前言
前言:好久没有发布文章,因为工作通勤时间太长,所以水个文章,上个季度参加了汽车学堂的一个规划控制算法的培训课,因为课上就是基于Apollo5.0做的相关的讲解,正好就此机会去简单了解了一下 apollo 中行车相关的全局路径规划和 pncmap 还有参考线相关处理 ,纯纯个人理解,如有不对,希望纠正!!!话不多说直接开始 ,再说一句这回依旧是截图的方式,因为本人是采用印象笔记进行记录!!就生成对用PDF。如果感兴趣可以私聊!!!!这就开干 !!!
中间会参考其他人的东西
还有一件事就是 对照代码更好一些!!!!
因为全局规划 、pncmap 、参考线提供者 比较绕!!!
容易绕晕了!!!
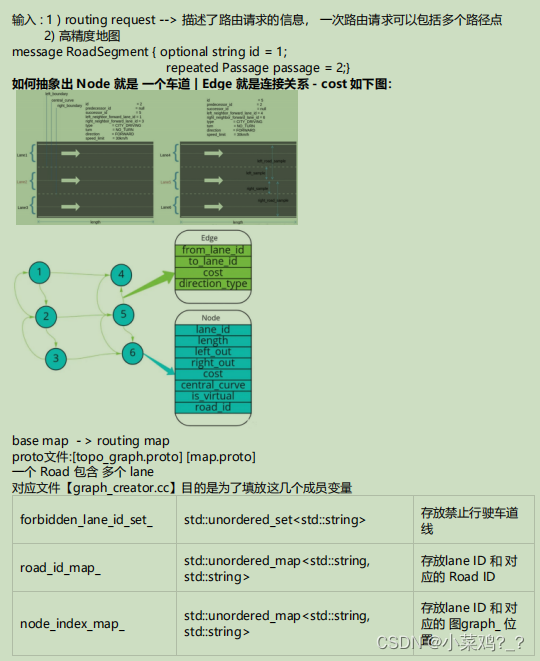
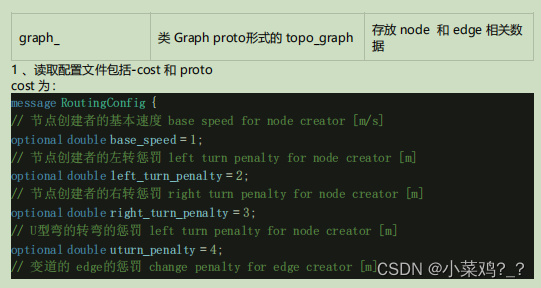
一、地图转换
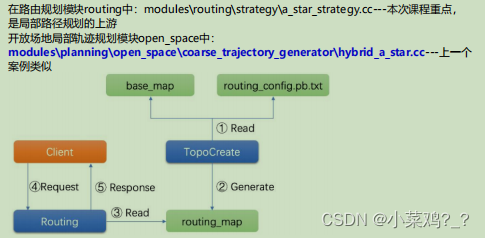
[routing/topo_creator/topo_creator.h]
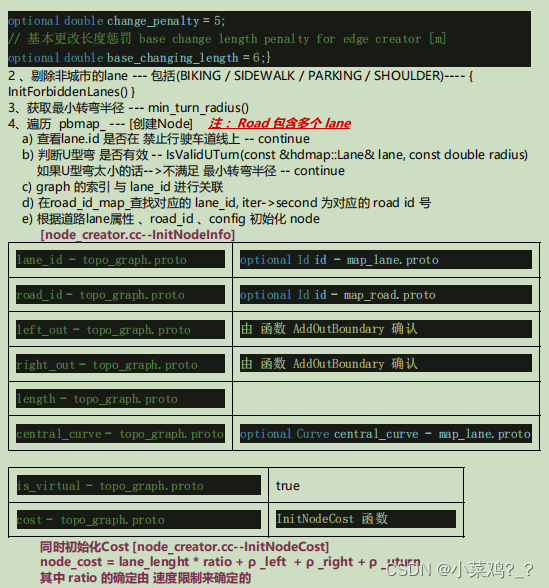
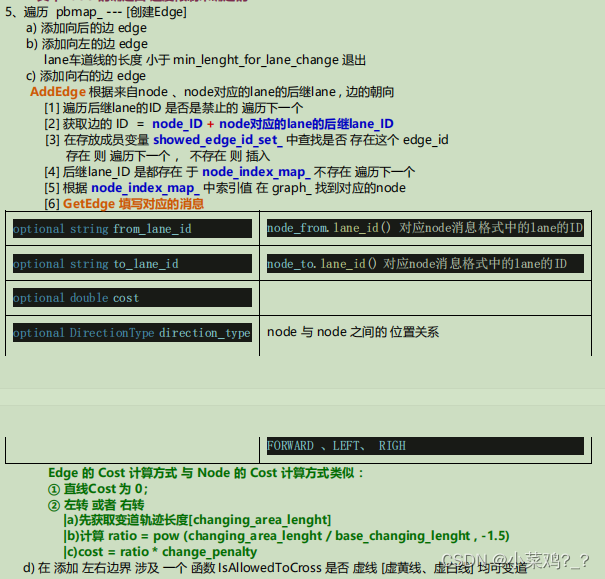
