前言
GNSS与INS具有很好的互补性,GNSS提供的位置结果不随时间发散,能够抑制惯导的误差累积,INS能在GNSS拒止环境下提供短时高精度的定位结果,GNSS/INS组合导航系统能充分发挥两系统的优势。与GNSS/INS紧组合系统相比,松组合的两个子系统相互不影响,拥有较强的稳定性,在车载组合导航领域应用广泛。本文简单整理了GNSS/INS松组合算法,里面参考了多本书籍并有些自己的理解,如若有误,还请告知一下,感激不尽。
GNSS/INS松组合状态模型
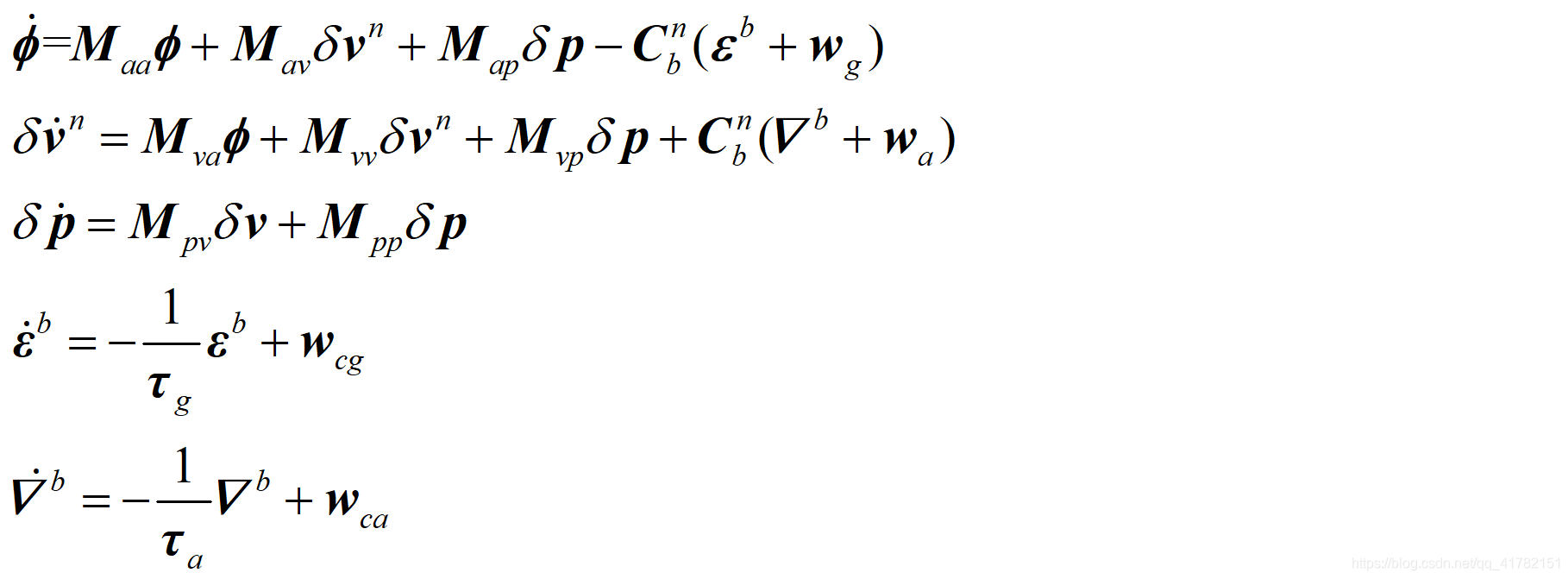
