Flink容错机制和状态一致性
一、检查点(Checkpoint)
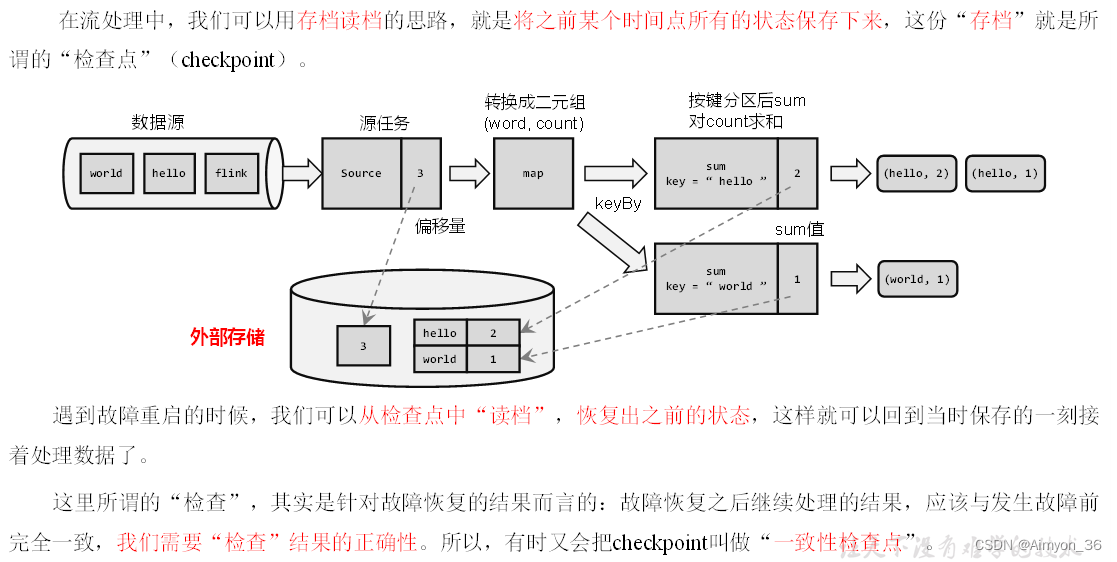
1.检查点的保存
1)周期性的触发保存
“随时存档”确实恢复起来方便,可是需要我们不停地做存档操作。如果每处理一条数据就进行检查点的保存,当大量数据同时到来时,就会耗费很多资源来频繁做检查点,数据处理的速度就会受到影响。所以在Flink中,检查点的保存是周期性触发的,间隔时间可以进行设置。
2)保存的时间点
我们应该在所有任务(算子)都恰好处理完一个相同的输入数据的时候,将它们的状态保存下来。
这样做可以实现一个数据被所有任务(算子)完整地处理完,状态得到了保存。
如果出现故障,我们恢复到之前保存的状态,故障时正在处理的所有数据都需要重新处理;
我们只需要让源(source)任务向数据源重新提交偏移量、请求重放数据就可以了。
当然这需要源任务可以把偏移量作为算子状态保存下来,而且外部数据源能够重置偏移量;
kafka就是满足这些要求的一个最好的例子。
将状态恢复到检查点状态后,需要对检查点之后处理的数据进行重播处理。
2.从检查点恢复状态
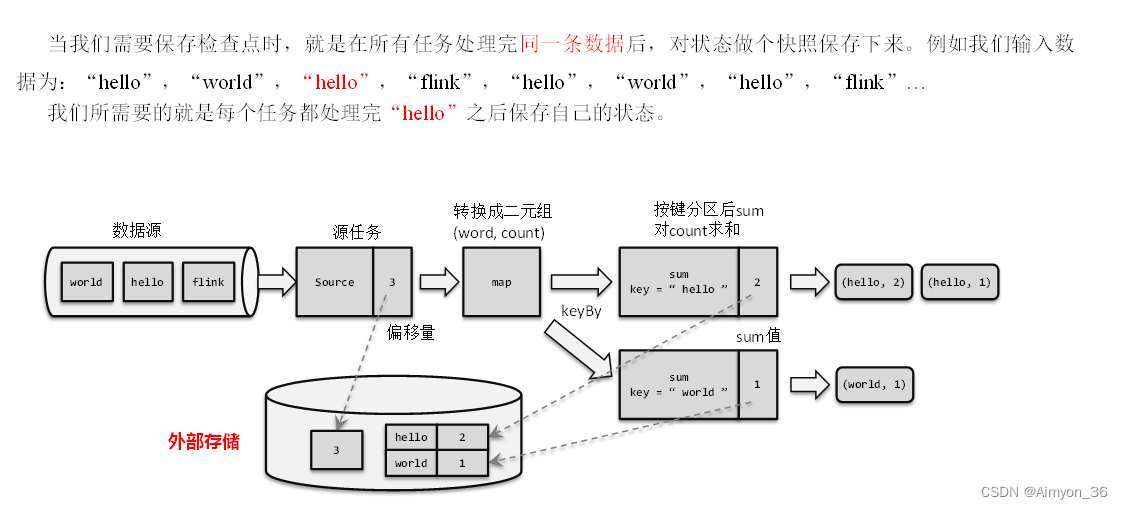
当所有算子都处理完"hello“这条数据后,flink对该状态进行保存。
当处理到"flink"这条数据时,系统发生故障,flink使用检查点机制将所有算子都恢复到上一次保存的状态,并且要求source重新提交偏移量,对检查点之后的数据进行重播处理
检查点算法
在Flink中,采用了基于Chandy-Lamport算法的分布式快照,可以在不暂停整体流处理的前提下,将状态备份保存到检查点。
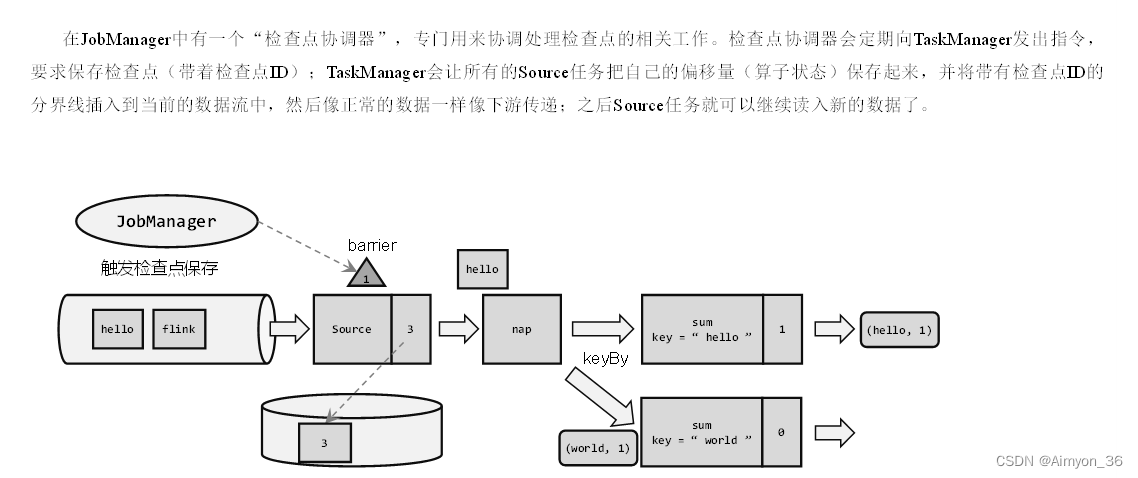
二、检查点分界线(Barrier)
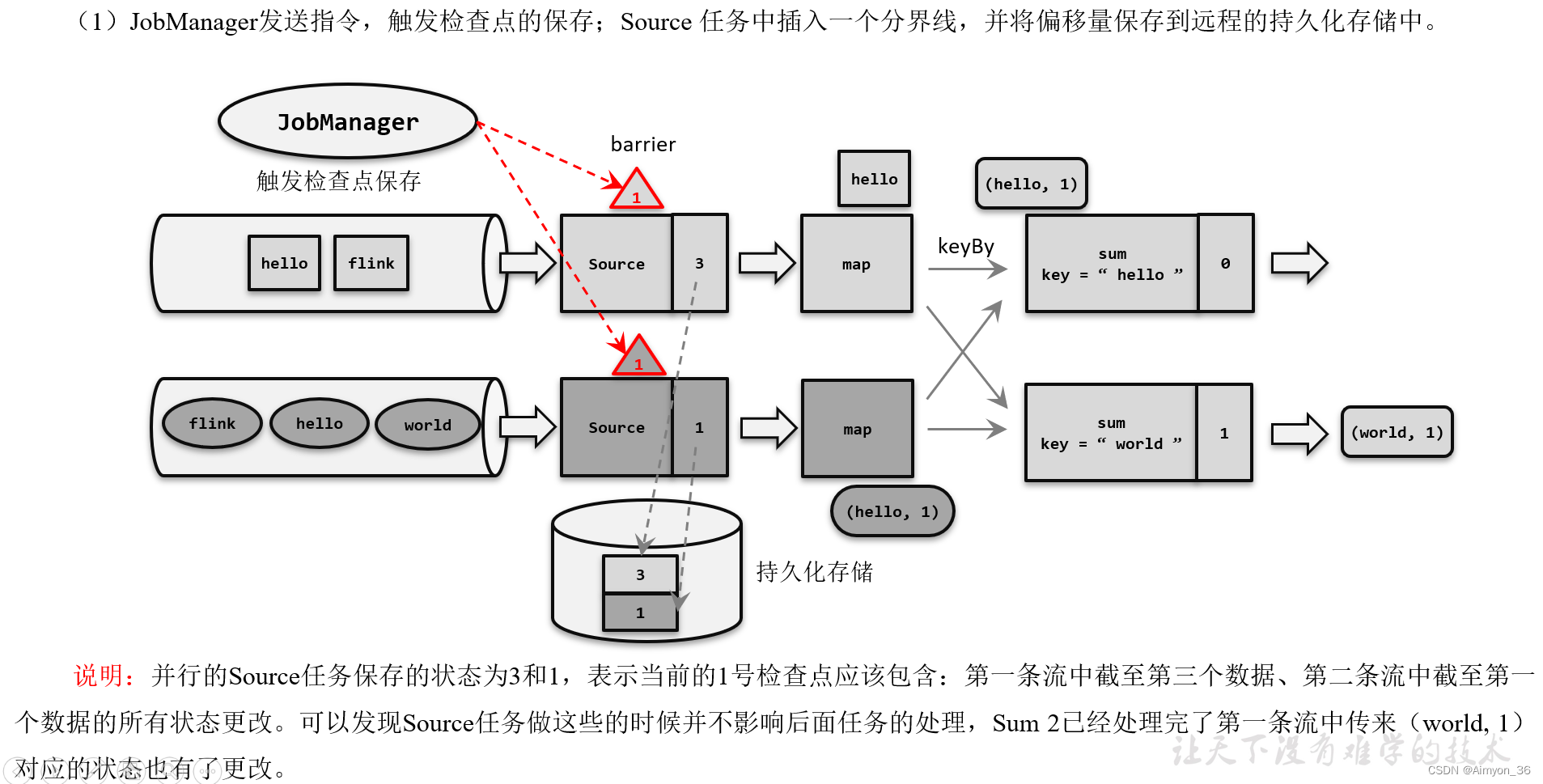
借鉴水位线的设计,在数据流中插入一个特殊的数据结构,专门用来表示触发检查点保存的时间点。收到保存检查点的指令后,Source任务可以在当前数据流中插入这个结构;之后的所有任务只要遇到它就开始对状态做持久化快照保存。由于数据流是保持顺序依次处理的,因此遇到这个标识就代表之前的数据都处理完了,可以保存一个检查点;而在它之后的数据,引起的状态改变就不会体现在这个检查点中,而需要保存到下一个检查点。
这种特殊的数据形式,把一条流上的数据按照不同的检查点分隔开,所以就叫做检查点的“分界线”
检查点分界线能够将数据划分为 已处理数据和未处理数据
1.分布式快照算法(Barrier对齐的精准一次)
watermark指示的是“之前的数据全部到齐了”,而barrier指示的是“之前所有数据的状态更改保存入当前检查点”:它们都是一个“截止时间”的标志。