主要是将高精度地图的格式转换为内部的地图格式 [topo_creator.cc 的 main函数进入 ]
1. 主要流程
1.2 一些主流程调用的函数
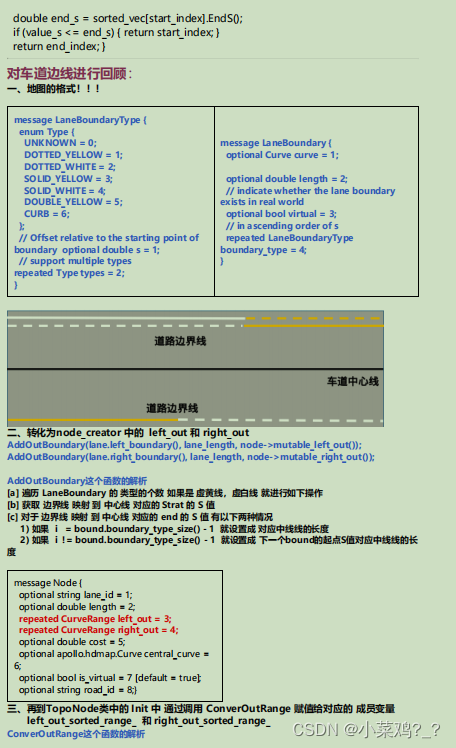
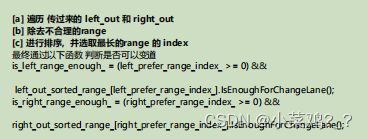
1.2.1 AddOutBoundary

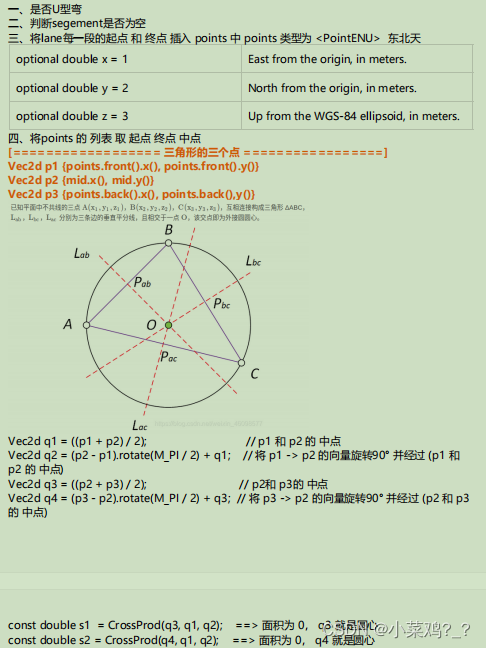
1.2.2 IsValidUTurn
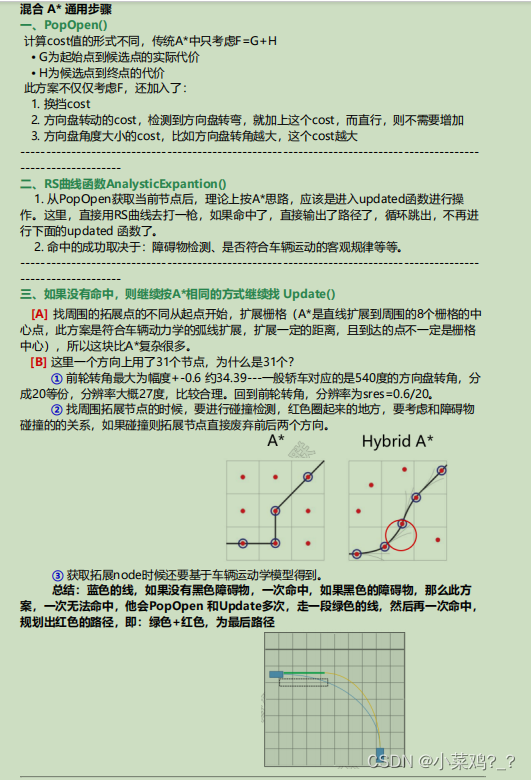
二、全局路径规划
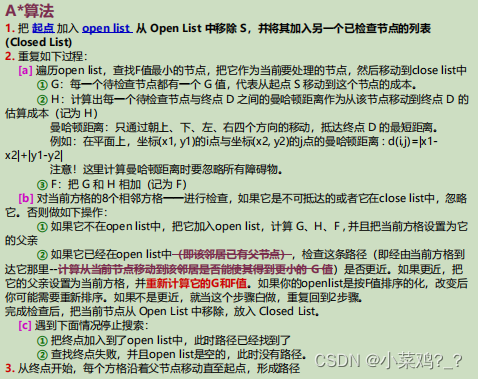
1. A星算法流程 和 基本原理
2. A星算法前处理
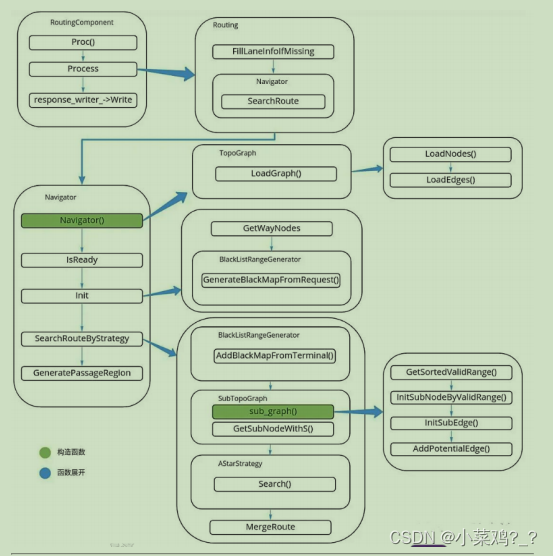
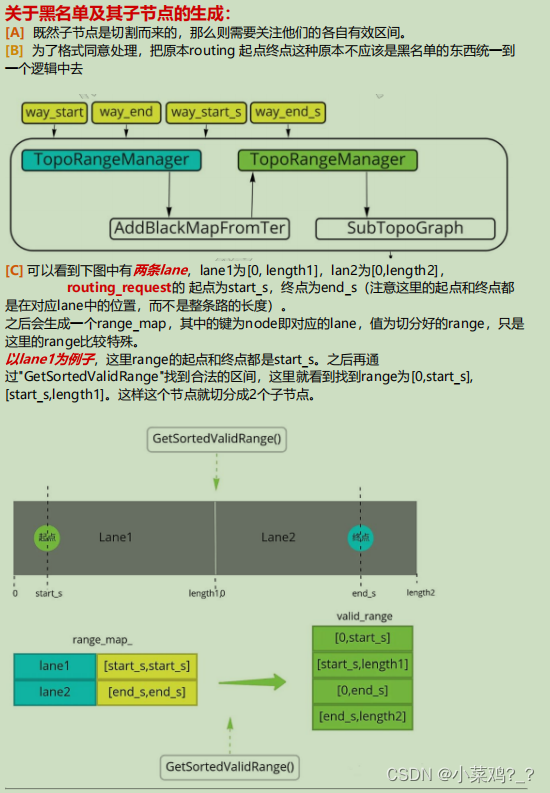
3. A星算法前处理代码阅读
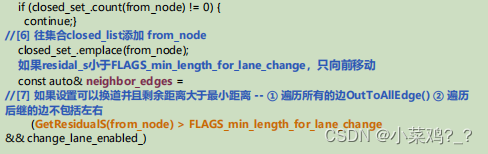
