需要材料:
1、SG90舵机模块
2、HC-SR04超声波模块
3、震动传感器
4、蜂鸣器
5、若干杜邦线
1、PWM开发SG90
- PWM波为脉冲宽度调制,对模拟信号电平进行数字编码。通过调节占空比的变化来调节信号。
- 占空比:高电平的时间/整个信号的周期。
1.1、怎样通过C51单片机输出PWM波?
如果芯片内部模块能集成输出,一般观察手册或者芯片IO口都会标明这个是否是PWM口
如果没有集成PWM功能,可以通过IO口软件模拟,
1.2、通过定时器输出PWM波来控制SG90
如图为SG90舵机模块,黄色为PWM信号控制,红色和褐色分别为VCC和GND。当输入的PWM的占空比不同的时候,舵机模块的摆头幅度不同。一般情况如下:
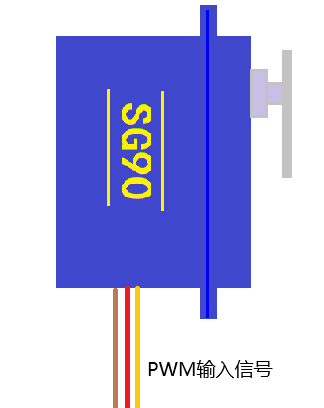
- PWM波的频率不能太高,大约50HZ,即周期=1/频率=1/50=0.02s,20ms左右
0.5ms-------------0度; 2.5% 对应1/40,
1.0ms------------45度; 5.0% 对应2/40
1.5ms------------90度; 7.5% 对应3/40
2.0ms-----------135度; 10.0% 对应4/40
2.5ms-----------180度; 12.5% 对应5/40
接下来通过C51单片机输出PWM波控制舵机的摆头(黄线连接P1.1口)代码如下:
#include <REGX52.H>
sbit sg_90 = P1^1;//黄线连接P1.1口
int cnt = 0; //标志位
int jd; //占空比的分子
void Delay300ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 3;
j = 26;
k = 223;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay2000ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 15;
j = 2;
k = 235;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Timer0_Init(void)
{
TMOD = 0x01;//配置定时器T0为16位定时器
TL0 = 0x33; //定时器计1个数为1.085us,则当舵机为0度的时候,需要0.5ms,
TH0 = 0xFE; //则定一个0.5ms的定时器
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1;
EA = 1;
}
void main(void)
{
Delay300ms();//给硬件准备时间
Timer0_Init();
jd = 1;//一上电,开始占空比为1/40,为0度
cnt = 0;
sg_90 = 1;//先给输出引脚一个高电平
while(1)
{//角度由135度到0度来回摆动
jd = 4;
cnt = 0;
Delay2000ms();
jd = 1;
cnt = 0;
Delay2000ms();
}
}
void Timer0_Handler() interrupt 1//中断函数
{
cnt++;
TL0 = 0x33;
TH0 = 0xFE;
//控制PWM波的占空比
if(cnt < jd){
sg_90 = 1;
}else{
sg_90 = 0;
}
if(cnt == 40){
cnt = 0;
sg_90 = 1;
}
}
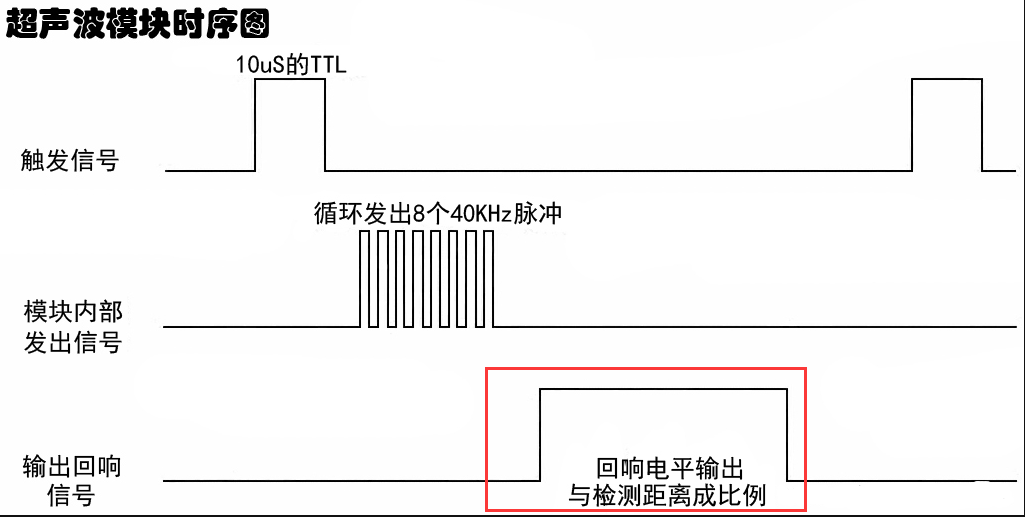
2、超声波测距模块的使用
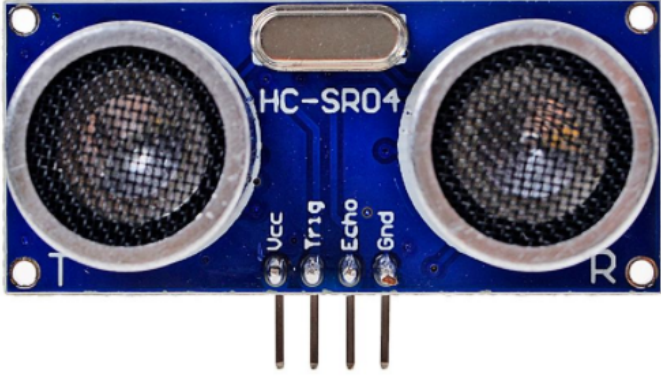
- 怎么让它发送波
Trig ,给Trig端口至少10us的高电平 - 怎么知道它开始发了
Echo信号,由低电平跳转到高电平,表示开始发送波 - 怎么知道接收了返回波
Echo,由高电平跳转回低电平,表示波回来了 - 怎么算时间
Echo引脚维持高电平的时间!
波发出去的那一下,开始启动定时器。波回来的那一下,我们开始停止定时器,计算出中间经过多少时间。距离 = 速度 (340m/s)* 时间/2
/*通过超声波模块控制LED1灯的亮灭,当手靠近超声波模块时,灯亮*/
#include <REGX52.H>
sbit Trig = P1^5;
sbit Echo = P1^6;
sbit LED1 = P3^7;
void Delay10us() //@11.0592MHz
{
unsigned char i;
i = 2;
while (--i);
}
