入口
P1INP &= ~0x04; // 配置 P1_2 的输入缓冲区范围
P2INP &= ~0x40; // 配置 P1_2 所在的管脚的输入缓冲区范围
P0SEL &= ~0x02; // 配置 P0_1 为数字 IO 口
P0DIR &= ~0x02; // 配置 P0_1 为输入口
P0INP &= ~0x02; // 配置 P0_1 的输入缓冲区范围
P2INP &= ~0x20; // 配置 P0_1 所在的管脚的输入缓冲区范围
P1IEN |= 0x04; // 配置 P1_2 为外部中断口
PICTL |= 0x02; // 配置外部中断的边缘触发方式(上升沿触发)
IEN2 |= 0x10; // 开启外部中断
EA=1; // 开启总中断允许位
}
void Delay(unsigned int t) // 实现简单的延时函数
{
while(t--);
}
#pragma vector=P1INT_VECTOR // 定义中断服务程序函数
__interrupt void SW_1() // 当按键被按下引起外部中断时,执行该函数
{
D5 = ~D5; // 翻转 LED D5 的状态
P1IFG &= ~0x04; // 清除中断标志位
P1IF=0;
}
void main()
{
Init_port(); // 调用初始化函数
while(1)
{
D4=1; // 点亮 LED D4
Delay(0xffff); // 延时一段时间
D4=0; // 关闭 LED D4
Delay(0xffff); // 延时一段时间
}
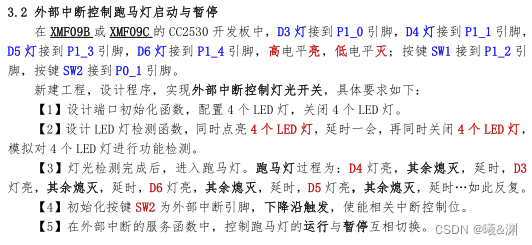
}3.2完整代码:
#include "ioCC2530.h"
#define D3 P1_0 // 定义 LED 灯的引脚号
#define D4 P1_1
#define D5 P1_3
#define D6 P1_4
#define SW1 P0_1 // 定义按键的引脚号
#define SW2 P1_2
unsigned int keys=0; // 定义按键状态变量
void Init_port() // 初始化端口
{
P1SEL &= ~0x1b; // 配置 P1_0、P1_1、P1_3、P1_4 为数字 IO 口
P1DIR |= 0x1b; // 配置 P1_0、P1_1、P1_3、P1_4 为输出口
P1 &= ~0x1b; // 初始化 P1_0、P1_1、P1_3、P1_4 为低电平状态
P1SEL &= ~0x04; // 配置 P1_2 为数字 IO 口
P1DIR &= ~0x04; // 配置 P1_2 为输入口
P1INP &= ~0x04; // 配置 P1_2 的输入缓冲区范围
P2INP &= ~0x40; // 配置 P1_2 所在的管脚的输入缓冲区范围
P0SEL &= ~0x02; // 配置 P0_1 为数字 IO 口
P0DIR &= ~0x02; // 配置 P0_1 为输入口
P0INP &= ~0x02; // 配置 P0_1 的输入缓冲区范围
P2INP &= ~0x20; // 配置 P0_1 所在的管脚的输入缓冲区范围
P0IE = 1; // 允许 P0_1 的中断功能
P0IEN |= 0x02; // 配置 P0_1 为外部中断口
PICTL |= 0x01; // 配置外部中断的边缘触发方式(下降沿触发)
P0IFG &= ~0x02; // 清除中断标志位
P0IF=0; // 清除中断标志位
EA=1; // 开启总中断允许位
}
void Delay(unsigned int t) // 实现简单的延时函数
{
while(t--)
{
while(keys==1); // 如果按键被按下,则进入等待状态
}
}
#pragma vector=P0INT_VECTOR // 定义中断服务程序函数
__interrupt void key2() // 当按键被按下引起外部中断时,执行该函数
{
EA=0; // 关闭总中断允许位
if(keys==0) // 如果按键状态为未按下,则将按键状态变量设为已按下
{
keys=1;
}else
{
keys=0; // 如果按键状态为已按下,则将按键状态变量设为未按下
}
P0IFG &= ~0x02; // 清除中断标志位
P0IF = 0; // 清除中断标志位
EA=1; // 开启总中断允许位
}
void led() // 控制 LED 灯的函数
{
D4=1; // 点亮 LED D4