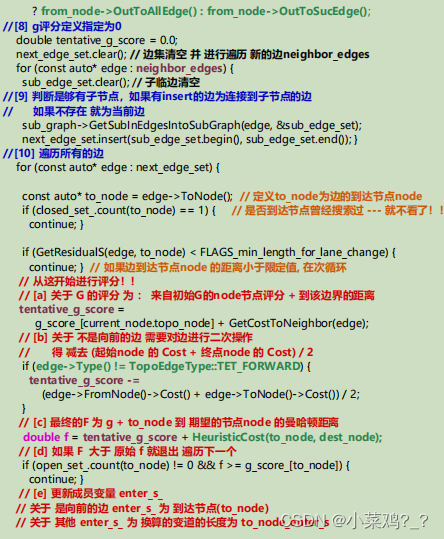
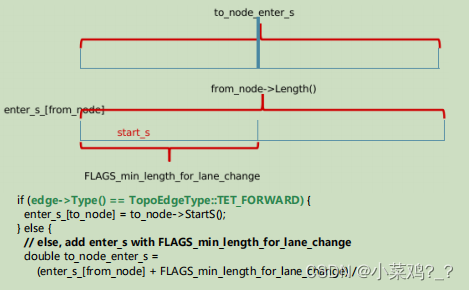
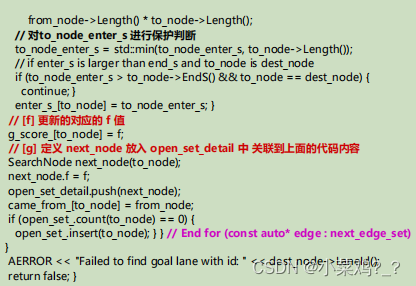
4. A星代码阅读
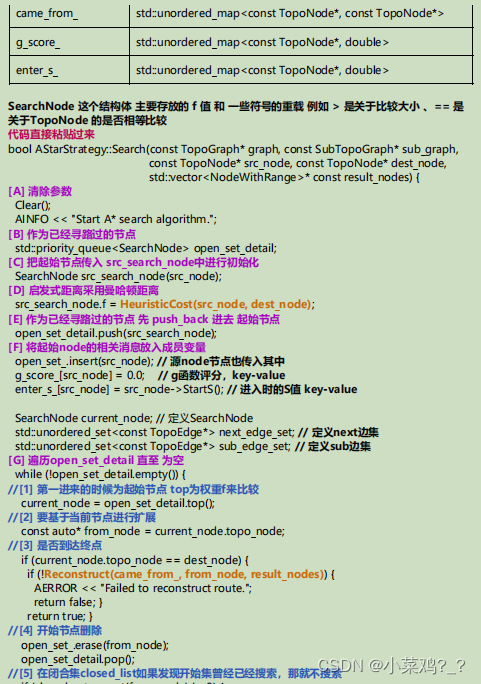
5. A星代码总结
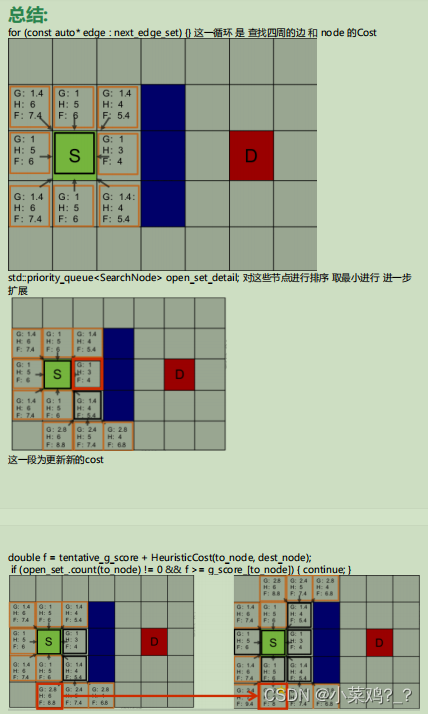
6. A星代码中调用一些函数和结构体
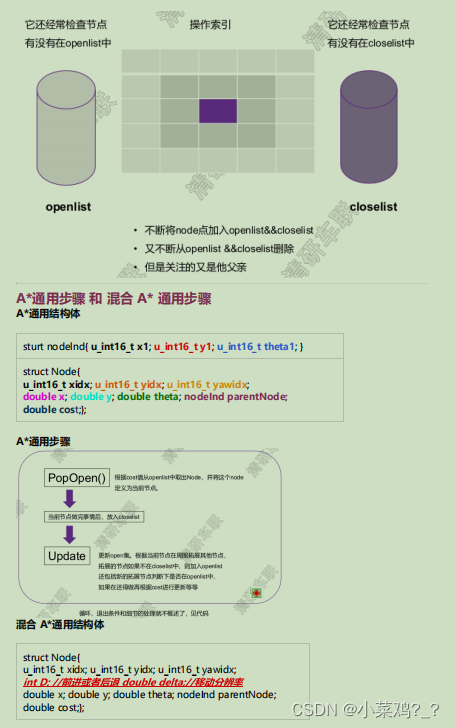
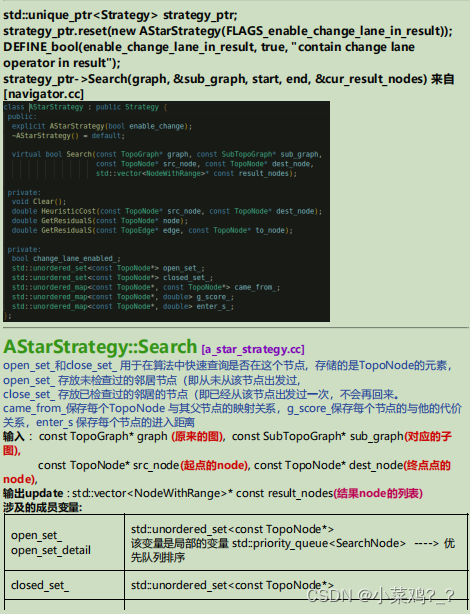
6.1 结构体 SearchNode

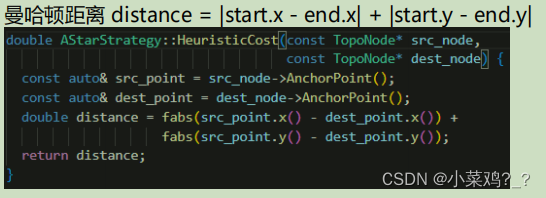
6.2 函数 HeuristcCost
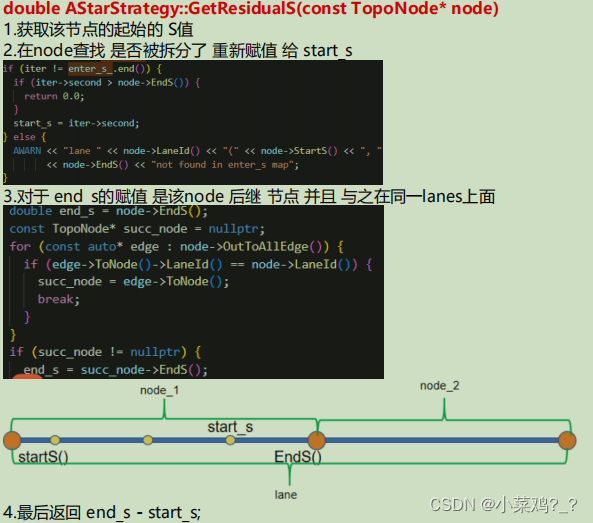
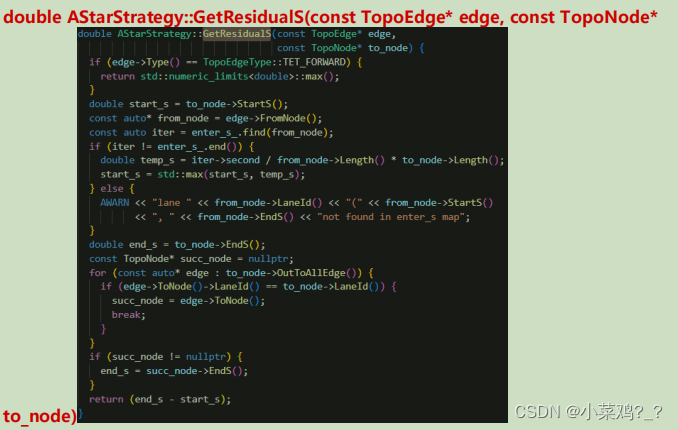
6.3 函数 GetResidualS
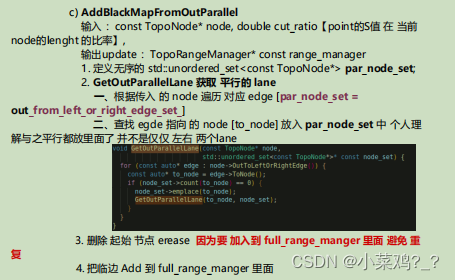
