一.写作背景
本文主要是记录自己在学习STM32输入捕获的经验,方便后续查找和回忆,同时也可以帮助像我一样的单片机小白快速学习相关知识。
二.相关知识
本文主要是利用STM32CubeMX搭配Keil5来实现输入捕获,从而达到对输入信号的高电平进行时长计算并通过串口将数据发送到电脑。那么如何通过定时器对输入信号进行捕获,对信号捕获后又怎样算出时间呢?
①用到的函数:
(1)定时器部分
HAL_TIM_PeriodElapsedCallback(); /* 定时器溢出中断回调函数 */
HAL_TIM_IC_CaptureCallback(); /* 定时器捕获中断回调函数 */
HAL_TIM_Base_Start_IT(); /* 开启定时器中断 */
HAL_TIM_IC_Start_IT(); /* 开启定时器捕获中断 */
HAL_TIM_IC_Stop_IT(); /* 关闭定时器捕获中断 */
(2)串口部分
在串口方面,为了更方便的发送信息,在这里我重定向了串口的发送函数,使用printf就能实现从单片机向电脑发送数据
②输入信号捕获和时间的计算
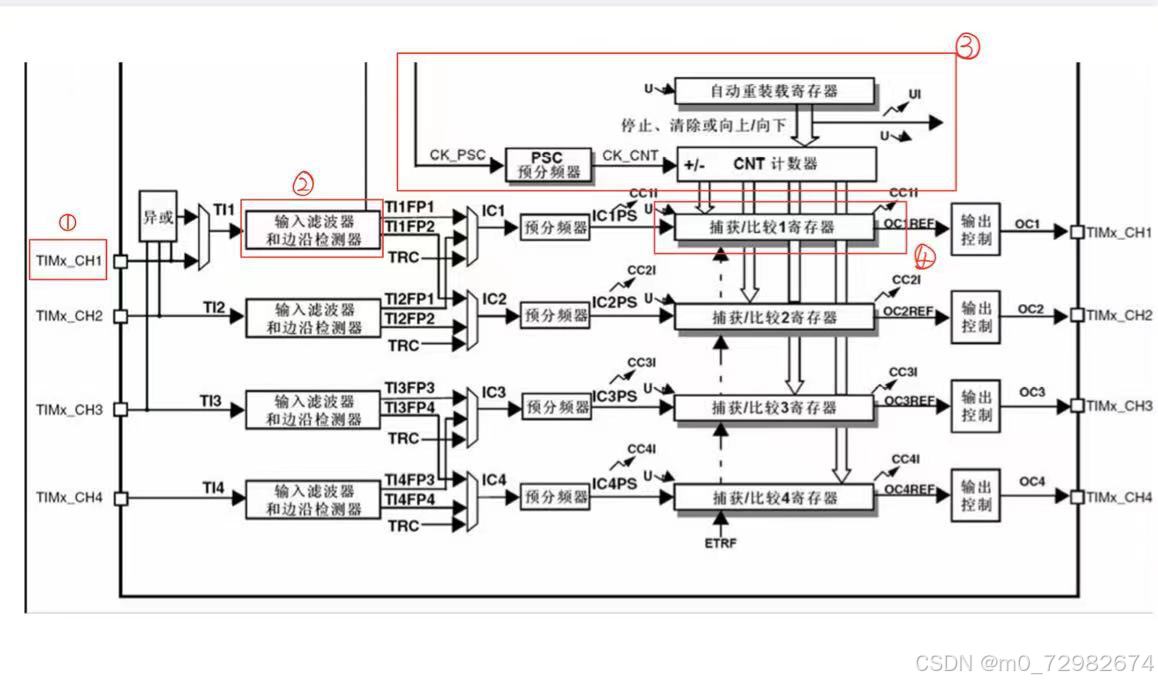