所以在处理多个分区的传递时,也要以是否还会有数据到来作为一个判断标准。
具体实现上,Flink使用了Chandy-Lamport算法的一种变体,被称为**“异步分界线快照”**算法。算法的核心就是两个原则:
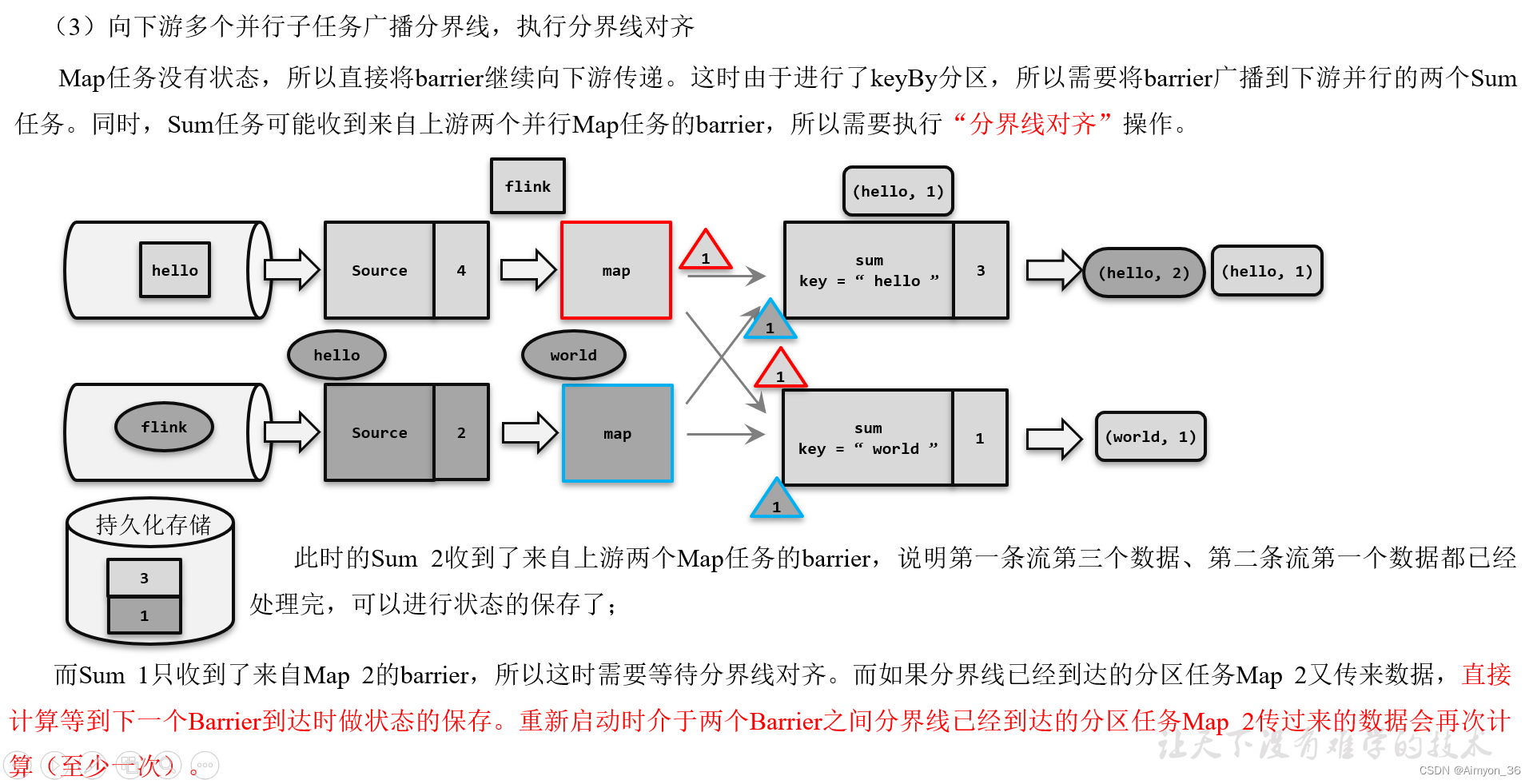
1.当上游任务向多个并行下游任务发送barrier时,需要广播出去;
2.而当多个上游任务向同一个下游任务传递分界线时,需要在下游任务执行“分界线对齐”操作,也就是需要等到所有并行分区的barrier都到齐,才可以开始状态的保存。
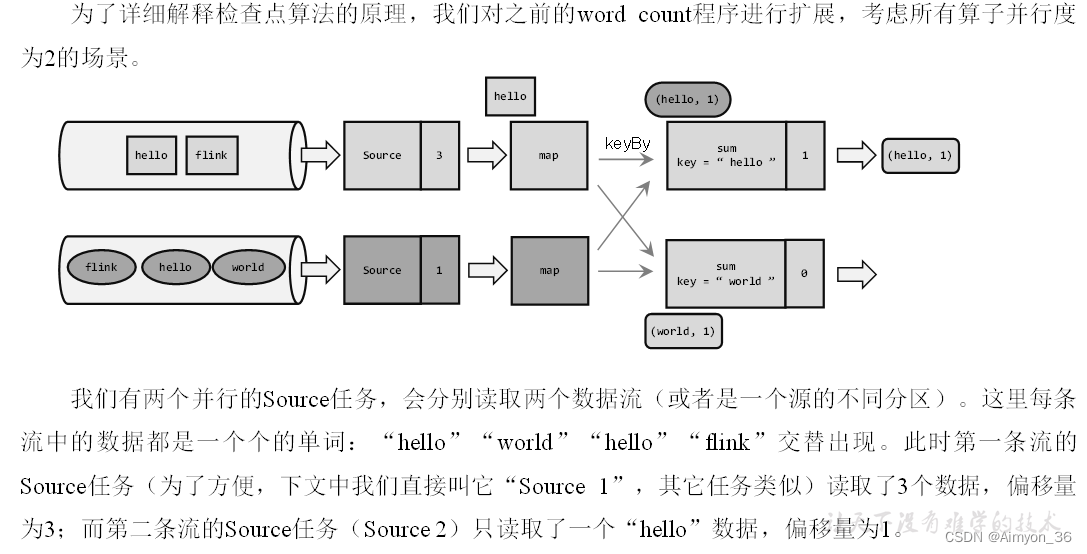
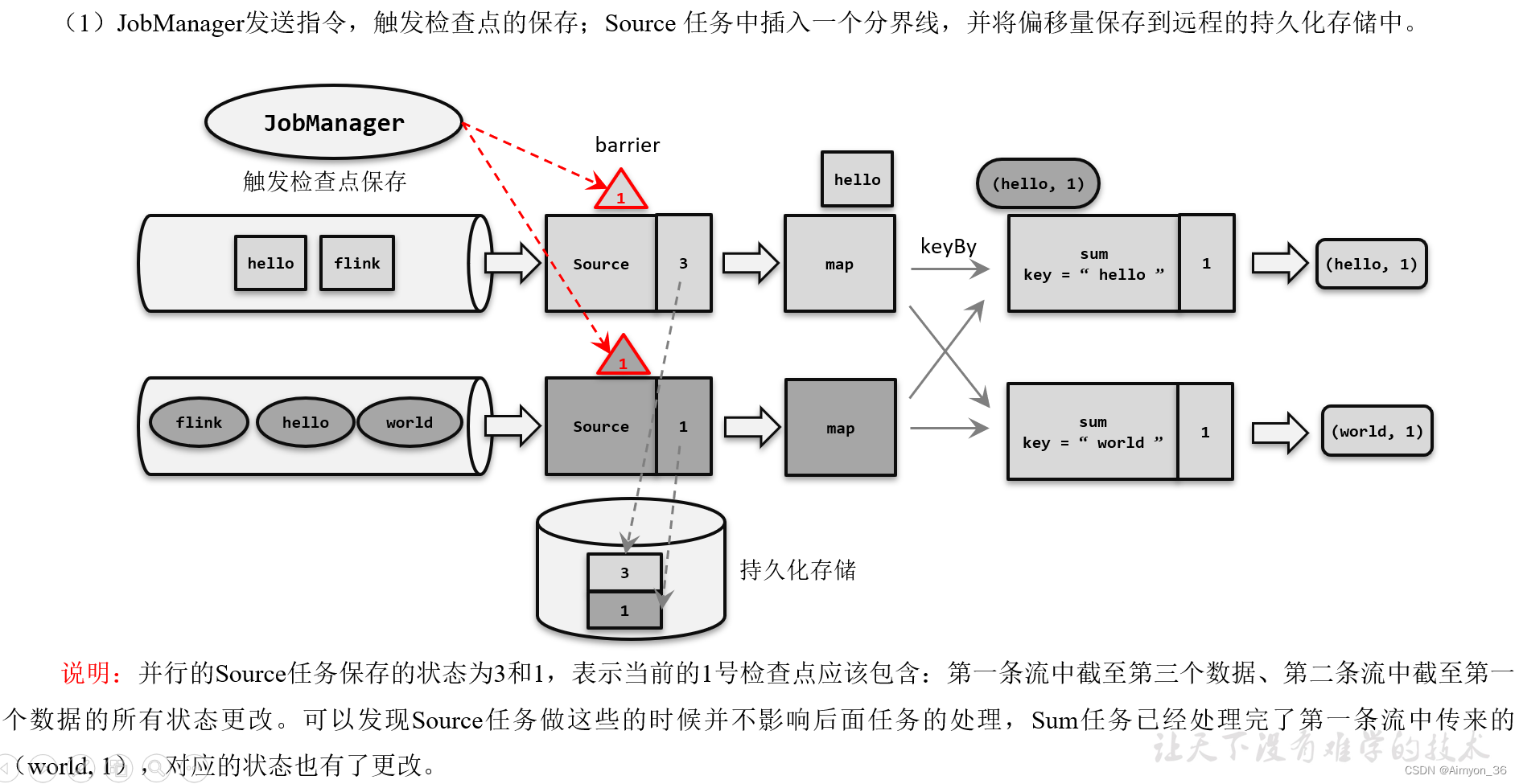
检查点算法的并行场景
检查点保存算法的具体过程
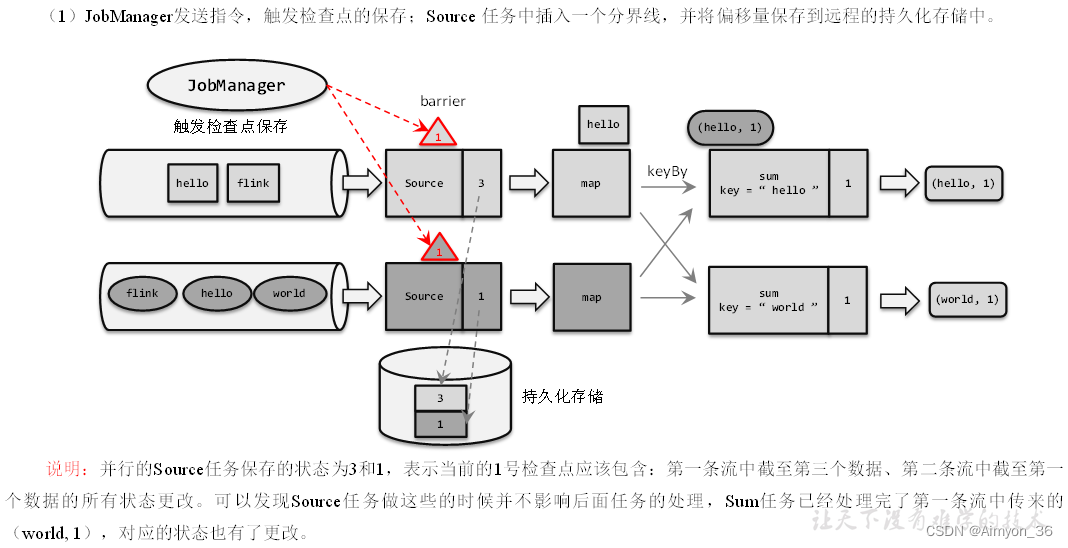
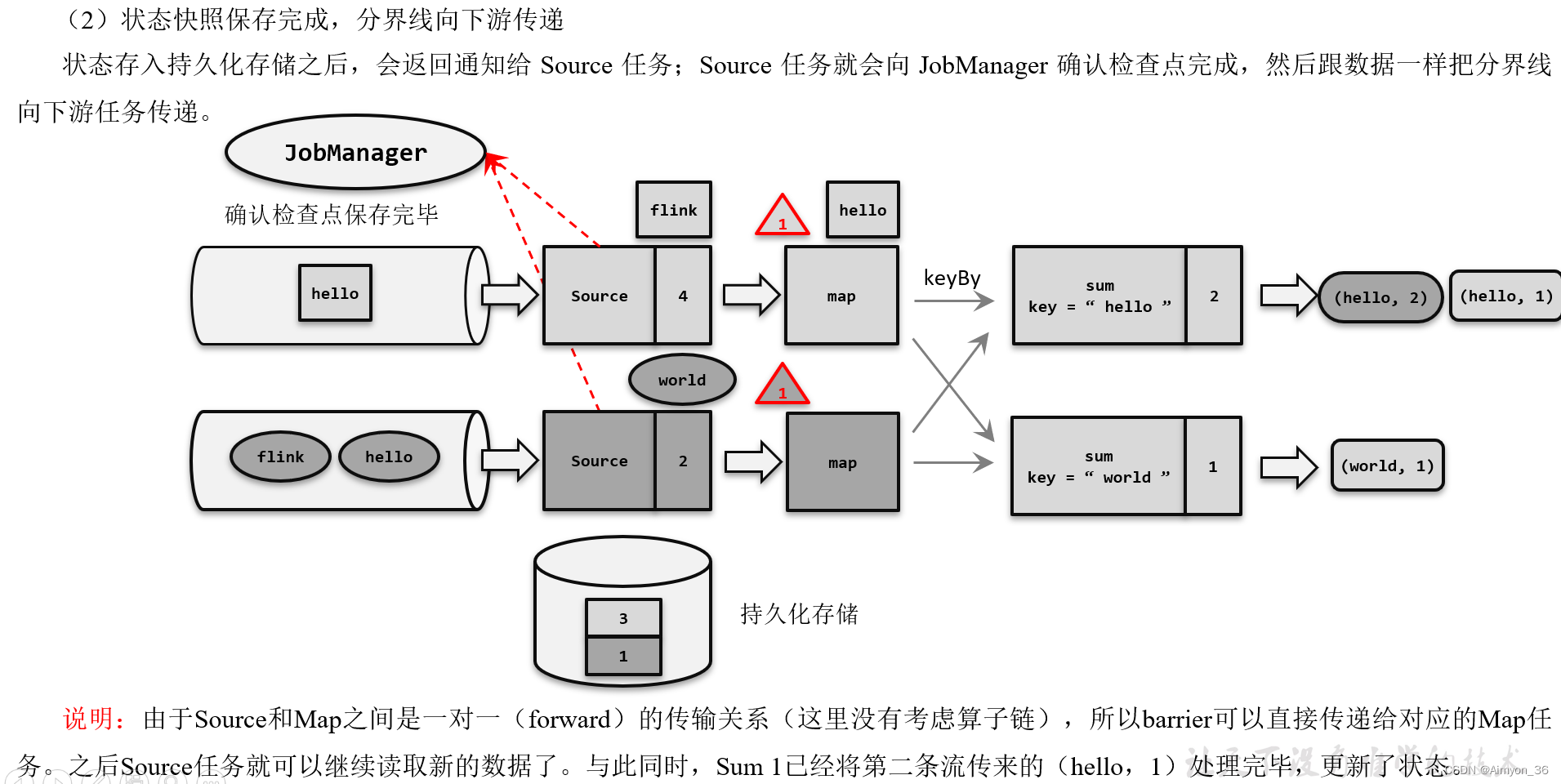
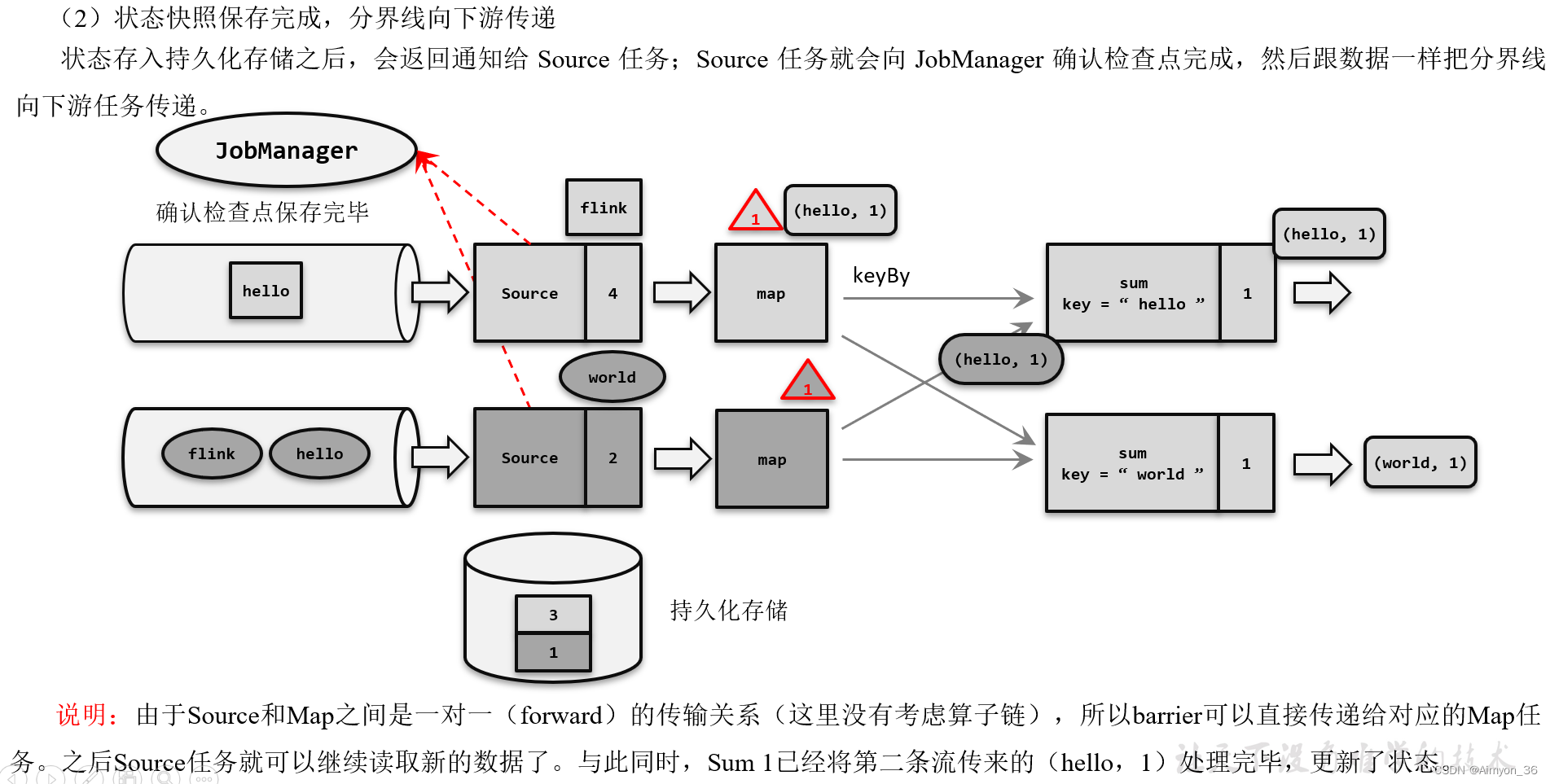
(1)触发检查点:JobManager向Source发送Barrier;
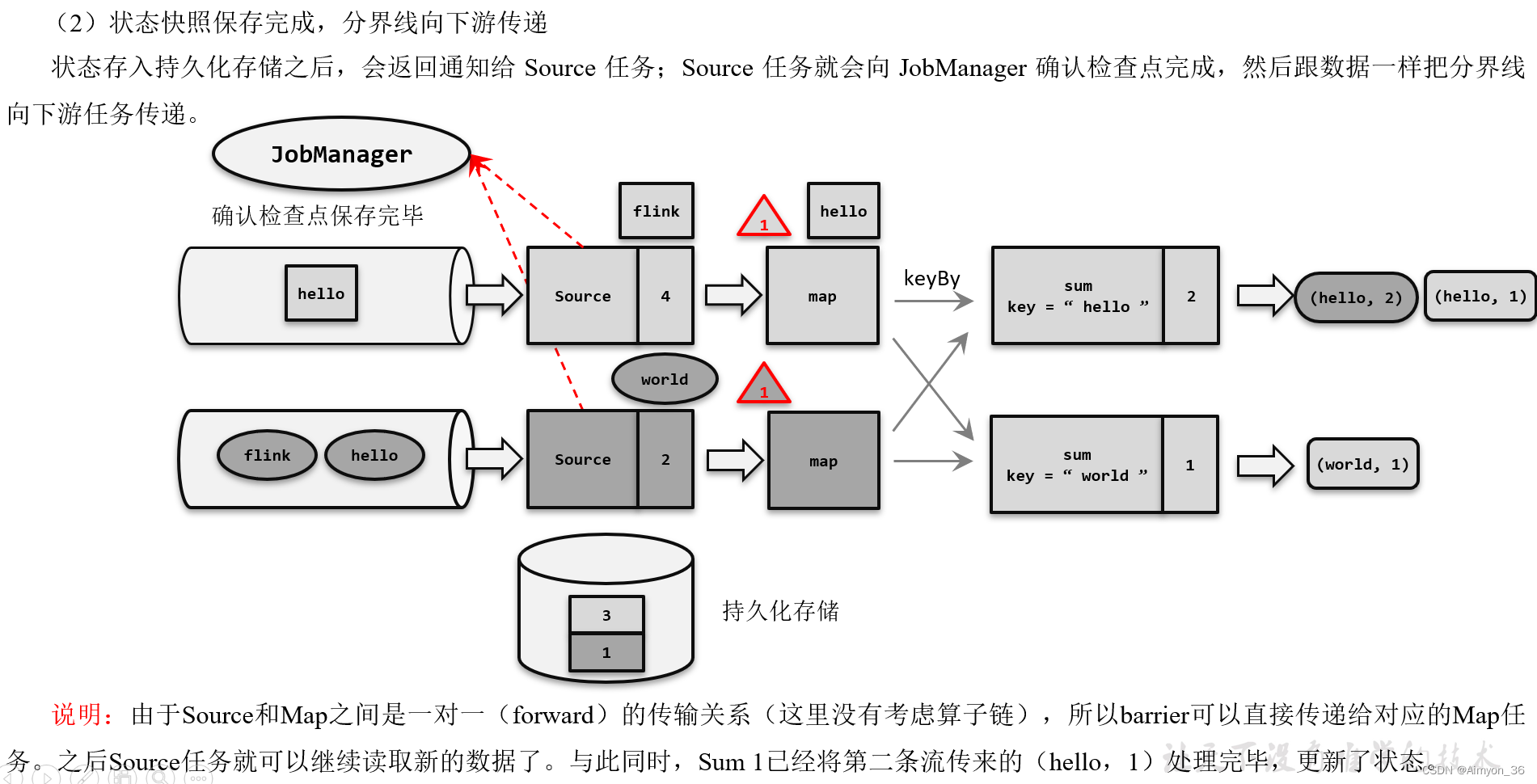
(2)Barrier发送:向下游广播发送;
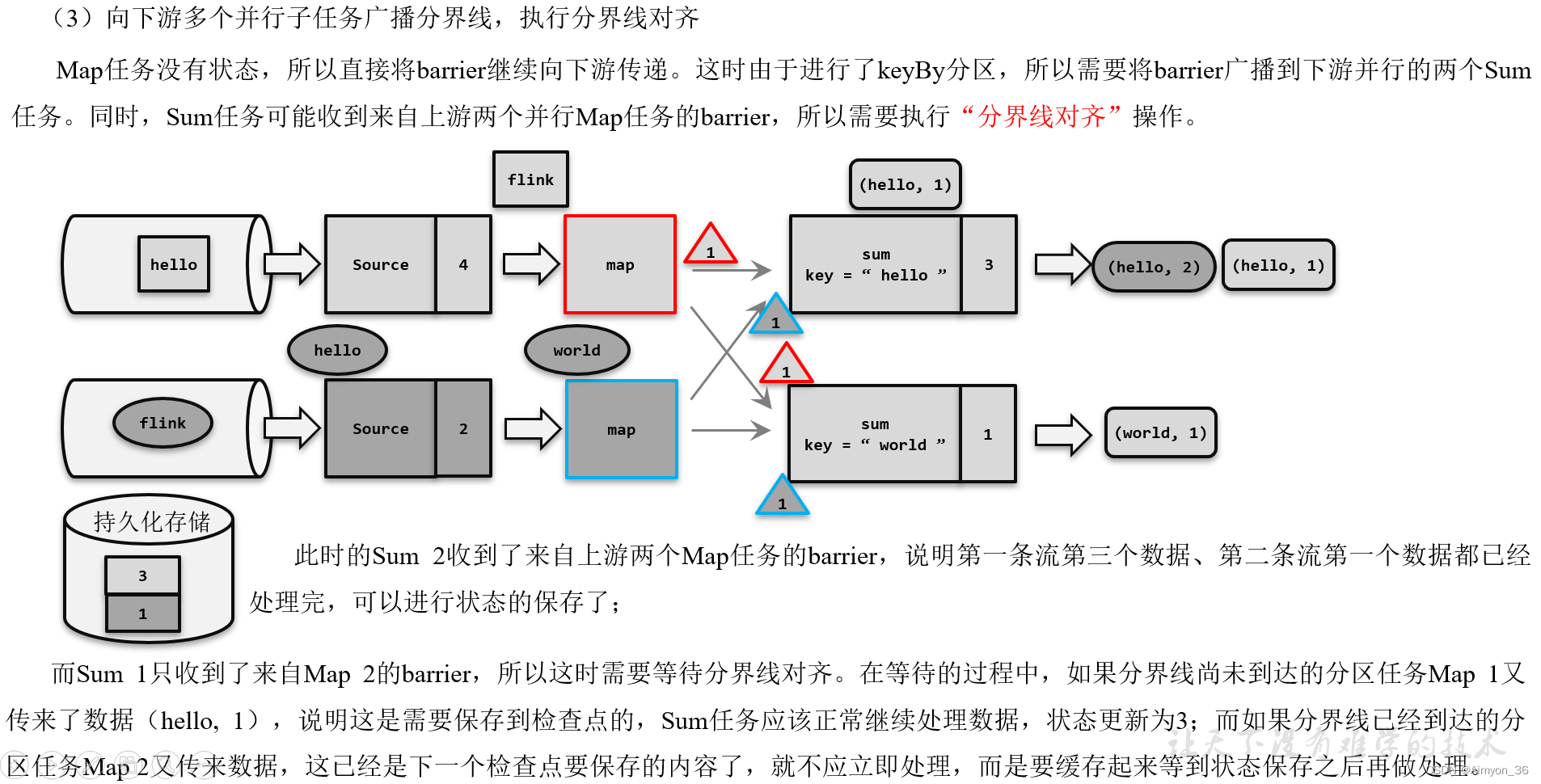
(3)Barrier对齐:下游需要收到上游所有并行度传递过来的Barrier才做自身状态的保存;
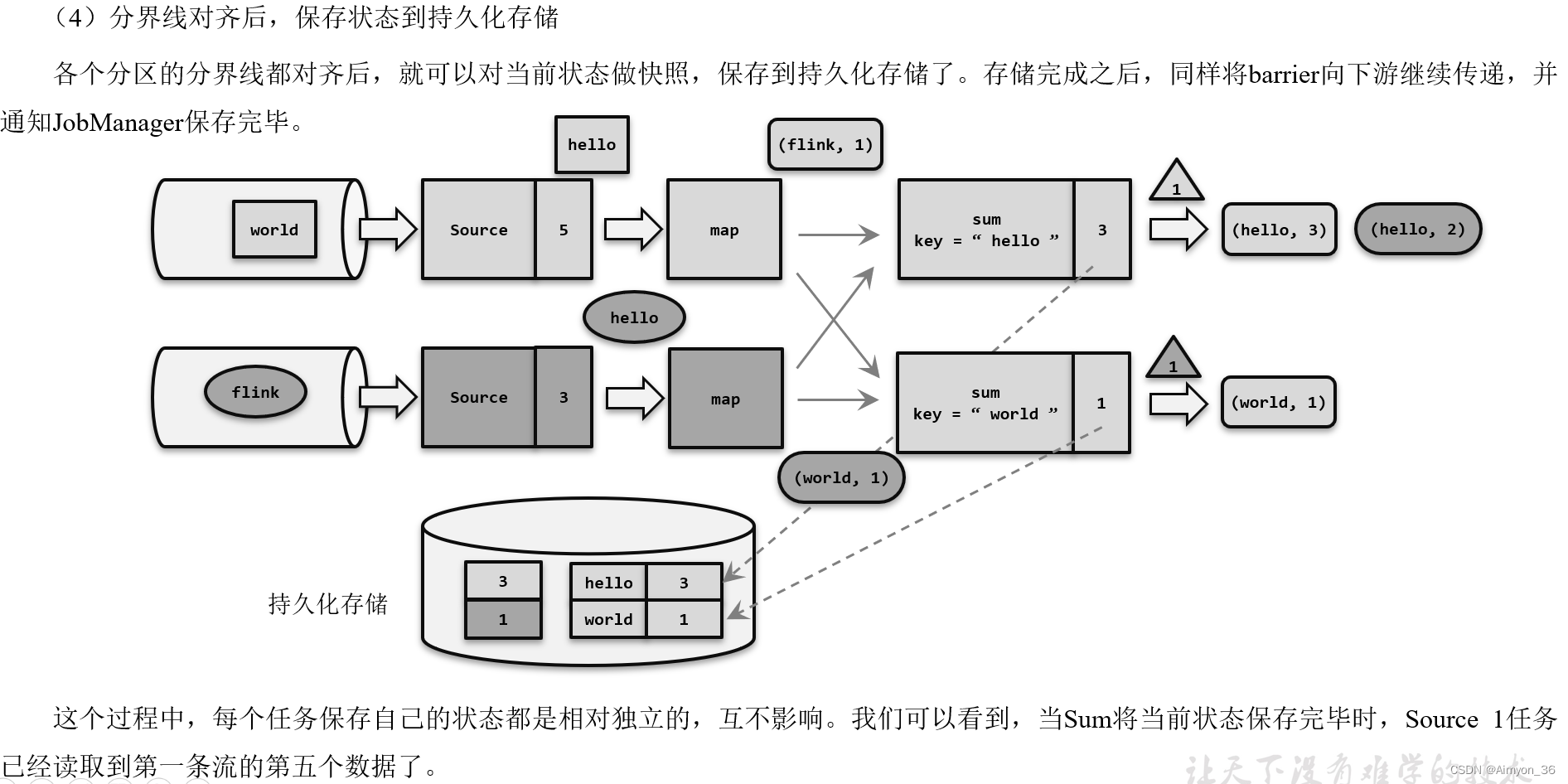
(4)状态保存:有状态的算子将状态保存至持久化。
(5)先处理缓存数据,然后正常继续处理
完成检查点保存之后,任务就可以继续正常处理数据了。这时如果有等待分界线对齐时缓存的数据,需要先做处理;然后再按照顺序依次处理新到的数据。当JobManager收到所有任务成功保存状态的信息,就可以确认当前检查点成功保存。之后遇到故障就可以从这里恢复了。
由于分界线对齐要求先到达的分区做缓存等待,一定程度上会影响处理的速度;当出现背压时,下游任务会堆积大量的缓冲数据,检查点可能需要很久才可以保存完毕。
为了应对这种场景,Barrier对齐中提供了至少一次语义以及Flink 1.11之后提供了不对齐的检查点保存方式,可以将未处理的缓冲数据也保存进检查点。这样,当我们遇到一个分区barrier时就不需等待对齐,而是可以直接启动状态的保存了。
2. 分布式快照算法(Barrier对齐的至少一次)
至少一次状态下,每个任务保存的状态都是相对独立的,比如source只保存了前3条数据,而sum却计算到了第5条数据,那么在程序重启时会造成数据的重复计算,但是至少一次状态下数据不会等待分界线的合并。