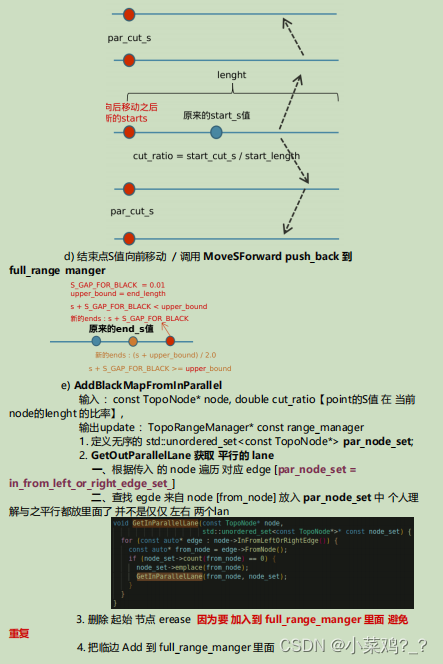
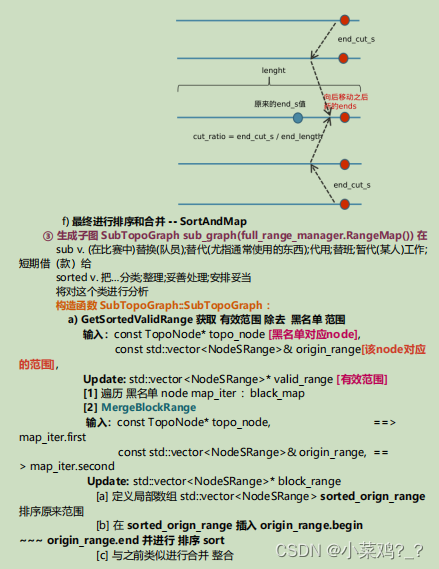
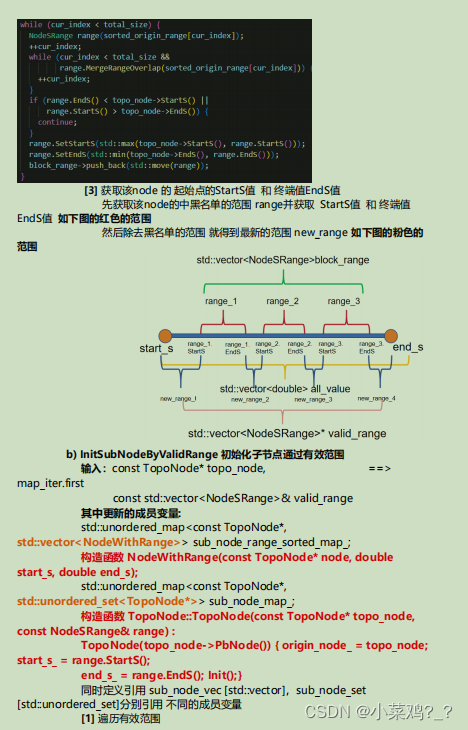
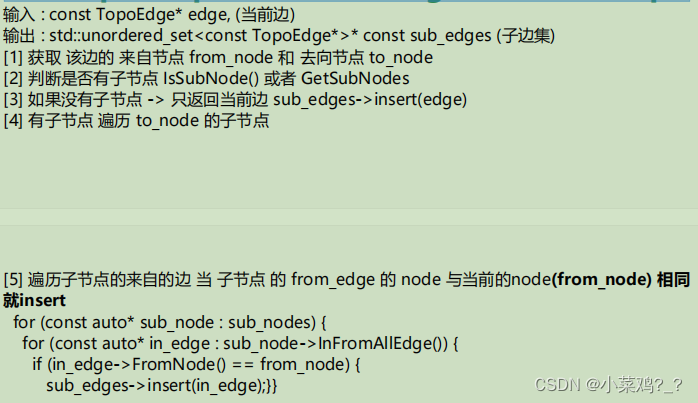
6.4 函数 SubTopoGraph::GetSubInEdgesIntoSubGraph
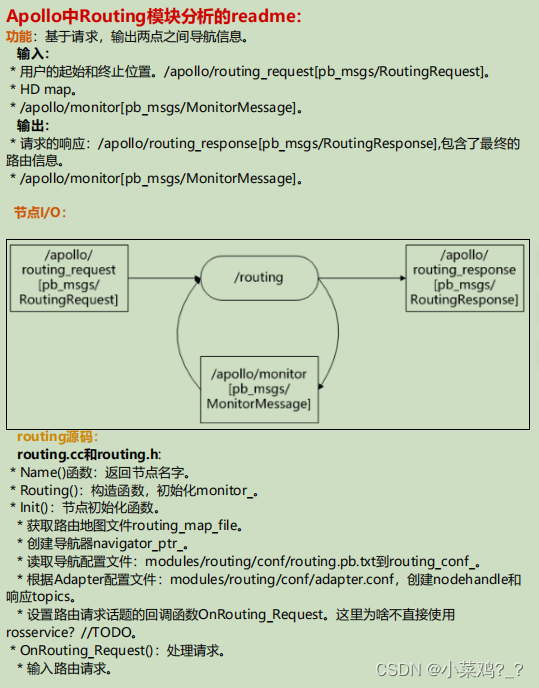
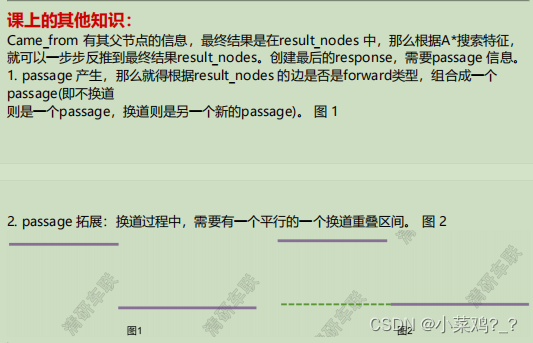
三、PNCmap 和 参考线提供者
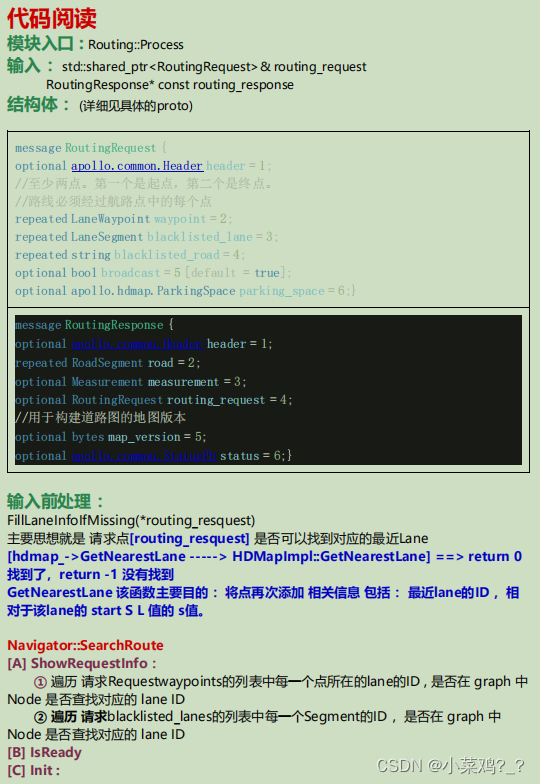
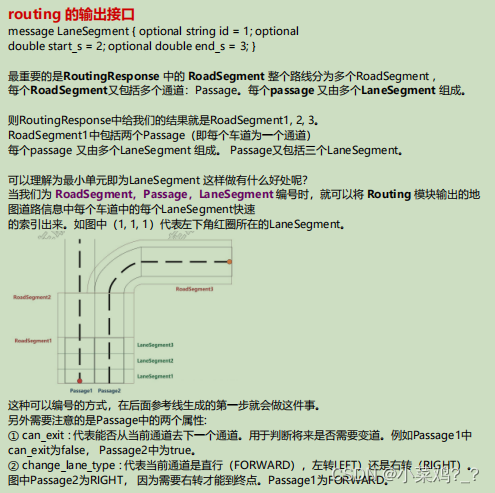
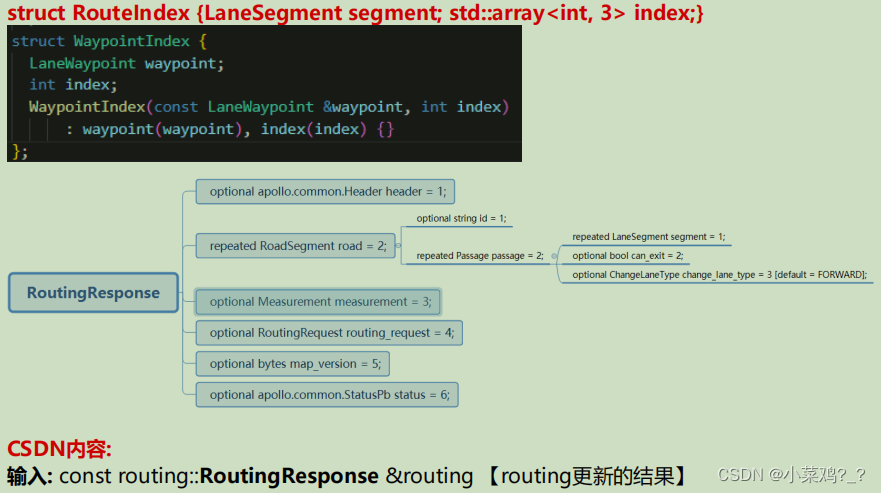
1. routing 的输出接口
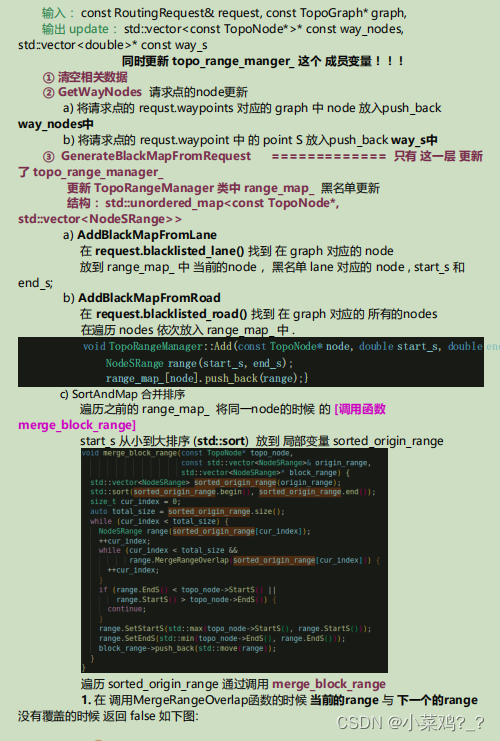
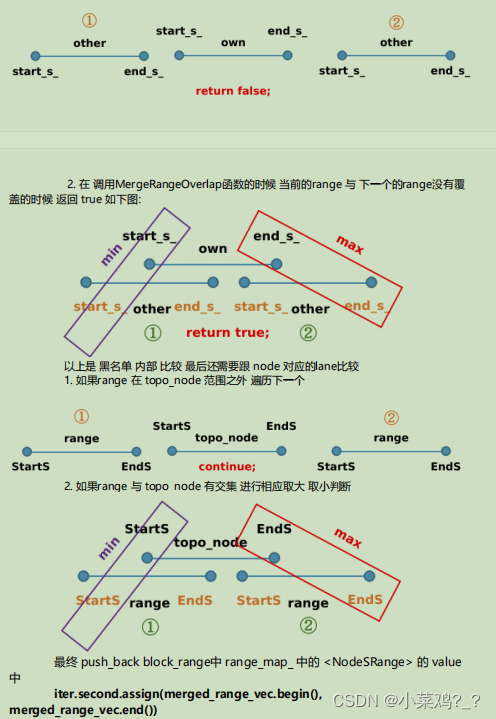