基于捷联惯导系统(SINS)误差模型,加入陀螺及加表的零偏白噪声wg,wa,陀螺及加表零偏建模为一阶马尔科夫过程,wcg,wca为对应的过程白噪声,INS误差模型可以整理如下:
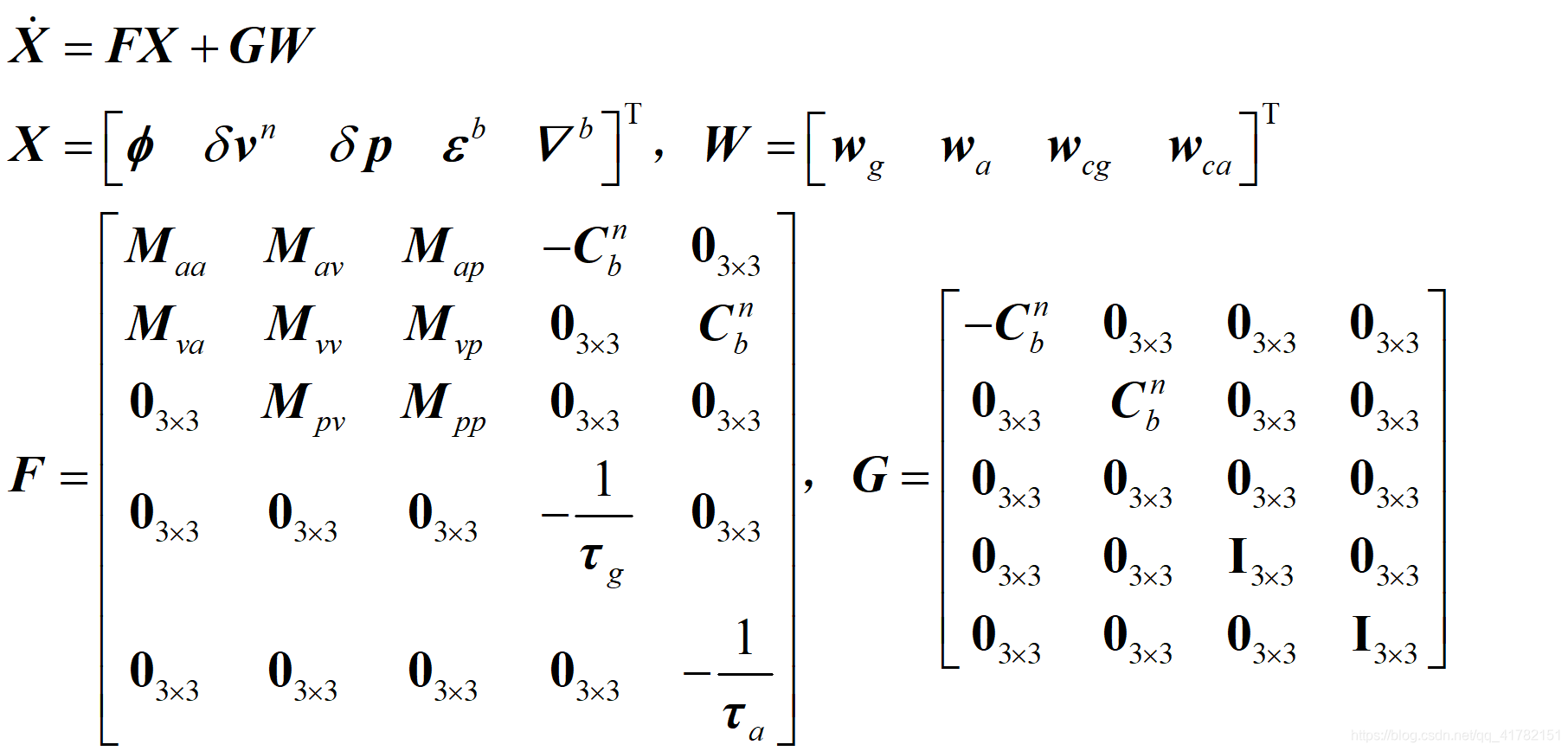
根据上述模型,我们可以构建GNSS/INS松组合的状态模型:
GNSS/INS松组合量测模型
松组合系统采用n系(东北天)下SINS解算的位置与GNSS测量的位置之差作为量测信息,假设IMU到GNSS天线的杆臂向量为0,即GNSS天线与IMU的位置重合。