3.分布式快照算法(非Barrier对齐的精准一次)
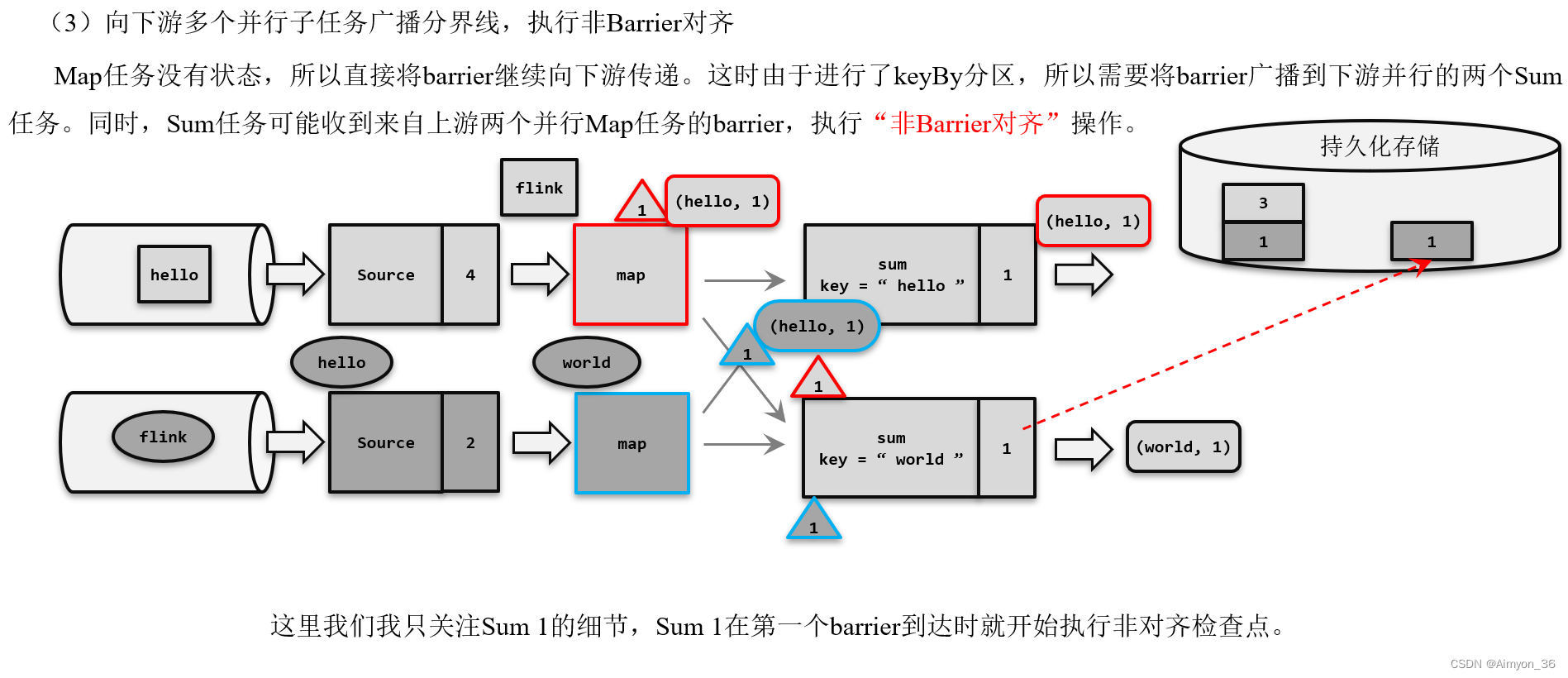
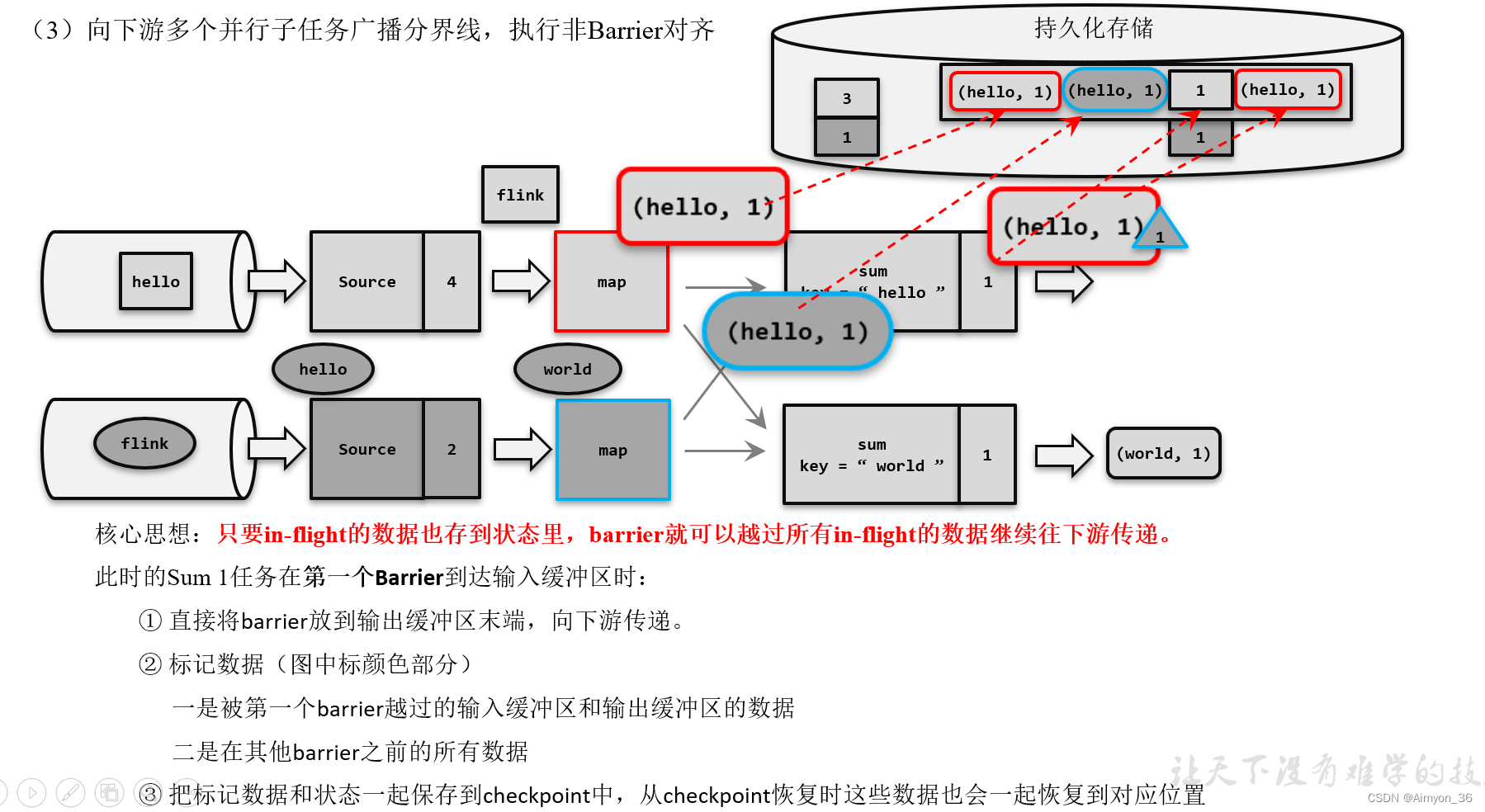
当Task接收到Barrier时,就开始执行备份,并将Barrier直接放到输出缓冲区的最前边,并将该Barrier和未到达的Barrier范围内的数据状态进行保存,直到最后一个Barrier到达才结束该Task备份。
当使用CheckPoint恢复时,这些状态需要恢复到对应的位置。
非Barrier对齐的精准一次虽然实现了数据的精准一次和数据等待问题,但是在保存数据时不仅需要将状态保存还需要对数据进行保存,一定程度上增加了网络的IO,当需要保存的数据过多时也会造成一定的问题。
4.检查点相关配置
HDFS上的Checkpoint默认只保存最近一次,最新的一次保存完成后会将上一次的进行覆;
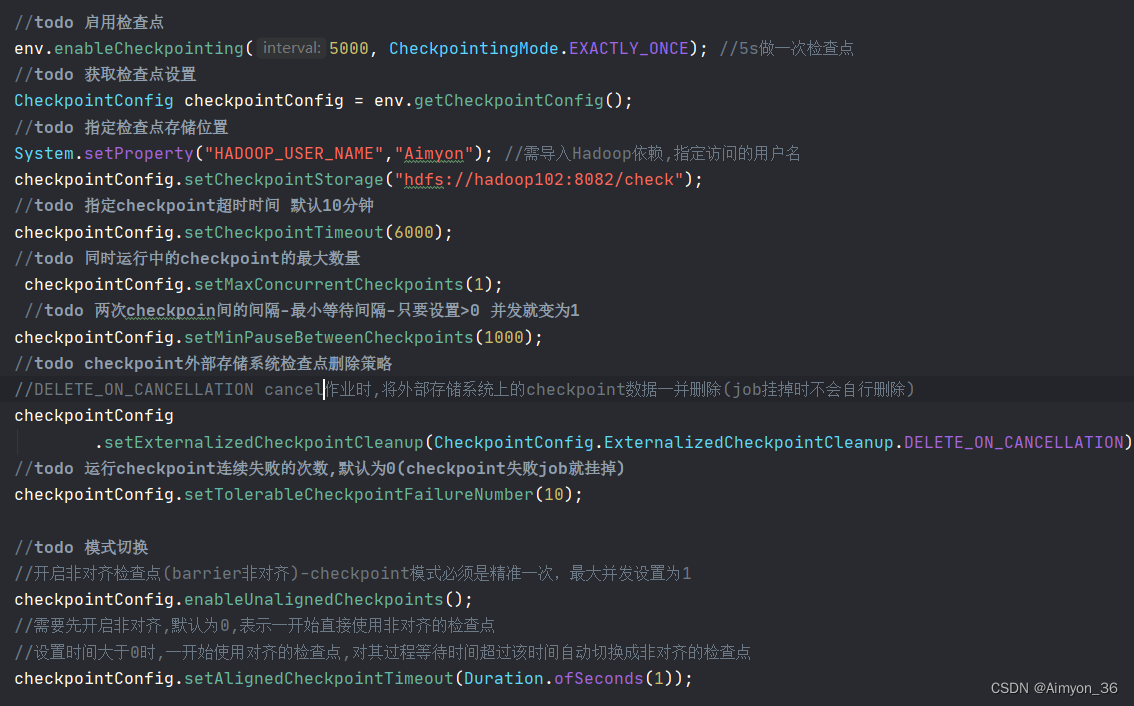
检查点模式(CheckpointingMode)
设置检查点一致性的保证级别,有“精确一次”(exactly-once)和“至少一次”(at-least-once)两个选项。默认级别为exactly-once,而对于大多数低延迟的流处理程序,at-least-once就够用了,而且处理效率会更高。
超时时间(checkpointTimeout)
用于指定检查点保存的超时时间,超时没完成就会被丢弃掉。传入一个长整型毫秒数作为参数,表示超时时间。
最小间隔时间(minPauseBetweenCheckpoints)
用于指定在上一个检查点完成之后,检查点协调器最快等多久可以出发保存下一个检查点的指令。这就意味着即使已经达到了周期触发的时间点,只要距离上一个检查点完成的间隔不够,就依然不能开启下一次检查点的保存。这就为正常处理数据留下了充足的间隙。当指定这个参数时,实际并发为1。
最大并发检查点数量(maxConcurrentCheckpoints)
用于指定运行中的检查点最多可以有多少个。由于每个任务的处理进度不同,完全可能出现后面的任务还没完成前一个检查点的保存、前面任务已经开始保存下一个检查点了。这个参数就是限制同时进行的最大数量。
开启外部持久化存储(enableExternalizedCheckpoints)
用于开启检查点的外部持久化,而且默认在作业失败的时候不会自动清理,如果想释放空间需要自己手工清理。里面传入的参数ExternalizedCheckpointCleanup指定了当作业取消的时候外部的检查点该如何清理。
DELETE_ON_CANCELLATION:在作业取消的时候会自动删除外部检查点,但是如果是作业失败退出,则会保留检查点。
RETAIN_ON_CANCELLATION:作业取消的时候也会保留外部检查点。