如上图,信号通过①号引脚输入,在经过边沿检测器后(可以在CubeMX里设置上升沿检测/下降沿检测/上升和下降沿都检测),以设置上升沿检测为例,当检测到输入信号的上升沿后,输入捕获寄存器(即④)会将此时③号里的CNT计数器的值记录下来(此时我们可以从寄存器里取出这个值,并存储起来),之后如果不在代码里改变边沿检测器的检测状态(可以使用__HAL_TIM_SET_CAPTUREPOLARITY函数来手动改变边沿检测的值),那么在下一个上升沿到来时,输入捕获寄存器又会记录此时的CNT计数器的值,我们可以取出后与第一次记录的值相减,就可以得到此时输入信号的一个周期,当然相减得到的只是数值之差,还要乘上每记一个数所消耗的时间,才是真的周期,我们记第一次捕获的CNT的值为cap_val1,第二次捕获到的CNT的值为cap_val2,那么一个周期所占的数值是t=cap_val2 - cap_val1,真正的周期是T=t*m(m=(PSC+1)/CK_PSC),在下面配置CubeMX时我还会具体举例一下,大家先记住这个公式。
当然,上面讲的是计算一个信号的周期,下面我们讲一下计算一个信号的高电平持续的时间(后续配置也将以此为例)
相信大家肯定已经想到了,只要我刚开始在CubeMX里将输入捕获寄存器配置为上升沿捕获,之后再代码运行时再将其改为下降沿捕获,就可以实现对高电平的计数,最后再乘上m(m=(PSC+1)/CK_PSC)的值就行了,就如同下图所示

三.新问题的出现(定时器溢出)
以上的所有想法在计时器没有溢出之前都是正确的,但是在溢出之后,就会变得错误,为此我们必须考虑计时器的溢出(这也是我当时看了好久都没搞懂的地方)