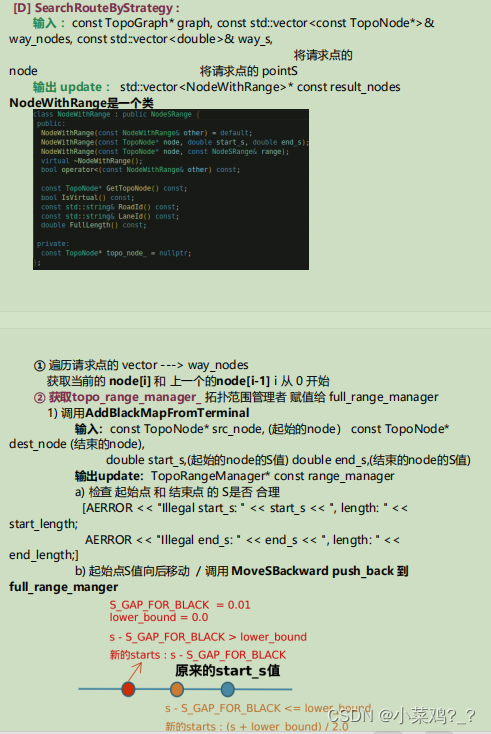
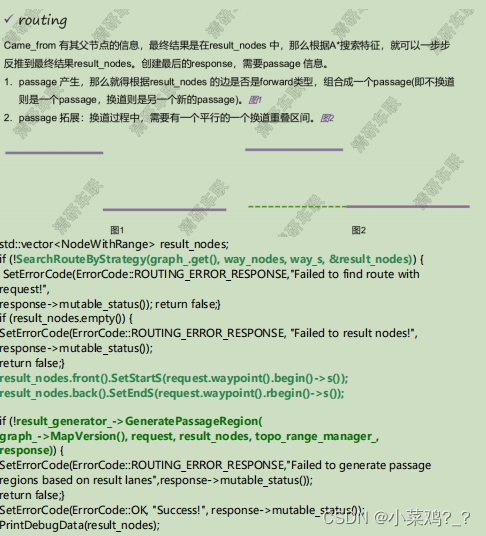
2. routing结束的最后的一点操作
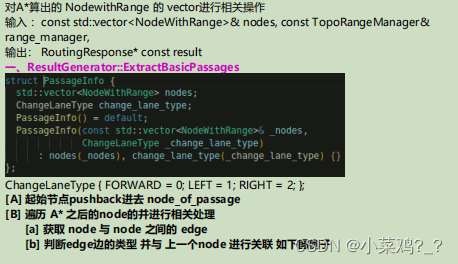
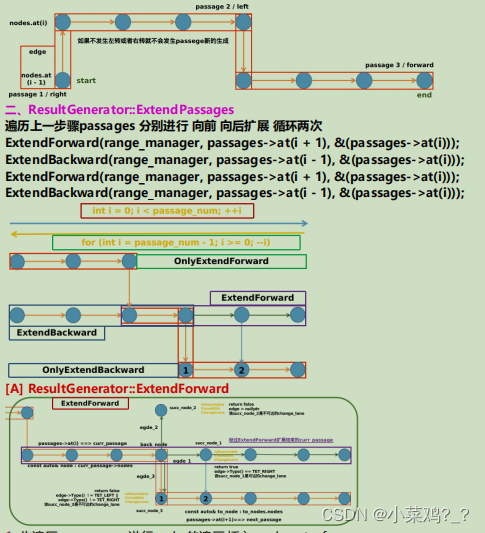
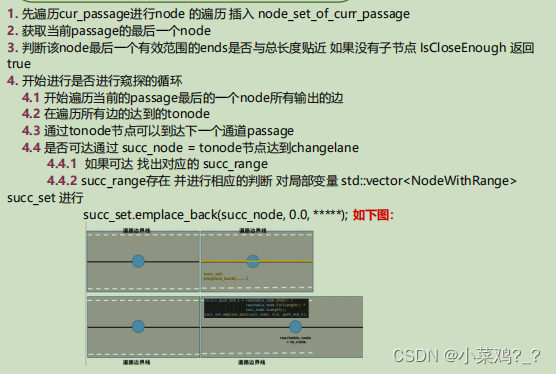
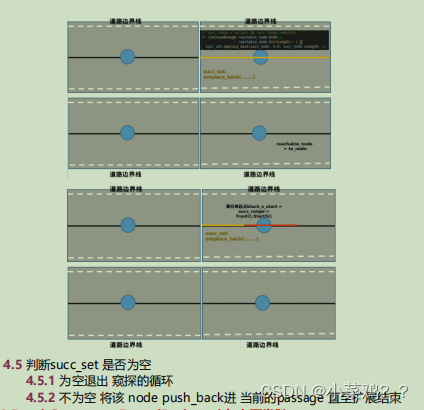
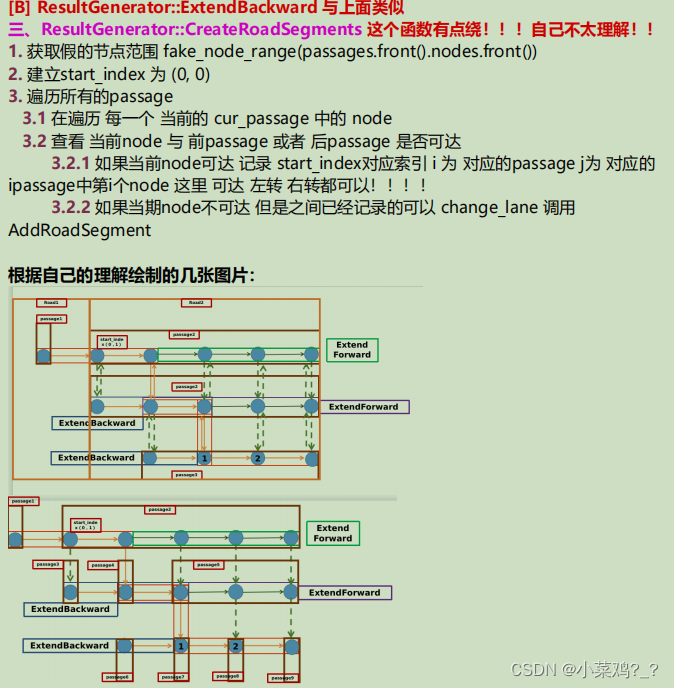
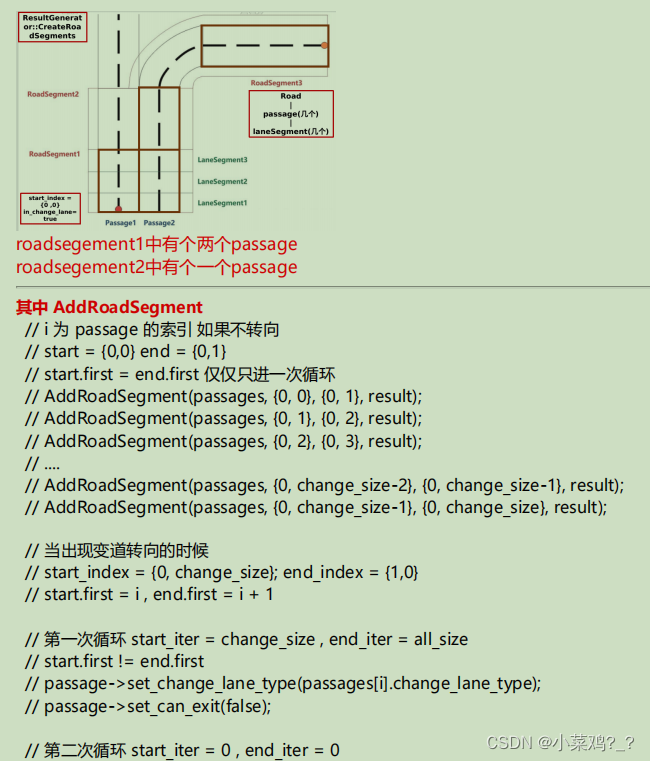
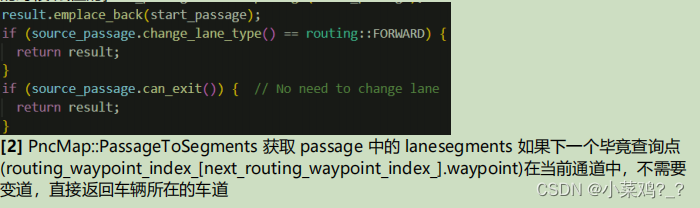
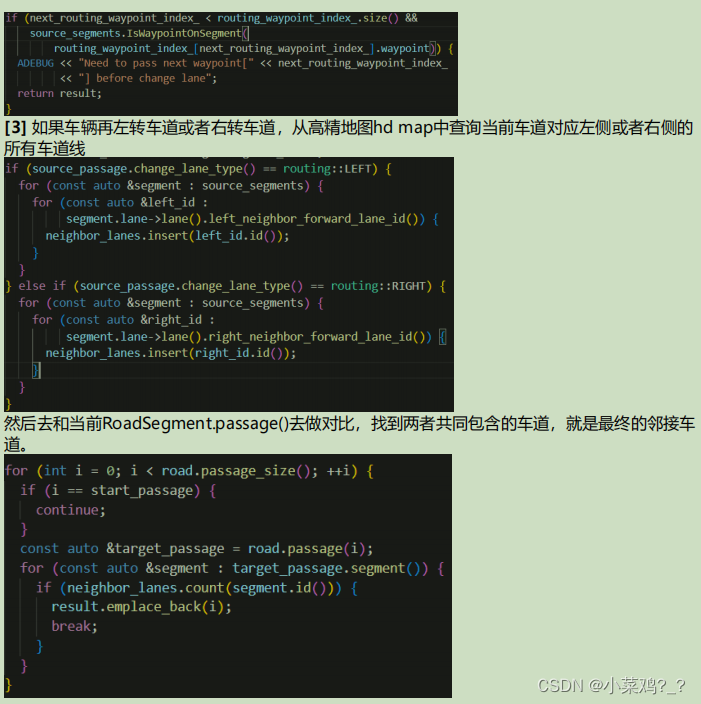
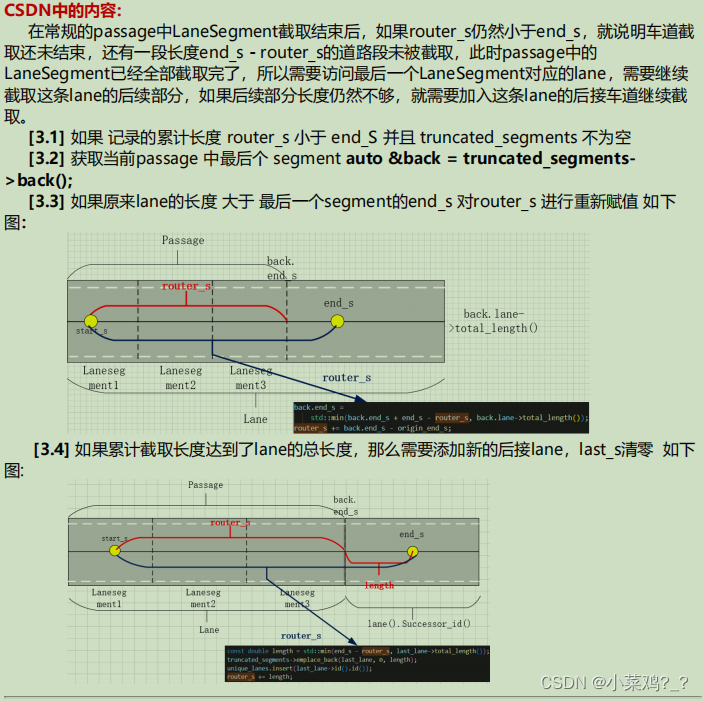
3. ResultGenerator::GeneratePassageRegio 生成通道区域