SINS解算的位置可表示为:
GNSS得到的位置可表示为:
则,位置量测:
转换到大地坐标系LLA(纬经高),得:




GNSS/INS松组合卡尔曼滤波
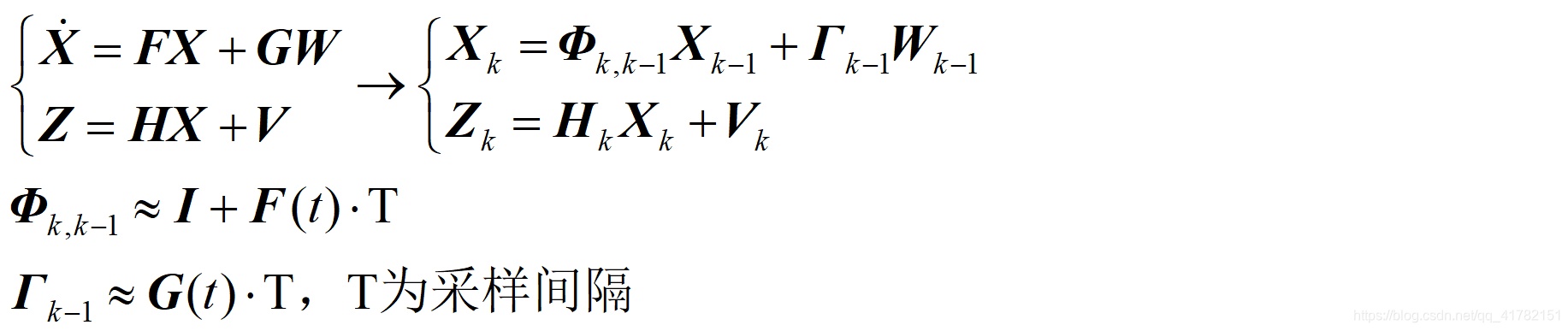
1、松组合模型离散化
2、卡尔曼滤波时间更新

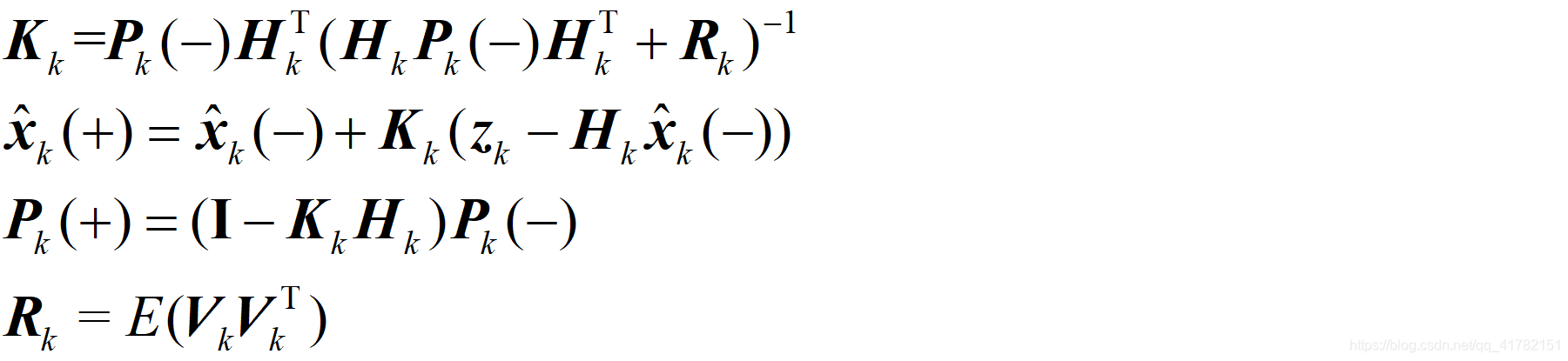
3、卡尔曼滤波量测更新
注意我们这里的状态量是位置(姿态,速度)误差,将其补偿到位置(姿态,速度)量上后,误差就变为0了,所以这里的状态量要手动置零。