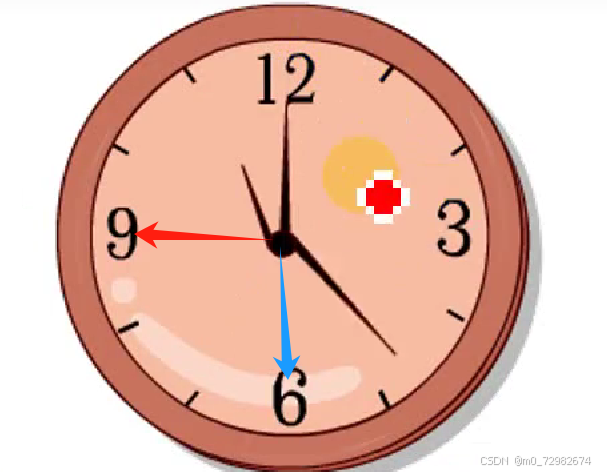
首先,想象一个时钟(如下图),当指针从6走到9的时候,它有可能只转了一圈(即45-30=15分钟),此时就对应没有溢出的情况,也有可能它已经转了一圈(即45-30+60=75分钟),这时就已经是溢出了。
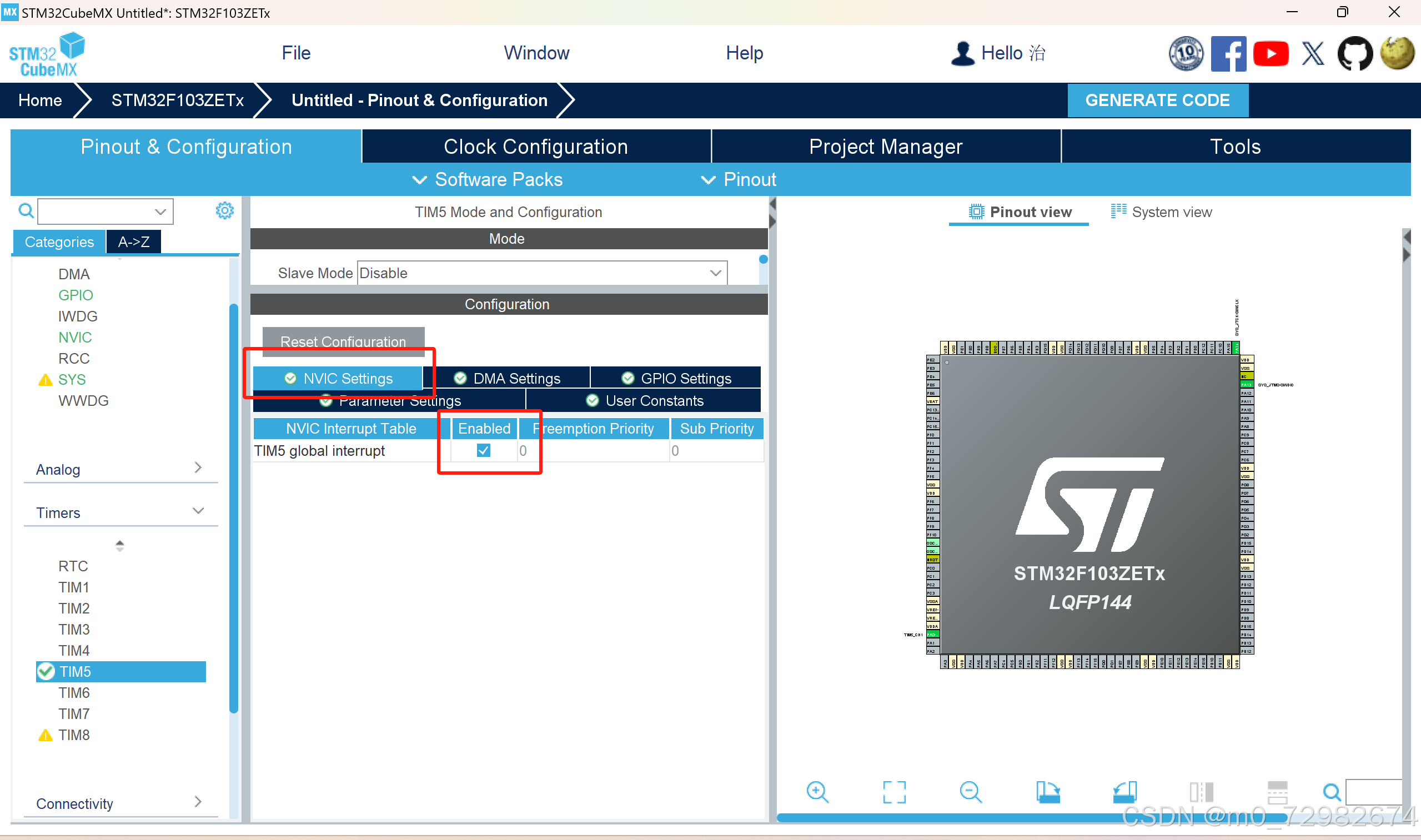
相应的,我们的单片机在CNT计数时,也有一个自己的最大时间(即周期,当然是在设置重装载开启的情况下),假设CK_PSC=72MHz,PSC=7200-1,CNT的最大值我们设置为65535,则每次计时的最大时间是(65535+1)*m,m=(PSC+1)/CK_PSC=0.1ms,那么计时的最大时间就是6.55s左右,当每次高电平持续的时间大于6.55s之后,再单纯的用上面的一系列公式就会得到错误的结果,假设我们已经知道溢出次数是count次,那么这时高低电平之间的计数值t=count*65536+cap_val2 - cap_val1,高电平持续的时间high_time=t*m。但是我们怎么知道count的值呢,答案就在HAL_TIM_PeriodElapsedCallback()这个函数里,定时器每次溢出后,就会调用它,我们只要在这个函数里让count++就行。至此,我们通过输入捕获计算信号高电平的持续时间在理论上就走通了,接下来我们就进入STM32CubeMX配置。