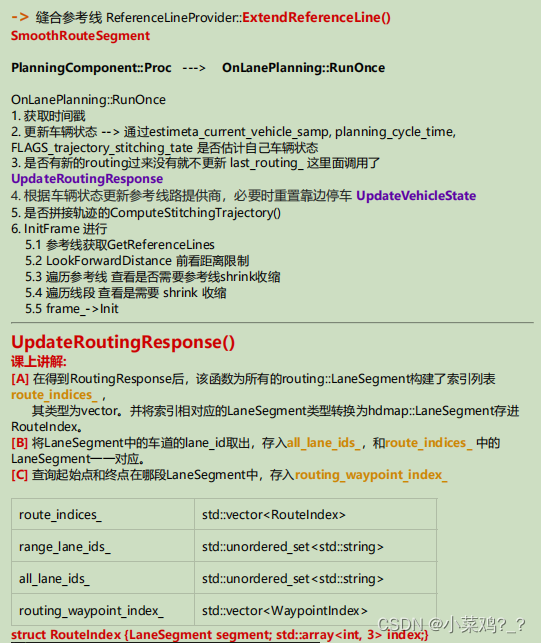
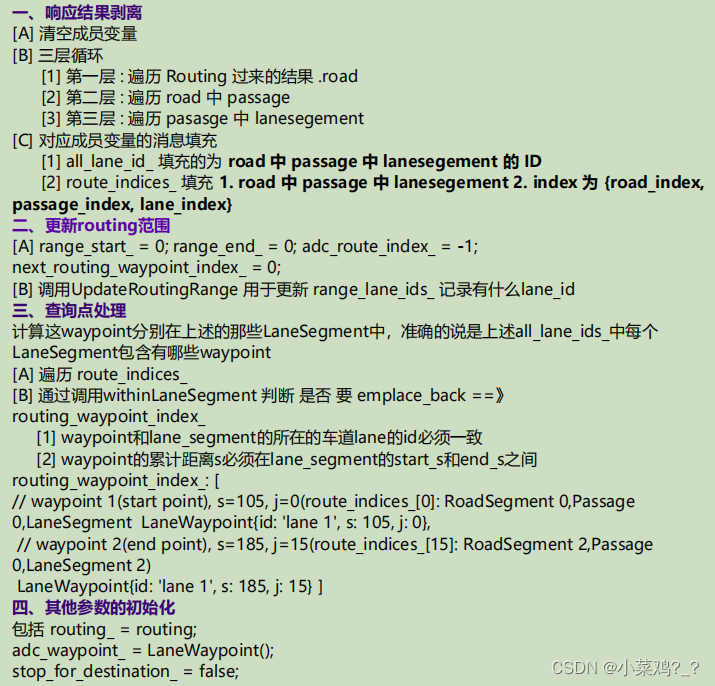
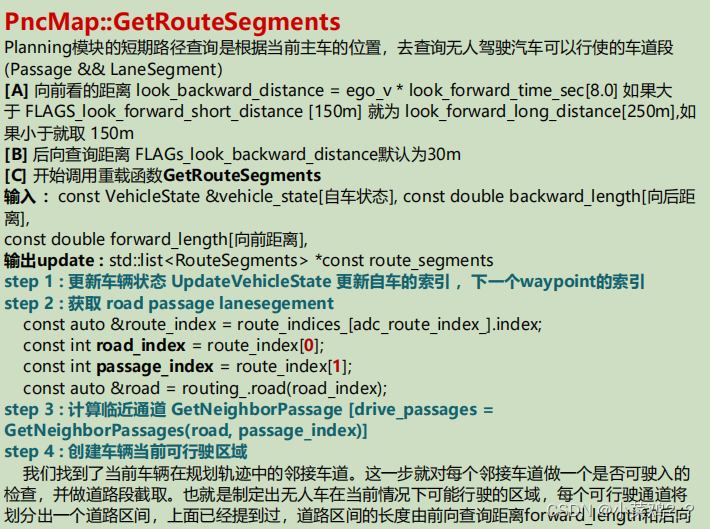
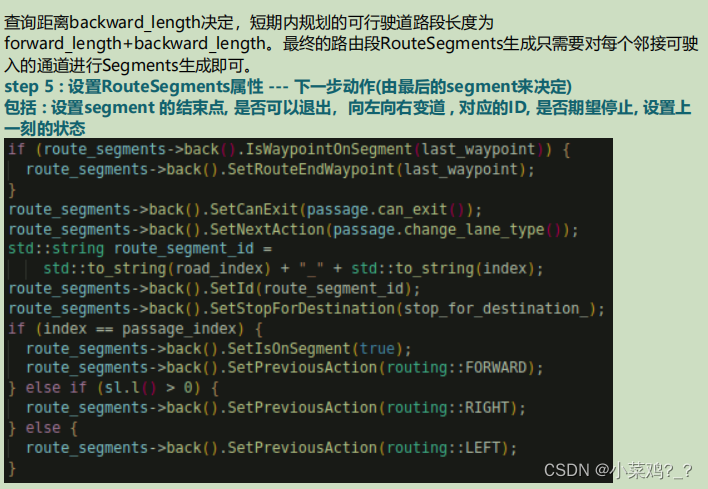
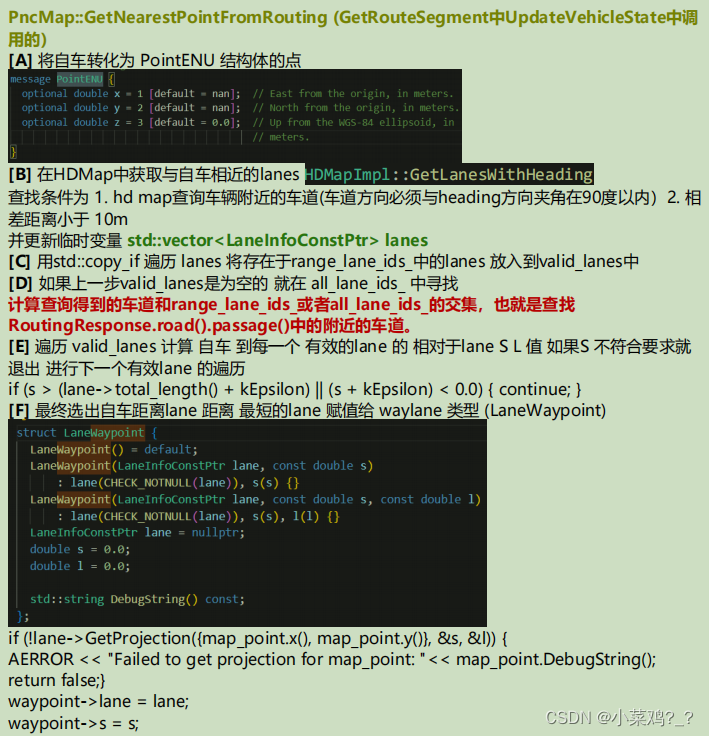
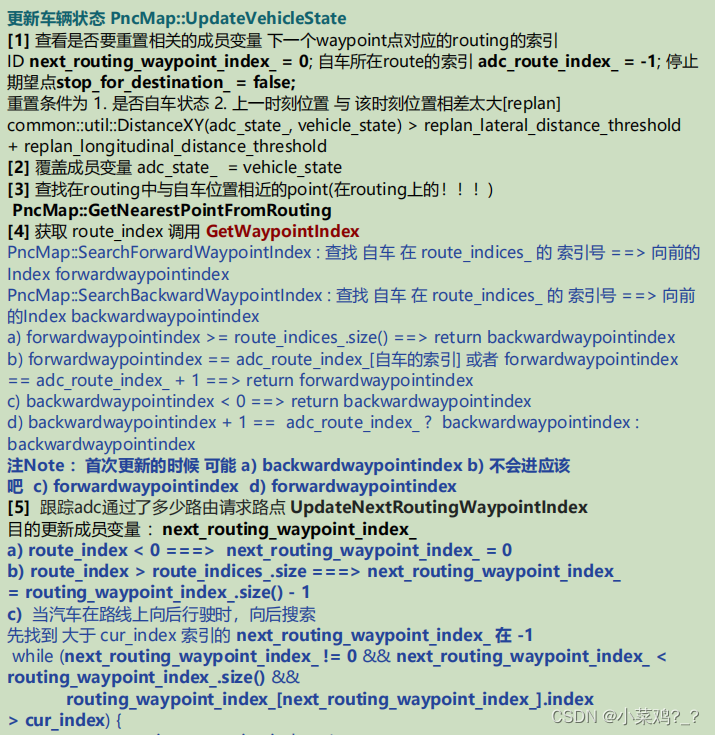
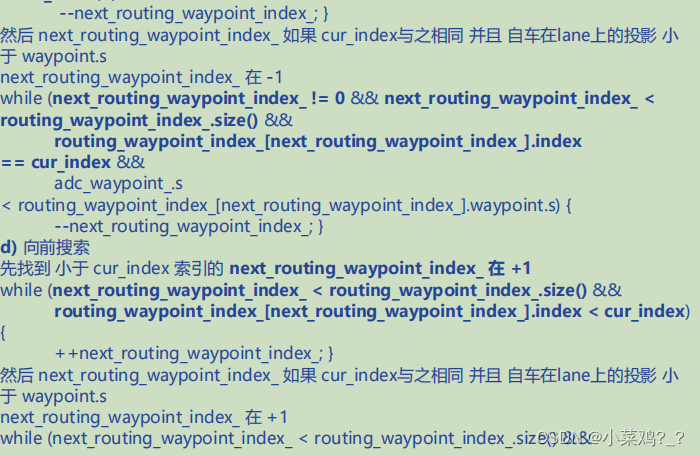
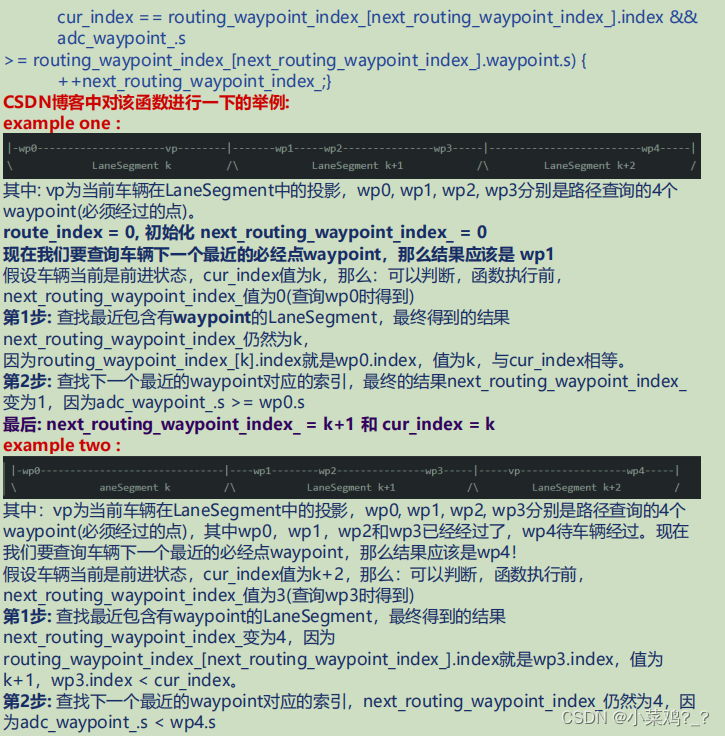
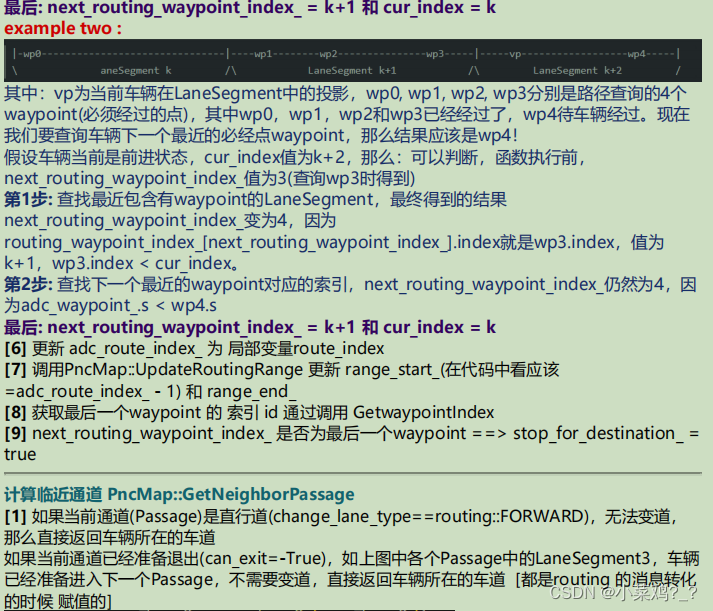
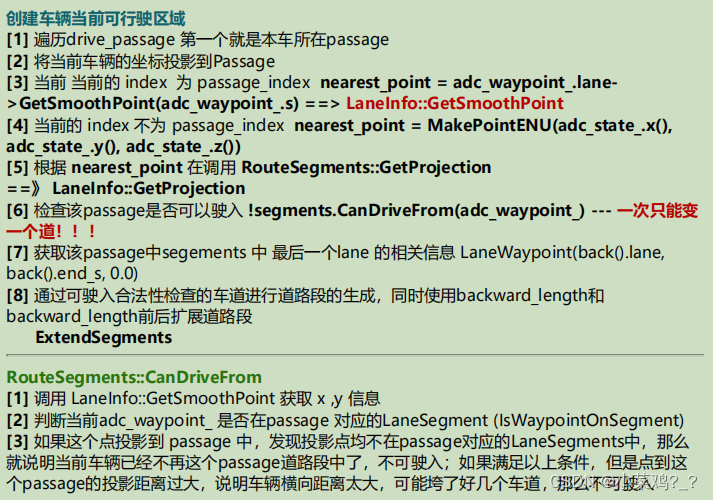
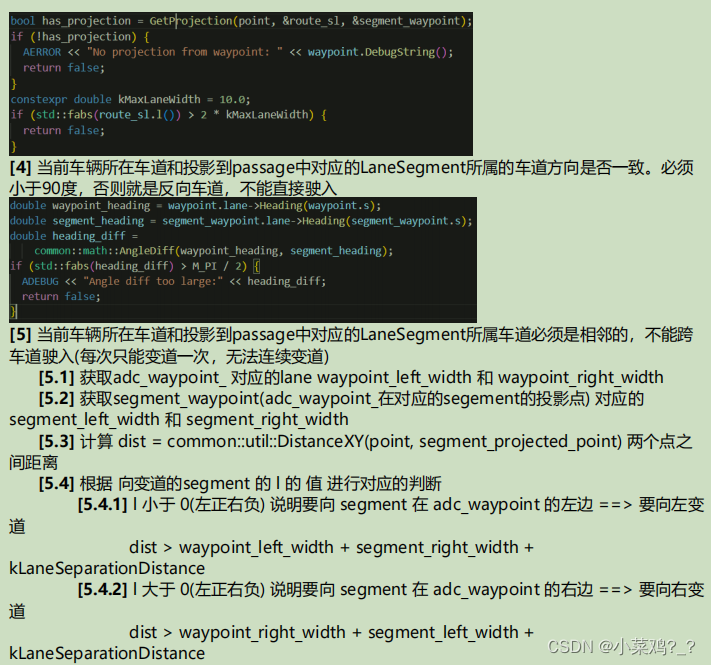
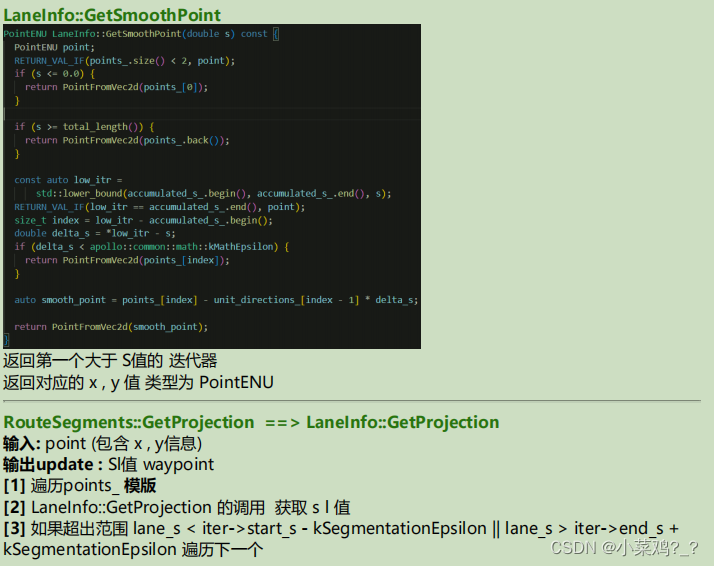
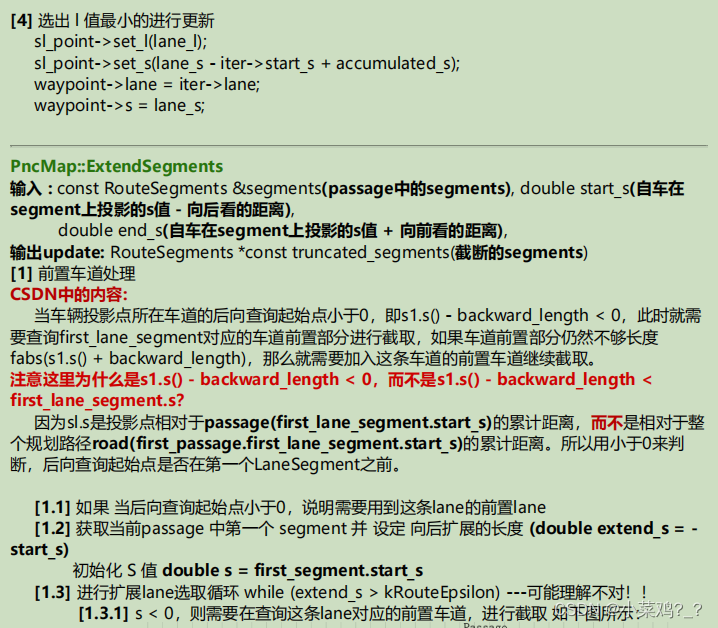