检查点连续失败次数(tolerableCheckpointFailureNumber)
用于指定检查点连续失败的次数,当达到这个次数,作业就失败退出。默认为0,这意味着不能容忍检查点失败,并且作业将在第一次报告检查点失败时失败。
非对齐检查点(enableUnalignedCheckpoints)
不再执行检查点的分界线对齐操作,启用之后可以大大减少产生背压时的检查点保存时间。这个设置要求检查点模式(CheckpointingMode)必须为exctly-once,并且最大并发的检查点个数为1。
对齐检查点超时时间(alignedCheckpointTimeout)
该参数只有在启用非对齐检查点的时候有效。参数默认是0,表示一开始就直接用非对齐检查点。如果设置大于0,一开始会使用对齐的检查点,当对齐时间超过该参数设定的时间,则会自动切换成非对齐检查点。
5.通用增量 checkpoint (changelog) 和 保存点(Savepoint)
通用增量 checkpoint (changelog)
在 1.15 之前,只有RocksDB 支持增量快照。不同于产生一个包含所有数据的全量备份,增量快照中只包含自上一次快照完成之后被修改的记录,因此可以显著减少快照完成的耗时。
从 1.15 开始,不管hashmap还是rocksdb 状态后端都可以通过开启changelog实现通用的增量checkpoint。
(1)带状态的算子任务将状态更改写入变更日志(记录状态)
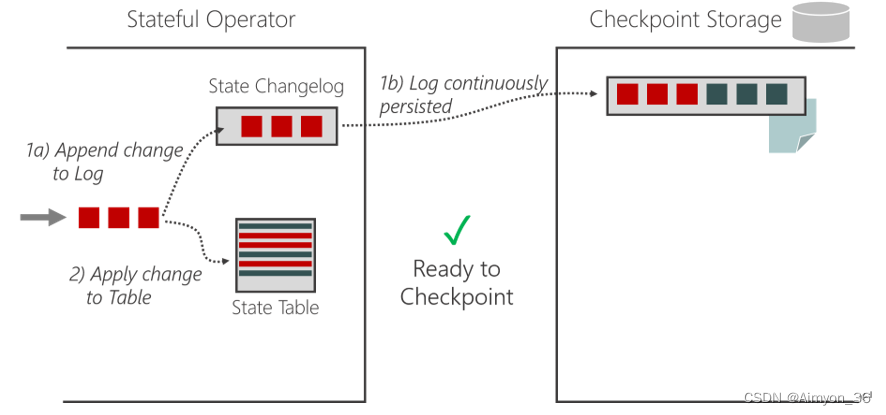
State Changelog存储在TaskManager内存中,类似于Mysql的Binlog日志,像Sum算子这种有状态的算子,每次进行数据更新时都会将更新数据的操作记录到State Changelog,而State Changelog会将记录持续的同步到Checkpoint
(2)状态物化:状态表定期保存,独立于检查点
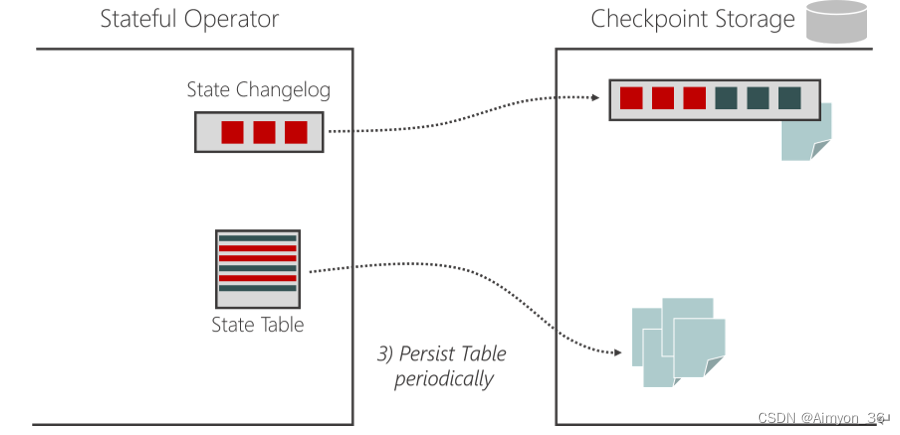
State Table记录的是算子的计算状态结果,会周期性将数据存储到指定的外部存储系统中,其独立于Checkpoint,用来对状态表进行备份。
(3)状态物化完成后,状态变更日志就可以被截断到相应的点
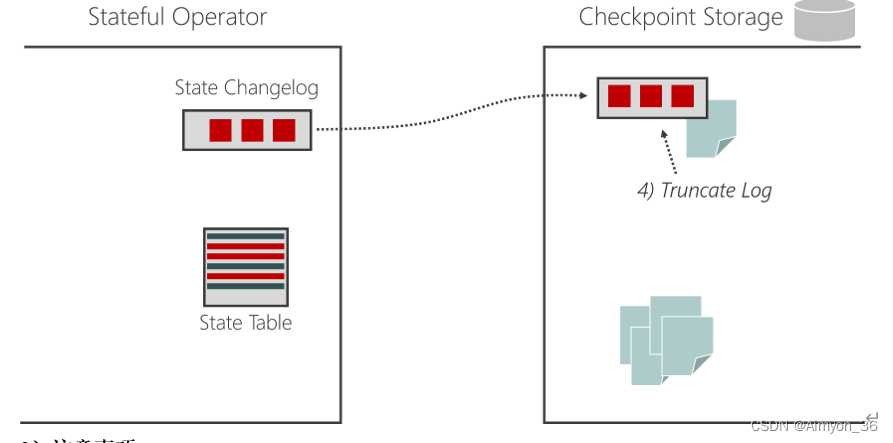
Checkpoint会周期性的对数据进行截断,将其保存的旧数据进行删除。
注意事项
(1)目前标记为实验性功能,开启后可能会造成资源消耗增大:
HDFS上保存的文件数变多
消耗更多的IO带宽用于上传变更日志
更多的CPU用于序列化状态更改
TaskManager使用更多内存来缓存状态更改
(2)使用限制:
Checkpoint的最大并发必须为1
从 Flink 1.15 开始,只有文件系统的存储类型实现可用(memory测试阶段)
不支持 NO_CLAIM 模式
保存点(Savapoint)
除了检查点外,Flink还提供了另一个非常独特的镜像保存功能——保存点(savepoint)。
从名称就可以看出,这也是一个存盘的备份,它的原理和算法与检查点完全相同,只是多了一些额外的元数据。
保存点与检查点最大的区别,就是触发的时机。检查点是由Flink自动管理的,定期创建,发生故障之后自动读取进行恢复,这是一个“自动存盘”的功能;而保存点不会自动创建,必须由用户明确地手动触发保存操作,所以就是“手动存盘”。
保存点可以当作一个强大的运维工具来使用。我们可以在需要的时候创建一个保存点,然后停止应用,做一些处理调整之后再从保存点重启。它适用的具体场景有:
版本管理和归档存储
更新Flink版本
更新应用程序
调整并行度
暂停应用程序
需要注意的是,保存点能够在程序更改的时候依然兼容,前提是状态的拓扑结构和数据类型不变。我们知道保存点中状态都是以算子ID-状态名称这样的key-value组织起来的,算子ID可以在代码中直接调用SingleOutputStreamOperator的.uid()方法来进行指定:
DataStream<String> stream = env
.addSource(new StatefulSource()).uid("source-id")
.map(new StatefulMapper()).uid("mapper-id").name("mymap")
.print();
算子的uid是给程序用来识别的,而name是用户使用自定义的。
对于没有设置ID的算子,Flink默认会自动进行设置,所以在重新启动应用后可能会导致ID不同而无法兼容以前的状态。所以为了方便后续的维护,强烈建议在程序中为每一个算子手动指定ID。
保存点的使用
(1)创建保存点
要在命令行中为运行的作业创建一个保存点镜像,只需要执行:
bin/flink savepoint :jobId [:targetDirectory]
这里jobId需要填充要做镜像保存的作业ID,目标路径targetDirectory可选,表示保存点存储的路径。
对于保存点的默认路径,可以通过配置文件flink-conf.yaml中的state.savepoints.dir项来7设定:
state.savepoints.dir: hdfs:///flink/savepoints
当然对于单独的作业,我们也可以在程序代码中通过执行环境来设置:
env.setDefaultSavepointDir("hdfs:///flink/savepoints");
由于创建保存点一般都是希望更改环境之后重启,所以创建之后往往紧接着就是停掉作业的操作。除了对运行的作业创建保存点,我们也可以在停掉一个作业时直接创建保存点:
bin/flink stop --savepointPath [:targetDirectory] :jobId
(2)从保存点重启应用
我们已经知道,提交启动一个Flink作业,使用的命令是flink run;现在要从保存点重启一个应用,其实本质是一样的:
bin/flink run -s :savepointPath [:runArgs]
这里只要增加一个-s参数,指定保存点的路径就可以了,其它启动时的参数还是完全一样的,如果是基于yarn的运行模式还需要加上 -yid application-id。我们在第三章使用web UI进行作业提交时,可以填入的参数除了入口类、并行度和运行参数,还有一个“Savepoint Path”,这就是从保存点启动应用的配置。
三、端到端的状态一致性
1.一致性的概念和级别
一致性其实就是结果的正确性,一般从数据丢失、数据重复来评估。
流式计算本身就是一个一个来的,所以正常处理的过程中结果肯定是正确的;但在发生故障、需要恢复状态进行回滚时就需要更多的保障机制了。我们通过检查点的保存来保证状态恢复后结果的正确,所以主要讨论的就是“状态的一致性”。
一般说来,状态一致性有三种级别:
最多一次(At-Most-Once)
flink不开启检查点机制时,数据的计算就是最多一次
至少一次(At-Least-Once)
精确一次(Exactly-Once)
我们已经知道检查点可以保证Flink内部状态的一致性,而且可以做到精确一次。
但是完整的流处理应用,应该包括了数据源、流处理器和外部存储系统三个部分。这个完整应用的一致性,就叫做“端到端(end-to-end)的状态一致性”,它取决于三个组件中最弱的那一环。一般来说,能否达到at-least-once一致性级别,主要看数据源能够重放数据;而能否达到exactly-once级别,流处理器内部、数据源、外部存储都要有相应的保证机制
2.端到端精确一次(End-To-End Exactly-Once)
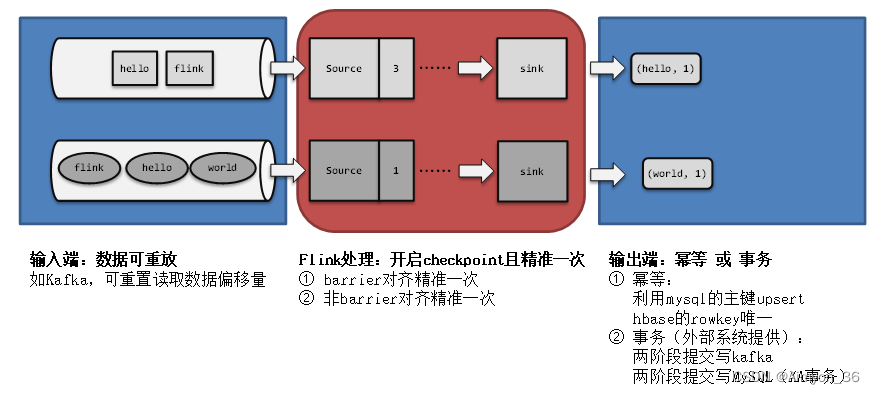
输出端保证
输入端主要指的就是Flink读取的外部数据源。对于一些数据源来说,并不提供数据的缓冲或是持久化保存,数据被消费之后就彻底不存在了,例如socket文本流。对于这样的数据源,故障后我们即使通过检查点恢复之前的状态,可保存检查点之后到发生故障期间的数据已经不能重发了,这就会导致数据丢失。所以就只能保证at-most-once的一致性语义,相当于没有保证。
想要在故障恢复后不丢数据,外部数据源就必须拥有重放数据的能力。常见的做法就是对数据进行持久化保存,并且可以重设数据的读取位置。一个最经典的应用就是Kafka。在Flink的Source任务中将数据读取的偏移量保存为状态,这样就可以在故障恢复时从检查点中读取出来,对数据源重置偏移量,重新获取数据。
