一.Realsense_ros功能包的安装
1.1下载realsense_ros源码
在Ros工作空间的src文件夹下输入命令:
git clone https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
ps:未安装第二个在编译时会报错。
解决方案详见博客:
添加链接描述
1.2编译环境,并设置环境变量
在工作空间目录下输入命令:
catkin_make
在设置环境变量过程中可能会遇到报错
报错:
RLException: [demo_t265.launch] is neither a launch file in package [learning_launch] nor is [learning_launch] a launch file name
The traceback for the exception was written to the log file
解决方案:
source catkin_ws/devel/setup.bash
二. Realsense_ros 案例实现
最后打开终端执行命令:
roslaunch realsense2_camera demo_t265.launch
结果图:
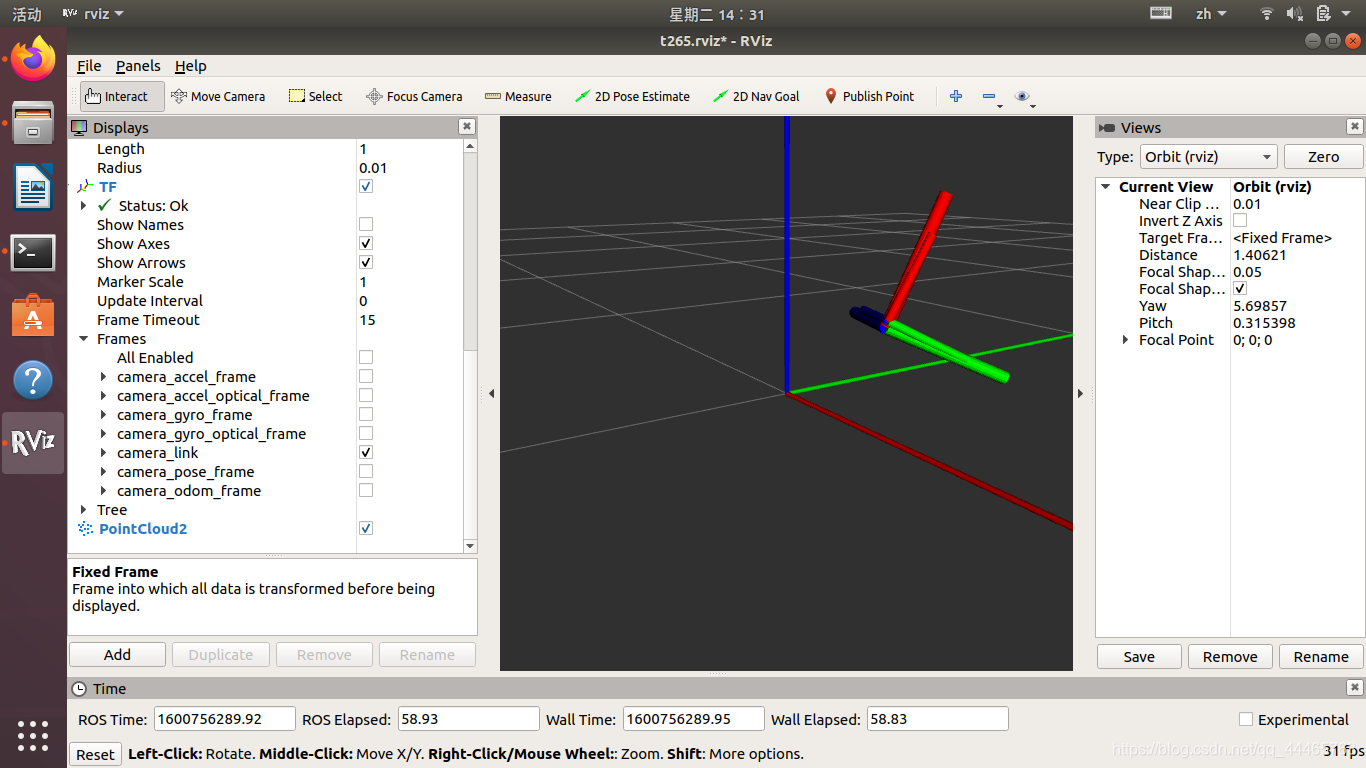
ps:在运行其他launch文件是由于有些软件还未安装所以无法运行,部分问题和报错还未找到原因。
非常感谢博主 @jmaosheng 的耐心解答,realsense_ros的教程主要跟着这位博主的博客所执行的,遇到了很多问题最后都解决了,再次感谢,博客链接如下:
添加链接描述