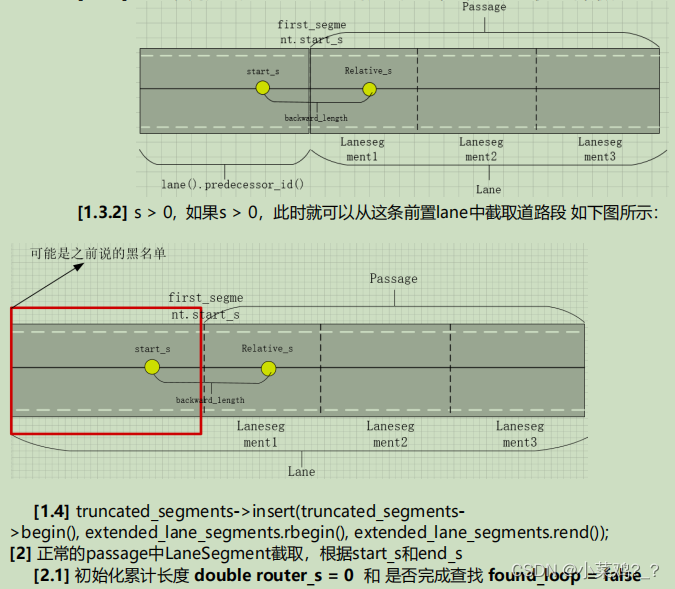
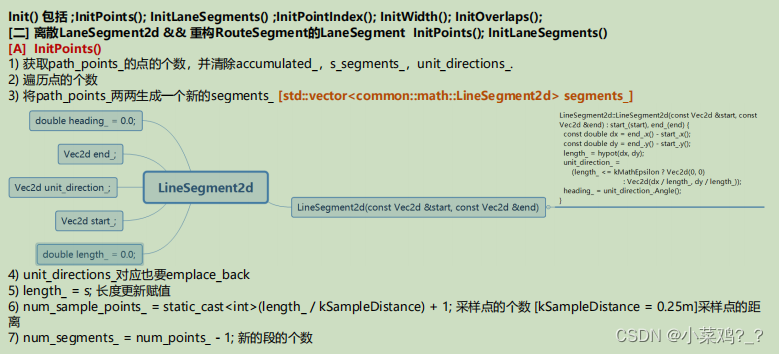
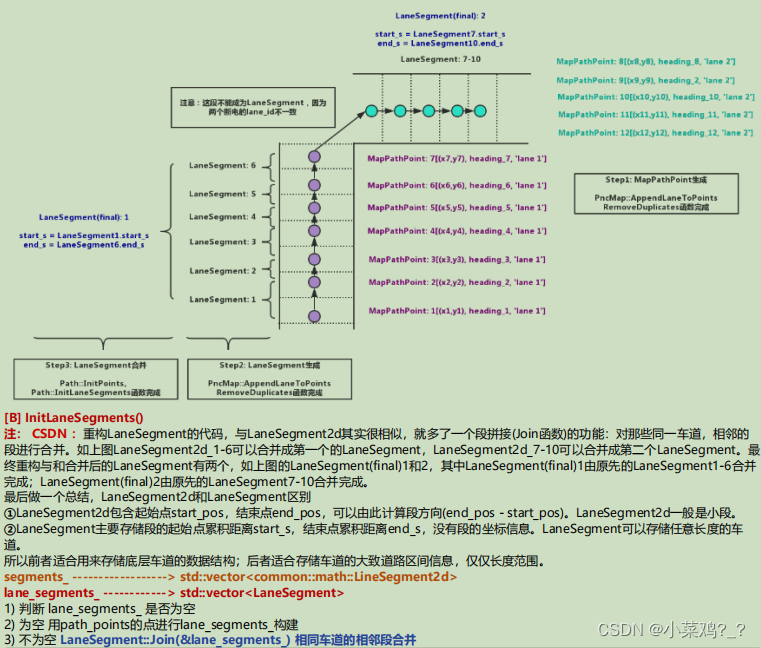
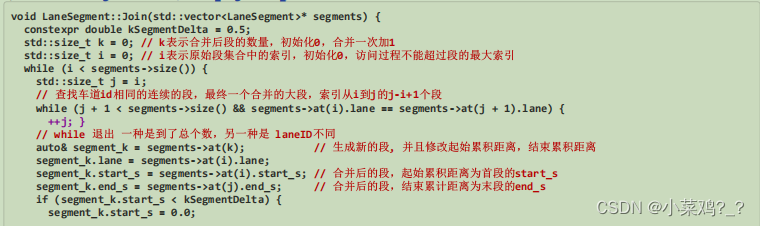
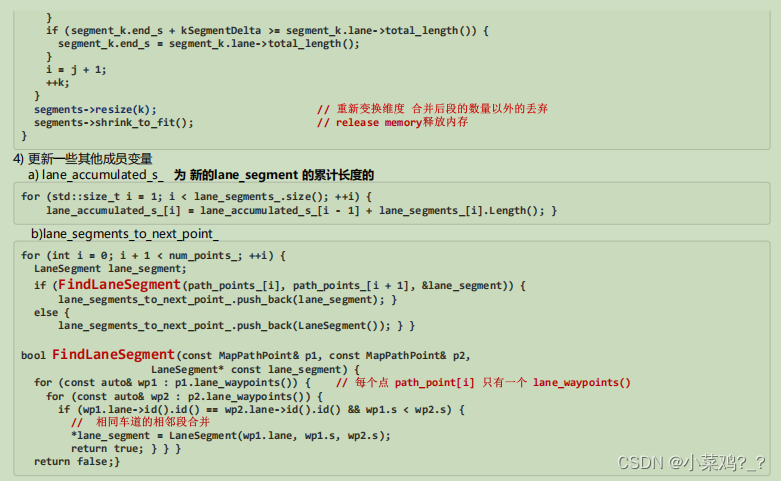
4. 局部路径规划前处理PncMap
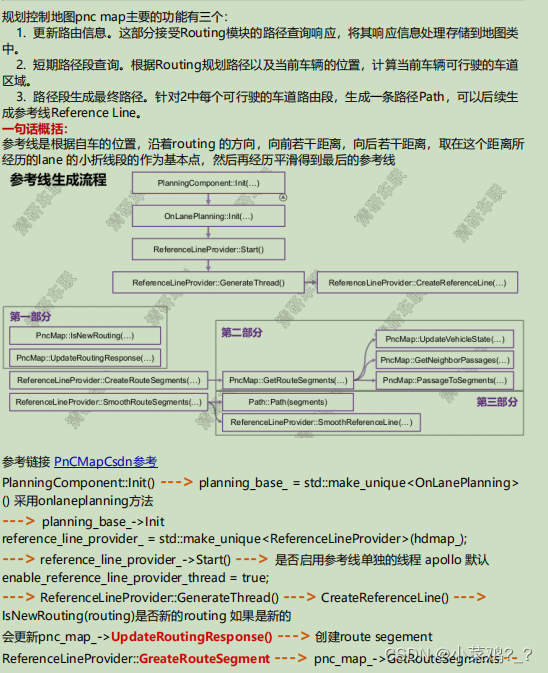
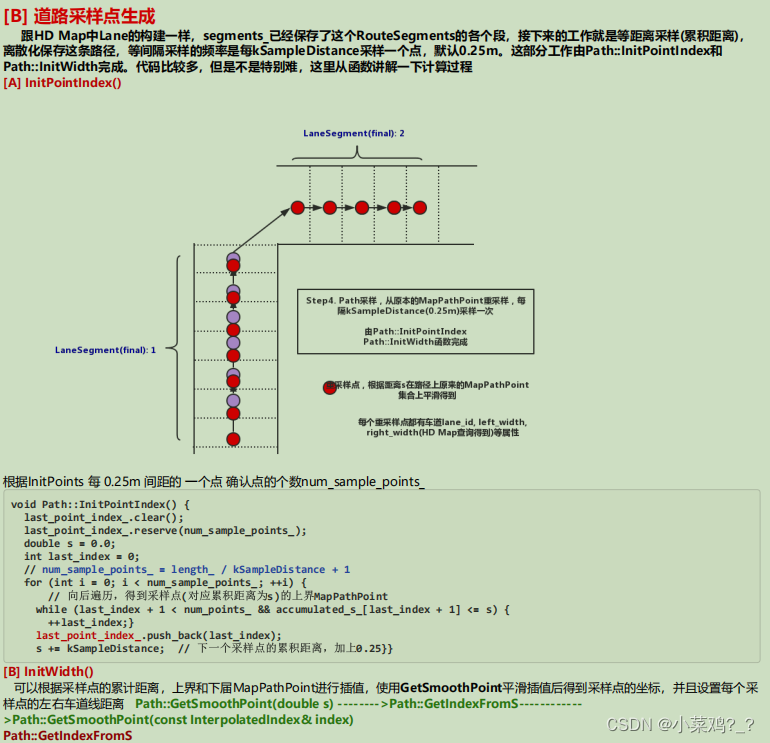
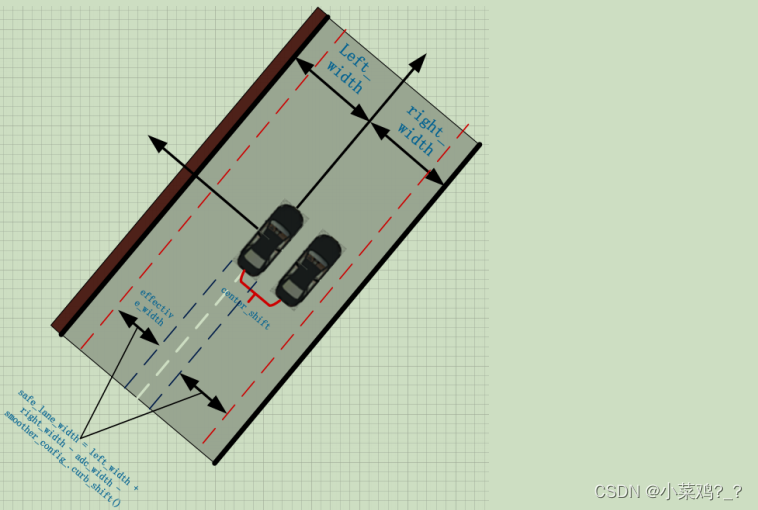
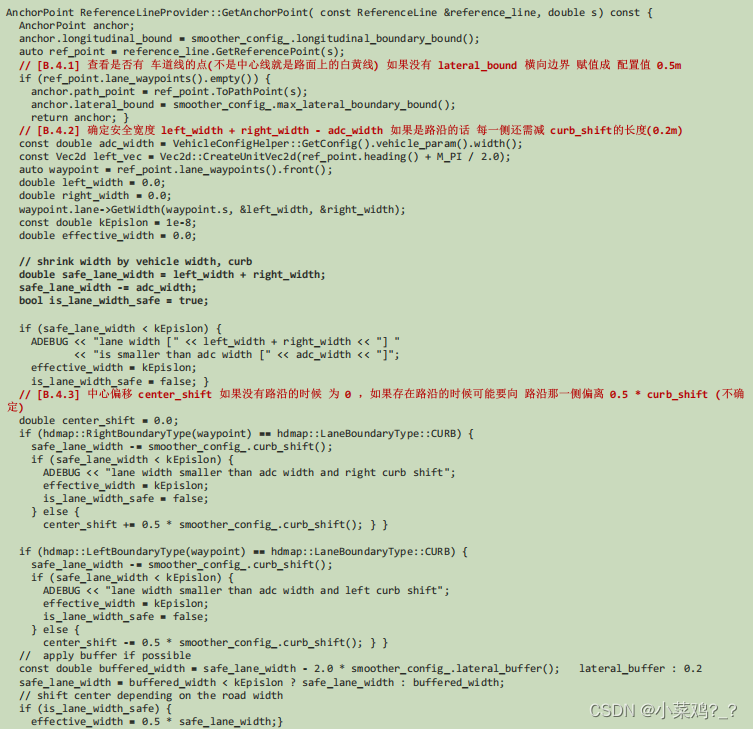
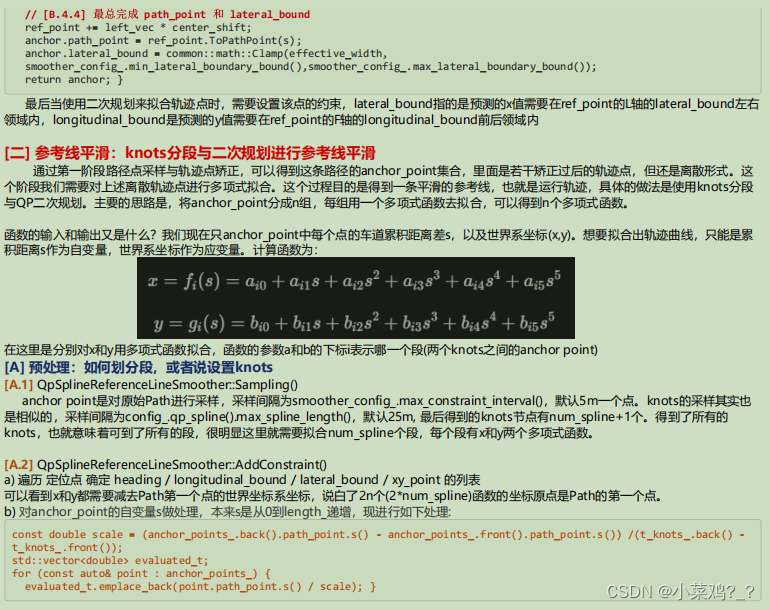
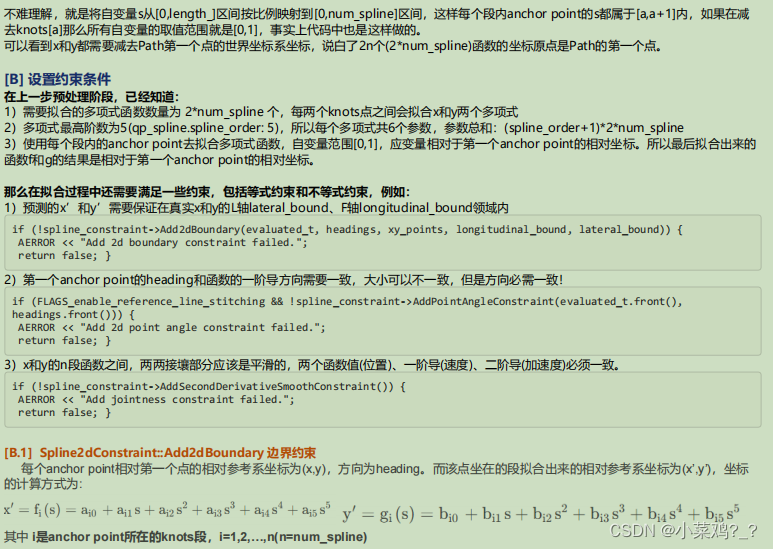
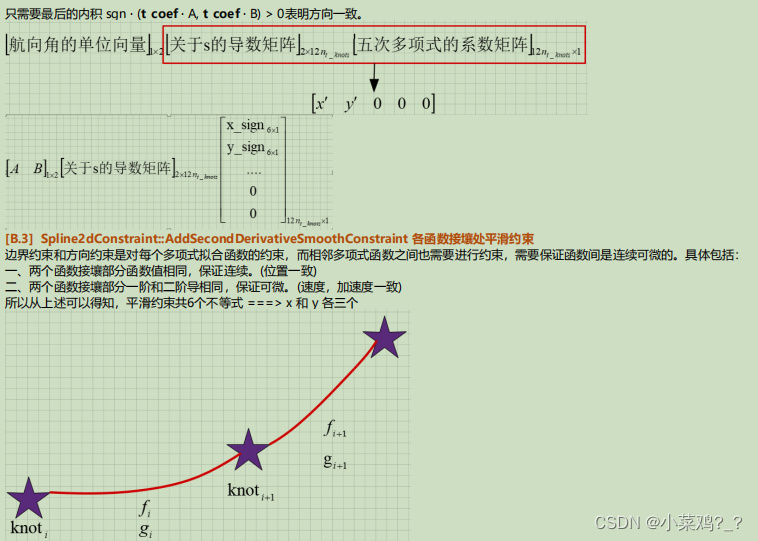
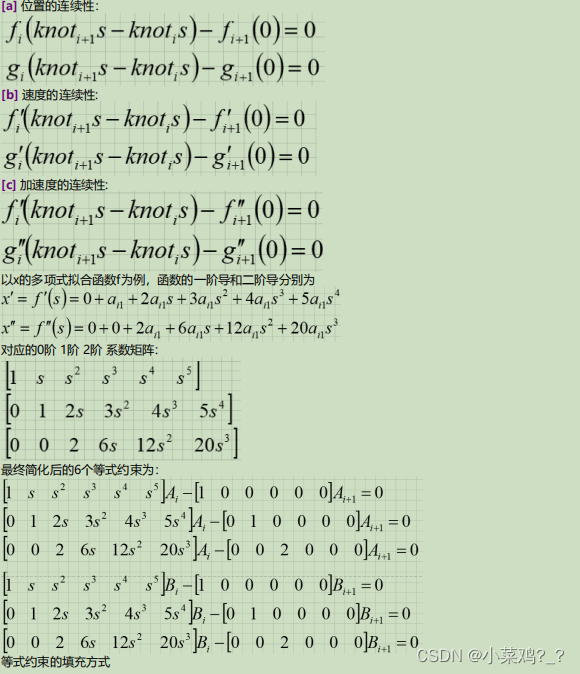