D3=0;
D5=0;
D6=0;
Delay(0xffff); // 延时一段时间
D4=0; // 关闭 LED D4
D3=1; // 点亮 LED D3
D5=0;
D6=0;
Delay(0xffff); // 延时一段时间
D4=0;
D3=0;
D5=0;
D6=1;
Delay(0xffff);
D4=0;
D3=0;
D5=1;
D6=0;
Delay(0xffff);
}
void main()
{
Init_port();
while(1)
{
led();
}
}
另外简单的运用下新大陆库函数的调用(因为很少用到这里就不过多的讲解):
#include "hal_defs.h"
#include "hal_cc8051.h"
#include "hal_int.h"
#include "hal_mcu.h"
#include "hal_board.h"
#include "hal_led.h"
#include "hal_rf.h"
#include "basic_rf.h"
#include "hal_uart.h"
#include "sensor_drv/sensor.h"
#include <stdio.h>
#include <string.h>
#include <stdarg.h>
#include "hal_digio.h"
/*****点对点通讯地址设置******/
#define RF_CHANNEL 11 // 频道 11~26
#define PAN_ID 0x0001 //网络id
#define MY_ADDR 0x0002 //本机模块地址
#define SEND_ADDR 0x0003 //发送地址
/**************************************************/
static basicRfCfg_t basicRfConfig;
// 无线RF初始化
void ConfigRf_Init(void)
{
basicRfConfig.panId = PAN_ID;
basicRfConfig.channel = RF_CHANNEL;
basicRfConfig.myAddr = MY_ADDR;
basicRfConfig.ackRequest = TRUE;
while(basicRfInit(&basicRfConfig) == FAILED);
basicRfReceiveOn();
}
#define D3 P1_0 // 定义 LED 灯的引脚号
#define D4 P1_1
digioConfig dig;
#pragma vector = P1INT_VECTOR // 定义中断服务程序函数
__interrupt void P1_D() // 当按键被按下引起外部中断时,执行该函数
{
D3 = ~D3; // 翻转 LED 灯的状态
halDigioIntClear(&dig); // 清除中断标志
P1IF = 0; // 清除中断标志
}
void init_led()
{
P1SEL &= ~0x1b; // 配置 P1_0、P1_1 为数字 IO 口
P1DIR |= 0x1b; // 配置 P1_0、P1_1 为输出口
P1 &= ~0x1b; // 初始化 P1_0、P1_1 为低电平状态
}
/********************MAIN************************/
void main(void)
{
halBoardInit(); // 板级初始化函数,选手不得在此函数内添加代码
ConfigRf_Init(); // RF 配置初始化函数,选手不得在此函数内添加代码
dig.port = 1;
dig.pin = 2;
dig.pin_bm = 0x04;
dig.dir = HAL_DIGIO_INPUT;
dig.initval = 1;
halDigioConfig(&dig); // 配置数字 IO 为输入口
halDigioIntEnable(&dig); // 允许数字 IO 的中断功能
halDigioIntSetEdge(&dig,HAL_DIGIO_INT_FALLING_EDGE); // 配置数字 IO 的中断类型为下降沿触发
EA = 1; // 开启总中断允许位
init_led(); // 初始化 LED 灯
D4 = 1; // 设置 D4 引脚为高电平状态
while(1)
{
/* 用户代码开始 */
/* 用户代码结束 */
}
}