**数据源可重放数据,或者说可重置读取数据偏移量,加上Flink的Source算子将偏移量作为状态保存进检查点,就可以保证数据不丢。**这是达到at-least-once一致性语义的基本要求,当然也是实现端到端exactly-once的基本要求。
输出端保证
有了Flink的检查点机制,以及可重放数据的外部数据源,我们已经能做到at-least-once了。但是想要实现exactly-once却有更大的困难:数据有可能重复写入外部系统。
因为检查点保存之后,继续到来的数据也会一一处理,任务的状态也会更新,最终通过Sink任务将计算结果输出到外部系统;只是状态改变还没有存到下一个检查点中。这时如果出现故障,这些数据都会重新来一遍,就计算了两次。我们知道对Flink内部状态来说,重复计算的动作是没有影响的,因为状态已经回滚,最终改变只会发生一次;但对于外部系统来说,已经写入的结果就是泼出去的水,已经无法收回了,再次执行写入就会把同一个数据写入两次。
所以这时,我们只保证了端到端的at-least-once语义。
为了实现端到端exactly-once,我们还需要对外部存储系统、以及Sink连接器有额外的要求。能够保证exactly-once一致性的写入方式有两种:
幂等(Idempotent)写入
“幂等”操作,就是说一个操作可以重复执行很多次,但只导致一次结果更改。也就是说,后面再重复执行就不会对结果起作用了。
需要注意,对于幂等写入,遇到故障进行恢复时,有可能会出现短暂的不一致。因为保存点完成之后到发生故障之间的数据,其实已经写入了一遍,回滚的时候并不能消除它们。如果有一个外部应用读取写入的数据,可能会看到奇怪的现象:短时间内,结果会突然“跳回”到之前的某个值,然后“重播”一段之前的数据。不过当数据的重放逐渐超过发生故障的点的时候,最终的结果还是一致的。
事务(Transactional)写入
事务是应用程序中一系列严密的操作,所有操作必须成功完成,否则在每个操作中所作的所有更改都会被撤消。事务有四个基本特性:原子性、一致性、隔离性和持久性,这就是著名的ACID。
事务写入的基本思想就是:用一个事务来进行数据向外部系统的写入,这个事务是与检查点绑定在一起的。当Sink任务遇到barrier时,开始保存状态的同时就开启一个事务,接下来所有数据的写入都在这个事务中;待到当前检查点保存完毕时,将事务提交,所有写入的数据就真正可用了。如果中间过程出现故障,状态会回退到上一个检查点,而当前事务没有正常关闭(因为当前检查点没有保存完),所以也会回滚,写入到外部的数据就被撤销了。
事务提交是需要外部存储系统支持事务的,否则没有办法真正实现写入的回撤。那对于一般不支持事务的存储系统,能够实现事务写入呢?