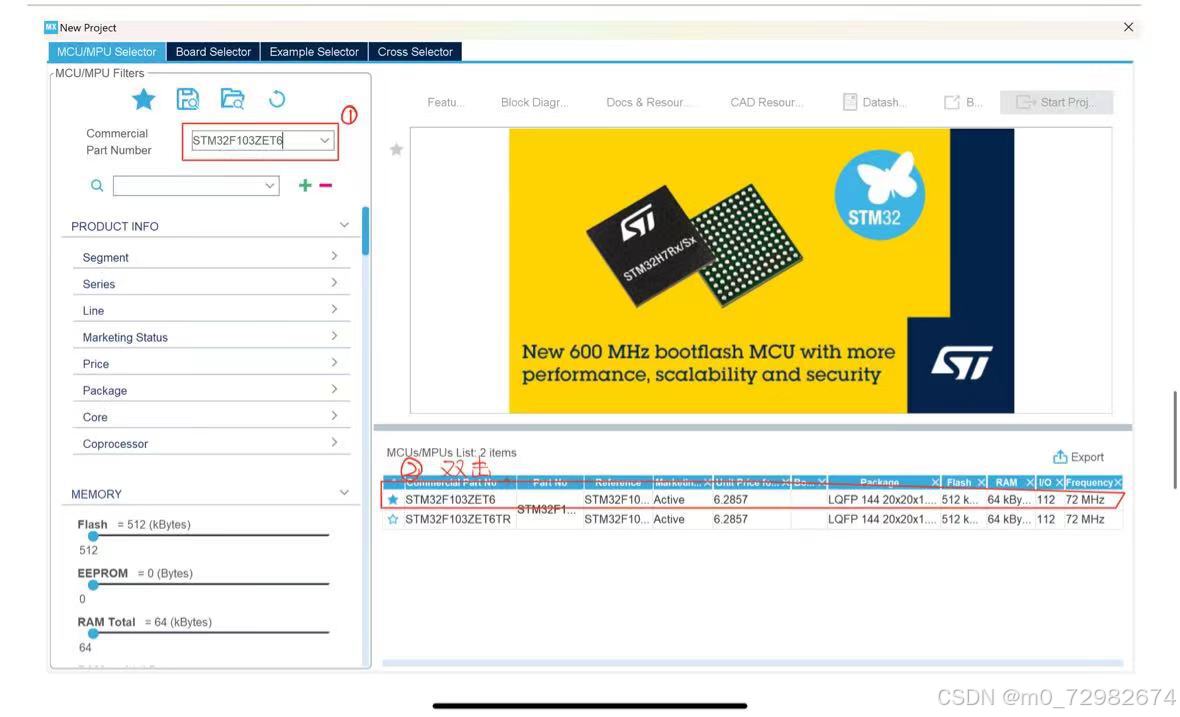
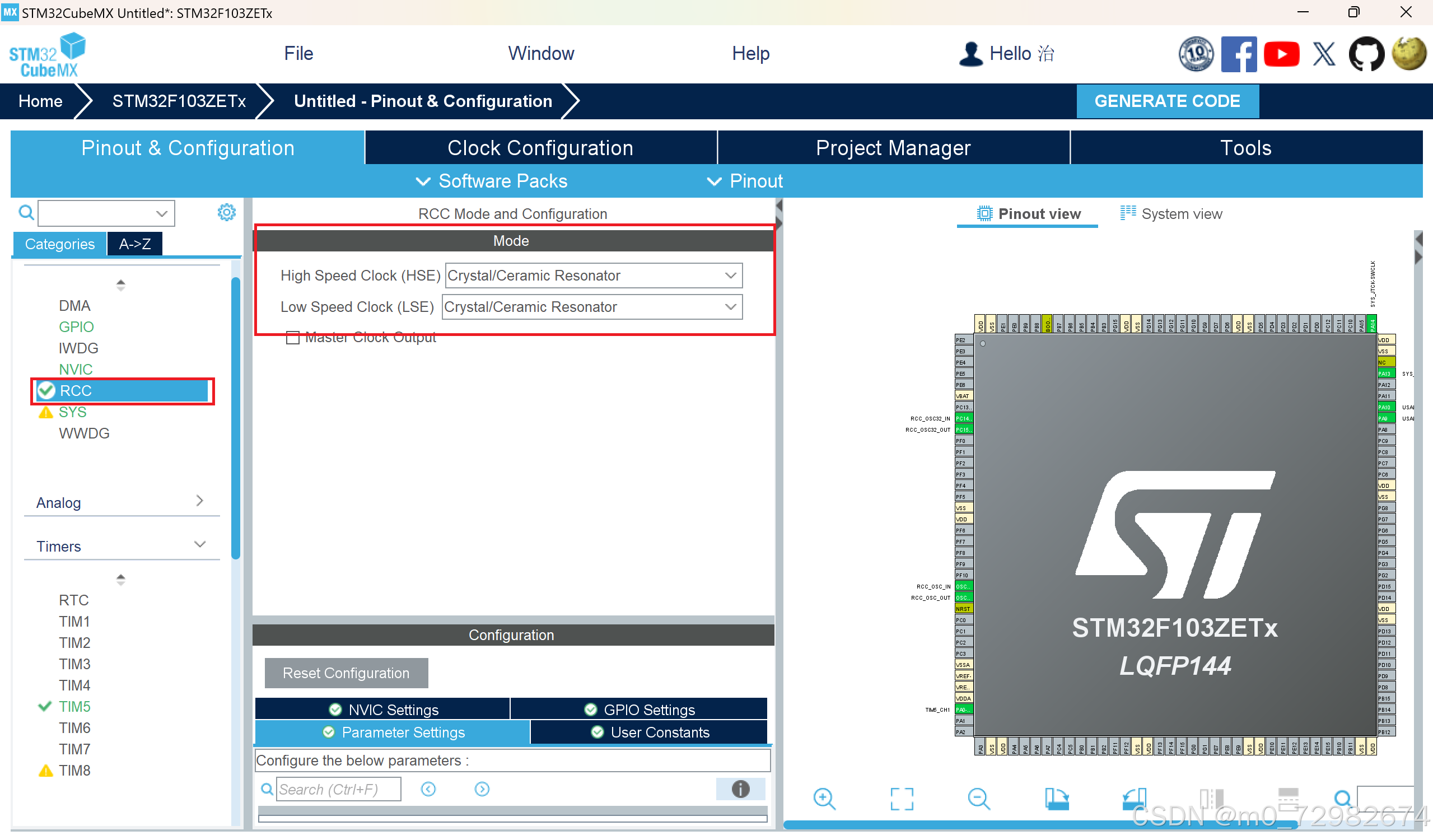
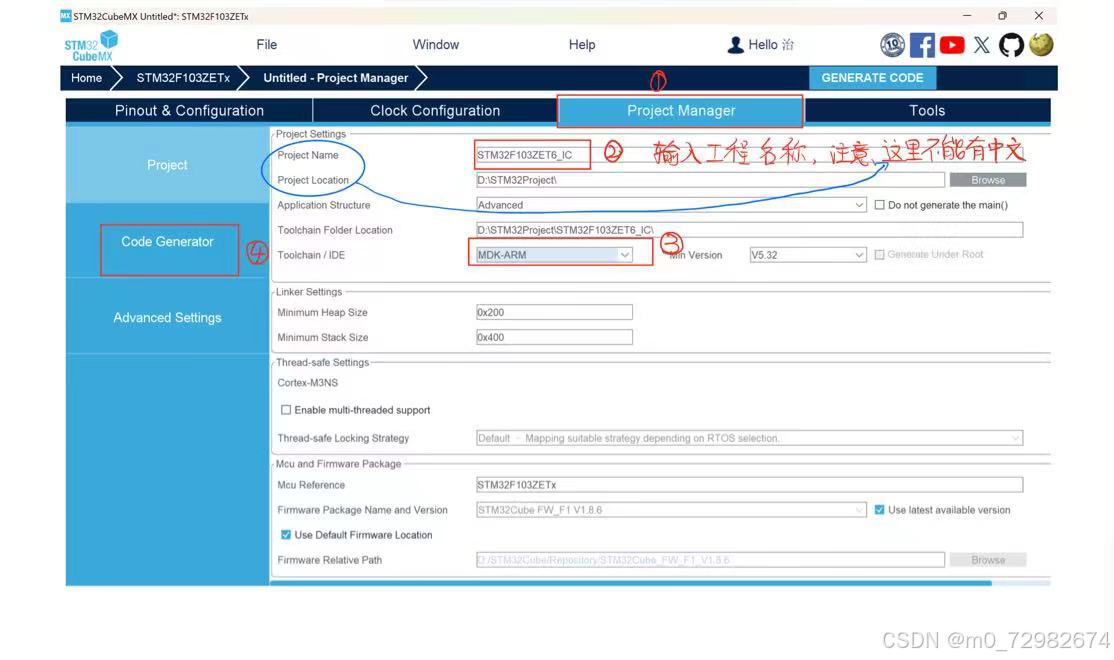
四.STM32CubeMX配置

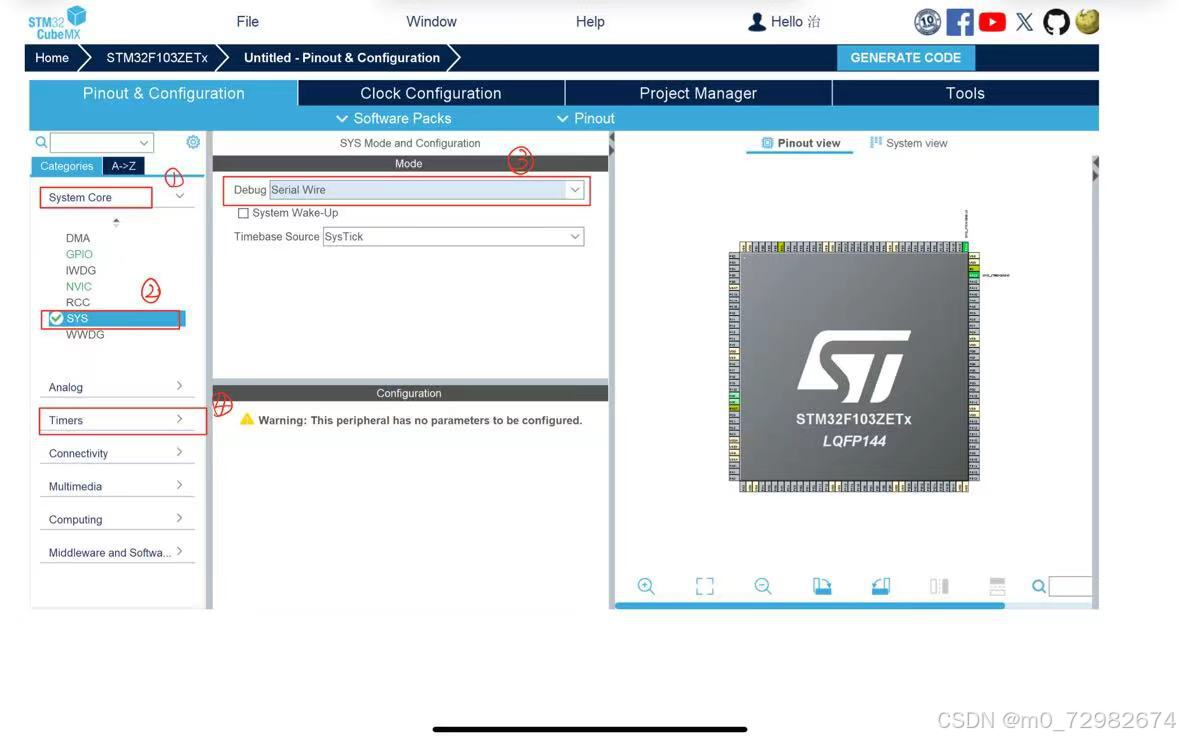
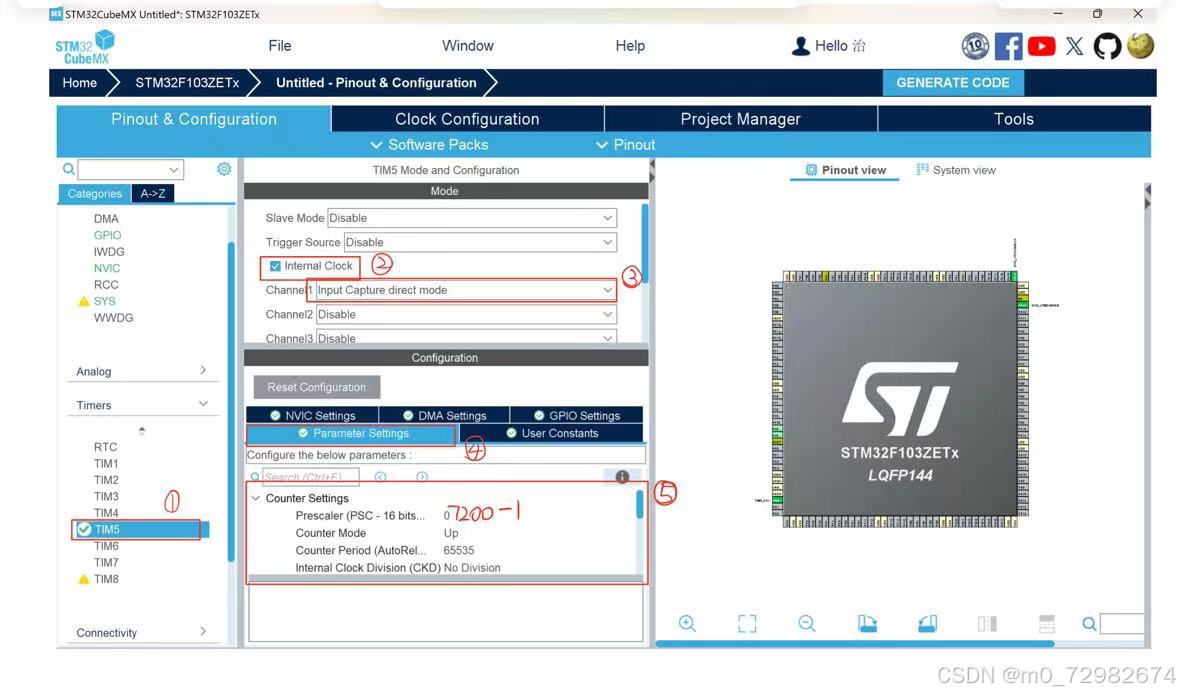
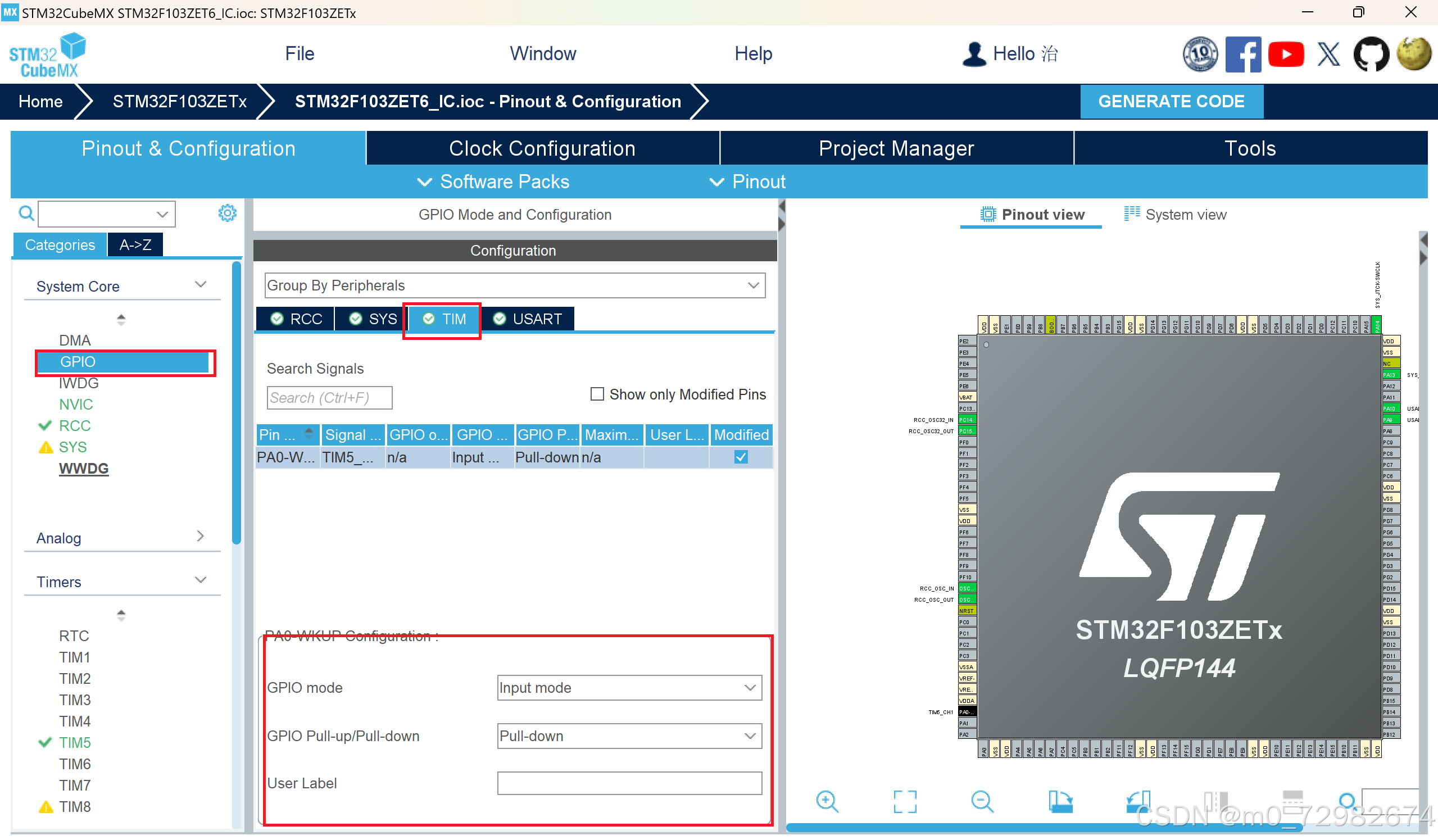
配置时钟


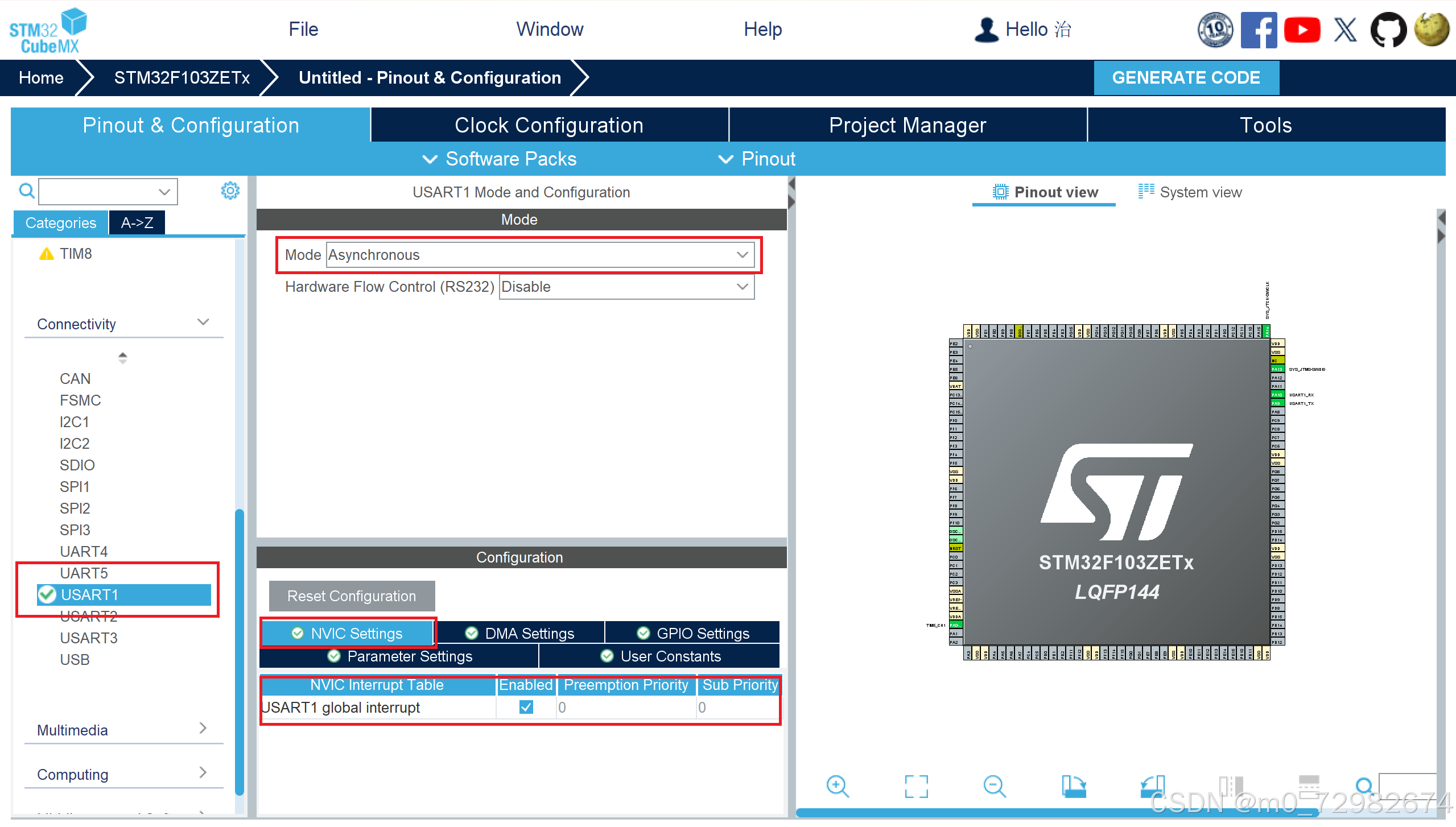
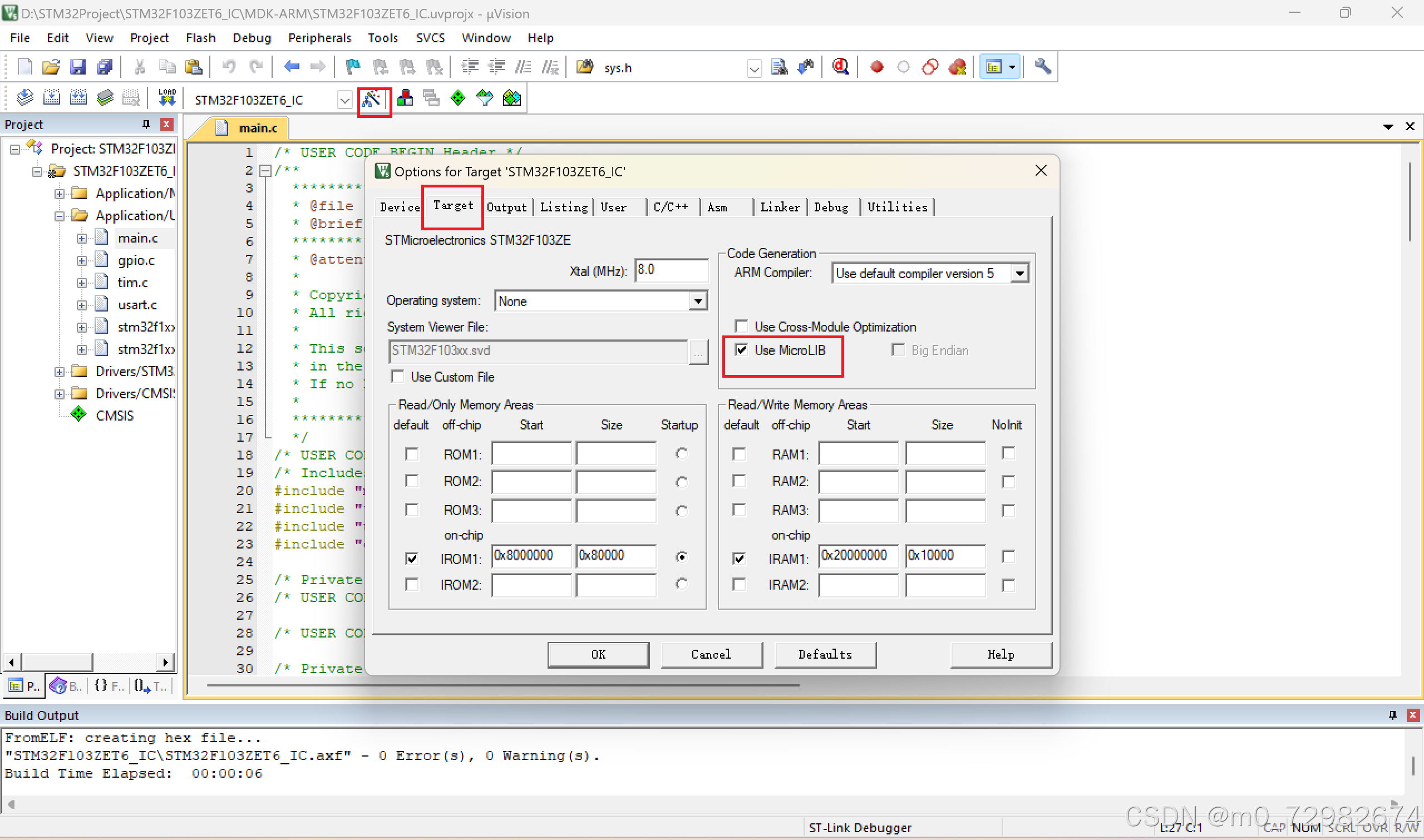
五.Keil5配置
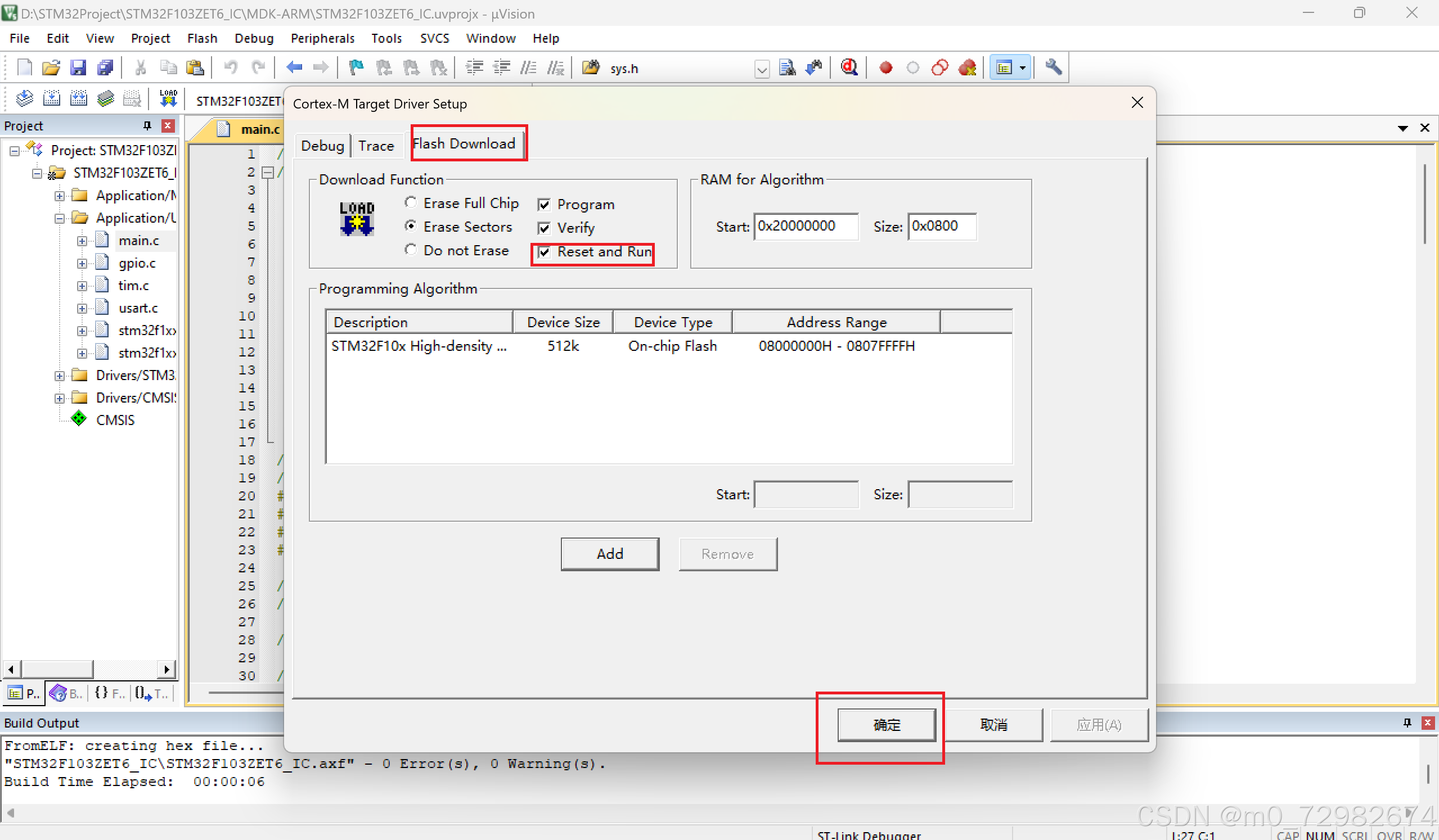
这步配置是为了后续使用printf
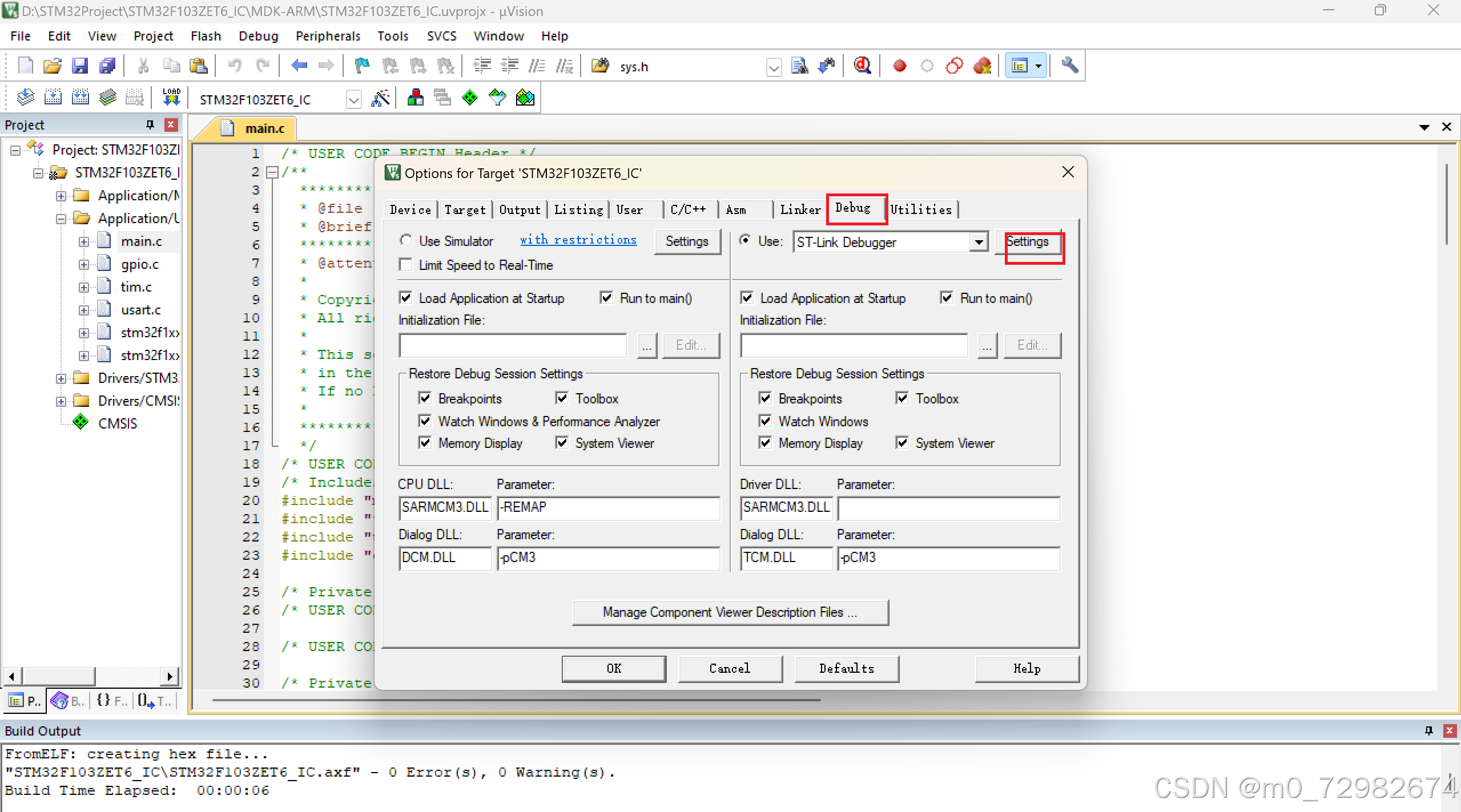
配置自动复位,下载程序后单片机可直接运行
六.代码
①printf重定向代码
#include "stdio.h"
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1,(uint8_t*)&ch,1,0XFF);