void Timer0_Init(void)
{
TMOD = 0x01;
TL0 = 0;
TH0 = 0;//设置定时器T0从0开始数数
}
void Delay200ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 2;
j = 103;
k = 147;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main(void)
{
double time;
double dis;
Timer0_Init();
while(1){
Delay200ms();//先给单片机准备时间
//1、开始发波
Trig = 0;
Trig = 1;
Delay10us();
Trig = 0;
//2、检测ECHO引脚电平
while(Echo == 0);
TR0 = 1; //启动定时器
while(Echo == 1);
TR0 = 0; //关闭定时器
//3、计算定时开到定时关的时间(计算数的个数),
//2位二进制11,01。合并位1101怎么算?1101为(11*2^2)+01=13
time = (TH0 * 256 + TL0) * 1.085; //us为单位
//34000cm/s = 34cm/ms = 0.034cm/us
dis = time * 0.017; //cm为单位
if(dis < 10)
{
LED1 = 0;
}else
{
LED1 = 1;
}
TL0 = 0;
TH0 = 0;//定时器清零,以便下次测距
}
}
代码优化②:
/**优化:将定时器0改为定时器1,然后将超声波测距封装成为一个函数*/
#include <REGX52.H>
sbit Trig = P1^5;
sbit Echo = P1^6;
sbit LED1 = P3^7;
void Delay10us() //@11.0592MHz
{
unsigned char i;
i = 2;
while (--i);
}
void Delay200ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 2;
j = 103;
k = 147;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Timer1_Init(void)
{
//使用定时器1
TMOD &= 0x0F;
TMOD |= 0x10;
TL1 = 0;
TH1 = 0;//设置定时器T1从0开始数数
}
double get_distance()//超声波获得距离的函数
{
double time;
TL1 = 0;
TH1 = 0;//定时器清零,以便下次测距
//1、开始发波
Trig = 0;
Trig = 1;
Delay10us();
Trig = 0;
//2、检测ECHO引脚电平
while(Echo == 0);
TR1 = 1; //启动定时器
while(Echo == 1);
TR1 = 0; //关闭定时器
//3、计算定时开到定时关的时间(计算数的个数),
//2位二进制11,01。合并位1101怎么算?1101为(11*2^2)+01=13
time = (TH1 * 256 + TL1) * 1.085; //us为单位
//34000cm/s = 34cm/ms = 0.034cm/us
return (time * 0.017); //cm为单位;
}
void main(void)
{
double dis;
Timer1_Init();
while(1){
Delay200ms();//先给单片机准备时间
dis = get_distance();
if(dis < 10)
{
LED1 = 0;
}else
{
LED1 = 1;
}
}
}
3、感应开关盖垃圾桶
舵机和超声波代码整合,舵机用定时器0,超声波用定时器1。
1、实现物体靠近后,自动开盖,2秒后关盖。
2、查询的方式添加按键控制
3、 查询的方式添加震动控制
#include <REGX52.H>
sbit SW1 = P2^1;//按键SW1连接的是P2.1口
sbit Trig = P1^5;
sbit Echo = P1^6;
sbit LED1 = P3^7;
sbit sg_90 = P1^1;//黄线连接P1.1口
sbit vibrate = P3^2;//震动传感器连接P3.2口,使用外部中断0
int cnt = 0; //标志位
int jd; //占空比的分子
int vib_mark; //震动传感器的标志位
void Delay10us() //@11.0592MHz
{
unsigned char i;