(1)预写日志(write-ahead-log,WAL)
①先把结果数据作为日志(log)状态保存起来
②进行检查点保存时,也会将这些结果数据一并做持久化存储
③在收到检查点完成的通知时,将所有结果一次性写入外部系统。
④在成功写入所有数据后,在内部再次确认相应的检查点,将确认信息也进行持久化保存。这才代表着检查点的真正完成。
这种方式类似于检查点完成时做一个批处理,一次性的写入会带来一些性能上的问题;而优点就是比较简单,由于数据提前在状态后端中做了缓存,所以无论什么外部存储系统,理论上都能用这种方式一批搞定。
需要注意的是,预写日志这种一批写入的方式,有可能会写入失败;所以在执行写入动作之后,必须等待发送成功的返回确认消息。在成功写入所有数据后,在内部再次确认相应的检查点,这才代表着检查点的真正完成。这里需要将确认信息也进行持久化保存,在故障恢复时,只有存在对应的确认信息,才能保证这批数据已经写入,可以恢复到对应的检查点位置。
这种“再次确认”的方式,也会有一些缺陷。如果我们的检查点已经成功保存、数据也成功地一批写入到了外部系统,但是最终保存确认信息时出现了故障,Flink最终还是会认为没有成功写入。于是发生故障时,不会使用这个检查点,而是需要回退到上一个;这样就会导致这批数据的重复写入
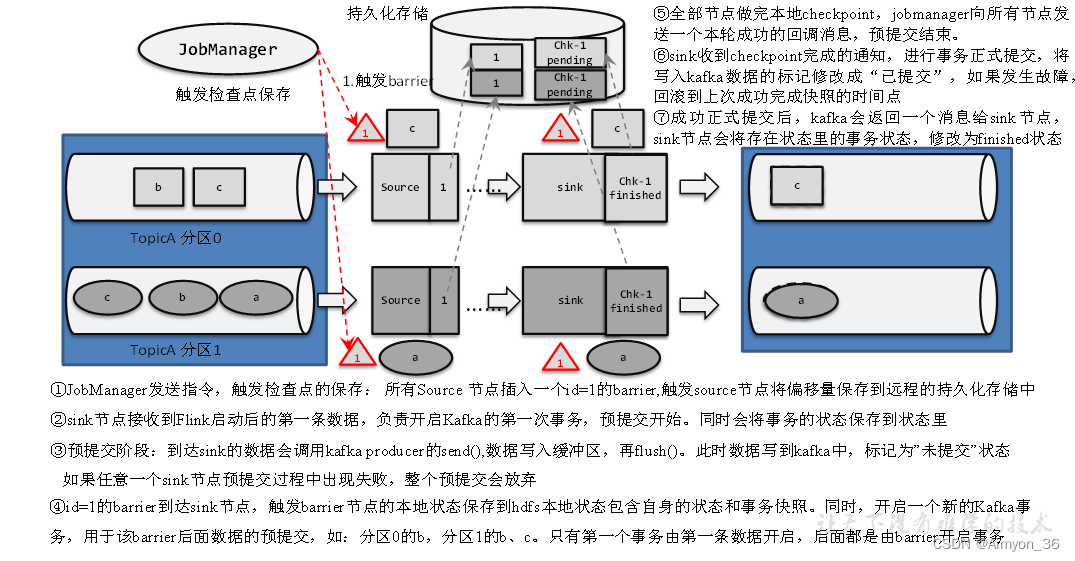
(2)两阶段提交(two-phase-commit,2PC)
顾名思义,它的想法是分成两个阶段:先做“预提交”,等检查点完成之后再正式提交。这种提交方式是真正基于事务的,它需要外部系统提供事务支持。
①当第一条数据到来时,或者收到检查点的分界线时,Sink任务都会启动一个事务。
②接下来接收到的所有数据,都通过这个事务写入外部系统;这时由于事务没有提交,所以数据尽管写入了外部系统,但是不可用,是“预提交”的状态。
③当Sink任务收到JobManager发来检查点完成的通知时,正式提交事务,写入的结果就真正可用了。
当中间发生故障时,当前未提交的事务就会回滚,于是所有写入外部系统的数据也就实现了撤回。这种两阶段提交(2PC)的方式充分利用了Flink现有的检查点机制:分界线的到来,就标志着开始一个新事务;而收到来自JobManager的checkpoint成功的消息,就是提交事务的指令。每个结果数据的写入,依然是流式的,不再有预写日志时批处理的性能问题;最终提交时,也只需要额外发送一个确认信息。所以2PC协议不仅真正意义上实现了exactly-once,而且通过搭载Flink的检查点机制来实现事务,只给系统增加了很少的开销。
两阶段提交虽然精巧,却对外部系统有很高的要求。这里将2PC对外部系统的要求列举如下:
外部系统必须提供事务支持,或者Sink任务必须能够模拟外部系统上的事务。
在检查点的间隔期间里,必须能够开启一个事务并接受数据写入。
在收到检查点完成的通知之前,事务必须是“等待提交”的状态。在故障恢复的情况下,这可能需要一些时间。如果这个时候外部系统关闭事务(例如超时了),那么未提交的数据就会丢失。
Sink任务必须能够在进程失败后恢复事务。
提交事务必须是幂等操作。也就是说,事务的重复提交应该是无效的。
四、 端到端(end-to-end)精确一次保证
完整的流处理应用,应该包括了数据源、流处理器和外部存储系统三个部分。这个完整应用的一致性,就叫做“端到端(end-to-end)的状态一致性”,它取决于三个组件中最弱的那一环。一般说,能否达到at-least-once一致性级别,主要看数据源能够重放数据;而能否达到exactly-once级别,流处理器内部、数据源、外部存储都要有相应的保证机制。
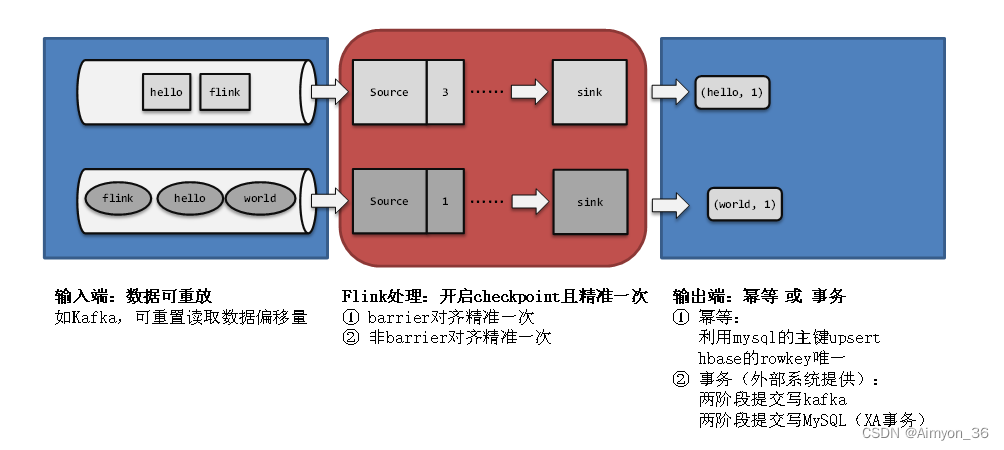
- 输入端:
- 主要指的就是Flink读取的外部数据源。
- 输入端数据源必须拥有重放数据的能力,这样才能在事故后重新获取数据。(精准一次的基本要求)
- 输出端:
- 主要指的是Flink输出到外部的数据接收源 。
- 即使Flink能够在事故后重现数据的消费情况,但是写入的结果就算泼出去的水,再次执行写入就会把同一个数据写入两次。
- 为了保证at-least-once语义,需要Sink端具有幂等写入或事务写入支持,即即使多次写入也只有一次更改和要么写入成功要么写入失败。
(1)Flink内部
Flink内部可以通过检查点机制保证状态和处理结果的exactly-once语义。
(2)输入端
输入数据源端的Kafka可以对数据进行持久化保存,并可以重置偏移量(offset)。所以我们可以在Source任务(FlinkKafkaConsumer)中将当前读取的偏移量保存为算子状态,写入到检查点中;当发生故障时,从检查点中读取恢复状态,并由连接器FlinkKafkaConsumer向Kafka重新提交偏移量,就可以重新消费数据、保证结果的一致性了。
(3)输出端
输出端保证exactly-once的最佳实现,当然就是两阶段提交(2PC)。作为与Flink天生一对的Kafka,自然需要用最强有力的一致性保证来证明自己。
也就是说,我们写入Kafka的过程实际上是一个两段式的提交:处理完毕得到结果,写入Kafka时是基于事务的“预提交”;等到检查点保存完毕,才会提交事务进行“正式提交”。如果中间出现故障,事务进行回滚,预提交就会被放弃;恢复状态之后,也只能恢复所有已经确认提交的操作。
附: 保存点(Savepoint)
除了检查点外,Flink还提供了另一个非常独特的镜像保存功能——保存点(savepoint)。
从名称就可以看出,这也是一个存盘的备份,它的原理和算法与检查点完全相同,只是多了一些额外的元数据。
- 保存点的用途
- 保存点与检查点最大的区别,就是触发的时机。检查点是由Flink自动管理的,定期创建,发生故障之后自动读取进行恢复,这是一个“自动存盘”的功能;而保存点不会自动创建,必须由用户明确地手动触发保存操作,所以就是“手动存盘”。
- 保存点可以当作一个强大的运维工具来使用。我们可以在需要的时候创建一个保存点,然后停止应用,做一些处理调整之后再从保存点重启。它适用的具体场景有:
版本管理和归档存储
更新Flink版本
更新应用程序
调整并行度
暂停应用程序 - 需要注意的是,保存点能够在程序更改的时候依然兼容,前提是状态的拓扑结构和数据类型不变。保存点中状态都是以算子ID-状态名称这样的key-value组织起来的