return ch;
}②开启定时器中断和输入捕获中断
HAL_TIM_Base_Start_IT(&htim5);
HAL_TIM_IC_Start_IT(&htim5,TIM_CHANNEL_1);③变量定义和while循环
uint8_t state=0;
uint16_t cap_val[2]={0};
long high_time=0;
uint16_t count=0;
if(state==0)
{
HAL_TIM_IC_Start_IT(&htim5,TIM_CHANNEL_1);
__HAL_TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_RISING);
count=0;
}
else if(state==2)
{
high_time=65536*count+cap_val[1]-cap_val[0];
printf("High Time is : %.1f s\r\n",(float)high_time/10000);
state=0;
}
HAL_Delay(500);④输入捕获的回调函数以及定时器溢出的回调函数
/* 捕获中断回调函数 */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim==&htim5)
{
if(state==0)
{
cap_val[0]=HAL_TIM_ReadCapturedValue(&htim5,TIM_CHANNEL_1);
__HAL_TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_FALLING);
state=1;
}
else if(state==1)
{
cap_val[1]=HAL_TIM_ReadCapturedValue(&htim5,TIM_CHANNEL_1);
HAL_TIM_IC_Stop_IT(&htim5,TIM_CHANNEL_1);
state=2;
}
}
}
/* 溢出处理函数 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==&htim5)
{
count++;
}
}⑤总体代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1,(uint8_t*)&ch,1,0XFF);
return ch;
}
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t state=0;
uint16_t cap_val[2]={0};
long high_time=0;
uint16_t count=0;