i = 2;
while (--i);
}
void Delay200ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 2;
j = 103;
k = 147;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay2000ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 15;
j = 2;
k = 235;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void EX0_Init()//触发中断0初始化
{
EX0 = 1;
EA = 1;
IT0 = 0;//低电平触发
}
void Timer0_Init(void)//定时器T0中断初始化
{
TMOD &= 0xF0;//配置定时器T0为16位定时器
TMOD |= 0x01;
TL0 = 0x33; //定时器计1个数为1.085us,则当舵机为0度的时候,需要0.5ms,
TH0 = 0xFE; //则定一个0.5ms的定时器
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1;
EA = 1;
}
void Timer1_Init(void)//定时器T1初始化
{
//使用定时器1
TMOD &= 0x0F;
TMOD |= 0x10;
TL1 = 0;
TH1 = 0;//设置定时器T1从0开始数数
}
double get_distance()
{
double time;
TL1 = 0;
TH1 = 0;//定时器清零,以便下次测距
//1、开始发波
Trig = 0;
Trig = 1;
Delay10us();
Trig = 0;
//2、检测ECHO引脚电平
while(Echo == 0);
TR1 = 1; //启动定时器
while(Echo == 1);
TR1 = 0; //关闭定时器
//3、计算定时开到定时关的时间(计算数的个数),
//2位二进制11,01。合并位1101怎么算?1101为(11*2^2)+01=13
time = (TH1 * 256 + TL1) * 1.085; //us为单位
//34000cm/s = 34cm/ms = 0.034cm/us
return (time * 0.017); //cm为单位;
}
void sg90_0(void) //舵机0度
{
sg_90 = 1;//先给输出引脚一个高电平
jd = 1;//一上电,开始占空比为1/40,为0度
cnt = 0;
}
void sg90_90(void)//舵机90度
{
sg_90 = 1;//先给输出引脚一个高电平
jd = 3;//一上电,开始占空比为3/40,为90度
cnt = 0;
}
void main(void)
{
double dis;
Timer0_Init();
Timer1_Init();
EX0_Init();
sg90_0();
while(1){
Delay200ms();//先给单片机准备时间
dis = get_distance();
if(dis < 10 || SW1 == 0 || vib_mark == 1)
{
vib_mark = 0;
LED1 = 0;
sg90_90();
Delay2000ms();
}
else
{
LED1 = 1;
sg90_0();
Delay200ms();
}
}
}
void Timer0_Handler() interrupt 1//中断函数
{
cnt++;
TL0 = 0x33;
TH0 = 0xFE;
//控制PWM波的占空比
if(cnt < jd){
sg_90 = 1;
}else{
sg_90 = 0;
}
if(cnt == 40){
cnt = 0;
sg_90 = 1;
}
}
void EX0_Handler() interrupt 0//触发中断0函数
{
vib_mark = 1;
}
为什么我们使用震动传感器控制的时候不直接if(dis < 10 || SW1 == 0 || vibrate== 0)喃?这样判断不是跟简单吗?
原因:因为震动传感器因为震动而发出的低电平0不仅微弱,而且时间比较断。当震动传感器给出低电平的时候,而单片机还在执
Delay2000ms();而当进入判断的时候,可能震动传感器发出的低电平已经消失了,已经变成高电平了。这样就会导致震动传感器不灵敏。
所以,通过外部中断来改变标志位,这样就会规避这个问题。当震动时,触发中断,标志位变为1,等待判断。只有进入判断后标志位才变回0。