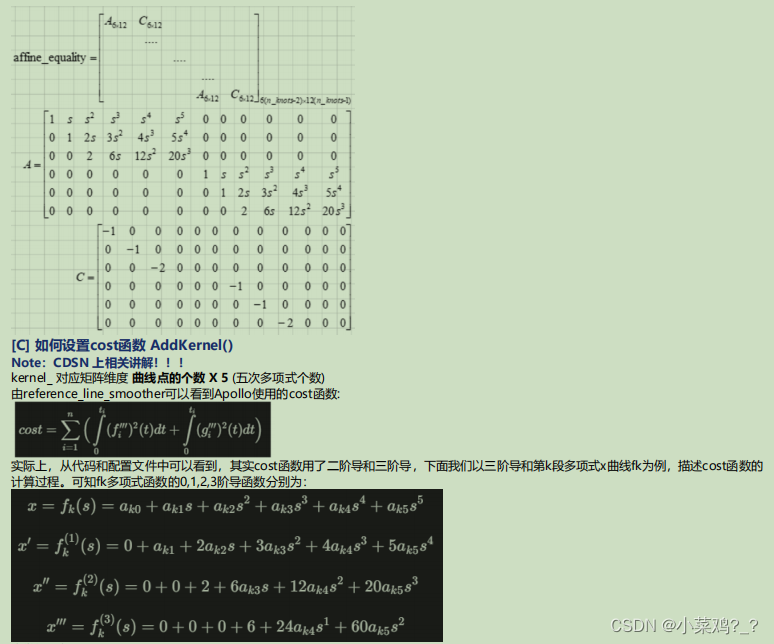
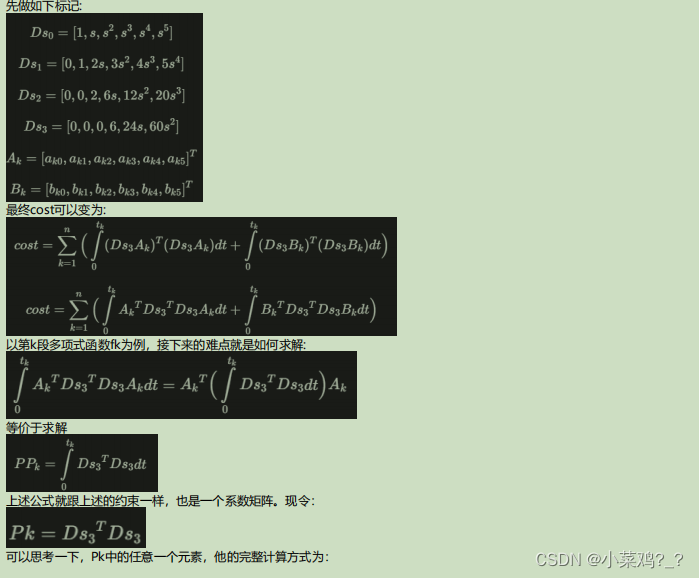
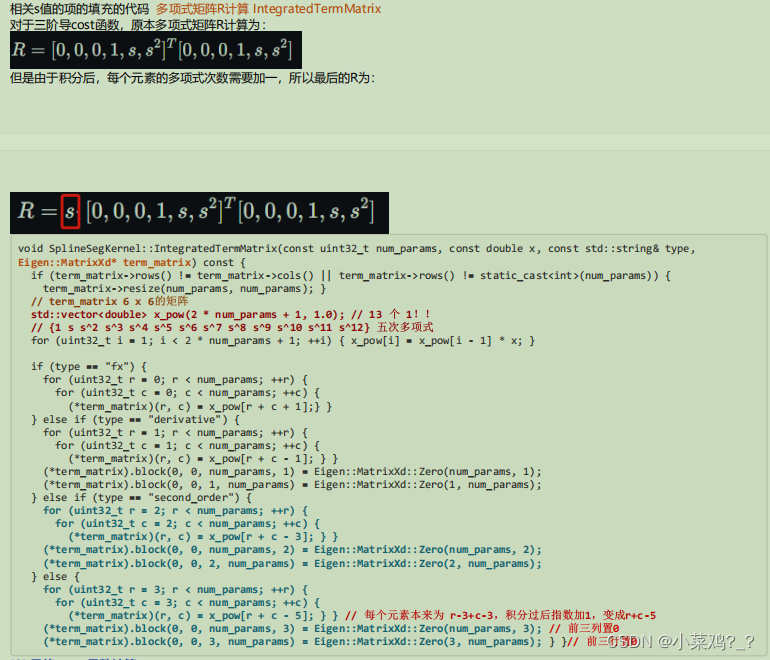
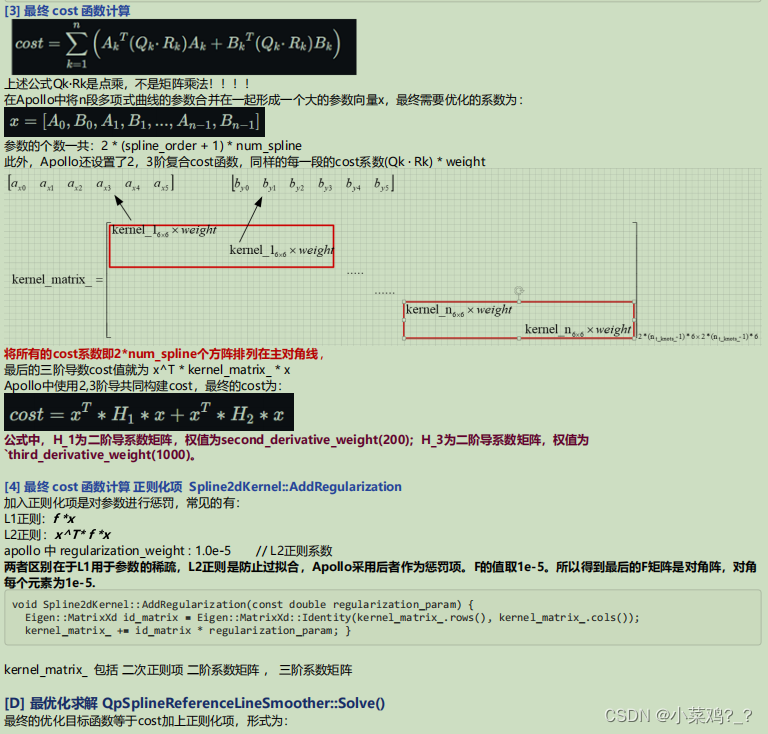
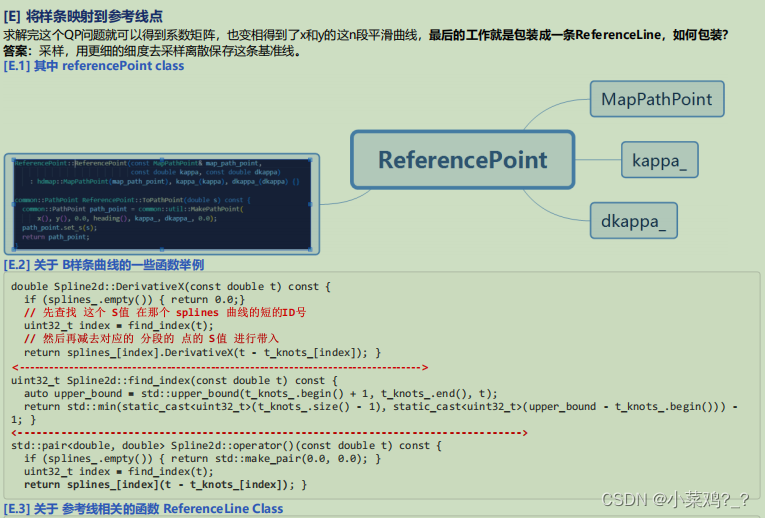
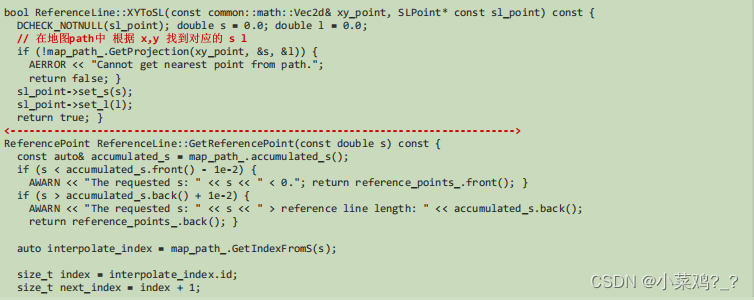
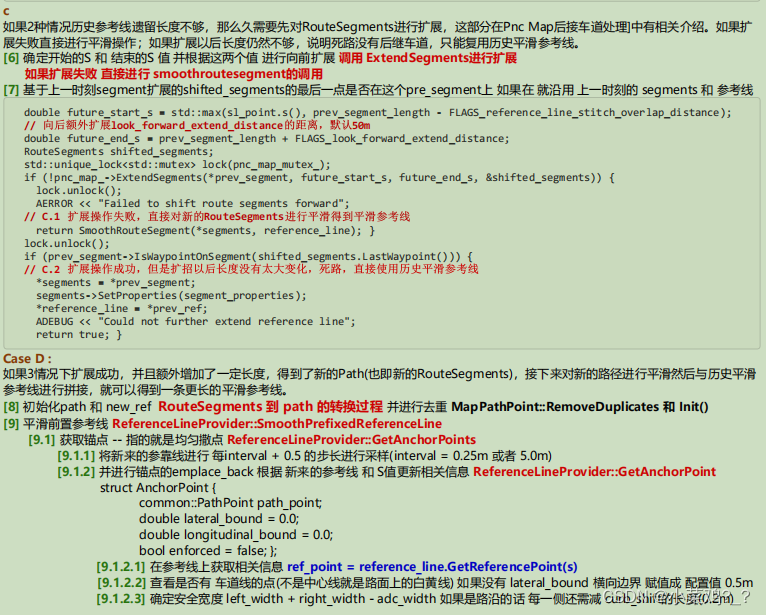
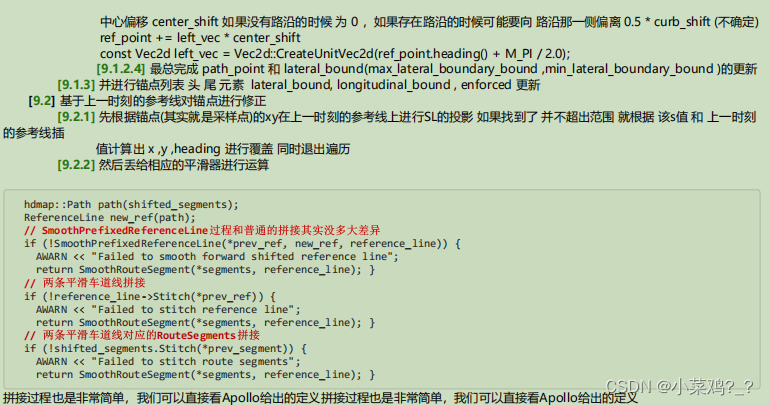
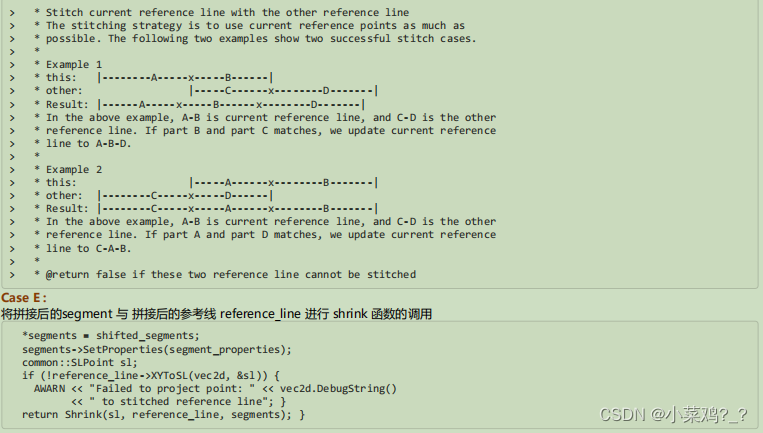
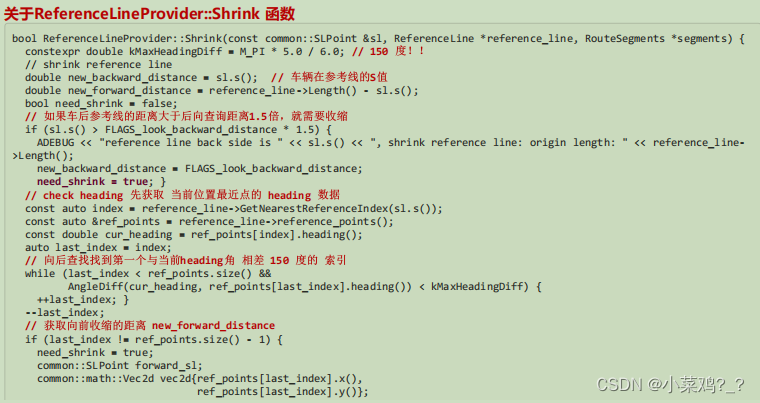
5. 局部路径规划前处理参考线生成






总结
老样子 把对应的pdf 下载链接贴在下面
https://download.csdn.net/download/qq_42027654/88281822