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM5_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim5);
HAL_TIM_IC_Start_IT(&htim5,TIM_CHANNEL_1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(state==0)
{
HAL_TIM_IC_Start_IT(&htim5,TIM_CHANNEL_1);
__HAL_TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_RISING);
count=0;
}
else if(state==2)
{
high_time=65536*count+cap_val[1]-cap_val[0];
printf("High Time is : %.1f s\r\n",(float)high_time/10000);
state=0;
}
HAL_Delay(500);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* 捕获中断回调函数 */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim==&htim5)
{
if(state==0)
{
cap_val[0]=HAL_TIM_ReadCapturedValue(&htim5,TIM_CHANNEL_1);
__HAL_TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_FALLING);
state=1;
}
else if(state==1)
{
cap_val[1]=HAL_TIM_ReadCapturedValue(&htim5,TIM_CHANNEL_1);
HAL_TIM_IC_Stop_IT(&htim5,TIM_CHANNEL_1);
state=2;
}
}
}
/* 溢出处理函数 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==&htim5)
{
count++;
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
七.实验现象
本人使用的时正点原子战舰开发板,最后实验现象为长按KEY_UP键,松手后,在电脑的串口助手上显示按键按下的时间(即高电平持续的时间),若大家有使用江协科技的stm32最小系统板的,也可以将按键一端插在PA0口,一端插在面包板电源正极(能实现按下按键后PA0输入为高电平即可),硬件连接方面本人不再赘述,这也是本人的第一篇博客,祝大家都能从中学到自己想要的东西,复现出实验结果,若文章有误,希望大家及时指出,感谢!
2024.09.15 22:44